Vous aimerez peut-être aussi
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Cours OPC PDFDocument36 pagesCours OPC PDFAdyX20% (1)
- Profinet Profibus PDFDocument40 pagesProfinet Profibus PDFSamar KacemPas encore d'évaluation
- Chapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCDocument22 pagesChapitre 03 Description Des API Et Les Logiciels STEP7 Et WINCCMohammed Amdjed DjebliPas encore d'évaluation
- Communication ModbusDocument16 pagesCommunication ModbusNabil Annaba100% (1)
- Communication Industrielle 2022Document173 pagesCommunication Industrielle 2022Addam Fatima zahra100% (1)
- Asservissemnt de NiveauDocument27 pagesAsservissemnt de NiveauYassine ChentoufPas encore d'évaluation
- ProfibusDocument21 pagesProfibussid ali saidjPas encore d'évaluation
- Compte-Rendu Rli:: Université de Bordj Bou ArreridjDocument7 pagesCompte-Rendu Rli:: Université de Bordj Bou ArreridjAbdou RokyPas encore d'évaluation
- LabVIEW - TP A1 - 2007Document55 pagesLabVIEW - TP A1 - 2007thientuyettinhPas encore d'évaluation
- Cours 1 IntroductionSPDocument11 pagesCours 1 IntroductionSPMusta PhaPas encore d'évaluation
- Document TP Industrie4 - 2023 - VFDocument18 pagesDocument TP Industrie4 - 2023 - VFZineb LamraniPas encore d'évaluation
- Cours API & SupervisionDocument155 pagesCours API & SupervisionMos TachePas encore d'évaluation
- Regulationautomatique PDFDocument59 pagesRegulationautomatique PDFعبد الحميد100% (1)
- Demarrage Unity ProDocument62 pagesDemarrage Unity ProBob MoutonPas encore d'évaluation
- Lonworks ProtocolDocument11 pagesLonworks ProtocolAnnwvyn100% (1)
- PolyTech Tour Poly1 PDFDocument59 pagesPolyTech Tour Poly1 PDFChafik BouguezourPas encore d'évaluation
- Mini Projet Supervision G5Document11 pagesMini Projet Supervision G5Med ElkotbiPas encore d'évaluation
- Supervision IndustrielleDocument39 pagesSupervision IndustrielleHerisoa RojompitiavanaPas encore d'évaluation
- TD - Réseaux Intelligents Et Réseaux IndustrielsDocument4 pagesTD - Réseaux Intelligents Et Réseaux IndustrielsOrnella Mayo100% (1)
- Introduction RDPDocument20 pagesIntroduction RDPWassim Sn100% (1)
- Identification Des Procédés Industriels ELFADILIDocument13 pagesIdentification Des Procédés Industriels ELFADILIrajaa latifiPas encore d'évaluation
- Atelier Réseaux LocauxDocument23 pagesAtelier Réseaux LocauxMohamed Hedi GmidenPas encore d'évaluation
- RCI. Réseaux Et Communication Industrielle. TD N 1Document87 pagesRCI. Réseaux Et Communication Industrielle. TD N 1Sara Ibn El AhrachePas encore d'évaluation
- Résumé Cours Réseaux Et Bus IndustrielsDocument15 pagesRésumé Cours Réseaux Et Bus IndustrielsRayan AtmaniPas encore d'évaluation
- TP - Régulation Du Niveau D'eau Dans Un RéservoirDocument8 pagesTP - Régulation Du Niveau D'eau Dans Un RéservoirAmine MoustagirPas encore d'évaluation
- Introduction Sur Les Systèmes MécatroniquesDocument20 pagesIntroduction Sur Les Systèmes MécatroniquesAnas AsranPas encore d'évaluation
- Chapitre 1 Supervision IndustrielleDocument6 pagesChapitre 1 Supervision IndustrielleJunior IssonguiPas encore d'évaluation
- TP 3 RNDocument2 pagesTP 3 RNIlyes KhelifiPas encore d'évaluation
- Bus de Communication Et Réseaux Industriels: Chapitre 2: AS-i Actuator & Sensor InterfaceDocument22 pagesBus de Communication Et Réseaux Industriels: Chapitre 2: AS-i Actuator & Sensor InterfaceZeghdoud raounekPas encore d'évaluation
- tp1 SystemcDocument3 pagestp1 SystemcAdil AbouelhassanPas encore d'évaluation
- Réseaux de Petri: TD2 !: 4.2.13. Exemples DiversDocument2 pagesRéseaux de Petri: TD2 !: 4.2.13. Exemples DiversLlouis Physics0% (1)
- Cours Complet de SurveillanceDocument57 pagesCours Complet de Surveillancemajdoub67% (3)
- Les Bus de Terrain ENSAMDocument101 pagesLes Bus de Terrain ENSAMnawramiPas encore d'évaluation
- Projets Matlab & Microcontrôleur #8 - Machine de Tri Automatique Par CouleursDocument16 pagesProjets Matlab & Microcontrôleur #8 - Machine de Tri Automatique Par CouleursJean Claude KonanPas encore d'évaluation
- TD 1: Méthode SADT Exercice 1: Etude D'un Silo PortuaireDocument7 pagesTD 1: Méthode SADT Exercice 1: Etude D'un Silo PortuaireNouha Mnassri100% (1)
- CFL02 - Introduction À L'automatisme Sous FluidSIM - Pilotage Des Stations MPSDocument12 pagesCFL02 - Introduction À L'automatisme Sous FluidSIM - Pilotage Des Stations MPSYassine AzougaghPas encore d'évaluation
- Test QCM Sur Le Bus de Terrain ProfibusDocument7 pagesTest QCM Sur Le Bus de Terrain ProfibusAngèle BoudaPas encore d'évaluation
- Chapitre 3 Les Reseaux de TerrainDocument26 pagesChapitre 3 Les Reseaux de TerrainLéandre Ettekri NDRIPas encore d'évaluation
- Devoir LibreDocument3 pagesDevoir LibreAbdessadek Elbachiri100% (1)
- LabVIEW - S3 Pilotage Instruments PDFDocument35 pagesLabVIEW - S3 Pilotage Instruments PDFVincent QuélardPas encore d'évaluation
- Mini Projet - AUTO-maalej PDFDocument8 pagesMini Projet - AUTO-maalej PDFSarah SfaxiPas encore d'évaluation
- TPN2Document2 pagesTPN2Selmane SaoudPas encore d'évaluation
- GE-S2-M8.1-Automatismes Logiques Industriels-CRS-El HammoumiDocument17 pagesGE-S2-M8.1-Automatismes Logiques Industriels-CRS-El HammoumiElkhalil Ounarhi100% (1)
- Cours Rli Partie 2Document159 pagesCours Rli Partie 2Abderrahim ErragragyPas encore d'évaluation
- Supervision RésuméDocument8 pagesSupervision Résuméwided WafiPas encore d'évaluation
- Examen DCS M1-RAF-2021Document2 pagesExamen DCS M1-RAF-2021Wă ÎłPas encore d'évaluation
- Supervision - 01 Version 2.6 2019 PDFDocument45 pagesSupervision - 01 Version 2.6 2019 PDFYassine NailiPas encore d'évaluation
- Systeme Hydraulique A Trois Bacs - 3Document2 pagesSysteme Hydraulique A Trois Bacs - 3أبو كعب علاء الدينPas encore d'évaluation
- Modbus 2019Document45 pagesModbus 2019AZwaPas encore d'évaluation
- Supervision Master2018Document115 pagesSupervision Master2018Fatima zahra RaissouniPas encore d'évaluation
- TP Api111Document9 pagesTP Api111Tarik BouchalaPas encore d'évaluation
- Cours TP Bus de Terrain v1 - 1Document38 pagesCours TP Bus de Terrain v1 - 1marwanPas encore d'évaluation
- Ch1 Introduction Aux Systemes EmbarquesDocument18 pagesCh1 Introduction Aux Systemes EmbarquesImene DjariPas encore d'évaluation
- Document1TPautoTS22012 PDFDocument42 pagesDocument1TPautoTS22012 PDFfadacenglinPas encore d'évaluation
- s71500 Communication Function Manual FR-FR FR-FRDocument370 pagess71500 Communication Function Manual FR-FR FR-FRadamsPas encore d'évaluation
- 2 Auto Automatique Et SystèmeDocument56 pages2 Auto Automatique Et SystèmeHmz OussamaPas encore d'évaluation
- RDP PDFDocument66 pagesRDP PDFElgoHouda100% (1)
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Henry MintzbergDocument31 pagesHenry MintzbergAness Oricha100% (1)
- Grille de DonnéesDocument11 pagesGrille de DonnéesAness OrichaPas encore d'évaluation
- Présentation de System ExpertDocument30 pagesPrésentation de System ExpertAness OrichaPas encore d'évaluation
- Réseaux de Pétri Coloré & Tomporel (Des Exemples)Document26 pagesRéseaux de Pétri Coloré & Tomporel (Des Exemples)Aness Oricha0% (1)
- Résistance Des Matériaux Appliquée Aux Organes de Machines: Serge LAROZEDocument62 pagesRésistance Des Matériaux Appliquée Aux Organes de Machines: Serge LAROZEYoucef Br'sPas encore d'évaluation
- Exercices Calcul IntegralDocument33 pagesExercices Calcul IntegralShadoPas encore d'évaluation
- Giovanni Levi Les Usages de La BiographiDocument13 pagesGiovanni Levi Les Usages de La BiographicristianvasquezsaavedraPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiDocument3 pagesDevoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiTarek MezghanniPas encore d'évaluation
- TD AsynchroneDocument2 pagesTD AsynchroneSoufiane ElganiPas encore d'évaluation
- Mathématiques Appliquées À La GestionDocument29 pagesMathématiques Appliquées À La Gestionrakax789Pas encore d'évaluation
- CorrectionTD2 3ème PartieDocument3 pagesCorrectionTD2 3ème PartieYassin Si OmgharPas encore d'évaluation
- Cours Electromagnetisme DjelouahDocument94 pagesCours Electromagnetisme DjelouahSy Mohammed Mnaouer100% (1)
- TD Groupes PDFDocument12 pagesTD Groupes PDFsoutien1040% (1)
- DM 3 SC ExDocument3 pagesDM 3 SC ExAmina El bourmakiPas encore d'évaluation
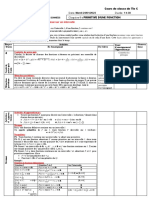
- 2bac Continuité D'une FonctionDocument26 pages2bac Continuité D'une FonctionLEILA LOURDIPas encore d'évaluation
- Cours de Mecanique Analytique PDFDocument99 pagesCours de Mecanique Analytique PDFAliOuchar100% (1)
- ProduitsAVI June09Document73 pagesProduitsAVI June09guy_fauquembergue3827Pas encore d'évaluation
- SAM Transformee de LaplaceDocument17 pagesSAM Transformee de Laplacejules.michauxPas encore d'évaluation
- TF06 Transitoire 06Document2 pagesTF06 Transitoire 06Dahou MariaPas encore d'évaluation
- Abrege Dhistoire Des MathsDocument7 pagesAbrege Dhistoire Des MathsRamzi MehamdiPas encore d'évaluation
- Ligne de Transmission 1Document12 pagesLigne de Transmission 1Ismail MarhichiPas encore d'évaluation
- Fiche Methode 12 Series EntieresDocument2 pagesFiche Methode 12 Series Entieresmd00730065Pas encore d'évaluation
- EvaporationDocument3 pagesEvaporationibtissam mikhyarPas encore d'évaluation
- DM OptiqueDocument3 pagesDM OptiqueFatima BelallamPas encore d'évaluation
- Caractristique de Transistor MosDocument7 pagesCaractristique de Transistor Moschebli abdelghafourPas encore d'évaluation
- EMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDDocument8 pagesEMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDsi salem tassaditPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Hamrouni100% (1)
- La 2379Document3 pagesLa 2379Walid Ben AmirPas encore d'évaluation
- Dyn FL CDocument32 pagesDyn FL CChourouk MeskiniPas encore d'évaluation
- Cinematique Du Solide PDFDocument60 pagesCinematique Du Solide PDFSameh Oussama100% (5)
- Fiche Vibrations Et Ondes M1Document3 pagesFiche Vibrations Et Ondes M1Yassine RékardPas encore d'évaluation
- Acoustique Technique 64Document65 pagesAcoustique Technique 64totorino38Pas encore d'évaluation
- Primitive Lecon1Document3 pagesPrimitive Lecon1FOPA GILDASPas encore d'évaluation
- Cour Cine 2020-2021 Final-1Document79 pagesCour Cine 2020-2021 Final-1Salah InePas encore d'évaluation