Vous aimerez peut-être aussi
- Jésus Christ Le Messager de La Paix Les Signes D'un Retour ImminentDocument304 pagesJésus Christ Le Messager de La Paix Les Signes D'un Retour ImminentAmin-sheikho.comPas encore d'évaluation
- 1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLI Revisé PDFDocument9 pages1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLI Revisé PDFEdward DossouPas encore d'évaluation
- Discours Politique Générale Jacques LaliéDocument12 pagesDiscours Politique Générale Jacques LaliéFrançoise Tromeur100% (3)
- Cutie de Viteze Automata OptidriverDocument15 pagesCutie de Viteze Automata Optidrivermihai_1957100% (2)
- 1978 Bollas L'esprit de L'objet Et L'épiphanie Du SacréDocument12 pages1978 Bollas L'esprit de L'objet Et L'épiphanie Du SacréKevin McInnes100% (1)
- Chimie Des Matériaux I 2021Document31 pagesChimie Des Matériaux I 2021Rhm Gaming100% (1)
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
- Moteur Essence: CaractéristiquesDocument32 pagesMoteur Essence: CaractéristiquesBruno 9449Pas encore d'évaluation
- Sous Systeme D Anti PompageDocument33 pagesSous Systeme D Anti PompageAnonymous ap1THdqd3P100% (2)
- OVF20 20reglage 20chantier 20 PDFDocument52 pagesOVF20 20reglage 20chantier 20 PDFthunder100% (4)
- Additif 1981Document40 pagesAdditif 1981setthe89% (9)
- Appui Technique m22 Accessoires de Transmission de Mouvement EsaDocument37 pagesAppui Technique m22 Accessoires de Transmission de Mouvement EsaMohssin Ben Hammou80% (5)
- Te208t SAFENDocument179 pagesTe208t SAFENCedric AndrePas encore d'évaluation
- Rapport BureauDocument39 pagesRapport BureauAbdou AarabPas encore d'évaluation
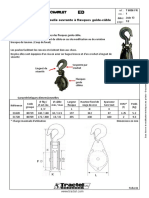
- Poulies Pour CablesDocument17 pagesPoulies Pour CablesSulfamidePas encore d'évaluation
- C Easy12 FRDocument6 pagesC Easy12 FRFaé Seaté GenevoixPas encore d'évaluation
- FR - COLTRAX CX10 CompressyDocument6 pagesFR - COLTRAX CX10 CompressyRafael Ribeiro LandmachineryPas encore d'évaluation
- Projet BateauDocument29 pagesProjet Bateauhavoc2012Pas encore d'évaluation
- Fiche Technique Groupe IncendieDocument15 pagesFiche Technique Groupe Incendieabdeldjalil.bendalibrahamPas encore d'évaluation
- SN3E100-315-E-GR-TB-SS (Pour Moteur Diesel)Document3 pagesSN3E100-315-E-GR-TB-SS (Pour Moteur Diesel)hossamPas encore d'évaluation
- Grundfosliterature 1109669Document20 pagesGrundfosliterature 1109669Youssef ZOUHAREPas encore d'évaluation
- Exercice D 3Document5 pagesExercice D 3Möhćîńé LāmīņēPas encore d'évaluation
- Datasheet SRS50-HEA0-K21 1037083 FRDocument6 pagesDatasheet SRS50-HEA0-K21 1037083 FRsidi “Sidid” dialloPas encore d'évaluation
- Manuel SeakeeperDocument38 pagesManuel SeakeepercontactPas encore d'évaluation
- VR7887 U508218 Maint FR Rev4Document18 pagesVR7887 U508218 Maint FR Rev4Aliou SouanePas encore d'évaluation
- Corrige U11-1Document9 pagesCorrige U11-1Romain MPas encore d'évaluation
- Unité Murale VRV ProclimDocument4 pagesUnité Murale VRV ProclimTarik AmiPas encore d'évaluation
- AYERBE-GROUPE-SOUDAGE-AY350-DCM dm3Document3 pagesAYERBE-GROUPE-SOUDAGE-AY350-DCM dm3wassimPas encore d'évaluation
- FR - Coltrax CX12 FRDocument2 pagesFR - Coltrax CX12 FRRafael Ribeiro LandmachineryPas encore d'évaluation
- Electro FreinDocument2 pagesElectro FreinBeely ZinePas encore d'évaluation
- EP1A C1caen2000Document9 pagesEP1A C1caen2000Badr AngeliquePas encore d'évaluation
- MANUAL KDE12000 Frances PDFDocument36 pagesMANUAL KDE12000 Frances PDFBilal HaidarPas encore d'évaluation
- Relais BuchholzDocument5 pagesRelais BuchholzBBOY FORVRPas encore d'évaluation
- LB2-Q733-0Y-2T: Fiche TechniqueDocument5 pagesLB2-Q733-0Y-2T: Fiche TechniqueAmir AmiroPas encore d'évaluation
- Presentation Lualaba Doing Business Juin 2017 Prof. KatondDocument20 pagesPresentation Lualaba Doing Business Juin 2017 Prof. KatondEgide Ilunga MpianaPas encore d'évaluation
- FR - Coltrax CX14 FRDocument2 pagesFR - Coltrax CX14 FRRafael Ribeiro LandmachineryPas encore d'évaluation
- 3YM20Document4 pages3YM20jeanpaul CAYTANPas encore d'évaluation
- Caracteristiques 2CV 1985-1990Document9 pagesCaracteristiques 2CV 1985-1990Jan MaňasPas encore d'évaluation
- CG 2004 CorrigeDocument29 pagesCG 2004 CorrigelokoPas encore d'évaluation
- 04 Dae TechniqueDocument25 pages04 Dae TechniqueHassan AbaPas encore d'évaluation
- TI80-15kW Manuel FrançaisDocument2 pagesTI80-15kW Manuel FrançaisCRIAUDPas encore d'évaluation
- AD / AT 720T38 TH Tracteur 6x4: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2Document2 pagesAD / AT 720T38 TH Tracteur 6x4: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2Mourad OthmanPas encore d'évaluation
- STAD PN25 FR LowDocument8 pagesSTAD PN25 FR LowThomas Bourdois RissePas encore d'évaluation
- Manuel-DinstructionsDocument32 pagesManuel-DinstructionsRivo RoberalimananaPas encore d'évaluation
- Exo Ventilo 2022-2023Document20 pagesExo Ventilo 2022-2023andygely55100Pas encore d'évaluation
- Compresseur CE 93Document2 pagesCompresseur CE 93Abdou HassounPas encore d'évaluation
- C10TE1D FRDocument3 pagesC10TE1D FRCliquetPas encore d'évaluation
- Note 1Document4 pagesNote 1serge RinaudoPas encore d'évaluation
- Manex A Ed 02 Rev 31 Jan 24 - Tr31-1Document947 pagesManex A Ed 02 Rev 31 Jan 24 - Tr31-1Abderrahim BouceminaPas encore d'évaluation
- Nouveau !: ProvisoireDocument16 pagesNouveau !: Provisoiretarek bourebaiaPas encore d'évaluation
- Démarrage Rapide ATV900Document4 pagesDémarrage Rapide ATV900ToussaintPas encore d'évaluation
- 8270Document8 pages8270Naro ZerosevenPas encore d'évaluation
- DEVISDocument3 pagesDEVISBen DynacPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- WN01 Donnee SM200 - 40E-20Document3 pagesWN01 Donnee SM200 - 40E-20Emin HilaliPas encore d'évaluation
- Dossier Technique CorduseDocument6 pagesDossier Technique CorduseAumaderhPas encore d'évaluation
- LB2-D416-0Y-2M: Fiche TechniqueDocument5 pagesLB2-D416-0Y-2M: Fiche TechniqueAmir AmiroPas encore d'évaluation
- AD / AT 400T42 TH Tracteur 4x2: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2Document2 pagesAD / AT 400T42 TH Tracteur 4x2: MASSES (KG.) P.T.C. P.T.R. Essieu 1 Essieu 2Mourad OthmanPas encore d'évaluation
- Lot 3 - Rebobinage de L'induit Des MT DH-350Document4 pagesLot 3 - Rebobinage de L'induit Des MT DH-350anas elhaddadPas encore d'évaluation
- CM - 15-3Document17 pagesCM - 15-3Koami dogbeda hoeganPas encore d'évaluation
- Manual - Corredizo Evo 2000 - Cardin - 143Document20 pagesManual - Corredizo Evo 2000 - Cardin - 143JOSE MENDOZAPas encore d'évaluation
- T7H 430 45 TonDocument2 pagesT7H 430 45 Tonrolando lazo patiñoPas encore d'évaluation
- Catalogue UnelventDocument6 pagesCatalogue UnelventMaison EnergyPas encore d'évaluation
- Fiche Technique SILEN S2Document1 pageFiche Technique SILEN S2Lc CzPas encore d'évaluation
- Autumn Waves Poncho Plus Size Evergreen FRDocument9 pagesAutumn Waves Poncho Plus Size Evergreen FRKlaräPas encore d'évaluation
- RCI BEPC 2016 Zone3 OrthographeDocument1 pageRCI BEPC 2016 Zone3 OrthographeDiabel DiopPas encore d'évaluation
- MKG TerrDocument144 pagesMKG TerrMohammed BahjaPas encore d'évaluation
- La Traduction Des Proverbes Du Roumain en FrançaisDocument3 pagesLa Traduction Des Proverbes Du Roumain en FrançaisNicusor CondreaPas encore d'évaluation
- IntroductionDocument4 pagesIntroductionMohammed ChaouqiPas encore d'évaluation
- Sena, La Nouvelle Terrasse Avec Vue Sur L'île ST Louis Pizzas, Spritzeria, Rooftop Et Pop Up StoreDocument1 pageSena, La Nouvelle Terrasse Avec Vue Sur L'île ST Louis Pizzas, Spritzeria, Rooftop Et Pop Up Storenina SogePas encore d'évaluation
- Le Dictionnaire Electronique Des Mots ComposesDocument15 pagesLe Dictionnaire Electronique Des Mots ComposesQuốc KhánhPas encore d'évaluation
- Energie Eolienne ELIADocument3 pagesEnergie Eolienne ELIAfaridPas encore d'évaluation
- L'Abyssinie Et Son Apôtre Ou Vie de MGR Justin de Jacobis, Vicaire Apostolique D'abyssinie (Ethiopie)Document469 pagesL'Abyssinie Et Son Apôtre Ou Vie de MGR Justin de Jacobis, Vicaire Apostolique D'abyssinie (Ethiopie)vbeziauPas encore d'évaluation
- DownloadDocument39 pagesDownloademanePas encore d'évaluation
- 9 CLASSE DE Tle C-1Document103 pages9 CLASSE DE Tle C-1Njiasse MaazouPas encore d'évaluation
- Sujet Et Corrigé Classes SocialesDocument7 pagesSujet Et Corrigé Classes Socialesmathleboss0Pas encore d'évaluation
- Félix Ravaisson - Article Du Dictionnaire Pédagogique de Ferdinand Buisson PDFDocument3 pagesFélix Ravaisson - Article Du Dictionnaire Pédagogique de Ferdinand Buisson PDFCaroline SolievnaPas encore d'évaluation
- Algeriens BerberesDocument87 pagesAlgeriens BerberesjamilPas encore d'évaluation
- GF1C2 v2 PDF A4Document78 pagesGF1C2 v2 PDF A4LeïlaPas encore d'évaluation
- Guide Perfectionnement TiDocument16 pagesGuide Perfectionnement Tijbeli jbeliPas encore d'évaluation
- Presentation Specialite SVTDocument13 pagesPresentation Specialite SVTRosh VDMPas encore d'évaluation
- Mission Indigo 5e - C01 - Diaporama ActiviteDocument18 pagesMission Indigo 5e - C01 - Diaporama ActiviteHéloïsePas encore d'évaluation
- Plan de Delimitation: Republique Du CongoDocument1 pagePlan de Delimitation: Republique Du CongoNeige EKANGUIPas encore d'évaluation
- Capital HumainDocument23 pagesCapital HumainmohamedPas encore d'évaluation
- Esaa J1M PDFDocument69 pagesEsaa J1M PDFSamir LarbiPas encore d'évaluation
- Chapitre1 (Etudiants)Document79 pagesChapitre1 (Etudiants)ABDELALI SASSIOUIPas encore d'évaluation
- Schematique Din 2Document48 pagesSchematique Din 2MecMilo ḆọɤkảPas encore d'évaluation
- Les Aigles V3-ArmeesDocument71 pagesLes Aigles V3-Armeeskamenski0% (1)
- TS807 Page 12Document14 pagesTS807 Page 12Soufyane OuhammiPas encore d'évaluation