Vous aimerez peut-être aussi
- Synthèse Série N°1 Term2019-20Document4 pagesSynthèse Série N°1 Term2019-20RtmmgPas encore d'évaluation
- Bride À Machoire (Corrigé) PDFDocument9 pagesBride À Machoire (Corrigé) PDFNaoufel Fares67% (3)
- Leçon 2 Mise en Position Et AppareillageDocument29 pagesLeçon 2 Mise en Position Et AppareillageYasmine Hammami100% (1)
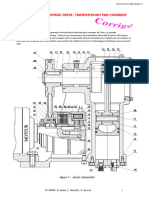
- + TD Transmission 3 Etude ReducteurDocument3 pages+ TD Transmission 3 Etude ReducteurMahrez ZaafouriPas encore d'évaluation
- Proposition de Correction Sujet 2 NdjackDocument11 pagesProposition de Correction Sujet 2 Ndjackalexandrelegrand326Pas encore d'évaluation
- CPAV-Rep-Ex1 Emb-Frein PDFDocument3 pagesCPAV-Rep-Ex1 Emb-Frein PDFoumaima ghzPas encore d'évaluation
- PressemécaniquecnepDocument4 pagesPressemécaniquecnepYousfi WahidPas encore d'évaluation
- DR 1Document4 pagesDR 1Hassine AliPas encore d'évaluation
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- Convoyeur A BandeDocument4 pagesConvoyeur A BandeKhaled GammoudiPas encore d'évaluation
- Ds1-1as-Vé Reglable en Hauteur-2022Document4 pagesDs1-1as-Vé Reglable en Hauteur-2022Saifeddine BrikiPas encore d'évaluation
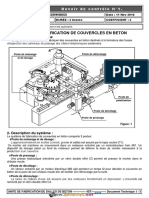
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini Noomen PDFAdil El AzzouziPas encore d'évaluation
- Fonction Transmettre Schematisation Et LiaisonsDocument10 pagesFonction Transmettre Schematisation Et LiaisonsHamami AymenPas encore d'évaluation
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- 2016 - 3ISM-Robo Indu-RattDocument5 pages2016 - 3ISM-Robo Indu-Rattcha benPas encore d'évaluation
- Museleuse BrouDocument23 pagesMuseleuse BrouRinPas encore d'évaluation
- Devoir de Synthèse n2Document5 pagesDevoir de Synthèse n2Sofien GesmiPas encore d'évaluation
- Construction Mécanique - TD Spéciaux - MkaDocument13 pagesConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- 09 Maquette Boite VitessesDocument7 pages09 Maquette Boite VitessesBrahim Achayfad100% (1)
- TD4-Batteur MélangeurDocument6 pagesTD4-Batteur MélangeurFerchichi HatemPas encore d'évaluation
- Session PricipalDocument4 pagesSession Pricipalmypc1990Pas encore d'évaluation
- Devoie de Synthese n2Document5 pagesDevoie de Synthese n2Sofien GesmiPas encore d'évaluation
- CNC Si MP 2011Document27 pagesCNC Si MP 2011salma ait aliPas encore d'évaluation
- CintreuseDocument6 pagesCintreuseAbdoPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionDocument7 pagesCS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionPierre LancelotPas encore d'évaluation
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- Chapitre 6 - Guidage en TranslationDocument13 pagesChapitre 6 - Guidage en Translationahidouri100% (3)
- Le Montage D'usinage Corrigé PDFDocument4 pagesLe Montage D'usinage Corrigé PDFD. n50% (2)
- app6-STE-STM-SMB - Destribution de Tubes - RepDocument10 pagesapp6-STE-STM-SMB - Destribution de Tubes - RepTouriya MoukhlesPas encore d'évaluation
- Devoir Deconttrole N3-1-2015Document3 pagesDevoir Deconttrole N3-1-2015Melek YaacoubiPas encore d'évaluation
- TP 25.1 Maxpid CorrigéDocument8 pagesTP 25.1 Maxpid CorrigéyasminaPas encore d'évaluation
- Technique CCCDocument15 pagesTechnique CCCNÖÚ HÄPas encore d'évaluation
- Correction Génie MécaniqueDocument9 pagesCorrection Génie MécaniqueJonisPas encore d'évaluation
- DR 1Document5 pagesDR 1Hassine AliPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- 6 Schematisation PDFDocument10 pages6 Schematisation PDFHanane TounsiPas encore d'évaluation
- Technique CDocument8 pagesTechnique Csirinebarg215Pas encore d'évaluation
- Correction DS1 Bac 2021 2022Document4 pagesCorrection DS1 Bac 2021 2022Kadri MongiPas encore d'évaluation
- Modelisation Mécanismes 2020Document22 pagesModelisation Mécanismes 2020Mathis DintrichPas encore d'évaluation
- Ch1 - Modelisation Des Liaisons-Prof Page 3-7Document8 pagesCh1 - Modelisation Des Liaisons-Prof Page 3-7Sheikh Al-shoteriPas encore d'évaluation
- Sujet 21 - LogoDocument8 pagesSujet 21 - Logohousinmechani1Pas encore d'évaluation
- EXAMEN - Janvier 2021 - Éléments de Machines - LGM2Document6 pagesEXAMEN - Janvier 2021 - Éléments de Machines - LGM2Khaled GammoudiPas encore d'évaluation
- Sujet 7 PDFDocument15 pagesSujet 7 PDFDODOHICHAMPas encore d'évaluation
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Hamza IsksiouiPas encore d'évaluation
- TP3-1 GM RI40 ProfDocument5 pagesTP3-1 GM RI40 ProfRaphael OuwenPas encore d'évaluation
- Devoir de Synthèse N°3 (Corrigé) - Technologie - 1ère AS (2008-2009)Document12 pagesDevoir de Synthèse N°3 (Corrigé) - Technologie - 1ère AS (2008-2009)أبوأحمد الجزيريPas encore d'évaluation
- Ilovepdf Merged-1Document23 pagesIlovepdf Merged-1yahyaouimohamedamine309Pas encore d'évaluation
- Devoir Engrenages eDocument8 pagesDevoir Engrenages esb ali100% (1)
- ExtraitDocument7 pagesExtraitAmine ait talebPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb Freinyassine22Pas encore d'évaluation
- Schematisation Des Systemes - SCM Et Liaison TSI1Document18 pagesSchematisation Des Systemes - SCM Et Liaison TSI1Fakhreddine NaimiPas encore d'évaluation
- Klubprepa Extrait 4747Document2 pagesKlubprepa Extrait 4747Asmaa KasmiPas encore d'évaluation
- 1 Cours Catenaire Date Inconnue FraDocument130 pages1 Cours Catenaire Date Inconnue Frasnoofsnoof100% (5)
- Developpement Dun Systeme de Production Du Biodiesel A Partir Dhuile UtiliseDocument59 pagesDeveloppement Dun Systeme de Production Du Biodiesel A Partir Dhuile UtiliseyveseonePas encore d'évaluation
- Guide Anglais 1èDocument13 pagesGuide Anglais 1èMike KeitaPas encore d'évaluation
- Croquis Quartier Batignolles ParisDocument23 pagesCroquis Quartier Batignolles ParisBruno BROCHARDPas encore d'évaluation
- Epreuve Pratique CGM Chaudronnerie 2021Document34 pagesEpreuve Pratique CGM Chaudronnerie 2021ben ayed bouraouiPas encore d'évaluation
- Chap 1Document14 pagesChap 1NoussaPas encore d'évaluation
- Tpe Seminaire Et ConferenceDocument19 pagesTpe Seminaire Et ConferenceErickPas encore d'évaluation
- 2013 - Audit EnergetiqueDocument58 pages2013 - Audit EnergetiqueMouhcine HajjoujePas encore d'évaluation
- 2020 01 15 Liste OFDocument4 pages2020 01 15 Liste OFREHAZPas encore d'évaluation
- 30ème FOIRE DE LA PRODUCTION ALGÉRIENNE - SAFEXDocument5 pages30ème FOIRE DE LA PRODUCTION ALGÉRIENNE - SAFEXnabil heddadPas encore d'évaluation
- Engin BTP Et Terrassement-1Document37 pagesEngin BTP Et Terrassement-1SamuelPas encore d'évaluation
- FT 10 Dénombrement CSRDocument2 pagesFT 10 Dénombrement CSRihab hentourPas encore d'évaluation
- 5géologie StructuraleDocument27 pages5géologie StructuraleChakib SafarPas encore d'évaluation
- 8 French Werber Bernard Le Livre Du Voyage PDFDocument83 pages8 French Werber Bernard Le Livre Du Voyage PDFmariaPas encore d'évaluation
- TDM3 Sans RéponsesDocument2 pagesTDM3 Sans RéponsesOumaima LemouyiPas encore d'évaluation
- 200 Questions Isolées en QCM-Orthopédie TraumatologieDocument222 pages200 Questions Isolées en QCM-Orthopédie TraumatologieZohra Targui67% (3)
- ZAP05 Pages SimplesDocument68 pagesZAP05 Pages SimplesFourier MakambioPas encore d'évaluation
- Exercice MRPDocument2 pagesExercice MRPMõűñã BõūãbîdPas encore d'évaluation
- Transmission Puissance 1ere Doc ÉlèveDocument5 pagesTransmission Puissance 1ere Doc ÉlèveMarouen Mekki100% (1)
- Le Renouveau Rural (Algérie - 2006)Document435 pagesLe Renouveau Rural (Algérie - 2006)cissmaroc100% (3)
- 4 InfrastructureDocument27 pages4 InfrastructureAhmed MediouniPas encore d'évaluation
- Corrigé DS01 2014 PDFDocument6 pagesCorrigé DS01 2014 PDFEssaidi AliPas encore d'évaluation
- VELLARD, Jehan - Une Civilisation Du Miel PREVIEWDocument22 pagesVELLARD, Jehan - Une Civilisation Du Miel PREVIEWResearcherPas encore d'évaluation
- ImpressionDocument17 pagesImpressionAbdelaziz AbdelazizPas encore d'évaluation
- Département de Génie Mécanique Option - Génie Des Matériaux Mémoire de Fin D Étude en Vue de L Obtention Du Diplôme de Master en Génie Des MatériauxDocument120 pagesDépartement de Génie Mécanique Option - Génie Des Matériaux Mémoire de Fin D Étude en Vue de L Obtention Du Diplôme de Master en Génie Des MatériauxmoummouPas encore d'évaluation
- Sites Potentiels en Substances Utiles (Tunis°Document112 pagesSites Potentiels en Substances Utiles (Tunis°Ons Ben Abdallah Kalai100% (1)
- SOLIDEC Plusieurs PostesDocument3 pagesSOLIDEC Plusieurs PostesIr Justin MULANGIPas encore d'évaluation
- Environnement Et Changement Climatique Au MarocDocument90 pagesEnvironnement Et Changement Climatique Au MarocHichamLahbil100% (1)
- Rapport Revue Processus Production Septembre 2023 (2) ADocument16 pagesRapport Revue Processus Production Septembre 2023 (2) AKOUAMEPas encore d'évaluation
- Devoir de Contrôle N°2 1er Semestre - Math - Bac Technique (2018-2019) MR Dkhili AhmedDocument2 pagesDevoir de Contrôle N°2 1er Semestre - Math - Bac Technique (2018-2019) MR Dkhili Ahmedkougfst ldhdPas encore d'évaluation