Vous aimerez peut-être aussi
- TD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airDocument99 pagesTD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airCHOKRI Atef100% (1)
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Document6 pages3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- EngrenageDocument33 pagesEngrenagechaouch.najehPas encore d'évaluation
- TD EmbDocument5 pagesTD EmbFARES Naoufel100% (1)
- Variateur A CourroieDocument9 pagesVariateur A CourroieSaber Hamdi100% (1)
- PalanDocument7 pagesPalanYounes Benjelloun100% (1)
- CH3-Programmation PGP PDFDocument10 pagesCH3-Programmation PGP PDFahla77100% (1)
- Ds 2 15-16Document4 pagesDs 2 15-16Otman Oto100% (1)
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZIPas encore d'évaluation
- TP1 Galet EnrouleurDocument3 pagesTP1 Galet EnrouleurguichardPas encore d'évaluation
- 3-Patinette Electrique PDFDocument4 pages3-Patinette Electrique PDFAhmed AbenPas encore d'évaluation
- Evaluation - Ajustements - Vrin Bosch - LvesDocument6 pagesEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- A25 TP Scie Sauteuse - Doc Eleve A Completer - Les CoupesDocument6 pagesA25 TP Scie Sauteuse - Doc Eleve A Completer - Les CoupesStef Tfh100% (1)
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- TARIERE ELECTRIQUE: Analyse FonctionnelleDocument34 pagesTARIERE ELECTRIQUE: Analyse FonctionnellengouoPas encore d'évaluation
- Sujet-Janvier 2019 - Machine D'essai Mécanique PDFDocument20 pagesSujet-Janvier 2019 - Machine D'essai Mécanique PDFMrnadhir MecaniquePas encore d'évaluation
- Les Embrayages1Document14 pagesLes Embrayages1Ghayth BouzayaniPas encore d'évaluation
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19Pas encore d'évaluation
- Recueil Travaux Dirigés Tech Const PDFDocument62 pagesRecueil Travaux Dirigés Tech Const PDFWafa Raboudi100% (6)
- Boite Vitesse Mini Projet (Imad)Document16 pagesBoite Vitesse Mini Projet (Imad)Houari Haouche60% (5)
- Schrader PDFDocument8 pagesSchrader PDFPierre-Eric AllierPas encore d'évaluation
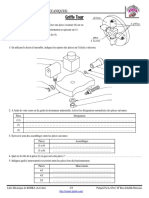
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAdramé AdraméPas encore d'évaluation
- TD Verin Simple Effet eDocument5 pagesTD Verin Simple Effet eBenmeddour Omar100% (1)
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Perceuse Sidre AmdecDocument22 pagesPerceuse Sidre Amdecpacom zanguéPas encore d'évaluation
- TD Conception2 - RévisionDocument6 pagesTD Conception2 - RévisionBokou KhalfaPas encore d'évaluation
- Gamme D'usinageDocument4 pagesGamme D'usinagesinchicovichPas encore d'évaluation
- Construction Mecanique Chapitre 5 LSLL - Guediawaye Classe M. Dieng Année Scolaire Page 1/3Document3 pagesConstruction Mecanique Chapitre 5 LSLL - Guediawaye Classe M. Dieng Année Scolaire Page 1/3Penda Niass100% (1)
- 04 Cours VisDocument1 page04 Cours VisFranck Jordan NOZAKAP FOSSI100% (1)
- DS1 Scie Sauteuse 2010 PDFDocument4 pagesDS1 Scie Sauteuse 2010 PDFSimo StitPas encore d'évaluation
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- Exercice Ajustements eDocument3 pagesExercice Ajustements eMohsen SaidiPas encore d'évaluation
- TRAVAUX DIRIGES 3 - Master Pro MMIDocument4 pagesTRAVAUX DIRIGES 3 - Master Pro MMIKhaled Gammoudi100% (1)
- TP4-1 Tutoriel Etau AjusteurDocument16 pagesTP4-1 Tutoriel Etau AjusteurMouss Tachegacht100% (2)
- Calcul Roue Vis Sans FinDocument9 pagesCalcul Roue Vis Sans FinNicole ShanaPas encore d'évaluation
- TD SUPPORT eDocument5 pagesTD SUPPORT emasteratsiiPas encore d'évaluation
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- AccouplementDocument32 pagesAccouplementTimo ShmittPas encore d'évaluation
- Cotation Fonctionnelle 2020Document6 pagesCotation Fonctionnelle 2020Mohsen LaabidiPas encore d'évaluation
- 3 DS2 - DT 2020 - 2021Document5 pages3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- TD CompresseurDocument7 pagesTD CompresseurNaoufel FaresPas encore d'évaluation
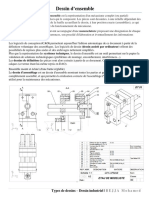
- Dessin D'ensembleDocument1 pageDessin D'ensembleMohamedBejjaPas encore d'évaluation
- Correction-Devoir de Synthese N2-Voiture Pour enfants-2016-2TIDocument4 pagesCorrection-Devoir de Synthese N2-Voiture Pour enfants-2016-2TInassirPas encore d'évaluation
- TP - TambMot Concep Complet A4Document2 pagesTP - TambMot Concep Complet A4Tagne yvanPas encore d'évaluation
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiPas encore d'évaluation
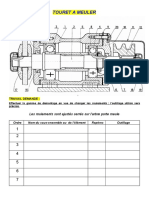
- Exercice TOURET A MEULERDocument2 pagesExercice TOURET A MEULERMama Samba SALLPas encore d'évaluation
- Exercice RDM TractionDocument4 pagesExercice RDM Tractionntayoub100% (3)
- Tpe EmbrayageDocument24 pagesTpe EmbrayageGuillaume WoukouoPas encore d'évaluation
- (Tec) (CO) Transmission de PuissanceDocument18 pages(Tec) (CO) Transmission de PuissanceousmanePas encore d'évaluation
- Exercices CotationDocument3 pagesExercices CotationMohamedBejja100% (1)
- Etude TC 2016 SUJET 21 11 2013Document14 pagesEtude TC 2016 SUJET 21 11 2013Ben Aissa ChokriPas encore d'évaluation
- Boite VitesseDocument16 pagesBoite Vitesserabie_zitoun80% (5)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- 8-TP Regime TransitoireDocument10 pages8-TP Regime TransitoireTarak BenslimanePas encore d'évaluation
- TD13Document6 pagesTD13saadoniPas encore d'évaluation
- Balduini Sequence Cme7 1Document4 pagesBalduini Sequence Cme7 1MohamedHammoudenePas encore d'évaluation
- Asservissement de Niveau - À Vanne Motorisée - Bouzekri ADocument31 pagesAsservissement de Niveau - À Vanne Motorisée - Bouzekri AJaouad Diouri50% (2)
- TP1 C03Document15 pagesTP1 C03ToufikJalalEddinePas encore d'évaluation
- Physique 2022Document9 pagesPhysique 2022mathias GENINPas encore d'évaluation
- Courschimietheorique M1Document103 pagesCourschimietheorique M1zgazgaPas encore d'évaluation
- Chapitre17 - Forces CentralesDocument6 pagesChapitre17 - Forces CentralesYahya SahelPas encore d'évaluation
- 1 Boucles de Regulation PDFDocument24 pages1 Boucles de Regulation PDFAhmed yacine kadriPas encore d'évaluation
- VZPX Model Operation Manual FTKK FTXK CP CompressedDocument22 pagesVZPX Model Operation Manual FTKK FTXK CP CompressedJUDITH CASILLASPas encore d'évaluation
- M14-Connaissance de La Mécanique Appliquée BAEL BTP-TSCTDocument109 pagesM14-Connaissance de La Mécanique Appliquée BAEL BTP-TSCTBoucharebKarim100% (1)
- Exercice 1Document4 pagesExercice 1Omar GhPas encore d'évaluation
- Serie Dexercices N8 Lycee Pilote - Physique MOUVEMENT RECTILIGNE - 3eme Sciences Exp 2015-2016 MR MABROUKI SALAHDocument6 pagesSerie Dexercices N8 Lycee Pilote - Physique MOUVEMENT RECTILIGNE - 3eme Sciences Exp 2015-2016 MR MABROUKI SALAHRaslen Melki0% (1)
- 2010-11 Cours 03-Premier-Principe ThermoDocument16 pages2010-11 Cours 03-Premier-Principe ThermoSèíf KâdŕïPas encore d'évaluation
- Af 5052Document14 pagesAf 5052Verdi bobPas encore d'évaluation
- Mouvement de RotationDocument31 pagesMouvement de RotationYoussef LahbielPas encore d'évaluation
- Serie - Exo.edp.2018 19 PDFDocument6 pagesSerie - Exo.edp.2018 19 PDFRingo100% (1)
- Béton Armé - Généralités Et Principes de CalculDocument11 pagesBéton Armé - Généralités Et Principes de CalculEmmanuel Francis100% (2)
- Notes de Cours RDM Université de M'sila 2019/2020 1Document13 pagesNotes de Cours RDM Université de M'sila 2019/2020 1Laid Benaboura100% (1)
- Hydraulique de Station de PompageDocument126 pagesHydraulique de Station de PompageZineb AssafianiPas encore d'évaluation
- CNC MP 2017 Physique 2 Epreuve PDFDocument9 pagesCNC MP 2017 Physique 2 Epreuve PDFafif ikramePas encore d'évaluation
- Table Thermodynamique R404ADocument4 pagesTable Thermodynamique R404ASoukaina Jirari100% (1)
- Armatures TransversalesDocument4 pagesArmatures Transversalesfarid RezigPas encore d'évaluation
- Achar2Bases de Calcul de lEC3Document19 pagesAchar2Bases de Calcul de lEC3Omar OmarPas encore d'évaluation
- Polycope RDM L3 S1 Sep 2016Document111 pagesPolycope RDM L3 S1 Sep 2016NocifLyes100% (1)
- Corrige Td3 P&C Gcv2 IpsasDocument30 pagesCorrige Td3 P&C Gcv2 IpsasAmin Jamoussi50% (2)
- Corrige Physique PC 2022Document4 pagesCorrige Physique PC 2022Lionel MonteiroPas encore d'évaluation
- Xercice: Td1 Mas - Plaque Et Bilan de PuissanceDocument6 pagesXercice: Td1 Mas - Plaque Et Bilan de Puissancetiaiba ramziPas encore d'évaluation
- TTV Exo1Document8 pagesTTV Exo1Rayleight SilversPas encore d'évaluation
- Cours Hydrostatique TC3 v2008Document91 pagesCours Hydrostatique TC3 v2008Sammer Malek100% (1)
- P bts99Document2 pagesP bts99Gueye OusmanePas encore d'évaluation
- Exercices 6 Mouvement Dun Projectile Dans Le Champ de Pesanteu PR Hammou MounaDocument1 pageExercices 6 Mouvement Dun Projectile Dans Le Champ de Pesanteu PR Hammou Mounahamzacrypto080Pas encore d'évaluation
- TD N°4 em 2 18-19Document3 pagesTD N°4 em 2 18-19Shekina Évangile MABIALAPas encore d'évaluation