Vous aimerez peut-être aussi
- 09 Maquette Boite VitessesDocument7 pages09 Maquette Boite VitessesBrahim Achayfad100% (1)
- DVDocument7 pagesDVlachhelPas encore d'évaluation
- Poste de Chargement en GazDocument4 pagesPoste de Chargement en GazmohchouPas encore d'évaluation
- Sujet 5 Mecanisme de TransmissionDocument6 pagesSujet 5 Mecanisme de TransmissionBOUREIMA ZOGONAPas encore d'évaluation
- Exercice ReducteurDocument8 pagesExercice ReducteurGyPas encore d'évaluation
- VI - Description de La Partie Opérative: (: Baladeur Inverseur, Formée Par Le CoupleDocument8 pagesVI - Description de La Partie Opérative: (: Baladeur Inverseur, Formée Par Le Coupleedem.mejri1920Pas encore d'évaluation
- Exercices Boites de VitessesDocument7 pagesExercices Boites de VitessesAhmed YoussefPas encore d'évaluation
- Mini CompresseurDocument5 pagesMini CompresseurJawher Salem100% (1)
- TD Rev Mini Compresseur PDFDocument5 pagesTD Rev Mini Compresseur PDFHajar NhailaPas encore d'évaluation
- Dossier Technique 11Document3 pagesDossier Technique 11Mrnadhir Mecanique100% (1)
- ADM HotDocument8 pagesADM HotDJIBY HOTPas encore d'évaluation
- Contrôle Continu - Dessin Technique II - Juin 2020 - BonDocument7 pagesContrôle Continu - Dessin Technique II - Juin 2020 - BonStephane FochePas encore d'évaluation
- 16 EX5 Engrenages - Pouli CourroieDocument1 page16 EX5 Engrenages - Pouli CourroieMouhcine Ben MoussaPas encore d'évaluation
- Sujet 29 LogoDocument7 pagesSujet 29 Logohousinmechani1Pas encore d'évaluation
- Ilovepdf Merged-1Document23 pagesIlovepdf Merged-1yahyaouimohamedamine309Pas encore d'évaluation
- Tronconneuse AutomatiseeDocument2 pagesTronconneuse AutomatiseeRouaissi RidhaPas encore d'évaluation
- Leçon N°5 (Prof) Liaisons MécaniquesDocument6 pagesLeçon N°5 (Prof) Liaisons MécaniquesMariem NejimaPas encore d'évaluation
- Fonction Transmettre Transmission de Puissance Poulie Courroie ExercicesDocument9 pagesFonction Transmettre Transmission de Puissance Poulie Courroie ExercicesHamid MchachraPas encore d'évaluation
- Sujet 4 Mecanisme Dentrainement Du TapisDocument5 pagesSujet 4 Mecanisme Dentrainement Du TapisBOUREIMA ZOGONA100% (2)
- Synthèse Série N°1 Term2019-20Document4 pagesSynthèse Série N°1 Term2019-20RtmmgPas encore d'évaluation
- 3-TD1-Les EngrenagesDocument1 page3-TD1-Les EngrenagesÄhmēđ MardiouiPas encore d'évaluation
- DS Trains Épi Config - 2021+corrigé-1Document3 pagesDS Trains Épi Config - 2021+corrigé-1Dan CheridanPas encore d'évaluation
- Sujet Complet Sans A3Document6 pagesSujet Complet Sans A3MoPas encore d'évaluation
- Exercice 36Document6 pagesExercice 36Medamine HadrichPas encore d'évaluation
- Exercice-3 220616 222847Document6 pagesExercice-3 220616 222847HamzaPas encore d'évaluation
- Sujet 05 LogoDocument6 pagesSujet 05 Logohousinmechani1Pas encore d'évaluation
- Sujet 04 - LogoDocument5 pagesSujet 04 - Logohousinmechani1Pas encore d'évaluation
- DC 142022Document19 pagesDC 142022ezzinePas encore d'évaluation
- Mayerexemple BTNDocument2 pagesMayerexemple BTNlaila achahbarPas encore d'évaluation
- TMM2 GIM Sujet 3 REDUCTEUR DE ROUE DROITE DE MOISSONNEUSEDocument5 pagesTMM2 GIM Sujet 3 REDUCTEUR DE ROUE DROITE DE MOISSONNEUSEThierry BoulayPas encore d'évaluation
- Technique CDocument8 pagesTechnique Csirinebarg215Pas encore d'évaluation
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- Correction Examen Engrenages 2023Document3 pagesCorrection Examen Engrenages 2023Mouhcine OufkirPas encore d'évaluation
- I. Etude de La Partie Opérative:: 20 DentsDocument3 pagesI. Etude de La Partie Opérative:: 20 DentsGhassen WedPas encore d'évaluation
- Sujet 5 Mécanisme de Transmission CorrectionDocument6 pagesSujet 5 Mécanisme de Transmission CorrectionYahya AidaraPas encore d'évaluation
- Sujet 17 - LogoDocument6 pagesSujet 17 - Logohousinmechani1Pas encore d'évaluation
- NomenclatureDocument1 pageNomenclatureWael MaatougPas encore d'évaluation
- Dimensionnement Du Réducteu1Document9 pagesDimensionnement Du Réducteu1Layla OmariPas encore d'évaluation
- + TD Transmission 3 Etude ReducteurDocument3 pages+ TD Transmission 3 Etude ReducteurMahrez ZaafouriPas encore d'évaluation
- Exercices Engrenages eDocument2 pagesExercices Engrenages eRahma BaccarPas encore d'évaluation
- Devoir Engrenages eDocument8 pagesDevoir Engrenages esb ali100% (1)
- Mecanisme Dentrainement Dune PoulieDocument6 pagesMecanisme Dentrainement Dune PoulieAhmedPas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°2 - Technologie - 1ère AS (2012-2013) MR Abdallah RaouafiMounir Ben AouidhaPas encore d'évaluation
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Td02 Bande RouleuseDocument7 pagesTd02 Bande RouleuseWalae EloiriachiPas encore d'évaluation
- Aide À La Lecture Dun PlanDocument14 pagesAide À La Lecture Dun PlanTaoufik Ben HadidPas encore d'évaluation
- APPLICATION EngrenagesDocument1 pageAPPLICATION Engrenageslassaad hamrouniPas encore d'évaluation
- Analyse Fonctionnelle InterneDocument6 pagesAnalyse Fonctionnelle InterneZied MakkiPas encore d'évaluation
- DS3 - Dossier Technique - 3STDocument6 pagesDS3 - Dossier Technique - 3STBouabdellaoui saif ennasrPas encore d'évaluation
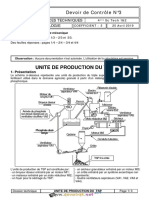
- Devoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenYasmine SolenePas encore d'évaluation
- Robot Peinture (À, Imprimer) 231024 150655Document8 pagesRobot Peinture (À, Imprimer) 231024 150655namou5836Pas encore d'évaluation
- DevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Document6 pagesDevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Rabia ZaiedPas encore d'évaluation
- Chap08 MAS PDFDocument4 pagesChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- Technique C PDFDocument8 pagesTechnique C PDFghizlen maaroufiPas encore d'évaluation
- MecaniqueDocument11 pagesMecaniqueDounia AlaouiPas encore d'évaluation
- Sujet 4 Mecanisme Dentrainement Du Tapis CorrectionDocument5 pagesSujet 4 Mecanisme Dentrainement Du Tapis CorrectionBOUREIMA ZOGONA100% (1)
- Stratégies GroupesDocument36 pagesStratégies GroupesstrideworldPas encore d'évaluation
- PPA Solutions DownloadDocument16 pagesPPA Solutions DownloadSam BroisePas encore d'évaluation
- Accessibilite Physique Animee - CanDocument7 pagesAccessibilite Physique Animee - CanZbedi ChaimaPas encore d'évaluation
- Planification D'urgenceDocument20 pagesPlanification D'urgenceABADI NAHIDPas encore d'évaluation
- BNT Is Normal 2021Document25 pagesBNT Is Normal 2021YS ConsultingPas encore d'évaluation
- CV Ferdinand KAHENGA E VDocument2 pagesCV Ferdinand KAHENGA E VAnonymous KrNlWdkzcPas encore d'évaluation
- Therm - Stockage Et Aliment. Gaz FuelDocument72 pagesTherm - Stockage Et Aliment. Gaz FuelNizarChouchenePas encore d'évaluation
- Boulonnerie Visserie CoursDocument10 pagesBoulonnerie Visserie CoursRizouga AbdallahPas encore d'évaluation
- Reglement Interieur AiehtpDocument5 pagesReglement Interieur AiehtpTaha BenPas encore d'évaluation
- Utilisation D'un Modele D'aide A La Decision Multicritere Base Sur La Methode Ahp Pour La Selection de Projets D'infrastructures SanitairesDocument21 pagesUtilisation D'un Modele D'aide A La Decision Multicritere Base Sur La Methode Ahp Pour La Selection de Projets D'infrastructures Sanitairesn.yousfiPas encore d'évaluation
- Examen Final Seer Gecsi 09 Juin 2020 v2Document3 pagesExamen Final Seer Gecsi 09 Juin 2020 v2Youness BoufsadPas encore d'évaluation
- Inf1600 Devoir 01Document3 pagesInf1600 Devoir 01Ahmed GafsiPas encore d'évaluation
- Dossier Synthese HCRDocument26 pagesDossier Synthese HCRGil GuardiaPas encore d'évaluation
- Classif CoursDocument86 pagesClassif Courskistidi33Pas encore d'évaluation
- Ex06 - Etage D'adaptationDocument6 pagesEx06 - Etage D'adaptationAissa KalachePas encore d'évaluation
- CNOM 2012 30 Juin 2013Document92 pagesCNOM 2012 30 Juin 2013micahloisvalmoriaPas encore d'évaluation
- Msyn PDFDocument34 pagesMsyn PDFbensumbbPas encore d'évaluation
- Bac-Blanc LGM - 2021Document5 pagesBac-Blanc LGM - 2021Sébastien ONDO MINKOPas encore d'évaluation
- LE CIRCUIT IMPRIME .-ConvertiDocument3 pagesLE CIRCUIT IMPRIME .-Convertiسعيد تامرPas encore d'évaluation
- Courroies Dentées ATN 1207Document8 pagesCourroies Dentées ATN 1207Claudine Elisseev100% (2)
- Amazon FRDocument1 pageAmazon FRangelisharma455Pas encore d'évaluation
- Communiquer Marjane Sapino - VFDocument2 pagesCommuniquer Marjane Sapino - VFFati FlourPas encore d'évaluation
- 796Document8 pages796Simo SimoPas encore d'évaluation
- DR - Antidemarrage Citroen Et RenaultDocument6 pagesDR - Antidemarrage Citroen Et Renaultaymendab100% (1)
- Introduction À La Notion D'ordiDocument2 pagesIntroduction À La Notion D'ordikabi6713Pas encore d'évaluation
- Script D'appel EntrantDocument2 pagesScript D'appel EntrantAudry Lucious Lyon100% (1)
- Les Abaques Multiplaz 3500Document5 pagesLes Abaques Multiplaz 3500Nacer MezghichePas encore d'évaluation
- Teufel ShopDocument1 pageTeufel ShopCaractère ExclusivePas encore d'évaluation
- These Finale Gravé Sur DisqueDocument146 pagesThese Finale Gravé Sur DisqueMarie DaguidamPas encore d'évaluation
- A ImprimerDocument14 pagesA ImprimerhsnghhPas encore d'évaluation