Vous aimerez peut-être aussi
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- Transformation affine: Libérer des perspectives visuelles : explorer la transformation affine en vision par ordinateurD'EverandTransformation affine: Libérer des perspectives visuelles : explorer la transformation affine en vision par ordinateurPas encore d'évaluation
- 002 Schema CinematiqueDocument5 pages002 Schema CinematiqueMounir Douggaz100% (1)
- Modelisation Des Liaisons-ProfDocument11 pagesModelisation Des Liaisons-ProfpaulPas encore d'évaluation
- Cours SIRIMA S5 GI GM Dessin de Construction Mécanique 2022 2023Document14 pagesCours SIRIMA S5 GI GM Dessin de Construction Mécanique 2022 2023sie Rachid TraorePas encore d'évaluation
- Cm-Modelisation Des Liaisons MecaniqueDocument11 pagesCm-Modelisation Des Liaisons MecaniqueYosso YohannPas encore d'évaluation
- 3-Liaisons Mécaniques - 3Document7 pages3-Liaisons Mécaniques - 3Alice BenkhabechechePas encore d'évaluation
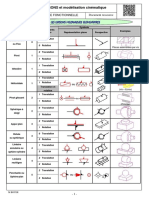
- Les Liaisons Mecaniques Elementaires: LIAISONS Et Modélisation CinématiqueDocument1 pageLes Liaisons Mecaniques Elementaires: LIAISONS Et Modélisation CinématiqueDhayou GraphyPas encore d'évaluation
- Guidage en Translation Cinématique:: FT1: FT2: FT3Document2 pagesGuidage en Translation Cinématique:: FT1: FT2: FT3SavanePas encore d'évaluation
- Liaisons Mécaniques - 2022Document2 pagesLiaisons Mécaniques - 2022Mohsen LaabidiPas encore d'évaluation
- Tableau Des Shemas MecaniquesDocument1 pageTableau Des Shemas MecaniquesntabPas encore d'évaluation
- 07-Rep SchematisationDocument10 pages07-Rep SchematisationBouHouchPas encore d'évaluation
- (FS01) Intro Aux Liaisons Meca PDFDocument3 pages(FS01) Intro Aux Liaisons Meca PDFGuy YgalPas encore d'évaluation
- 6 Schematisation PDFDocument10 pages6 Schematisation PDFHanane TounsiPas encore d'évaluation
- Transm TCTDocument9 pagesTransm TCTMohamed LarbiPas encore d'évaluation
- Chapitre 2 - Liaison Et Assemblage MécaniquesDocument11 pagesChapitre 2 - Liaison Et Assemblage MécaniquesFréjus abimbolaPas encore d'évaluation
- Les Liaisons Doc Prof 11Document9 pagesLes Liaisons Doc Prof 11brhamza39Pas encore d'évaluation
- ÉlémentDocument8 pagesÉlémentAnonymous jmFTK5TPas encore d'évaluation
- Tableau Liaisons Normalisées Etud 16 17Document5 pagesTableau Liaisons Normalisées Etud 16 17hookedekoohPas encore d'évaluation
- Cour MeDocument54 pagesCour Meyassine yazidiPas encore d'évaluation
- Liaison GlissiereDocument19 pagesLiaison GlissiereBilly BignakePas encore d'évaluation
- SchematisationDocument10 pagesSchematisationAbdelKarim dergoulPas encore d'évaluation
- TP 1 RDMDocument12 pagesTP 1 RDMK-Led SuperTramp71% (7)
- Cours Exercices TCT 1ère ST... Et 2 Ème SM-BDocument20 pagesCours Exercices TCT 1ère ST... Et 2 Ème SM-BMrnadhir MecaniquePas encore d'évaluation
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- CH 9 Schématisation Des Systèmes Mécaniques p55-60 PRDocument6 pagesCH 9 Schématisation Des Systèmes Mécaniques p55-60 PRgerard correaPas encore d'évaluation
- 12 - Modélisation Cinématique Des MécanismesDocument25 pages12 - Modélisation Cinématique Des MécanismesManal El Matmour M'hairPas encore d'évaluation
- CH11-Cours Liaisons Et Schématisation - ÉleveDocument7 pagesCH11-Cours Liaisons Et Schématisation - Élevephotomontage636Pas encore d'évaluation
- Cours-Guidage Translation (1) PolycopiéDocument12 pagesCours-Guidage Translation (1) Polycopiéfatima zahra benmeriemePas encore d'évaluation
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •Pas encore d'évaluation
- 04 Mecasystem Liaison CorrectionDocument4 pages04 Mecasystem Liaison CorrectionBadr HakimiPas encore d'évaluation
- Chap 2 Liaisons ÉlementairesDocument14 pagesChap 2 Liaisons ÉlementairesChristian TakaPas encore d'évaluation
- Guidage en Translation Et Rotation Par CoussinetDocument3 pagesGuidage en Translation Et Rotation Par Coussinetgildas assoumou allogoPas encore d'évaluation
- Cours Modelisation Des LiaisonsDocument4 pagesCours Modelisation Des LiaisonsAristide DOSSOUPas encore d'évaluation
- Mecasystem Exercice LiaisonDocument4 pagesMecasystem Exercice LiaisonhadjabamorPas encore d'évaluation
- Cours Guidage en Translation p17Document7 pagesCours Guidage en Translation p17Jesuis Content0% (1)
- Les Liaisons MécaniqueDocument12 pagesLes Liaisons Mécaniquemourad mouradPas encore d'évaluation
- Les Liaisons 2020Document1 pageLes Liaisons 2020Mohamed AbedPas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Chap4 LAISONS MECANIQUESDocument12 pagesChap4 LAISONS MECANIQUESSimplice AssemienPas encore d'évaluation
- Guidage en TranslationDocument11 pagesGuidage en TranslationMohamed Slim KHACHROUMI50% (2)
- 14 Modelisation CinematiqueDocument10 pages14 Modelisation Cinematiquemezziwalid099411Pas encore d'évaluation
- Cours Monde3D 2017 06-PipelineDocument71 pagesCours Monde3D 2017 06-PipelineimedPas encore d'évaluation
- Cinema TiqueDocument74 pagesCinema TiqueIbrahima Khalil SowPas encore d'évaluation
- Partie 1Document4 pagesPartie 1Amal Hammami Ep SghaierPas encore d'évaluation
- Liaison Pivot PDFDocument5 pagesLiaison Pivot PDFKouki NizarPas encore d'évaluation
- Resistance Des Materiaux TerminaleDocument158 pagesResistance Des Materiaux TerminaleMame Samba Dieng NdaoPas encore d'évaluation
- Chap II Isostatisme 1Document20 pagesChap II Isostatisme 1mohammed belhadj kelkalPas encore d'évaluation
- LiaisonsDocument6 pagesLiaisonsBIOS_012100% (1)
- MODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Document10 pagesMODELISATION CINEMATIQUE COURS SI PC 2018-2019 (Él.)Andreas NGASTE100% (1)
- Pièces & Formes StandardDocument4 pagesPièces & Formes StandardMAHER ماهرPas encore d'évaluation
- Operations Geometriques 2DDocument12 pagesOperations Geometriques 2DNadia DridiPas encore d'évaluation
- Ch5 Guidage en TranslationDocument14 pagesCh5 Guidage en TranslationAB lifestylePas encore d'évaluation
- Liaisons 2Document8 pagesLiaisons 2BIOS_012100% (1)
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- EXERCICE9Document8 pagesEXERCICE9akouPas encore d'évaluation
- Fonction Transmettre Schematisation Et LiaisonsDocument10 pagesFonction Transmettre Schematisation Et LiaisonsHamami AymenPas encore d'évaluation
- Transformation du radon: Dévoiler des modèles cachés dans les données visuellesD'EverandTransformation du radon: Dévoiler des modèles cachés dans les données visuellesPas encore d'évaluation
- Cours Analyse FonctionnelleDocument17 pagesCours Analyse Fonctionnellewass princePas encore d'évaluation
- Genie CivilDocument76 pagesGenie CivilakremPas encore d'évaluation
- NORME DTR Essai de PressionDocument2 pagesNORME DTR Essai de Pressionyoucef tecPas encore d'évaluation
- Hoss MocnDocument9 pagesHoss MocnHoussem MechichiPas encore d'évaluation
- Seance1 Cours Magistral Module MTU Info 2010Document29 pagesSeance1 Cours Magistral Module MTU Info 2010Yassiner El KhaldiPas encore d'évaluation
- Rapport Youssef PDFDocument17 pagesRapport Youssef PDFyoussefhero1100% (3)
- Maple PCSI3Document20 pagesMaple PCSI3Jawad MaalPas encore d'évaluation
- Devoir 3 Ann ColegeDocument2 pagesDevoir 3 Ann Colegemourafiq faysalPas encore d'évaluation
- Regime SinusoidalDocument8 pagesRegime SinusoidalEmy ABPas encore d'évaluation
- PCExpert SUPINFODocument4 pagesPCExpert SUPINFORidha AbeidiPas encore d'évaluation
- Note de Calcul Dalot 3x (4x4)Document17 pagesNote de Calcul Dalot 3x (4x4)Cheraiti AbdelmoumenePas encore d'évaluation
- Baes LegrandDocument26 pagesBaes LegrandHUGUES ADDIHPas encore d'évaluation
- Test D'habilitationDocument28 pagesTest D'habilitationMProd Ammo100% (1)
- Carrefour Home Clv526w-11 Clv526w.11 Clv526w11 NoticeDocument28 pagesCarrefour Home Clv526w-11 Clv526w.11 Clv526w11 NoticenorbertoPas encore d'évaluation
- Cat Omega Resilift 2016 FR 05 11-BajaDocument16 pagesCat Omega Resilift 2016 FR 05 11-Bajayacinealg1Pas encore d'évaluation
- Arthur Martin Machine A LaverDocument8 pagesArthur Martin Machine A LaverMustapha OSPas encore d'évaluation
- Java Swing 4Document62 pagesJava Swing 4Zizou PoissonPas encore d'évaluation
- STS Transformee en ZDocument21 pagesSTS Transformee en ZHajri MohamedPas encore d'évaluation
- Exercice Flexion Plane SimpleDocument1 pageExercice Flexion Plane Simpleabdourazg100% (1)
- Cours PE IIA2 Chapitre 1 2020Document34 pagesCours PE IIA2 Chapitre 1 2020saif amriPas encore d'évaluation
- Calcul Des ReservoirsDocument96 pagesCalcul Des ReservoirsIssam Madani50% (2)
- t2 Con Elec2015 CadreuseDocument6 pagest2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- TS Systemes Et Réseaux D - InformatiquesDocument83 pagesTS Systemes Et Réseaux D - Informatiquesaicha100% (1)
- WifiDocument11 pagesWifibadou3ati100% (1)
- TD MS FerrahDocument12 pagesTD MS FerrahImene FerrahPas encore d'évaluation
- 1398 6 FR Pac Alfea Evolution UtilisationDocument20 pages1398 6 FR Pac Alfea Evolution Utilisationjean valjeanPas encore d'évaluation
- MemoireDocument152 pagesMemoireAbdess OxoPas encore d'évaluation
- Mémoire de Fin D'Études: Université Ibn-Khaldoun de TiaretDocument119 pagesMémoire de Fin D'Études: Université Ibn-Khaldoun de TiaretMEHDI ABDOUPas encore d'évaluation
- 3 Prefs DecDocument4 pages3 Prefs DecTarhouni100% (1)