Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- MP Math2Document8 pagesMP Math2lopabaPas encore d'évaluation
- Resume 2Document10 pagesResume 2PhanaPas encore d'évaluation
- Algèbre linéaire: Les Grands Articles d'UniversalisD'EverandAlgèbre linéaire: Les Grands Articles d'UniversalisPas encore d'évaluation
- Algèbre 2 Résumé N°04Document10 pagesAlgèbre 2 Résumé N°04khalid camaroPas encore d'évaluation
- GradientDocument21 pagesGradientWalter RafaPas encore d'évaluation
- 6278c71282005ISE Eco 2022 CorrigesDocument13 pages6278c71282005ISE Eco 2022 CorrigesGuillaume KOBENANPas encore d'évaluation
- CNC MP 2016 Maths 2 EpreuveDocument5 pagesCNC MP 2016 Maths 2 EpreuvepfePas encore d'évaluation
- Concors 2016 Maroc PartieVI Tout Hyerplan Contient Une Matrice OethgonaleDocument11 pagesConcors 2016 Maroc PartieVI Tout Hyerplan Contient Une Matrice OethgonaleFakhfakh YessinePas encore d'évaluation
- CH JordanDocument22 pagesCH Jordandaniel moneyPas encore d'évaluation
- Chapitre1 Ana Num Sys Lin MatricesDocument7 pagesChapitre1 Ana Num Sys Lin MatricesAhmed RezguiPas encore d'évaluation
- D-L-3-4 Mat Rang1 - 231027 - 151837Document3 pagesD-L-3-4 Mat Rang1 - 231027 - 151837ayaelkhatem2006Pas encore d'évaluation
- Décomposition de Dunford Et Reduction de JordanDocument22 pagesDécomposition de Dunford Et Reduction de JordanMouna DahbiPas encore d'évaluation
- CNC 2021 Math-2 MPDocument4 pagesCNC 2021 Math-2 MPJoel WilliamsPas encore d'évaluation
- Chapitre1 Algebre MatricielleDocument7 pagesChapitre1 Algebre MatricielleMehdi BtrPas encore d'évaluation
- Algebre 4Document18 pagesAlgebre 4samiraPas encore d'évaluation
- 8) Optimisation de Réseaux D'antennesDocument6 pages8) Optimisation de Réseaux D'antennesLahcen LhachimiPas encore d'évaluation
- Cours ALG3Document19 pagesCours ALG3Aymane ElouadiPas encore d'évaluation
- Algebre LineaireDocument17 pagesAlgebre LineaireTokyPas encore d'évaluation
- Chap 1Document14 pagesChap 1Youssef ZghariPas encore d'évaluation
- Algèbre 2 SMPC (TD1) PDFDocument2 pagesAlgèbre 2 SMPC (TD1) PDFAdil BahriPas encore d'évaluation
- Exercices de Réduction Des Endomorphismes 1Document3 pagesExercices de Réduction Des Endomorphismes 1jotaroda12Pas encore d'évaluation
- Serie1AN1 2018-2019 CorrectionDocument13 pagesSerie1AN1 2018-2019 CorrectionSkander TmarPas encore d'évaluation
- Calcul MatricielDocument13 pagesCalcul MatricielSyryne DridiPas encore d'évaluation
- Math2B CM11 12Document7 pagesMath2B CM11 12prof zinssPas encore d'évaluation
- Devoir - Commun2014 - V3 Prépa INPDocument4 pagesDevoir - Commun2014 - V3 Prépa INPjotaroda12Pas encore d'évaluation
- Espace Vectoriel ResumeDocument5 pagesEspace Vectoriel ResumeMahieddine Saad AzzouzPas encore d'évaluation
- Cayley HamiltonDocument2 pagesCayley Hamiltonabderrahim ouberriPas encore d'évaluation
- Alge Bre 8-2 2023-2024Document6 pagesAlge Bre 8-2 2023-2024Jacques GerardinPas encore d'évaluation
- Alg' Ebre Lin Eaire Exercices: Universit e de ToulonDocument48 pagesAlg' Ebre Lin Eaire Exercices: Universit e de ToulonMohamed aminePas encore d'évaluation
- CC2 - CorrectionDocument5 pagesCC2 - Correctionrodriguez.stacy.umPas encore d'évaluation
- Exercices - Geometrie Affine 30Document1 pageExercices - Geometrie Affine 30SCRIBD CONTACT100% (1)
- DualDocument7 pagesDualElvis Djava100% (1)
- TD1, Espaces Vectoriels 2019, SMA, BOUADocument4 pagesTD1, Espaces Vectoriels 2019, SMA, BOUAlol testPas encore d'évaluation
- CNC Tsi 2016Document2 pagesCNC Tsi 2016Med RhaiouzPas encore d'évaluation
- CH DiagonDocument18 pagesCH DiagonYoussef BouazzaouiPas encore d'évaluation
- Chapitre 4 - Analyse Numérique - 2023-2024Document3 pagesChapitre 4 - Analyse Numérique - 2023-2024chihabhamaz19Pas encore d'évaluation
- FSEGDocument16 pagesFSEGHousseyni GuindoPas encore d'évaluation
- Revisions Algebre LineaireDocument53 pagesRevisions Algebre Lineairebestgaming player100% (1)
- Espaces VectorielsDocument18 pagesEspaces VectorielsAMEZIANE MOHAMEDPas encore d'évaluation
- Exo 19Document3 pagesExo 19Sajoud MohsinPas encore d'évaluation
- 1 Espace VectorielDocument0 page1 Espace VectorielĦätíìm ÉrõssîPas encore d'évaluation
- Série 1-Algèbre Linéaire 2 - IMI - 2 - 2023 - 2024Document3 pagesSérie 1-Algèbre Linéaire 2 - IMI - 2 - 2023 - 2024azizyosri6Pas encore d'évaluation
- Rapel Algebre LinéaireDocument6 pagesRapel Algebre LinéaireMr. GamePas encore d'évaluation
- Chapitre 1 Espaces Vectoriels Traiki - Cours Algèbre 22-23Document11 pagesChapitre 1 Espaces Vectoriels Traiki - Cours Algèbre 22-23maymoun jabnouniPas encore d'évaluation
- DiagonalisationDocument18 pagesDiagonalisationbouzaydzinebPas encore d'évaluation
- Chapitre 1 Espaces Vectoriels Et Applications LinaairesDocument9 pagesChapitre 1 Espaces Vectoriels Et Applications Linaairesagc3100Pas encore d'évaluation
- Chapitre IDocument14 pagesChapitre IElhoussain AitammouPas encore d'évaluation
- Serie 1 2 3 4 Algebre LineaireDocument8 pagesSerie 1 2 3 4 Algebre LineaireyumiPas encore d'évaluation
- Correct TD1Document8 pagesCorrect TD1A HouhouPas encore d'évaluation
- Devoir Libre (2023)Document3 pagesDevoir Libre (2023)elgaidimoha.204Pas encore d'évaluation
- TD3 CorrDocument13 pagesTD3 CorrLoundou ortegaPas encore d'évaluation
- M 15 RM 1 CBDocument8 pagesM 15 RM 1 CBstudPas encore d'évaluation
- Chapitre 20 Systemes-Equations-LineairesDocument4 pagesChapitre 20 Systemes-Equations-LineairesLoïc DrawnPas encore d'évaluation
- CH PlusvarDocument23 pagesCH PlusvarmathurinkopelgaPas encore d'évaluation
- CNC Maths 2 MP 2016eDocument6 pagesCNC Maths 2 MP 2016eAbdellatif Elouarrate0% (1)
- Espace VectDocument32 pagesEspace VectSalma SaadanePas encore d'évaluation
- Algebre Lineaire PDFDocument18 pagesAlgebre Lineaire PDFSat KoosPas encore d'évaluation
- 2 Espaces Vectoriels - CDocument9 pages2 Espaces Vectoriels - CDreamsPas encore d'évaluation
- Cours de L - Électromagnétisme PDFDocument38 pagesCours de L - Électromagnétisme PDFTAMIR YOUNIPas encore d'évaluation
- KH ElectromagnetismeEMRV 1112Document3 pagesKH ElectromagnetismeEMRV 1112Islamnet Islam IslamnetPas encore d'évaluation
- Projet de TunnelDocument8 pagesProjet de TunnelAbdou Diouf GadiagaPas encore d'évaluation
- TP1 Anneaux de NewtonDocument8 pagesTP1 Anneaux de NewtonbaheddinassimaPas encore d'évaluation
- Chap I-Calcul Des FondationsDocument13 pagesChap I-Calcul Des Fondationshadjer amel DehiniPas encore d'évaluation
- Chapitre 1 Thermodynamique Les BasesDocument40 pagesChapitre 1 Thermodynamique Les BasesSodick KumbaPas encore d'évaluation
- Serie Exo s1Document13 pagesSerie Exo s1neharremy2Pas encore d'évaluation
- Chapitre 3 Les MatricesDocument42 pagesChapitre 3 Les MatricesDaoud GhimiPas encore d'évaluation
- TP Plan D'expériencesDocument14 pagesTP Plan D'expériencesfsd vxxs50% (2)
- Emploi Du Temps Annuel de BOUARFAOUI Abdessamad - 2023-2024Document1 pageEmploi Du Temps Annuel de BOUARFAOUI Abdessamad - 2023-2024Labzae SofianePas encore d'évaluation
- Guide Application EC8Document63 pagesGuide Application EC8RMbtPas encore d'évaluation
- 7 Annales - Brevet - 2022 12 Nouvelle Caledonie CoDocument2 pages7 Annales - Brevet - 2022 12 Nouvelle Caledonie Codouzi nourPas encore d'évaluation
- Manuel Du Tuyauteur - FRDocument322 pagesManuel Du Tuyauteur - FRStéphane DugnoillePas encore d'évaluation
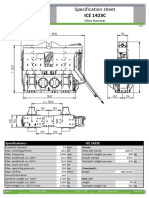
- Specification Sheet ICE 1423CDocument7 pagesSpecification Sheet ICE 1423CmelPas encore d'évaluation
- Les Organigrammes de Calcul Des ArmaturesDocument8 pagesLes Organigrammes de Calcul Des ArmaturesMAHBOUBA92Pas encore d'évaluation
- 1 AOG Rayon LumineuxDocument11 pages1 AOG Rayon LumineuxSat KoosPas encore d'évaluation
- LlectromagntismeDocument3 pagesLlectromagntismesouheil khalifaPas encore d'évaluation
- Etude SismiqueDocument18 pagesEtude SismiqueHammam AbuisneinaPas encore d'évaluation
- Devoir de Contrôle N°1 2018 2019 (MR Meddeb Tarek 1) )Document2 pagesDevoir de Contrôle N°1 2018 2019 (MR Meddeb Tarek 1) )oussama ellwezirPas encore d'évaluation
- Stock LesPdf Examens BAC Comores Sujet 2017 Comores Sujet A1 Mathematique Bac 2017Document2 pagesStock LesPdf Examens BAC Comores Sujet 2017 Comores Sujet A1 Mathematique Bac 2017Mahamoud Bacar100% (3)
- Plan D'expériences - Corrigé Fiche TD2Document10 pagesPlan D'expériences - Corrigé Fiche TD2Mohamed EL Amine100% (2)
- QCM - Pim - 2020 3Document5 pagesQCM - Pim - 2020 3Jaoui RachidPas encore d'évaluation
- Examen Partiel Du Cours BA 1 Univ-Thies 2023 PDFDocument6 pagesExamen Partiel Du Cours BA 1 Univ-Thies 2023 PDFAmar NdiayePas encore d'évaluation
- Conception Parasismique Des Ponts A Tablier MixteDocument12 pagesConception Parasismique Des Ponts A Tablier MixteNabil SaberPas encore d'évaluation
- Articles Concernant Le TipeDocument102 pagesArticles Concernant Le Tipehassnae chaibiPas encore d'évaluation
- Fiche de TD Biohp (Iffusion)Document2 pagesFiche de TD Biohp (Iffusion)Saoussen Benmohamed0% (1)
- Calculs OptiquesDocument1 pageCalculs OptiquesChristophe MinutoloPas encore d'évaluation
- Cours ACMDocument51 pagesCours ACMrhariss97100% (1)
- Troisième Rayon - Paul Le Vénitien Et Lady Rowena - Soleil de LumièreDocument6 pagesTroisième Rayon - Paul Le Vénitien Et Lady Rowena - Soleil de LumièreRoland KagboPas encore d'évaluation
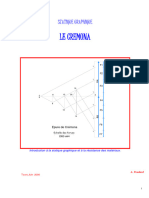
- CremonaDocument27 pagesCremonaq.morice03Pas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation