Vous aimerez peut-être aussi
- Modélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxDocument7 pagesModélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxOkacha AmraouyPas encore d'évaluation
- DPGF Charpente MetalliqueDocument2 pagesDPGF Charpente Metalliquekarim faroukhiPas encore d'évaluation
- 0022 - Guide de Transcription en Français - Juillet 2021 TMDocument28 pages0022 - Guide de Transcription en Français - Juillet 2021 TMAhmed HaniPas encore d'évaluation
- TP Api1-1 MicroLogix1200Document6 pagesTP Api1-1 MicroLogix1200Mohamed RgnPas encore d'évaluation
- Travaux Pratiques Cicuits ProgrammablesDocument18 pagesTravaux Pratiques Cicuits ProgrammablesNihed HachimiPas encore d'évaluation
- PolyDocument69 pagesPolyMy WorkPas encore d'évaluation
- Développeur WebDocument23 pagesDéveloppeur Webpou testeshitPas encore d'évaluation
- Compte Rendu de Mini Stage D'étéDocument38 pagesCompte Rendu de Mini Stage D'étéHasnae BohouchPas encore d'évaluation
- Igsit - Automatisme - MicrocontrôleursDocument77 pagesIgsit - Automatisme - MicrocontrôleursMohamed Salim Compaore100% (1)
- Travaux Pratiques - Microprocesseurs MicrocontrôleursDocument11 pagesTravaux Pratiques - Microprocesseurs MicrocontrôleursMila zPas encore d'évaluation
- Documentation Technique PDFDocument8 pagesDocumentation Technique PDFEslem IslamPas encore d'évaluation
- Projet ElectroDocument10 pagesProjet ElectroDonatien ZONGOPas encore d'évaluation
- Sup 3Document13 pagesSup 3jgildominPas encore d'évaluation
- Cours MicrocontroleurDocument86 pagesCours MicrocontroleurAFADPas encore d'évaluation
- CR TP2 Sabrine&Tarek GI2B G2Document6 pagesCR TP2 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- SY20Document17 pagesSY20Karim CKPas encore d'évaluation
- CR TP1 Sabrine&Tarek GI2B G2Document5 pagesCR TP1 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- TD Mesures en ReseauDocument25 pagesTD Mesures en ReseauKhaled OuniPas encore d'évaluation
- EC4 TP2b PDFDocument8 pagesEC4 TP2b PDFPape Niokhor NdiayePas encore d'évaluation
- VMNSXICM Formation Vmware NSX Installation Configuration Et Administration PDFDocument2 pagesVMNSXICM Formation Vmware NSX Installation Configuration Et Administration PDFCertyouFormationPas encore d'évaluation
- m02 - Interprétation de Schémas, de Plans Et de Devis Ge-Esa BackupDocument9 pagesm02 - Interprétation de Schémas, de Plans Et de Devis Ge-Esa BackupBakr IbrahimiPas encore d'évaluation
- M09 - Installation de Cables Et de CanalisationsDocument94 pagesM09 - Installation de Cables Et de Canalisationshypnose77Pas encore d'évaluation
- Atelier Systemes Industriels tp1 PDFDocument11 pagesAtelier Systemes Industriels tp1 PDFhayet debbichPas encore d'évaluation
- Projet RobotiqueDocument6 pagesProjet RobotiqueWillybrood FonckPas encore d'évaluation
- Travaux Pratiques2Document7 pagesTravaux Pratiques2Tarek KlaiPas encore d'évaluation
- TP VoipDocument6 pagesTP Voipapi-311669231100% (1)
- TP 3 RNDocument2 pagesTP 3 RNIlyes KhelifiPas encore d'évaluation
- Etude Et Conception D'un Diviseur de Puissance Bi-Bande À Quatre PortsDocument85 pagesEtude Et Conception D'un Diviseur de Puissance Bi-Bande À Quatre PortsMohamedPas encore d'évaluation
- TP DHCP DNS Tdsi2 EmigDocument3 pagesTP DHCP DNS Tdsi2 EmigAdil AbouelhassanPas encore d'évaluation
- Syllabus AssembleurDocument41 pagesSyllabus Assembleuraelghazi100% (1)
- Fondamentaux Des Réseaux: Le Protocole DHCPDocument4 pagesFondamentaux Des Réseaux: Le Protocole DHCPIT-NetworkPas encore d'évaluation
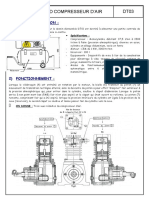
- TD CompresseurDocument12 pagesTD CompresseurMostfa RiahiPas encore d'évaluation
- Arduino Et Simulink/Matlab® Un Outil Innovant À Coût Réduit Pour Le PrototypageDocument12 pagesArduino Et Simulink/Matlab® Un Outil Innovant À Coût Réduit Pour Le PrototypageYassine MbzPas encore d'évaluation
- TP2 Arduino SerialDocument7 pagesTP2 Arduino SerialBarry Mamadou LamaranePas encore d'évaluation
- TD Rfid Solution 2Document10 pagesTD Rfid Solution 2Ahmed MsfPas encore d'évaluation
- Les Systemes de Numeration 1Document7 pagesLes Systemes de Numeration 1api-26418638Pas encore d'évaluation
- Compteur VHDLDocument6 pagesCompteur VHDLfarah_louzaliPas encore d'évaluation
- GNS 3Document38 pagesGNS 3jaouad AGHLALAPas encore d'évaluation
- TP Réseaux Locaux Indust TP1Document15 pagesTP Réseaux Locaux Indust TP1mabrouka gmidenPas encore d'évaluation
- S2-1b AP1 Distributeur Savon (Adapter)Document6 pagesS2-1b AP1 Distributeur Savon (Adapter)beiebfyhfzPas encore d'évaluation
- Chapitre 2 Introduction Sur Les MicrocontroleursDocument15 pagesChapitre 2 Introduction Sur Les MicrocontroleursMedPas encore d'évaluation
- TD 01Document1 pageTD 01Anonymous PKdzRZ7100% (1)
- Sae-Situer Une Organisation Dans Son EnvironnementDocument8 pagesSae-Situer Une Organisation Dans Son Environnementapi-633541138Pas encore d'évaluation
- Dossier de Candidature Pour Un Poste de TechnologueDocument17 pagesDossier de Candidature Pour Un Poste de TechnologueMayssa RjaibiaPas encore d'évaluation
- Chaiptre 1 Systeme A MicroprocesseurDocument13 pagesChaiptre 1 Systeme A MicroprocesseurStive TagnePas encore d'évaluation
- DéfinitionDocument5 pagesDéfinitionAicha B'mh100% (1)
- Cours Cs 1Document7 pagesCours Cs 1Syrine BouhachemPas encore d'évaluation
- Telephone CiscooDocument26 pagesTelephone CiscooGERAUDPas encore d'évaluation
- Manuel PL7 MicroDocument32 pagesManuel PL7 MicroZakariae El100% (1)
- BTP RESEAUDocument2 pagesBTP RESEAUNoùr Haffoudhi Ep KramtiPas encore d'évaluation
- Projet Trakeur GPS - GSM PDFDocument50 pagesProjet Trakeur GPS - GSM PDFChabehouPas encore d'évaluation
- CCENT Correction PDFDocument25 pagesCCENT Correction PDFpatrickPas encore d'évaluation
- Guide de Démarrage - Stm32Cubeide Carte Extension 746Ng Ens: Anthony Juton, Pascal Varoqui - Février 2023Document21 pagesGuide de Démarrage - Stm32Cubeide Carte Extension 746Ng Ens: Anthony Juton, Pascal Varoqui - Février 2023Anthony Juton100% (1)
- TP RobotiqueDocument7 pagesTP RobotiqueSalma El BouzidiPas encore d'évaluation
- PIC en C - FonctionsDocument17 pagesPIC en C - FonctionsHaythem FerjaniPas encore d'évaluation
- Sirena SonerieDocument7 pagesSirena SonerieIordan Dan FfnPas encore d'évaluation
- Chapitre 3 Le Microcontroleur Pic 16f84Document29 pagesChapitre 3 Le Microcontroleur Pic 16f84Samen LempirePas encore d'évaluation
- Pic 16F876-77Document73 pagesPic 16F876-77Ayman Brs100% (1)
- Apprendre et enseigner sur le Web: quelle ingénierie pédagogique?D'EverandApprendre et enseigner sur le Web: quelle ingénierie pédagogique?Pas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- Extraction et Gestion des Connaissances: Actes de la conférence EGC'2019D'EverandExtraction et Gestion des Connaissances: Actes de la conférence EGC'2019Évaluation : 5 sur 5 étoiles5/5 (1)
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Pic 16F84 PDFDocument21 pagesPic 16F84 PDFAhmed JanatiPas encore d'évaluation
- C# TutorialDocument457 pagesC# TutorialdahevosPas encore d'évaluation
- Csharp - L'essentiel en ConcentréDocument42 pagesCsharp - L'essentiel en Concentréhass_78Pas encore d'évaluation
- 16 FpgaDocument11 pages16 FpgaToon ManPas encore d'évaluation
- Carte Circuits Vélo Du Département de VaucluseDocument2 pagesCarte Circuits Vélo Du Département de VaucluseADTHautVauclusePas encore d'évaluation
- VOA Beton Precontraint 2019chap4Document28 pagesVOA Beton Precontraint 2019chap4Alaeddine KharchiPas encore d'évaluation
- Strategie Marketing de MaseratiDocument3 pagesStrategie Marketing de MaseratiAmine AmalikPas encore d'évaluation
- NORME ISO UE Détermination - Exposition - Au - BruitDocument54 pagesNORME ISO UE Détermination - Exposition - Au - BruitKouroufia Diaby GassammaPas encore d'évaluation
- Bts GC 2000Document7 pagesBts GC 2000Matthew BennettPas encore d'évaluation
- Projet Modelisation BioreacteurDocument14 pagesProjet Modelisation BioreacteurFatma GharsallahPas encore d'évaluation
- FICHE - PRODUIT - QUALIFIANT - Technicien Supérieur en Méthodes Et Exploitation LogistiqueDocument2 pagesFICHE - PRODUIT - QUALIFIANT - Technicien Supérieur en Méthodes Et Exploitation Logistiqueherve combettePas encore d'évaluation
- Index Bureau D - Étude PDFDocument17 pagesIndex Bureau D - Étude PDFNour El ImènePas encore d'évaluation
- 00 RC TvxHangarCTMDocument11 pages00 RC TvxHangarCTMsebastien KNAFELPas encore d'évaluation
- PresentaDocument15 pagesPresentaqaadilPas encore d'évaluation
- Hitachi Plasma 42pd3200aDocument57 pagesHitachi Plasma 42pd3200afaroltek1146Pas encore d'évaluation
- Controle Direct de CoupleDocument159 pagesControle Direct de Coupleعبد الرحمان للرياضياتPas encore d'évaluation
- Document 45Document2 pagesDocument 45xxxPas encore d'évaluation
- La Communication InterhumaineDocument91 pagesLa Communication Interhumainelyes1203100% (1)
- Corrige TD Be 3imacs Ampli PuissanceDocument10 pagesCorrige TD Be 3imacs Ampli PuissanceBilel Dekhili100% (1)
- ViakonDocument2 pagesViakonRiGo MartinezPas encore d'évaluation
- Rapport de Stage Cristal StrassDocument40 pagesRapport de Stage Cristal StrassToufik ZeroukPas encore d'évaluation
- MTZ 1221.5 Tier 4 ME FRDocument172 pagesMTZ 1221.5 Tier 4 ME FRMtzindexPas encore d'évaluation
- Cours Terrassement Ofppt PDFDocument101 pagesCours Terrassement Ofppt PDFAbdelaliElFaiz50% (2)
- Prague Card Guide 2016-2017 PDFDocument137 pagesPrague Card Guide 2016-2017 PDFAbhiron BhattacharyaPas encore d'évaluation
- Coureurs D'étoiles - La Croisade Impie PrétirésDocument3 pagesCoureurs D'étoiles - La Croisade Impie PrétirésMister ZombiePas encore d'évaluation
- LEXON Catalogue 2013 MDDocument59 pagesLEXON Catalogue 2013 MDIsadora RicardoPas encore d'évaluation
- Nettoyeur Plage AnalyseDocument3 pagesNettoyeur Plage AnalyseMohsen SaidiPas encore d'évaluation
- Equipement de Forage de Forage Chap 02Document12 pagesEquipement de Forage de Forage Chap 02Mohamed GrinePas encore d'évaluation
- Industriels RobotiqueDocument13 pagesIndustriels RobotiqueFranck DernoncourtPas encore d'évaluation
- Goulottes Pour EscaliersDocument8 pagesGoulottes Pour EscaliersMarwan ZoueinPas encore d'évaluation
- Dessin Simple - Recherche GoogleDocument1 pageDessin Simple - Recherche Googlegpzk2fjty4Pas encore d'évaluation
- Dossier MarketingDocument6 pagesDossier Marketingzaki2300Pas encore d'évaluation