Vous aimerez peut-être aussi
- Alg 2Document33 pagesAlg 2KilgravePas encore d'évaluation
- TDN 3: Diagonalisation de Matrices Carréés Sections: 7 Et 8Document2 pagesTDN 3: Diagonalisation de Matrices Carréés Sections: 7 Et 8Owusu Ansah JacobPas encore d'évaluation
- 10-Valeurs Et Vecteurs Propres+diagonalisation - GIDocument6 pages10-Valeurs Et Vecteurs Propres+diagonalisation - GIAnouar BelabbesPas encore d'évaluation
- Mat RiceDocument5 pagesMat RiceOukssim AbdessalamPas encore d'évaluation
- Reduction Des Endomorphismes CorrigeDocument5 pagesReduction Des Endomorphismes Corrigeالضحك حتى تصبح مضحكPas encore d'évaluation
- Diagonal I SationsDocument6 pagesDiagonal I SationsAdem RessaissiPas encore d'évaluation
- Exos CorrigesDocument22 pagesExos CorrigesMohamed BenabdellahPas encore d'évaluation
- Chap2 Trigonalisation JordanisationDocument15 pagesChap2 Trigonalisation JordanisationBOUPas encore d'évaluation
- Cours Reduction Partie 1Document37 pagesCours Reduction Partie 1Hela MloukaPas encore d'évaluation
- CNC 2021 Math-2 MPDocument4 pagesCNC 2021 Math-2 MPJoel WilliamsPas encore d'évaluation
- Algebre 4Document18 pagesAlgebre 4samiraPas encore d'évaluation
- TD Algebre LineaireDocument1 pageTD Algebre Lineaireismaelsinandja343Pas encore d'évaluation
- NullDocument5 pagesNullNwilfried WiillyPas encore d'évaluation
- TD Algebre LineaireDocument1 pageTD Algebre LineaireFrederic HATTAPas encore d'évaluation
- TD - Diagonalisation Des MatricesDocument2 pagesTD - Diagonalisation Des MatricesSirinePas encore d'évaluation
- Devoir FranckDocument2 pagesDevoir Franck2002franklinnanaPas encore d'évaluation
- Corrige Math3 Cc2 Automne 2015Document7 pagesCorrige Math3 Cc2 Automne 2015OthnielPas encore d'évaluation
- Partiel - Corrige (Reduction Series)Document6 pagesPartiel - Corrige (Reduction Series)ibtihal 20Pas encore d'évaluation
- L2AL PartielDocument4 pagesL2AL PartielMomo LastarPas encore d'évaluation
- 13 - CPTEI 2A Evaluation Du 22 Mars 2019 - Réduction de Matrices - CORRIGEDocument4 pages13 - CPTEI 2A Evaluation Du 22 Mars 2019 - Réduction de Matrices - CORRIGELuse AngePas encore d'évaluation
- Math 1 Et 2Document13 pagesMath 1 Et 2oslomalumaPas encore d'évaluation
- CHP 2 - S2 - Déterminants & Sys LinéaieDocument13 pagesCHP 2 - S2 - Déterminants & Sys LinéaiemostafaaPas encore d'évaluation
- TD2 Master 2020Document9 pagesTD2 Master 2020Khalid OutawiPas encore d'évaluation
- Décomposition de Dunford Et Reduction de JordanDocument22 pagesDécomposition de Dunford Et Reduction de JordanMouna DahbiPas encore d'évaluation
- dm18 Mpsi Determinants - CirculantsDocument6 pagesdm18 Mpsi Determinants - Circulantsyoussef nigloryaPas encore d'évaluation
- Diag MatDocument8 pagesDiag Mattaher ncirPas encore d'évaluation
- Chap 7 Val Pro Aut 12Document19 pagesChap 7 Val Pro Aut 12bilal SABOHPas encore d'évaluation
- Devoir Libre GramDocument2 pagesDevoir Libre GramimadPas encore d'évaluation
- DiagonalisationDocument5 pagesDiagonalisationa.erraguibi3361Pas encore d'évaluation
- Guide Diagonalisation Matrice-2Document4 pagesGuide Diagonalisation Matrice-2KornichonPas encore d'évaluation
- Représentation Et Analyse Des Systémes LinéairesDocument13 pagesReprésentation Et Analyse Des Systémes LinéairesAissat Sid-aliPas encore d'évaluation
- Cours Analyse Numerique ENIMDocument23 pagesCours Analyse Numerique ENIMMos Ta FaPas encore d'évaluation
- TD1 Algèbre Lin 2020-21 - Enoncé - Corrigé ALGEBRE S2Document6 pagesTD1 Algèbre Lin 2020-21 - Enoncé - Corrigé ALGEBRE S2ossaaPas encore d'évaluation
- Feuille Exercices 5 Alg Lineaire CorrectionDocument5 pagesFeuille Exercices 5 Alg Lineaire CorrectionShadoPas encore d'évaluation
- Les Déterminants PDFDocument8 pagesLes Déterminants PDFHaze ThompsonPas encore d'évaluation
- CCP 2005 MP M2 CorrigeDocument6 pagesCCP 2005 MP M2 Corrigesemeh sghaierPas encore d'évaluation
- Chapitre 4Document4 pagesChapitre 4Amira MiraPas encore d'évaluation
- Chapitre1 Ana Num Sys Lin MatricesDocument7 pagesChapitre1 Ana Num Sys Lin MatricesAhmed RezguiPas encore d'évaluation
- Devoir Commun Math 4 Lycee Jacques Prevert CorrigeDocument4 pagesDevoir Commun Math 4 Lycee Jacques Prevert CorrigeSaikou Oumar BarryPas encore d'évaluation
- Cours AL-TDDocument5 pagesCours AL-TDpacifique ngantaPas encore d'évaluation
- Concours Commun Polytechniques (CCINP) 2011 MP Mathématiques 2 CBDocument4 pagesConcours Commun Polytechniques (CCINP) 2011 MP Mathématiques 2 CBmamamia9981235Pas encore d'évaluation
- Chapitre 2 - DéterminantsDocument13 pagesChapitre 2 - DéterminantsHussein Haj HassanPas encore d'évaluation
- Exam 1920 CDocument4 pagesExam 1920 Cassiaelmsaadi7Pas encore d'évaluation
- Ds 002 CorDocument7 pagesDs 002 CorWalid rabojaPas encore d'évaluation
- Chapitre2 (Matrices Et Operations)Document7 pagesChapitre2 (Matrices Et Operations)MELIE100% (1)
- Correction Feuille Revision 2Document10 pagesCorrection Feuille Revision 2Mahamat AbdramanePas encore d'évaluation
- Feuille2 MI2Document3 pagesFeuille2 MI2beyajudith48Pas encore d'évaluation
- CH JordanDocument22 pagesCH Jordandaniel moneyPas encore d'évaluation
- Fiche Technique 5 - Diagonalisation TrigonalisationDocument7 pagesFiche Technique 5 - Diagonalisation TrigonalisationBella cedric100% (2)
- Systeme LineaireDocument10 pagesSysteme LineaireMeryem SlimPas encore d'évaluation
- CCP 2011 MP m2 CorrigeDocument5 pagesCCP 2011 MP m2 CorrigeSara MarouchePas encore d'évaluation
- MT23 Chap 4 CorDocument12 pagesMT23 Chap 4 CorDouanguim LitisiaPas encore d'évaluation
- CALCUL MATRfinalDocument6 pagesCALCUL MATRfinalArij ZaidounPas encore d'évaluation
- Licence SME UE19 TD4 CorrectionDocument5 pagesLicence SME UE19 TD4 CorrectionqkdjzlzkjaPas encore d'évaluation
- Resume MatriceDocument11 pagesResume MatriceprotoPas encore d'évaluation
- Corrigé Modèle Exam Algebre (2021)Document3 pagesCorrigé Modèle Exam Algebre (2021)lightning musicPas encore d'évaluation
- Valeurs Propres Et Vecteurs Propres: Chapitre 7Document17 pagesValeurs Propres Et Vecteurs Propres: Chapitre 7Lyse NdifoPas encore d'évaluation
- Corrige Algebre Bil 2016 17 TD5Document5 pagesCorrige Algebre Bil 2016 17 TD5Ze Yann KevinePas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Chap Iii - Iv - Les Fonctions de L'entrepriseDocument125 pagesChap Iii - Iv - Les Fonctions de L'entrepriseHousseyni GuindoPas encore d'évaluation
- FSEG (Cours D'analyse Financière Chapitre 1)Document23 pagesFSEG (Cours D'analyse Financière Chapitre 1)Housseyni GuindoPas encore d'évaluation
- FSEG (Chapitre 3 Tableau Des Flux de Trésorerie Du SYSCOHADA)Document19 pagesFSEG (Chapitre 3 Tableau Des Flux de Trésorerie Du SYSCOHADA)Housseyni GuindoPas encore d'évaluation
- FSEG Comptabilité Analytique CHAPITRE 2 2022Document43 pagesFSEG Comptabilité Analytique CHAPITRE 2 2022Housseyni GuindoPas encore d'évaluation
- FSEG (Chapitre 3 Tableau Des Flux de Trésorerie Du SYSCOHADA)Document19 pagesFSEG (Chapitre 3 Tableau Des Flux de Trésorerie Du SYSCOHADA)Housseyni GuindoPas encore d'évaluation
- Chapitre 3 EOEDocument34 pagesChapitre 3 EOEHousseyni GuindoPas encore d'évaluation
- Chapitre I Definition Et Classification Des EntreprisesDocument54 pagesChapitre I Definition Et Classification Des EntreprisesHousseyni GuindoPas encore d'évaluation
- Introduction A L'econometrie-1Document41 pagesIntroduction A L'econometrie-1Housseyni Guindo100% (1)
- Module 3 Planification Operat Bokari DialloDocument156 pagesModule 3 Planification Operat Bokari DialloHousseyni GuindoPas encore d'évaluation
- 17003934943659Document17 pages17003934943659Housseyni GuindoPas encore d'évaluation
- Micro II - Le Monopole - Version ComplèteDocument38 pagesMicro II - Le Monopole - Version ComplèteThianfanga Oumar Sanogo ThianoPas encore d'évaluation
- MICRO Chap3-Concur Mono & OligopDocument46 pagesMICRO Chap3-Concur Mono & OligopThianfanga Oumar Sanogo ThianoPas encore d'évaluation
- Micro II - Les Marchés D'oligopole - Version Janv. 2020Document29 pagesMicro II - Les Marchés D'oligopole - Version Janv. 2020Housseyni GuindoPas encore d'évaluation
- TD 1 Solution 2023Document7 pagesTD 1 Solution 2023Housseyni GuindoPas encore d'évaluation
- Cours Ecris Profesionnel2023Document21 pagesCours Ecris Profesionnel2023Housseyni GuindoPas encore d'évaluation
- L'Observation Rétrospective Appliquée A L'Étude Des Migrations AfricainesDocument20 pagesL'Observation Rétrospective Appliquée A L'Étude Des Migrations AfricainesHousseyni GuindoPas encore d'évaluation
- 2008 CLF 10305Document269 pages2008 CLF 10305Housseyni GuindoPas encore d'évaluation
- Cours de Comptabilite Analytique Chapitre 3 FsegDocument35 pagesCours de Comptabilite Analytique Chapitre 3 FsegHousseyni GuindoPas encore d'évaluation
- TransactionDocument10 pagesTransactionHousseyni GuindoPas encore d'évaluation
- Comptabilité Analytique Chapitre 1 FSEG 2022Document29 pagesComptabilité Analytique Chapitre 1 FSEG 2022Housseyni GuindoPas encore d'évaluation
- Introduction DemographieDocument39 pagesIntroduction DemographieHousseyni GuindoPas encore d'évaluation
- 00-Thèse ComplèteDocument386 pages00-Thèse ComplèteAbba NamaPas encore d'évaluation
- AP Prentiss AgeDocument20 pagesAP Prentiss AgeHousseyni GuindoPas encore d'évaluation
- Comptabilité Analytique Chapitre 1 FSEG 2022Document29 pagesComptabilité Analytique Chapitre 1 FSEG 2022Housseyni GuindoPas encore d'évaluation
- Exercice 2022 AnalytiqueDocument2 pagesExercice 2022 AnalytiqueHousseyni GuindoPas encore d'évaluation
- FSEG Comptabilité Analytique CHAPITRE 2 2022Document43 pagesFSEG Comptabilité Analytique CHAPITRE 2 2022Housseyni GuindoPas encore d'évaluation
- Couts Complets Et ApplicationDocument2 pagesCouts Complets Et ApplicationHousseyni GuindoPas encore d'évaluation
- Couts Complets Et ApplicationDocument2 pagesCouts Complets Et ApplicationHousseyni GuindoPas encore d'évaluation
- Support 1Document3 pagesSupport 1Housseyni GuindoPas encore d'évaluation
- Res EauxDocument22 pagesRes EauxHousseyni GuindoPas encore d'évaluation
- Fluage Fbaguelin Jubile F. SchlosserDocument29 pagesFluage Fbaguelin Jubile F. SchlosserBenlala Aghiles AzzedinePas encore d'évaluation
- TP2 RDMDocument9 pagesTP2 RDMHanan KebahPas encore d'évaluation
- Activités Distiller Des MélangesDocument8 pagesActivités Distiller Des MélangesNouha JhiderPas encore d'évaluation
- Temps Unitaires PDFDocument6 pagesTemps Unitaires PDFFadiga Kalilou80% (20)
- Airpur 81 SawerysynDocument10 pagesAirpur 81 SawerysynrafikrafikyPas encore d'évaluation
- Système ThermodynamiqueDocument6 pagesSystème ThermodynamiqueAymene MiringuiPas encore d'évaluation
- Exerxices CapacitifDocument8 pagesExerxices CapacitifFarah OûPas encore d'évaluation
- Espaces VectorielsDocument8 pagesEspaces Vectorielsossama100% (1)
- Regressions Et Trajectoires 3DDocument34 pagesRegressions Et Trajectoires 3DJJacquelin100% (11)
- Raport de TP Matériaux de ConstructionDocument57 pagesRaport de TP Matériaux de ConstructionMaroua LahbibPas encore d'évaluation
- PenetronDocument2 pagesPenetronyoussefPas encore d'évaluation
- 2ac Hydrostatique CorrigeDocument14 pages2ac Hydrostatique CorrigeMejdi Abassi75% (4)
- Giroux Solutions 4.8Document4 pagesGiroux Solutions 4.8Yannick DsprbsPas encore d'évaluation
- Mem PFE PDFDocument95 pagesMem PFE PDFHicham BoutouchePas encore d'évaluation
- 12 - Synthese de L'aspirine CorDocument6 pages12 - Synthese de L'aspirine CorChartier Julien100% (3)
- TC 13 Serie1generalitesfonctionsDocument1 pageTC 13 Serie1generalitesfonctionsMed Amine LagrainePas encore d'évaluation
- Clefs: Les Énergies Les ÉnergiesDocument108 pagesClefs: Les Énergies Les Énergiesguglu doljno bit pohPas encore d'évaluation
- MeclibreDocument3 pagesMeclibreabdelkrim salemPas encore d'évaluation
- Ajp jp4199404C104 PDFDocument19 pagesAjp jp4199404C104 PDFPaz BalladaresPas encore d'évaluation
- 17 SpectreDocument8 pages17 SpectrelemiaPas encore d'évaluation
- M1-HU-Machines Hydr - Fiche de TP1Document8 pagesM1-HU-Machines Hydr - Fiche de TP1nonoPas encore d'évaluation
- 3 Phy ELEVE-b Propagation D'une Onde LumineuseDocument6 pages3 Phy ELEVE-b Propagation D'une Onde Lumineuseabel profPas encore d'évaluation
- Exam BCG FSTBMDocument2 pagesExam BCG FSTBMSamir Fassi FassiPas encore d'évaluation
- TD L1 S1 Biomeca 2023 StatiqueDocument40 pagesTD L1 S1 Biomeca 2023 Statiquevxcfmy2j4tPas encore d'évaluation
- TP 1Document4 pagesTP 1Sęl Må75% (4)
- Projet EtabsDocument67 pagesProjet Etabsjazmine genie74100% (9)
- SphereDocument4 pagesSphereLionel MihindouPas encore d'évaluation
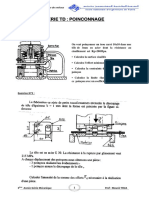
- TD PoinconnageDocument12 pagesTD Poinconnagegadri100% (4)
- CH 02 Intro Aquife 2Document31 pagesCH 02 Intro Aquife 2Abdelfattah TefatPas encore d'évaluation
- BOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFDocument96 pagesBOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFHhhh100% (2)