Vous aimerez peut-être aussi
- Maîtriser le diagramme de Gantt: Comprendre et utiliser efficacement le logiciel open source "Gantt Project"D'EverandMaîtriser le diagramme de Gantt: Comprendre et utiliser efficacement le logiciel open source "Gantt Project"Pas encore d'évaluation
- API Du Grafcet Au Ladder v3Document10 pagesAPI Du Grafcet Au Ladder v3Àdiil Tahouri85% (13)
- Rapport Sur Les Automates ProgrammablesDocument21 pagesRapport Sur Les Automates ProgrammablesMohamed BenrahalPas encore d'évaluation
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- 15238-TP API Pont Roulant PDFDocument4 pages15238-TP API Pont Roulant PDFZakariaEssabiriPas encore d'évaluation
- ClassicLadder - Tutoriel PDFDocument15 pagesClassicLadder - Tutoriel PDFPierre MarechalPas encore d'évaluation
- SiemensDocument13 pagesSiemensanisonfirePas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- CFL02 - Introduction À L'automatisme Sous FluidSIM - Pilotage Des Stations MPSDocument12 pagesCFL02 - Introduction À L'automatisme Sous FluidSIM - Pilotage Des Stations MPSYassine AzougaghPas encore d'évaluation
- Les macros avec OpenOffice CALC: La programmation BASIC pour tousD'EverandLes macros avec OpenOffice CALC: La programmation BASIC pour tousPas encore d'évaluation
- Laboratoires ProgDocument49 pagesLaboratoires Progdussault.sPas encore d'évaluation
- Rapport de AKAFFOUDocument16 pagesRapport de AKAFFOUkpea chris dylanPas encore d'évaluation
- machine a remplir et a boucherDocument17 pagesmachine a remplir et a boucherIbra YAACOUBIPas encore d'évaluation
- Présentation AutoDocument18 pagesPrésentation AutoyahyaPas encore d'évaluation
- TD Mesures en ReseauDocument25 pagesTD Mesures en ReseauKhaled OuniPas encore d'évaluation
- TP03 Api Berra, Gasmi, Bouchena, DjerfiliDocument17 pagesTP03 Api Berra, Gasmi, Bouchena, Djerfilibenesseddik.abdessalemePas encore d'évaluation
- TP AutomgenDocument5 pagesTP AutomgenLamya BouladassePas encore d'évaluation
- Polycopié de TP API M1 2024Document18 pagesPolycopié de TP API M1 2024ghanemadel177Pas encore d'évaluation
- TP AutomgenDocument7 pagesTP AutomgenAmine BouchouchaPas encore d'évaluation
- TP AUS Ascenseur VirtuelDocument4 pagesTP AUS Ascenseur Virtuelaschkroft100% (1)
- TP Api1-1 MicroLogix1200Document6 pagesTP Api1-1 MicroLogix1200Mohamed RgnPas encore d'évaluation
- Rattrapage Cpi1 Iia 2soir Et JourDocument4 pagesRattrapage Cpi1 Iia 2soir Et Jourbertrand Nathan ayenePas encore d'évaluation
- AutomatesDocument47 pagesAutomatesYoussef ElalaouiPas encore d'évaluation
- Rapport de La Simulation Du TPDocument11 pagesRapport de La Simulation Du TPmohamed oukiliPas encore d'évaluation
- Abdou. Initiation API Millenium 3Document21 pagesAbdou. Initiation API Millenium 3sethabdellahPas encore d'évaluation
- CamScanner 04-12-2023 20.37Document4 pagesCamScanner 04-12-2023 20.37Fatimaezzahraa SouadPas encore d'évaluation
- TP4 Mini Projets (2 Thèmes)Document3 pagesTP4 Mini Projets (2 Thèmes)full metalPas encore d'évaluation
- Pplication Sur La Programmation en MikropascalDocument15 pagesPplication Sur La Programmation en MikropascalOmar MedbouhPas encore d'évaluation
- Exercices Sur GrafcetDocument27 pagesExercices Sur Grafcetsamer matoussiPas encore d'évaluation
- TD Api GsiDocument4 pagesTD Api Gsikhawlaaaa100% (1)
- TP Init Step7-2Document11 pagesTP Init Step7-2chimbwa100% (1)
- Programmation Pl7 Micro CompleteDocument11 pagesProgrammation Pl7 Micro CompleteARMINDO AFONSOPas encore d'évaluation
- Initiation À LABVIEW (Prise en Main)Document6 pagesInitiation À LABVIEW (Prise en Main)pilousPas encore d'évaluation
- TP2 211Document4 pagesTP2 211khawlaaaaPas encore d'évaluation
- Mcensl1 2011Document49 pagesMcensl1 2011Meryama NadimPas encore d'évaluation
- Enonce TME1 Et 2Document6 pagesEnonce TME1 Et 2Izzadine Alkhali MassarPas encore d'évaluation
- TP Csi 2010 2011Document31 pagesTP Csi 2010 2011alainPas encore d'évaluation
- Master IT1 S2 - Automatisme Et Supervision 2007 TP3 Réseau Et SupervisionDocument2 pagesMaster IT1 S2 - Automatisme Et Supervision 2007 TP3 Réseau Et SupervisionIMO AmoPas encore d'évaluation
- TP Init CoDeSysDocument16 pagesTP Init CoDeSysarcosse6940Pas encore d'évaluation
- TP Automate ProgrammableDocument8 pagesTP Automate ProgrammableSamba SallPas encore d'évaluation
- TP Automatique Seq PDFDocument11 pagesTP Automatique Seq PDFKoúp CobainPas encore d'évaluation
- Chapitre 1 GrafcetDocument22 pagesChapitre 1 GrafcetBen Mekki Houcine80% (5)
- SpéP - TD2 - BouclesDocument2 pagesSpéP - TD2 - BouclesRayane HmzPas encore d'évaluation
- Automgen GrafcetDocument6 pagesAutomgen GrafcetMouncef El Marghichi0% (1)
- CR AytomgneDocument13 pagesCR AytomgneMhB SaAdPas encore d'évaluation
- TP7 TSX37Document12 pagesTP7 TSX37math62210100% (2)
- TP4 Simulation Microcontroleur PICDocument6 pagesTP4 Simulation Microcontroleur PICSalah Dahouathi100% (1)
- Rap Final VHDLDocument18 pagesRap Final VHDLKanouni Oussama0% (1)
- TD4 Es DisDocument6 pagesTD4 Es DisHyba MaatougPas encore d'évaluation
- Examen API&SupervisionDocument4 pagesExamen API&SupervisionSoufien Atoui67% (3)
- TP Informatique IndustrielleDocument27 pagesTP Informatique IndustrielleAkram Ferchichi100% (2)
- TP UpDocument14 pagesTP UpJunior Yoann NzangPas encore d'évaluation
- Automatisme TPDocument5 pagesAutomatisme TPnoussaierPas encore d'évaluation
- Exos GrafcetDocument26 pagesExos GrafcetRuben Yav100% (2)
- Compte Rendu TP Automatisme IndustrielDocument3 pagesCompte Rendu TP Automatisme IndustrielMagraoui AbdelkadirPas encore d'évaluation
- TP Programmation Banc PortailDocument16 pagesTP Programmation Banc PortailsoufianePas encore d'évaluation
- TP GE ElbachaDocument18 pagesTP GE ElbachabbbPas encore d'évaluation
- Abbas Mohamed Larbi Le Management Des Competences Dune Entreprise AlgerinneDocument198 pagesAbbas Mohamed Larbi Le Management Des Competences Dune Entreprise AlgerinneHamid BouleghabPas encore d'évaluation
- CH3 Conversion de Lénergie ÉolienneDocument7 pagesCH3 Conversion de Lénergie ÉolienneSalmi Nour E'ddinePas encore d'évaluation
- Support Du Cours Fours IndustrielsDocument56 pagesSupport Du Cours Fours IndustrielsAustin C Lynch100% (1)
- ThoriedesfilsdattenteV1 Anisimov LimniosDocument16 pagesThoriedesfilsdattenteV1 Anisimov LimniosCharif MohamedPas encore d'évaluation
- La Phrase InterrogativeDocument4 pagesLa Phrase Interrogativesamirfun2006Pas encore d'évaluation
- Philip Pettit Isaiah BerlinDocument32 pagesPhilip Pettit Isaiah BerlinRoberta Soromenho NicoletePas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1Haboussi MeriemPas encore d'évaluation
- TD1 Ci1 Ro 2020 2021Document2 pagesTD1 Ci1 Ro 2020 2021nicolas100% (1)
- 1519 Problmes Conomiques Comprendre L Conomie MondialeDocument124 pages1519 Problmes Conomiques Comprendre L Conomie MondialeThomas le sage100% (1)
- BenchmarkDocument7 pagesBenchmarkSonia YameogoPas encore d'évaluation
- Fiche Maths Terminale 1Document1 pageFiche Maths Terminale 1Pierre100% (1)
- Chapitre 2Document83 pagesChapitre 2Midou MhmdPas encore d'évaluation
- Commande Vectorielle Sans Capteur Mécanique de La Machine SyDocument96 pagesCommande Vectorielle Sans Capteur Mécanique de La Machine SyAbdou Juventus100% (1)
- Uc 15 CPUDocument7 pagesUc 15 CPURayan En-NougaouiPas encore d'évaluation
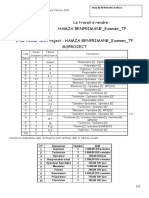
- Examen TP MS Project Février 20-21Document3 pagesExamen TP MS Project Février 20-21Hamza BN100% (1)
- Guide Technique 2013 BUSCADocument292 pagesGuide Technique 2013 BUSCAmatheuroquencourt100% (1)
- Emploi Du Temps M1 - S2 - 2021-2022Document1 pageEmploi Du Temps M1 - S2 - 2021-2022TOUBAL SEGHIR NadhirPas encore d'évaluation
- Comprehension Et Expression OraleDocument30 pagesComprehension Et Expression Oraleيوسف عسلي67% (3)
- TDN1etude D'un Reseau D'assnissement D'un Ville TouristiqueDocument6 pagesTDN1etude D'un Reseau D'assnissement D'un Ville TouristiqueSmaïl KhelifaPas encore d'évaluation
- FF Electronique m2Document7 pagesFF Electronique m2yaminoPas encore d'évaluation
- Les Fausses Confidences, Marivaux Acte I Scène 14 AnalyseDocument1 pageLes Fausses Confidences, Marivaux Acte I Scène 14 AnalyseSuper YakiwPas encore d'évaluation
- HSEDocument95 pagesHSESalissou Salha100% (1)
- IntegrationDocument71 pagesIntegrationAkpo ArmandPas encore d'évaluation
- Note de Calcul Reseau GazDocument1 pageNote de Calcul Reseau GazDjamal Mohammedi100% (1)
- Turboexpander For LNG PlantDocument9 pagesTurboexpander For LNG PlantArsa Setya DewantaPas encore d'évaluation
- Guide Explicatif - Mon Répertoire Orthographique Pour Écrire (RETZ)Document8 pagesGuide Explicatif - Mon Répertoire Orthographique Pour Écrire (RETZ)Pierre Quantin100% (1)
- Analyse Fonctionnelle BTS UniveriaDocument10 pagesAnalyse Fonctionnelle BTS UniveriaYounes AblePas encore d'évaluation
- Programme de Révisions DST n4Document2 pagesProgramme de Révisions DST n4lola21035Pas encore d'évaluation
- Esi-Cours LLC PDFDocument10 pagesEsi-Cours LLC PDFVivo Vivoo VIPas encore d'évaluation
- TD2 Variables Aleã AtoiresDocument2 pagesTD2 Variables Aleã AtoiresismailasanguesowPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- Le marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentD'EverandLe marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Le trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsD'EverandLe trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Le plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentD'EverandLe plan marketing en 4 étapes: Stratégies et étapes clés pour créer des plans de marketing qui fonctionnentPas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)