Académique Documents
Professionnel Documents
Culture Documents
These Ferrero
Transféré par
Sandrine GallardCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
These Ferrero
Transféré par
Sandrine GallardDroits d'auteur :
Formats disponibles
UNIVERSIT DE NICE-SOPHIA ANTIPOLIS
cole Doctorale des Sciences et Technologies de l'Information et de la Communication
THSE
pour obtenir le titre de
Docteur en Sciences
de l'UNIVERSIT de Nice-Sophia Antipolis
Discipline : lectronique
Reconfiguration dynamique d'antennes imprimes en directivit
et polarisation
Prsente par :
Fabien FERRERO
Directeur de Thse : Gilles Jacquemod
Soutenance le 19 Novembre 2007 devant le jury compos de :
M Philippe Benech Professeur, Univ. J. Fourier Rapporteur
M Christian Person Professeur, LEST Rapporteur
M Yann DEVAL Professeur, IMS Examinateur
M Gilles Jacquemod Professeur, UNSA Examinateur
M Cyril Luxey Matre de confrences, UNSA Examinateur
M Robert Staraj Professeur, UNSA Examinateur
M Patrick Pons Ingnieur de recherche, LAAS Examinateur
Mme Andreia Cathelin Ingnieur senior, ST Examinateur
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Remerciements
Ce travail de recherche a t ralis au sein du Laboratoire d'lectronique Antennes et
Tlcommunications (LEAT), Universit de Nice-Sophia Antipolis. Je tiens remercier Monsieur
Christian PICHOT, Directeur de Recherche au CNRS et Directeur de ce laboratoire, de m'avoir
accueilli et donn les moyens ncessaires pour accomplir ce doctorat.
J'adresse mes sincres remerciements Monsieur le Professeur Gilles JACQUEMOD,
directeur de l'cole Polytechnique de l'Universit de Nice-Sophia Antipolis, qui a t mon directeur
de thse durant ces quatre annes. Qu'il trouve ici l'expression de ma profonde reconnaissance pour
la confiance qu'il m'a accorde, sa motivation et sa bonne humeur si utile lors des priodes
difficiles.
J'adresse tous mes remerciements Monsieur Robert STARAJ, Professeur l'Universit de
Nice Sophia-Antipolis, responsable de l'quipe Antennes actives , pour ses conseils aviss et ses
ides lumineuses.
Je remercie Monsieur Cyril LUXEY, Matre de Confrences l'Universit de Nice Sophia-
Antipolis, pour avoir galement assur l'encadrement de cette thse, pour m'avoir accord de son
temps lors de mes nombreuses questions et m'avoir appris la rigueur ncessaire au travail de
recherche.
Je souhaite exprimer ma reconnaissance Monsieur Vincent FUSCO, Professeur la Queen
University de Belfast, pour son aide et ses conseils aviss. Ses intuitions ont t le point de dpart
de la plupart de mes travaux.
Je prie Monsieur Yann DEVAL, Professeur du Laboratoire de l'intgration du matriaux au
systme de Bordeaux de trouver ici l'expression de mon profond respect pour avoir accept de
prsider mon jury de thse.
Mes remerciements les plus respectueux s'adressent galement Monsieur Philippe
BENECH, Professeur l'Universit Joseph Fourier de Grenoble, et Monsieur Christian PERSON,
Professeur l'Universit de Laboratoire d'Electronique et Systmes de Tlcommunications de
Brest, qui m'ont fait l'honneur d'examiner ce travail et d'assurer la tche de rapporteur.
J'adresse mes remerciements Madame Andreia CATHELIN, Ingenieur senior chez ST
Microelectronic, et Monsieur Patrick PONS, Ingnieur de recherche au laboratoire de Toulouse
pour m'avoir fait l'honneur de participer mon jury de thse.
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Je tiens remercier le ple technique du LEAT, Monsieur Jean-Louis LE SONN dont les
doigts de fe m'ont permis de mettre en application mes ides les plus saugrenues. Laurent
BROCHIER qui m'a permit de raliser les mesures en chambre anchoide et qui m'a transmis le
virus de la course pied. Merci aussi Franck PERRET pour sa disponibilit sur tous les sujets et
son travail consciencieux lors des mes (trop) nombreuses ralisations d'antennes.
Je remercie Madame Martine BORRO pour son aide administrative ainsi que Monsieur
Christian RAFFAELE pour sa bienveillance, sa bonne humeur et ses conseils en salle de
musculation.
Que Matthieu MULTARI, doctorant au LEAT, trouve ici l'expression de ma reconnaissance
pour toute l'aide qu'il a pu me fournir lorsque que nous partagions le mme bureau ainsi que les
bons moments passs ensemble au laboratoire.
Je tiens aussi remercier mes futurs collaborateurs Benjamin NICOLLE, Alexandre
LEWICKI et Rami KHOURI, en esprant que la conclusion de cette thse porte chance notre
projet commun.
Mes remerciements vont galement Madame Claire MIGLIASCIO et Messieurs William
TATINIAN, Ioannis ALIFERIS, Philippe LETHUC, Nicolas FORTINO, Matre de Confrences
l'Universit de Nice Sophia-Antipolis.
Je remercie galement les doctorants, Post Doctorant et ATER, anciens et actuel, merci
Herv, Chu Chen, Duong, Christelle, Besma, Plamen, Clina, Fahed, Anthony, Aliou, Jrme,
Grgory, Anissa, Renaud, Phong, Stephane, Luca, Sylvain, Gwladys, Anthony, Ali, Mickal, ...
Enfin, je tiens remercier mes parents, il n'y a pas de mot assez fort pour exprimer ma
gratitude. Vous m'avez toujours encourag, soutenu lors de mes tudes, aid par tous les moyens
dont vous disposiez. Merci Florence ma petite soeur, Merci mes grand-mres Jeannine et Jeanne.
Une pense mu aussi pour mon grand-pre Guy qui pour quelques semaines n'aura pas pu
assister ma soutenance.
Les derniers mots vont ma fiance Camille. Je te remercie d'avoir toujours su trouver les
mots pour me remettre en selle lors de moments difficiles.
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Table des matires
Introduction............................................................................1
Chapitre I : Dfinitions gnralits.......................................3
I.1.Gnralits..............................................................................................................4
I.1.1.Dfinition d'une antenne............................................................................................4
I.1.2.Historique...................................................................................................................5
I.2.Caractristiques de rayonnement.........................................................................6
I.2.1.Propagation des ondes................................................................................................6
I.2.2.Diagrammes de rayonnement.....................................................................................7
I.2.3.Gain et directivit.......................................................................................................8
I.3.Technique d'alimentation......................................................................................9
I.3.1.Effet de peau...............................................................................................................9
I.3.2.Ligne microruban.....................................................................................................10
I.3.3.Ligne coplanaire et coplanaire avec plan de masse..................................................11
I.3.4.Influence du substrat................................................................................................13
I.4.Antennes actives...................................................................................................13
I.4.1.Dfinition.................................................................................................................13
I.4.2.Les antennes actives quasi-intgres et entirement intgres.................................14
I.4.3.Intgration de composants actifs..............................................................................15
I.4.3.1.La technologie MIC .........................................................................................15
I.4.3.2.La technologie MMIC......................................................................................15
I.4.4.Fonctions des antennes actives.................................................................................16
I.4.4.1.Antennes actives agiles en frquence...............................................................16
I.4.4.2.Antennes actives pilotables en directivit........................................................16
I.4.4.2.1.Rseaux d'antennes linaires.....................................................................17
I.4.4.2.2.Balayage lectronique du faisceau............................................................19
I.4.4.2.3.Antennes actives reconfigurables en polarisation.....................................20
I.5.Contexte du travail...............................................................................................22
I.5.1.Investissement de recherche Europe/Etats-Unis/Asie..............................................22
I.5.2.Le LEAT et les antennes actives..............................................................................23
I.5.2.1.Antennes continuement pilotables en frquence .............................................23
I.5.2.2.Antennes pilotables par commutation..............................................................24
I.5.2.3.Antennes reconfigurables en frquence avec composants microsystmes.......25
I.5.3.Collaborations scientifiques.....................................................................................26
I.5.3.1.The Institute of Electronics, Communications and Information Technology,
Queen University of Belfast........................................................................................26
I.5.3.2.Radio Laboratory, Helsinki University of technology......................................26
I.6.Conclusion.............................................................................................................26
Rfrences Chapitre I................................................................................................27
Chapitre 2 : tat de l'art......................................................29
II.1. Composants actifs de commutation.................................................................30
II.1.1. Commutateurs lectroniques base de matriaux semi-conducteurs....................30
II.1.1.1. Diode PIN.......................................................................................................30
II.1.1.2. Transistor MESFET.......................................................................................31
II.1.2. Commutateurs MEMS...........................................................................................32
II.1.2.1. Dfinition, avantages et inconvnients..........................................................32
II.1.2.2. Architectures srie ou parallle des MEMS...................................................33
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
II.1.2.2.1. L'architecture srie ................................................................................33
II.1.2.2.2. L'architecture parallle ou architecture shunt ........................................35
II.1.2.3. Procd de ralisation....................................................................................37
II.1.2.3.1. Couches sacrificielles.............................................................................37
II.1.2.3.2. Stress dans les membranes suspendues..................................................38
II.1.2.4. Procds d'activation......................................................................................39
II.1.2.4.1. lectrostatique........................................................................................40
II.1.2.4.2. Thermique...............................................................................................41
II.1.2.4.3. Magntostatique.....................................................................................42
II.1.2.4.4. Piezolectrique.......................................................................................42
II.1.2.5. Mise en botier................................................................................................43
II.1.3. tat de l'art des microcommutateurs......................................................................44
II.1.3.1. Les microcommutateurs srie........................................................................44
II.1.3.2. Les microcommutateurs parallles.................................................................46
II.2. Capacits variables............................................................................................47
II.2.1. Diode varactor........................................................................................................47
II.2.2. Capacit variable MEMS.......................................................................................49
II.3. Circuits passifs et actifs.....................................................................................51
II.3.1. Coupleur hybride ..................................................................................................51
II.3.1.1. Coupleur ligne de transmission quart d'onde..............................................51
II.3.1.2. Coupleur hybride quasi-discret......................................................................52
II.3.1.3. Hybride reconfigurable .................................................................................52
II.3.2. Dphaseur..............................................................................................................54
II.3.2.1. Lignes commutes..........................................................................................54
II.3.2.2. Lignes charges..............................................................................................55
II.3.2.3. Matrice de Butler............................................................................................57
II.3.2.4. Hybride en mode rflexion.............................................................................58
II.3.2.5. Dphaseur par addition vectorielle.................................................................59
II.4. Antennes actives.................................................................................................60
II.4.1.1. Antennes reconfigurables en frquence.........................................................60
II.4.1.1.1. Antennes actives de type microruban.....................................................60
II.4.1.1.2. Antennes actives de type fente...............................................................63
II.4.1.1.3. Antenne PIFA reconfigurable en frquence............................................64
II.4.1.1.4. Antennes avec composants MEMS........................................................66
II.4.1.2. Antennes polarisation commande..............................................................67
II.4.2. Antennes reconfigurables en directivit.................................................................67
II.4.2.1. Rseaux d'antennes avec dphaseurs.............................................................67
II.4.2.2. Rseaux avec lments parasites....................................................................73
II.4.2.2.1. Dfinition................................................................................................73
II.4.2.2.2. Antenne lments parasites commandables.........................................74
II.5. Conclusion..........................................................................................................75
Rfrences Chapitre II..............................................................................................76
Chapitre III : Composants MEMS.........................................81
III.1. Composants SPDT industriels de la socit Magfusion................................82
III.1.1. Structure et fonctionnement..................................................................................82
III.1.2. Caractrisation sur substrat alumine ....................................................................83
III.2. tude de commutateurs MEMS sous le logiciel Coventor...........................84
III.2.1. Prsentation du simulateur Coventor....................................................................84
III.2.2. Flot de conception pour un MEMS lectro-thermique.........................................85
III.3. tudes bases sur le process de la Queens University de Belfast.................89
III.4. Ralisations ddies de micro-structures avec le procd MetalMumps....92
III.4.1. Process ddi Mumps +........................................................................................92
III.4.1.1. Dtail du process...........................................................................................92
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
III.4.2. Conception des structures MEMS........................................................................94
III.4.2.1. 1. Ligne de propagation................................................................................95
III.4.2.1.1. Conception des lignes...........................................................................95
III.4.2.1.2. Mesure des lignes..................................................................................96
III.4.2.2. 2. MEMS srie..............................................................................................97
III.4.2.2.1. tude lectromagntique des structures................................................97
III.4.2.2.2. tude mcanique des structures ...........................................................97
III.4.2.2.3. Ralisation de la structure et mesure.....................................................99
III.4.2.2.4. 3. MEMS shunt, ralisation et mesure................................................101
III.4.2.3. Conclusion et perspectives pour les ralisations MEMS............................102
III.5. Conclusion.......................................................................................................102
Rfrences chapitre III............................................................................................103
Chapitre IV : Antennes polarisation commande..........105
IV.1. Antenne polarisation circulaire double bande...........................................106
IV.1.1. Introduction.........................................................................................................106
IV.1.2. Choix de l'architecture antennaire.......................................................................106
IV.1.3. Conception de l'antenne......................................................................................107
IV.1.3.1. Conception spare des antennes................................................................107
IV.1.3.2. Antenne en bande L.....................................................................................107
IV.1.3.3. Antenne en bande X....................................................................................108
IV.1.4. Association des deux antennes............................................................................109
IV.1.5. Rsultats .............................................................................................................111
IV.1.5.1. Adaptation...................................................................................................111
IV.1.5.2. Gain et rapport axial....................................................................................112
IV.1.5.3. Rayonnement et polarisation.......................................................................112
IV.1.5.4. Conclusions.................................................................................................113
IV.2. Antenne double polarisation linaire avec commutateur SPDT MEMS 113
IV.2.1. Alimentation d'une antenne patch par ligne coplanaire .....................................114
IV.2.1.1. 1. Conception de la partie rayonnante.........................................................114
IV.2.1.2. 3.Insertion du commutateur SPDT de Magfusion.......................................115
IV.2.1.3. Conclusion...................................................................................................116
IV.3. Hybride semi-discret reconfigurable.............................................................116
IV.3.1. Coupleur semi-discret simple..............................................................................116
IV.3.1.1. Thorie et conception..................................................................................117
IV.3.1.1.1. Cas gnral..........................................................................................117
IV.3.1.1.2. Cas de l'hybride 3dB............................................................................119
IV.3.1.2. Ralisation et mesures.................................................................................120
IV.3.1.2.1. Coupleur passif....................................................................................120
IV.3.1.2.2. Coupleur actif......................................................................................122
IV.3.2. Double hybride quasi-discret..............................................................................124
IV.3.2.1. Thorie........................................................................................................124
IV.3.2.2. Thorie du coupleur double 3 dB................................................................125
IV.3.2.3. Prototype et mesure.....................................................................................128
IV.3.2.4. Conclusion...................................................................................................129
IV.4. Antenne diversit de polarisation...............................................................129
IV.4.1. Introduction.........................................................................................................130
IV.4.2. Principe de fonctionnement................................................................................130
IV.4.3. Conception de l'lment rayonnant.....................................................................131
IV.4.4. Antenne reconfigurable par composants discrets................................................132
IV.4.5. Antenne reconfigurable en polarisation avec diodes varactor............................133
IV.4.5.1. Conclusion...................................................................................................135
IV.5. Antenne reconfigurable en polarisation linaire..........................................136
IV.5.1. Simulations et mesures.......................................................................................137
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
IV.5.2. Conclusion..........................................................................................................138
IV.6. Conclusion.......................................................................................................138
Rfrences Chapitre IV...........................................................................................139
Chapitre V : Antennes rayonnement command........141
V.1Hybride en mode rflexion................................................................................142
V. 1.1Rseaux d'antennes deux lments.....................................................................142
V. 1.1.1 Principe.........................................................................................................142
V. 1.1.2 Conception de l'antenne 2 patchs...............................................................143
V. 1.1.3 Prototype passif............................................................................................143
V. 1.1.4 Prototype avec lments actifs.....................................................................144
V. 1.2Rseau 3 lments..............................................................................................146
V. 1.2.1 Conception de l'antenne 3 patchs ..............................................................146
V. 1.2.2 Prototype et rsultats....................................................................................148
V. 1.3. Conclusion...........................................................................................................149
V.2Dphaseur par sommation en quadrature.......................................................150
V. 2.1Dphaseur avec hybride quasi-discret reconfigurable .........................................150
V. 2.1.1 Analyse thorique.........................................................................................150
V. 2.1.2 Ralisation et mesures du dphaseur simple................................................153
V. 2.1.3 Conception d'un dphaseur double...............................................................155
V. 2.2Rseau d'antennes deux lments.......................................................................156
V. 2.2.1 Conception....................................................................................................157
V. 2.2.2 Mesures.........................................................................................................157
V. 2.3Rseau d'antenne quatre lments......................................................................158
V.3Antenne reconfigurable avec lments parasites.............................................158
V. 3.1Conception............................................................................................................159
V. 3.2Mesures.................................................................................................................159
V.4Rseau tout intgr sur substrat Si High K......................................................161
V. 4.1Introduction...........................................................................................................161
V. 4.2Dphaseur..............................................................................................................162
V. 4.3ANTENNES..........................................................................................................164
V. 4.4Ralisation et mesures...........................................................................................166
V. 4.4.1 Dphaseur.....................................................................................................166
V. 4.4.2 Antennes.......................................................................................................167
V.5. Conclusion.........................................................................................................169
Rfrences chapitre V..............................................................................................170
Conclusion et perspectives..............................................171
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Introduction
Introduction
Les annes 1990 ont vu l'mergence de la tlphonie mobile qui allait en moins de 10 ans
rvolutionner notre manire de communiquer. Cette perce technologique a ouvert la porte
une nouvelle re dans le domaine des tlcommunications, celle du "tout mobile". Face
l'augmentation du nombre d'utilisateurs, des fonctionnalits et du dbit des transmissions, le
concept d'antenne intelligente est apparu comme la seule rponse possible ces nouveaux dfis.
Ces antennes doivent tre capables de s'adapter leur environnement en modifiant leur
frquence de fonctionnement, leur polarisation ou leur diagramme de rayonnement.
Concevoir des antennes reconfigurables est un challenge majeur pos aux ingnieurs RF,
commencer par le dveloppement d'lments actifs fiables, performants, intgrables, fabricables
en grand volume et permettant donc de minimiser les cots de production.
Jusqu' aujourd'hui, l'industrie des tlcommunications a privilgi les composants de type semi-
conducteurs car ils rpondent dans l'ensemble aux critres prcdemment mentionns.
Cependant, de part l'augmentation des frquences et les contraintes accrues en termes de pertes et
de linarit, de nouveaux composants radiofrquences de type micro-lectromcaniques (MEMS
RF) pourraient devenir indispensables.
Les travaux prsents dans ce manuscrit portent donc d'une part, sur la conception de composants
MEMS RF performants et d'autre part, sur la conception d'antennes adaptes la reconfiguration
en polarisation ou en directivit.
Le premier chapitre est consacr une prsentation des antennes et des paramtres qui les
caractrisent. Une dfinition des antennes actives est par la suite propose, puis nous indiquerons
quelles sont les diffrents types de reconfigurations possibles. Le travail sera enfin prsent dans
son contexte au niveau du LEAT, et des collaborations internationales.
Dans le deuxime chapitre, un tat de l'art gnral est propos. Nous prsenterons les
diffrents composants actifs existants ainsi que leurs performances respectives. Les diffrents
microsystmes RF de type switch seront notamment abords et compars. Dans un second temps,
nous tudierons les diffrentes architectures de circuits et d'antennes reconfigurables bases sur
les composants prcdemment dcrits. Les diffrentes topologies de coupleurs actifs seront
prsentes, suivies des divers types de dphaseurs capables d'alimenter un rseau d'antennes. Les
architectures d'antennes reconfigurables en frquence, polarisation et directivit seront enfin
abordes.
1
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Introduction
Le troisime chapitre est consacr l'tude des composants MEMS. Un premier MEMS
industriel a ainsi t intgr sur une ligne RF et caractris. Diffrentes architectures de
commutateur MEMS sont par la suite tudies l'aide du logiciel Coventor. Enfin, la conception
d'un commutateur RF l'aide du procd industriel de la socit MEMScap est prsent. Les
composants raliss sont enfin mesurs et caractriss.
Le quatrime chapitre porte sur la conception d'antennes polarisation circulaire et
reconfigurables en polarisation. La premire antenne prsente est conue pour des
communications satellitaires bi-bandes. Un nouveau type de coupleur hybride reconfigurable est
par la suite tudi et thoris. A partir de ce composant, une nouvelle architecture d'antenne
capable de commuter son diagramme de rayonnement entre une polarisation circulaire et linaire
est prsente. Une deuxime antenne intelligente polarisation linaire est tudie, celle-ci peut
tourner sur elle-mme de 90 de manire lectronique.
Le cinquime et dernier chapitre de ce mmoire propose l'tude de nouvelles architectures
d'antennes reconfigurables en diagramme de rayonnement. Une premire topologie base sur les
coupleurs hybrides en mode rflexion est tudie. Une deuxime solution utilisant des coupleurs
reconfigurables est ensuite aborde. Enfin, nous proposons l'tude d'un rseau d'antennes avec
son rseau de dphasage en tout intgr sur Silicium 60 GHz.
2
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Chapitre I
DEFINITIONS ET
GENERALITES
ans ce premier chapitre, aprs avoir donn la dfinition d'une
antenne, et prsent un bref historique sur le dveloppement des
antennes de Faraday nos jours, nous prciserons un certain
nombre d'hypothses de travail (zone de Fresnel, champ lointain, ). A
partir de celles-ci, nous dcrirons les diffrentes caractristiques d'une
antenne ainsi que diffrentes grandeurs associes comme le gain et la
directivit. Par la suite, les diffrentes reconfigurations possibles pour une
antenne active seront prsentes. Nous situerons enfin notre travail dans le
contexte scientifique international.
D
I.1. Gnralits...............................................................................4
I.2. Caractristiques de rayonnement............................................6
I.3. Technique d'alimentation........................................................9
I.4. Antennes actives....................................................................13
I.5. Contexte du travail................................................................22
I.6. Conclusion.............................................................................26
3
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
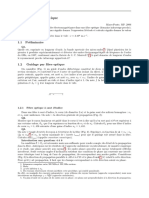
I.1. GNRALITS
I.1.1. Dfinitiond'uneantenne
Defaontrsgnrale,uneantennepeuttreconsidrecommeuntranspondeurentreuneonde
lectromagntiqueetlamatire(dplacementd'lectrons).Sionserfreaucassimpledufildroit
(FigureI.1),onpeutdduirepartirdelaforcedeLorenz,l'quationduchampmagntiqueBpour
uncourantcirculantsurcefil(relationI.1)avec
0
lapermabilitmagntiqueduvide.Lechamp
magntique est directement proportionnel au courant qui circule sur le fil. De plus, ce courant
correspondunfluxdenchargesquisedplacenttouteslammevitessev,celleciestliela
densitdecourantparl'quation(I.1)avecqchargelectriqued'unlectron.
B=(
0
2
)
i
r
et j=nqv (I.1)
L'acclration dune charge lectrique engendre une variation proportionnelle du champ
magntique B. Les ondes lectromagntiques sont la propagation de perturbations du champ
lectromagntique,cestdiredevariationsduchampenfonctiondutemps.
L'oscillationcontinued'uncourantdansunestructureengendrel'oscillationd'unchampmagntique
lammefrquenceetgnredoncuneondelectromagntiquecettefrquence.
Uneantenne,seprsentedonccommeunestructuredontlaformeetlesmatriauxconstitutifssont
conuspourfavoriserlarsonancedetelscourants.
Almission,leurexcitationestassureparungnrateurbranchdirectementlantenneoupar
lintermdiaire dun lment de liaison (ligne de transmission, guide dondes...). A la rception,
cestlondedanslaquellelantenneestimmergequiestresponsabledelacirculationdescourants,
collectslocalementparunrcepteur.
4
Figure I.1: Gomtrie du champ magntique issu d'un fil droit parcouru par un courant i
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.1.2. Historique
C'estpartirdestravauxdeMichaelFaraday(1831)surlesphnomnesdinductionqu'onaentrevu
lapossibilitdetransmettredistanceetsansfildessignauxlectriques.
Vers1865,JamesClerkMaxwelldmontrequel'lectricitetlemagntismepeuventtreunifisen
un seul phnomne: l'lectromagntisme. Par une synthse harmonieuse des diverses lois
exprimentales dcouvertes par ses prdcesseurs Ampre et Gauss (lois de l'lectrostatique, du
magntisme,del'induction...),illesexprimesouslaformed'unsystmedequatrequationsaux
drives partielles couples, qui ne prendront leur forme dfinitive qu'en 1873 (I.2) dans son
ouvrageElectricityandMagnetism:
rot
E=
6
B
6t
rot
H=
J +
6
D
6t
div D=j
div B=0
(I.2)
Il faut attendre les expriences de Heinrich Hertz (1887) pour confirmer cette thorie. Avec un
doublet lectrique, Hertz russit produire et dtecter des ondes dcimtriques. Guglielmo
Marconifranchitdestapesdcisivesenradiotlgraphiedansledomainedesondeskilomtriques
avec,audpart,unsimplefilreliuncerfvolant.Cetitaliendonneraceslmentsrayonnantsle
nomd'antenneenrfrencelaverguedugrementdesnaviresromains.Unetellednomination
convenaitparticulirementbienauxstructuresfilairesrayonnantesdployesparlespionniersdela
radiotlgraphiedslafinduXIX
me
sicle.Lapremireliaisontransatlantiqueeutlieuen1901.
Trs vite, les possibilits offertes par la triode, invente par Lee De Forest en 1906, permirent
deffectuerdesliaisonstlphoniquessurdegrandesdistances.
Jusquen 1920, lide persiste que, conformment aux thories dArnold Sommerfeld, seules les
ondeslonguespermettentdesliaisonsaudeldelhorizonpardiffractionlasurfacedelaTerre.
Cesontlesradioamateurs,relgusdansledomainedesondesdcamtriques,quimontrrentque
detellesliaisonssontpossiblesavecceslongueursd'onde,enutilisantlarflexionsurlionosphre.
Aceslongueursdonde,ladimensionraisonnabledesantennespermetunevolutiondesstructures
pouraccrotreladirectivitetrduireainsilespuissancesdmission.Lesarrangementsenlosange,
en V, , sont caractristiques des antennes fonctionnant ces frquences. Paralllement se
dveloppent les pylnes dmission pour radiodiffusion en ondes hectomtriques alors que les
rcepteurscorrespondantssontquipsdesimplescadres.
AveclaSecondeGuerremondialeapparutleradar,notammentgrceladcouvertedunnouveau
tube de puissance, le magntron (1940). Ds lors, la possibilit dobtenir des antennes trs
directives,desconditionsdepropagationfavorables,tantdanslionosphrequedanslatroposphre,
fontdesmicroondesunsupportbienadaptdenombreusessituations:liaisonsenvuedirectepar
faisceaux hertziens (1945), liaisons audel de l'horizon par diffusion troposphrique (1950),
radioastronomie, techniques spatiales (1960). A la retransmission de signaux de tlvision, de
communicationstlphoniquessajoutentlaidelanavigation,lesprvisionsmtorologiques,la
recherchederessourcesnaturelles,encequiconcernelesaspectscivils.
C'est l'arrive maturit d'un certain nombre de technologies microlectroniques (DSP,
amplificateurs faible bruit, filtres onde de surface) qui permet en 1990 de mettre au point le
systmeGSMdetlphoniecellulaire.
Ds lors, la tlphonie mobile donne un nouveau souffle aux tlcommunications avec un
dveloppementsansprcdentdestechnologiessansfil(Bluetooth,WLAN...).
5
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.2. CARACTRISTIQUESDERAYONNEMENT
Nous prendrons comme hypothse simplificatrice que lantenne rayonne de manire
monochromatiquecestdirequellemetuneondeuneseulefrquencef.
I.2.1. Propagationdesondes
QuandlepointOdobservationsetrouveloindelasourceavecunepropagationenespacelibre,le
frontdondeinitialementsphriquepeuttreconsidrencepointcommelocalementplan(Figure
I.2).
Enfonctiondeladistanceentrelasourcemettriceetlepointd'observation,onpeutdistinguertrois
rgions[I.1](FigureI.3).
Zonedechampproche:Cettezones'tenddel'antenned'missionjusqu'unesphrederayon
R
1
donneparlarelation(I.3)oDestlaplusgrandedimensiondel'antenneetlalongueur
d'onde mise. C'est la zone la plus complique modliser d'un point de vue
lectromagntique.
R
1
=0,62
.
D
3
\
(I.3)
LazonedeFresnel:Lesdiagrammesnesontpasformsetlocalementl'onden'estpasplane.
Cettezones'tenddeR
1
R
2
avec(I.4).
R
2
=2
D
2
\
(I.4)
LazonedeFraunhofer:Danscecas,l'ondeestconsidrecommelocalementplaneetlargion
s'tenddeR
2
l'infini.
6
Figure I.2: Hypothse du champ lointain.
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Figure I.3: Les diffrentes rgions de rayonnement.
I.2.2. Diagrammesderayonnement
Parlasuite,onseplaceradanslesconditionsdechamplointain.Pouruneondeplanesepropageant
danslevide,onpeutmontrerpartirdesquationsdeMaxwellque:
E et
B sontlafoistransverses(dansleplanperpendiculaireausensdepropagation)et
perpendiculairesentreeux(I.5).
H=
1
j
(u
E) et j=
j
c
(I.5)
Lechampsepropageavecunevitessevgale
1
.
cj
=
o
k
,o k=2
n
\
estlenombred'onde,
avec un terme de propagation exp(jkr) et une amplitude qui dcrot en
1
r
. Le champ
lectriqueadonclaformesuivante(I.6)[I.1].
E(r ,0 , )=A
e
jkr
r
F(0 , ) (I.6)
o
F(0 , ) reprsente la caractristique vectorielle de rayonnement exprime en coordonnes
sphriquesetAunnombrecomplexe.
A partir de la relation (I.6), on s'aperoit que la caractristique vectorielle de rayonnement
F(0 , ) et le champ
E(r ,0 , ) ne diffrent que dun terme de phase et damplitude. La
7
R
1
R
2
Zone de champ proche
Zone dite de Fresnel
Zone dite de Fraunhofer
D
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
reprsentation du champ lectrique
E(r ,0 , ) peut donc se limiter la reprsentation de
F (0, ).
On peut reprsenter la caractristique vectorielle de rayonnement dans tout lespace de deux
manires,chacuneayantsesavantagesetsesinconvnients:
reprsentation en coordonnes sphriques: gnralement utilise quand le champ est rparti
danstoutl'espace(antennepeudirective)commesurlaFigureI.4.
reprsentationencoordonnescartsiennes:gnralementutilisequandlechampestconcentr
autourd'unedirectionparticulire(antennedirective).
Cependantilestsouventmoinscoteuxenmesuredereprsenter
F(0 , ) pardescoupesoudes
projections.Lescourbesainsiobtenuessontappelesdiagrammesderayonnement.Ilestd'usage
d'effectuerlescoupesdanslesplansdesymtrie.Maisontrouvegnralementdescoupesdansles
plans de polarisation du champ (plan E, plan H). La reprsentation cartsienne est utilise pour
comparer les diagrammes. Par contre, la reprsentation polaire permet de mieux visulaliser la
couverturedurayonnement.
I.2.3. Gainetdirectivit
Selon lapplication considre, on peut essayer d'obtenir un rayonnement aussi uniforme que
possible dans lespace environnant, ou un clairage trs localis dune partie de cet espace. La
notion de directivit est importante et permet dapprcier la concentration du rayonnement ou
laptituderecevoiruneondelectromagntiquedansunedirectiondonne.
8
Figure I.4: Vue 3D du diagramme de rayonnement et coupes d'un diple
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Uneantenneisotropeseradfiniecommetantuneantennethoriquerayonnantdelammefaon
danstouteslesdirections.Apartirde
F (0, ) , ilestpossibledecalculerlacaractristiquede
rayonnementmoyendel'antenne(I.7).
F
moy
=
0
2n
0
n
F(0 ,)sin(0) d 0d
4n
(I.7)
La directivit est un nombre sans dimension dfini par un rapport de puissance entre l'antenne
mesureetuneantenneisotropealimenteaveclammepuissance(I.8).Demanirecourante,cette
grandeurestexprimeendBi(dcibelsparrapportl'antenneisotrope).
D( 0,)=
F(0 ,)
F
moy
=
F(0, )
4n
0
2n
0
n
F (0, )sin (0) d 0d
(I.8)
Legaind'uneantenneestdfiniparrapportladirectivit(I.9):
G(0 , )=j. D(0 , ) (I.9)
o est le rendement de l'antenne qui traduit les pertes entre la puissance totale rayonne et la
puissancetotalerellementfourniel'antenne.Cetermeprenddoncencomptelespertesohmiques
etdilectriquesdel'antenneainsiquelespertes dedsadaptationentrelegnrateur, laligne et
l'antenne.
I.3. TECHNIQUED'ALIMENTATION
I.3.1. Effetdepeau
Avantdedcrirelestechniquesd'alimentationd'uneantenne,rappelonslanotiond'effetdepeauqui
estunedesmanifestationslaplusfondamentaledelapropagationRF.Pourunconducteurdontla
rsistivit n'est pas nulle, un champ se propageant ne s'annule pas immdiatement l'interface
mtallique mais pntre sur une courte distance avant de disparatre [I.2]. La distance de
pntrationduchampdansleconducteurvarieaveclafrquence.Lechampenvahittoutelasurface
duconducteur,occupantunvolumedececonducteurqu'onappellerapeauduconducteur.Quand
les champs se propagent l'intrieur de la peau du conducteur, cela entrane de la dissipation
d'nergie.Demanirequantitative,l'paisseurdepeauestdfiniecommeladistancelaquellele
champ dcroit exponentiellement de
e
1
=0,368, ou 36,8% de sa valeur l'interface air
conducteur.L'expressionestdonneparlarelation(I.10).
6=
1
.
f njc
(I.10)
9
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
avecf frquencedusignal, lapermabilitdel'environnemententourantleconducteur,et la
conductivitduconducteur.L'paisseurdepeauestdoncinversementproportionnellelaracine
carredelafrquenceetdelaconductivit.
Commel'paisseurdepeaureprsenteunesourcedepertesnergtiquescausesparlapropagation
del'ondedanslargionrsistivedelasurface,ilestimportantdelaminimiser.
I.3.2. Lignemicroruban
La ligne microruban (ou microstrip en anglais) se caractrise par un substrat dilectrique
entirementmtallissurunedesesfacesetparunelignemtalliquesurl'autre(Figure.I.5).De
nombreusestudes[I.3] ontmontrqu'unelignemicrorubanpermetlapropagationd'uneondeen
mode quasiTEM (Transverse ElectroMagnetic), c'est dire que les champs magntique et
lectrique sont perpendiculaires l'axe de la ligne (Figure. I.6) et transversaux entre eux, leurs
composanteslongitudinalestantngligeables.
lmentcentraldecettetechnologie,lesubstratsertlafoisdesupportmcaniqueainsiquede
supportdepropagationdeschampsparsescaractristiqueslectriquesquisont:
lapermittivitdilectriquerelativedusubstrat:
r
,
latangentedeperte:tg ,
l'paisseurh
s
dusubstrat.
L'impdance caractristique d'une ligne microruban, pour une permittivit donne, dpend avant
toutdurapportentrelalargeurdelaligneWetl'paisseurdusubstratisolanth
s
.Ilexistedansla
littraturedenombreusesquationsanalytiquesempiriquespermettantdecalculerl'impdancedela
lignepartirdesdonnesgomtriquesouinversementdedterminerlesdimensionsd'uneligne
pouruneimpdancecaractristiquedonne.Lesformuleslesplusprcisespubliesen1975,sont
duesE.O.Hammerstad[I.4].
La ligne microruban associe des substrats tels que le quartz, le durod ou encore l'alumine
montreuneattnuationliniquedomineparlespertesmtalliquesprovenantduruban.Surcetype
detechnologie,lapermittiviteffectivevariedemanireimportanteaveclafrquence,cequiest
quivalent une forte dispersion de l'impdance caracteristique. Ce point est un des principaux
inconvnientsdeslignesmicrorubansauxfrquencesmillimtriques.
10
Figure 1.5: Vue en coupe d'une ligne microruban
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Figure I.6: Lignes des champs E et H d'une ligne microruban
Dans un soucis de confinement de l'nergie, il est impratif que l'paisseur des diffrents
conducteurssoitgaleaumoins4foisl'paisseurdepeau.Pourunelignemicrorubangaleune
seulepaisseurdepeau,36,8%d'unchampincidentvatraverserleconducteur,cequisersume
une fuite d'nergie hors du guide d'onde. Quand l'paisseur du conducteur est choisie 4 fois
l'paisseurdepeau,l'amplitudeduchamptraversantn'atteintplusque1,8%.
I.3.3. Lignecoplanaireetcoplanaireavecplandemasse
Latechnologiecoplanaire(ouCPWenanglais, CoPlanar Waveguide)tiresonnomdufaitquela
lignedetransmissionetsonplandemassesontsitussurlammefacedusubstrat(FigureI.7).Un
desavantagesdecettestructurersidedanslefaitdepouvoirconnecteruncomposantsansavoir
usiner des trous mtalliss (comme dans le cas d'une ligne microruban) travers le substrat en
limitantainsileseffetsselfiques.
L'agencementdesconducteursdelalignefaitapparatredeuxmodesdepropagation:
unmodequasiTEM(FigureI.8.a)ditmodeimpair,
unmodequasiTE(modedefenteoupair)quis'installeentrelesrubansetqu'ilconvientle
plussouventd'liminer(FigureI.8b).
11
Figure I.7: Vue en coupe d'une ligne coplanaire
Figure I.8: Reprsentation des modes d'une ligne coplanaire
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
LemodeTE(FigureI.8b)estgnralementliminenreliantpardesrubansmtalliques(ponts
air)lesdeuxplansdemasseafinquecesdernierssoientportsauxmmespotentiels,cequipermet
d'viterlapropagationdumodefente.Cemodeapparatsurtoutlorsd'unediscontinuitdelaligne
comme un coude ou un changement d'impdance. De nombreuses tudes ont t menes pour
optimiserlesdimensionsetleplacementdecespontsair[I.5].Ellesmontrentnotammentquela
formeducouden'apasd'effetsurlaqualitdelatransmission,alorsquelalargeuretlahauteurdes
pontsairontunegrandeinfluencesurlespertesd'insertionetlecoefficientderflexion.
L'intrtdelalignecoplanairersidedanslefaitqu'elleprsenteunedispersionmoinsimportante
quelalignemicroruban.Deplus,lorsquelesdimensionstransversessontpetitesparrapport,les
pertes par rayonnement sont faibles et la ligne centrale prsente une attnuation linique
comparableauxlignesmicroruban.
L'influencedel'paisseurdemtallisationparrapportl'paisseurdepeauestmoinsimportante
sur cette technologie car comme on peut voir sur la figure I.8.a, la plupart des champs electro
magntiquesnerencontrentpasleplandemassedemanireorthogonale.
Un dernier avantage provient du fait que l'impdance caractristique dpend du rapport entre la
largeurdelalignedesignalWetl'espaceGentrecetteligneetlamasse.Ilestainsipossiblequelle
que soit l'chelle de taille souhaite, de choisir la valeur de l'impdance caractristique
(contrairementauxlignesmicrorubans).
Dans le cas d'un substrat dilectrique fin ou fragile (comme l'AsGa) ou pour des contraintes
d'vacuationthermiquedanslecasdecomposantsactifs,onpeuttreamenajouterunplande
massesurlafacedusubstratopposeauxlignescoplanaires(FigureI.9),onparleraalorsdeGCPW
(groundedCPW).Danscecas,ilconvientdefaireattentionl'apparitiond'unnouveaumodede
propagation entre les lignes coplanaires et le plan de masse [I.6]. Si ce mode n'est pas pris en
compte lors de la conception de la ligne, les lignes de transmission peuvent souffrir de pertes
importantesdueslarsonancedecemodeparasite.Denombreusesmthodesonttproposes
pourdtruirecemodecommelagravuredemotifssurleplandemasse[I.6].
LetableauI.1prsenteunrcapitulatifdespertesd'insertionparmillimtre30GHzsurdiffrents
substrats.Onobservequepluslalignecentraleestfineetpluslespertes(surtoutrsistives)sont
importantes[I.7].Onremarqueaussiquedeslignessurquartzontuneattnuationplusfaibleque
leurquivalentsurAsGa[I.89].Enfin,leslignesGCPWprsententpeuprslesmmespertes
queleslignesCPW[I.10].
12
Figure I.9: Vue en coupe d'une ligne coplanaire avec plan de masse
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Ligne
r
Substrat paisseur
substrat(m)
W
(m)
G
(m)
t(m) Z
0
() S
21
(dB)
Ref
CPW 12,8 AsGa 100 232 84 1,2 50 0,035 [I.7]
CPW 12,8 AsGa 100 69 28 1,2 50 0,07 [I.7]
CPW 12,9 AsGa 500 88 16 1,0 30 0,21 [I.8]
CPW 12,9 AsGa 500 250 25 1,0 30 0,12 [I.9]
CPW 4 Quartz 250 250 25 1,0 50 0,065 [I.9]
GCPW 11,7 Silicium 355 50 125 1,2 73 0,156 [I.10]
Tableau I.1: Comparaison des pertes d'insertion par millimtre 30 GHz pour des lignes CPW
sur diffrents substrats
I.3.4. Influencedusubstrat
LescomposantsRFontinvariablementbesoind'unsupportmcanique.Lanaturedusubstratjoue
unrlemajeursurlesperformancesfinalesducomposantdpos.Unsubstratpeutengendrerdeux
sourcesdeperte,lespertesdilectriquesetlespertersistives.
Lesstructuresplanairessontlargementutilisesdansla conceptiond'antennesactives,ellessont
constitues d'un plan de masse et d'un ou plusieurs substrats dilectriques dont la surface est
recouverte d'une mtallisation en cuivre, en argent ou en or, qui va ainsi constituer l'antenne.
Diffrentesformes d'lments rayonnantssontalors possibles et leursalimentationspeuventtre
effectuespardiversprocds.
Les substrats doivent tre de permittivit faible et d'paisseur leve de faon permettre le
rayonnement, en vitant le confinement des champs lectromagntiques dans la cavit comprise
entrel'lmentimprimetleplandemasse.Lesmatriauxlespluscourantsontdescomposites
basedeTflon(2
r
3ettg 10
4
),depolypropylne(
r
=2,18ettg 3.10
4
)ainsique
desmoussessynthtiquescontenantdeminusculespochesd'air(
r
=1,03ettg 10
3
)[I.11].
Pour les matriaux semiconducteurs comme le silicium (Si,
r
= 11) ou l'arsniure de Gallium
(AsGa,
r
=13), lavaleurdeleurconstantedilectriqueesttrsleveparrapportcelleutilise
pour les antennes imprimes ce qui entrane une diminution de l'nergie rayonne, de la bande
passanteetunebaissedesperformancesdelastructureainsiquedespertesimportantes.
Une tude sur les pertes des lignes de transmissions, a montr que si l'AsGa a un avantage
consquentenbassefrquence,cetavantageserduitversleshautesfrquences[I.12].
I.4. ANTENNESACTIVES
I.4.1. Dfinition
D'une manire trs gnrale, on peut dire que si une antenne subit un traitement actif avant
d'mettre une onde lectromagntique ou aprs rception, elle peut tre appele antenne active.
Cettedfinitionestassezambigecarpresquen'importequelleantennepeuttreconsidrecomme
active partir du moment o les lments actifs sont relativement proches de l'ouverture de
13
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
l'antenne,parexemples'ilssontsurlemmesubstratouunedistanceinfrieureauchampproche
de cette antenne. Pour Itoh [I.13], la dfinition est relative l'utilisateur, pour un concepteur
d'antennes,l'antenneactiveintgreestuneantennecapabled'effectuerdestraitementsdusignal
(mlange,amplification)ettandisquedupointdevued'uningnieursystme,uneantenneactive
intgrepeuttreconsidrecommeuncircuitactifmicroondeol'accsd'entreoudesortieest
l'espace libre plutt qu'une conventionnelle interface de 50 . Cette dfinition montre toute
l'ambigutduproblme.Nousallonsprivilgierlavisiondesconcepteursd'antennes,cequirevient
dfiniruneantenneactiveentirementintgre, commetantuneantennedontlesproprits
radiolectriques sont intimement associes au comportement du ou des lments actifs. Par
exemple, en ajoutant un amplificateur en sortie de l'antenne, mme si cet amplificateur est
proximit du champ de l'antenne, on ne peut pas la considrer comme active puisque le
comportementdel'amplificateurestindpendantducomportementpassifdel'antenne.Al'inverse,
l'ajoutd'unediodevaricappermettradefairevarierlecomportementradiolectriquedelastructure
passive et l'on considrera cette antenne comme active grce au circuit de polarisation continue
(DC)deladiode.
Nousprendronsdonccommedfinitionfinale:uneantenneactivepossdeun(oudes)lment(s)
actif(s) qui ne ralise pas un simple pr ou posttraitement mais qui modifie les proprits
radiolectriquesdel'antenne.
I.4.2. Les antennes actives quasi-intgres et entirement intgres
Ilestclairquilyabeaucoupd'antennesactuellementclassescommeantennesactivesquine
peuventpastomberdanslaprcdentedfinitionetonlesconsidrepluttcommedesantennes
actives partiellement intgres ou quasiintgres. Ainsi, les antennes qui contiennent des
composants actifs, c'estdire n'importe quel composant qui exige une source d'nergie externe,
sont classes comme des antennes actives entirement intgres ou quasiintgres. Si la dite
antenne entre dans lacatgoriedfinie dans le paragrapheprcdent, on peut dire quec'estune
antenneactiveentirementintgre,sinonc'estuneantenneactivequasiintgre.
Afind'illustrercesdfinitions,lafigureI.10reprsenteunemodlisationsymboliquedesdiffrents
typesd'antennesactives.Danscesreprsentations,leTl'intrieurducerclesymboliseleblocde
traitementoul'lmentactif.
14
Figure I.10: Description schmatique d'une antenne passive (a), une antenne
quasi-intgre (b) et d'une antenne intgre (c)
T
T
Antenne passive Antenne active
quasi-intgre
Antenne active
intgre
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.4.3. Intgrationdecomposantsactifs
Les antennes lments imprims ont les avantages des lignes microrubans: faible masse et
encombrement,cotrduitdefabricationparlestechniquesdescircuitsimprims.Ellespeuvent
tre relies directement au dispositif d'alimentation ce qui augmente le degr d'intgration du
dispositif.Cependant,cesantennesprsententquelquesinconvnients:unefaiblebandepassante,
ungainrelativementmoyenetunelimitationdespuissancestransmisesquelquesWatts.C'estici
quel'ajoutd'lmentsactifspeutpermettred'amliorercesantennes.L'intgrationdecomposants
au sein de l'lment rayonnant peut tre ralise en employant des techniques utilises dans la
conceptiondecircuitshautefrquence.
Ilexistedeuxmthodesd'intgrationdecomposants:
MIC:MicrowaveIntegratedCircuits
MMIC:MonolithicMicrowaveIntegratedCircuits
Cestechniquespeuventtreutilissavecdiffrenteslignesdetransmission(microruban,coplanaire,
fente,etc...)[I.14].
I.4.3.1. LatechnologieMIC
LatechnologieMICconsistereporterdescomposantsdiscrets(capacits,diodesPINouvaricap,
FET,MEMS)surlastructurepassive.Sadispositionpeutsefairedediffrentesmanires,suivant
l'antenneemploye(patch,lignefenterayonnante,etc..).Lecomposantpeutseplacersurlasurface
commedanslecasd'unpatchsphriqueenanneau[I.15]oubientraverslesubstratafinderelier
l'lmentrayonnantauplandemasse[I.16].
Lafabricationdescomposantsdiscretsdoitfairel'objetd'uneattentionparticulireafinderduire
leslmentsparasitesintroduitsparlebotier.Atrshautesfrquences,leurfabricationdevientde
plusenplusdlicatecequiprovoquel'augmentationducot.Toutefoiscettetechniqued'intgration
restelaplusutilise,d'unepartgrceauxbonnesperformancesobtenuesparlesantennesactives
conues et d'autre part par la simplicit de fabrication des antennes et de l'intgration des
composantsdiscretsdansledispositif.
I.4.3.2. LatechnologieMMIC
LatechnologieMMICconsisteconcevoiretraliserlescomposantsactifsenmmetempsque
l'lmentrayonnantdemanireobteniruneantenneintgreactivesurunsubstratmonolithique.
Leprincipalavantagedecettetechniquersidedanslarductiondeslmentsparasitesquipeuvent
intervenirhautesfrquencesaveclesconnexionsentrelmentspassifsetcomposantsdiscrets.La
rduction de ces parasites permet d'augmenter les performances de l'antenne active.
Malheureusement cette mthode comporte plusieurs contraintes qui limitent actuellement son
utilisationdansledomainedelaconceptiond'antennes:
constantedilectriquedusubstratlev:silicium(
r
=11)ouarsniuredeGallium(
r
=13).
contrainteauniveaudel'quipement:lafabricationmonolithiques'effectueensalleblanche
l'aide de techniques coteuses. C'est pourquoi la recherche et le dveloppement d'antennes
activesmonolithiquessetrouventfreinsparl'investissementfinancierimportantraliser.
contraintesurl'optimisationdesperformancesdelastructure:unefoisl'antenneralise,ilest
impossiblededplacerlescomposants.Uneffortimportantdoitdonctrefaitdanslaphasede
conception,ncessitantdeslogicielsdesimulationetd'optimisationprcis.
15
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.4.4. Fonctionsdesantennesactives
A partir des deux technologies utilises pour la ralisation d'antennes actives, il est possible de
raliserdiffrentesfonctionspouramliorerlescaractristiquesdesantennespassives.
I.4.4.1. Antennesactivesagilesenfrquence
Lafaiblebandepassantedesantennesimprimesaconduitaudveloppementd'antennespilotables
en frquence. Par l'utilisation de composants discrets intgrs, ces antennes peuvent balayer de
larges bandes de frquences et satisfaire ainsi des applications ncessitant d'importantes bandes
passantesouplusieursbandes.
Afindecaractriserlesperformancesdesantennesactivespilotablesenfrquence,onpeutdfinir
lescritressuivants:
letauxdevariationdelafrquencedefonctionnementestdonnpar
f
min
x100
f
max
lerapportenfrquenceestobtenuenfaisantlerapport
f
max
f
min
la bande passante est obtenue en faisant le rapport
f
max
f
min
f
0
, f
0
tant la frquence de
rsonancedel'antenne.
L'tude de l'influence des composants sur le fonctionnement de l'antenne se fera l'aide des
propritsservantcaractriserlesantennespassives.Labandepassanted'unlmentrayonnant
estdfinieengnralpourunrapportd'ondestationnaire(R.O.S)infrieur2(valeurpourlaquelle
au moins 90% de la puissance est fournie l'antenne), ce qui correspond un coefficient de
rflexion S
11
de 9,54 dB pour une antenne avec un seul port. Ce coefficient nous permet aussi
d'tudierl'adaptationdudispositifenfonctiondelafrquence.
I.4.4.2. Antennesactivespilotablesendirectivit
Il existe trois principales mthodes pour modifier le diagramme de rayonnement. On peut faire
appel des antennes rflecteur et modifier de manire active la caractristique des diffrents
lmentsdurflecteur[I.17].
Unedeuximetechniqueconsistevenirparasiterl'antenneprincipalepardeslmentsplacsdans
sonchampproche.Latechniqueconsisteensuitefairevarierlescaractristiquesradiolectriques
decesparasitespourmodifierlerayonnement[I.18].
Laderniretechniqueexistanteestlamiseenrseaud'antennes.Nousavonsdjrappelquele
gaind'uneantenneimprimeestassezfaiblecarlerayonnementestpeudirectif.Enjuxtaposantces
antennes,nouscronsunrseaud'antennesquiprsentel'intrtd'avoirunplusgrandgainpuisque
lataillelectriquedel'antenneramenelalongueurd'ondeestaugmente.
Lesrseauxpossdentsurtoutl'avantagedepouvoireffectuerdubalayagelectroniquedufaisceau
de rayonnement. L'antenne peut tre commande lectroniquement et pointe successivement
plusieursdirections.
16
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.4.4.2.1. Rseauxd'antenneslinaires
Considronsdeuxlmentsdisposssuivantl'axeY,espacsd'unedistancedetalimentsavecla
mme amplitude et la mme phase. Si on se place dans un systme de coordonnes sphriques
(FigureI.11),lescoordonnesdupointMsontalorsrepresparet.
Figure I.11: Thorme de translation pour deux sources rayonnantes
Lechamp E
2
rayonngrandedistanceparunesourcequiestdplaced'unetranslationdsur
l'axeY,subitunediffrencedephaseparrapportauchamprayonn E
1
danssapositioninitiale
(FigureI.11).Onaalorseneffectuantlasommecomplexedeschamps(I.11).
E
t
(0 ,)=
E
1
(0 ,)+
E
2
(0 , )=A
e
jk r
1
r
1
F
1
(0 ,)+A
e
jk r
2
r
2
F
2
(0 , ) (I.11)
F
i
(0 ,) reprsentelacaractristiquevectoriellederayonnementdel'lmentidurseau
r
i
reprsenteladistanceentrelecentreO
i
delasourceS
i
etlepointM
Pourunrayonnementenchamplointain,r
1
tantpeudiffrentder
2
,ladiffrenced'amplitudepeut
trenglige.Parcontre,letermequiintervientdanslavariationdelaphasedoits'exprimerpar
r
1
r
2
+dsin0 soit:
E
t
(0 ,)=A
e
jk r
2
r
2
(e
jkdsin 0
F
1
(0 ,)+
F
2
(0 ,)) (I.12)
Aupassage,ilestintressantdeconstaterquelerseaunesecomporterapasdelammefaonen
rceptionouenmission,etdonccontrairementtouslessystmespassifs,lorsqu'ilssontmisen
rseau,larciprocitnes'appliqueplus.
17
d
Y
X
Z
direction de rayonnement
r
1
r
2
O
1
O
2
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Considrons maintenant un rseau N lments identiques disposs suivant l'axe Y o tous les
lmentssontespacsd'unedistancedetsontalimentsaveclammeamplitudeetlammephase
(FigureI.12).
Figure I.12: Systme de coordonnes et rseau 6 lments quidistants
D'aprslethormedesuperposition,onpeutdterminerlechamplectriquetotalrayonnparun
rseau de N lmentsen un pointM, eneffectuant la somme vectorielle deschamps complexes
misparchaquesource,soit:
E
t
(0 ,)=
i=1
N
E
i
(0 ,)=A
i=1
N
e
jk r
i
r
i
F(0 , )=A
e
jk r
r
F(0 , )
i=1
N
a
i
e
j( i1)kdsin 0
(I.13)
Sionpose:
FR=
i=1
N
a
i
e
j(i1)kdsin 0
(I.14)
oFRestappellefacteurderseau.
Leproduit
F(0 , ). FR devientalorslacaractristiquevectoriellederayonnementdurseau.
Ontraceleplussouventdemanirenormaliselemoduleduchamp
E
oudesescomposantes
E
et E
. Le diagramme de rayonnement est alors trac en dcibel (dB) car les chelles
logarithmiques permettent entre autres une meilleure visualisation des lobes secondaires. La
puissanceenvoyedansladirection( , )estgale:
p(0 ,)=
F
0
(0 ,). FR
2
(0 ,). FR
2
p
max
(I.15)
op
max
reprsentelavaleurmaximaledelapuissancerayonneparunitd'anglesolide.
18
d
Y
X
Z M
m
O
1
O
2
O
3
O
4
r
^
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Un exemple de diagramme de rayonnement pour un rseau 16 lments rayonnants de faon
isotropeespacsde0,5 (sourceisotrope) placs suivantYavecuneloid'alimentationuniforme
(a
i
=1,
i
=0)estdonnsurlafigureI.13.
Commenousavonsprisdessourcesisotropes,lediagrammederayonnementdurseauestgalau
moduledufacteurderseau.
Figure I.13: Diagramme de rayonnement pour le plan = 90
Danslecasd'uneantennedirectivecommeunrseau,lesdiagrammesderayonnementprsentent
un maximum que l'on nomme lobe principal. Les autres maxima locaux sont appels les lobes
secondaires.
Lalargeurangulairedulobeprincipalestgnralementdfiniepourunaffaiblissementde3dB,
cequicorrespondmipuissance.Onmesurel'importancedeslobessecondairesparladiffrence
endBentreleniveaudulobeprincipaletceluidulobesecondairelepluslev.Onparlealorsde
niveaudelobessecondaires.
I.4.4.2.2. Balayagelectroniquedufaisceau
L'apparitiondedphaseurssuffisammentfiablesdanslesannessoixanteapermisdedvelopper
desantennesrseauxbalayagelectronique.Pourcela,ilsuffitd'intercalerdesdphaseursdansles
lignesd'alimentationsdechaquelmentdurseauetd'instaurerentreeuxuneloiprogressivede
phasedelaformesuivante:
o
i
=(i1)Ao (I.16)
o estuneconstante.
Ainsi, le diagramme de rayonnement prsente un maximum pour la direction reprsente par
l'angle:
0
0
=arcsin
Ao
kd
(I.17)
19
80 60 40 20 0 20 40 60 80
50
45
40
35
30
25
20
15
10
5
0
Angle thtaendegrs
A
m
p
l
i
t
u
d
e
e
n
d
B
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Onobtientparexemplepourlerseauprcdentundplacementde19,1dulobeprincipalpour
unediffrencedephase=60(figureI.14).
Laconditionsurladistancedinterlmentsdesuppressiondeslobesd'ambiguts(oulobesde
rseau)dansledemiespace[0,90]estdonnepar:
d=
\
1 +sin0
0
(I.18)
Lalargeurdufaisceau3dBestdonnepar:
0
3dB
=
\
Lcos0
(I.19)
oLestlalongueurtotaledurseau.
Figure I.14: Dcalage du maximum de rayonnement avec = 60
I.4.4.2.3. Antennesactivesreconfigurablesenpolarisation
La polarisation d'une onde lectromagntique est dfinie comme tant la proprit qui dcrit la
variationdeladirectionetl'amplitudeduvecteurdechamplectriqueenfonctiondutemps.En
considrant une onde plane se propageant dans la direction z, on observe le comportement du
champ
E dansleplanO
xy
enfonctiondutempscommesurlafigureI.15.
Silechamplectriquenesedplacequesurl'axex,l'ondeestditepolariselinairementdansla
directionxetlechamplectriqueestdonnpar:
E=E
xO
sin(ot z)
x (I.20)
20
80 60 40 20 0 20 40 60 80
50
45
40
35
30
25
20
15
10
5
0
Angle thtaendegrs
A
m
p
l
i
t
u
d
e
e
n
d
B
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Onparleraaussidepolarisationlinairehorizontale.
De manire similaire, une onde avec un champ lectrique uniquement dirig selon l'axe y est
polarisationlinaireverticale.
D'unemaniregnrale,lechamplectriqued'uneondesepropageantdansladirectionzauraune
composante
E
x
selonl'axexet
E
y
selonl'axey.Danscettesituation,l'ondeaunepolarisation
elliptiquequis'exprimepar:
E=E
x0
sin(ot z)
x+E
y0
sin(ot z+0)
y (I.21)
tantledphasageentrelacomposantexety.
Lespolarisationslinairesetcirculairesnesontquedescasextrmesdelapolarisationelliptique.
Pourobtenirunepolarisationcirculairegauche,ilfaut: E
x0
=E
y0
et 0=90 ;
pourunepolarisationcirculairedroite,ilfaut: E
x0
=E
y0
et 0=90 .
Lessystmesdetlcommunicationutilisentdiffrentstypesdepolarisation.Cependant,laplupart
des communications terrestres ont recourt la polarisation linaire. Dans les applications
satellitaires,lapolarisationcirculaireestprfrecarelleestmoinssensibleladpolarisationlors
dupassagedansl'atmosphre.
Dans le cas de communications entre plusieurs utilisateurs dans un espace confin, il peut tre
intressantd'utiliserdiffrentespolarisationscommel'amontrKujiwaraen1995[I.19](diversit
depolarisation).
21
Figure I.15: Polarisation des ondes lectromagntiques
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Oncomprendmieuxl'intrtdelacommunautscientifiquepourdesantennesreconfigurablesen
polarisationpours'adapterauxdiffrentessituations.
I.5. CONTEXTEDUTRAVAIL
I.5.1. InvestissementderechercheEurope/EtatsUnis/Asie
Nousallonsdansceparagraphenousintressersurtoutauxinvestissementsderecherchedansle
domaineassezrcentdesmicrosystmes.Cethmederecherchesembletreleplusprometteuren
termedecomposantactifhyperfrquencedufutur.
L'approcheauniveaudelarecherchesurlesmicrosystmesesttrsdiffrentedanslestroisgrandes
rgionsdumondequesontl'Europe,lestatsUnisetl'Asie.
Aux Etatsunis, les budgets militaires ont donn une trs large impulsion au dveloppement des
microsystmes et de nombreuses startup (Radant, XCOM, Wispry, Teravicta, MEMtronics,
MicroAssembly...)ontprislerelaisetmnentdsormaisl'innovationdanscesecteur.
EnAsie,degrandsgroupescommeLGE,Samsung,Fujitsu,Matsushitaontprisleurchargela
recherche dans ce domaine. Des tats, comme la Core du Sud, subventionnent des projets trs
ambitieuxderecherchesur5ans.
SurlafigureI.16,onpeutvoiruneestimationdesinvestissementsderechercheenfonctiondes3
continentsen2004[I.20].
Levieuxcontinent,endehorsdudomainedesrsonateursBAW,estlargementlatraneentermes
d'investissementetderecherche.EnEurope,iln'existequetrspeudestartupdansledomainede
MEMSRF.NouspouvonsciterlasocitMEMScapenFrancebienqu'aujourd'huil'essentieldeses
activits soit aux tatsunis. Les socits Silmag et PHSMEMS ont quant elles arrt leurs
22
Figure I.16: Estimation des investissements de recherche dans les microsystmes en 2004
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
activits. Seuls les laboratoires acadmiques continuent de travailler dans ce domaine: LAAS,
IRCOM,IEMN,ESIEEetMINATECH,pournenommerquelesprincipaux.
I.5.2. LeLEATetlesantennesactives
Le Laboratoire d'Electronique, Antennes et Tlcommunications de l'Universit de NiceSophia
Antipolis(UMRCNRS6071)auneexpriencereconnuedansledomainedesantennesactives.Un
brefrsumdcrivantquelquesralisationsestprsentdansceparagraphe.
I.5.2.1. Antennescontinuementpilotablesenfrquence
Unpremiertyped'antenneatralisaulaboratoireenpermettantlebalayagedelafrquencede
fonctionnement.Eneffet,sachantquetoutlmentrayonnantpeuttremodlisparuncircuitRLC
autour de sa rsonance, une modification de la capacit quivalente entrane une translation en
frquencedecettersonance.Ladiodevaricapchoisiepermetunevariationdelacapacitdel'ordre
de1pf5pfdanslesbandesdefrquenceschoisies[I.21].
Lesantennesayantdepetitesdimensionsetsurtoutunprofilrduitsontlesplusappropriespour
une utilisation sur les metteurs/rcepteurs mobiles (GSM900, DCS1800, UMTS, WLAN,
Bluetooth, WIFI...). Parmi toutes les structures d'antenne existante, la PIFA (Printed Inverted F
Antenna)estuneantenneminiaturesouventutilisepourcouvrirunouplusieursdecesstandards.
Bienquecetyped'antennesoit gnralementalimentparsondecoaxiale,nousprsentonssurla
figure I.17 un prototype o l'alimentation coaxiale est remplace par une alimentation de type
coplanairetermineparuncircuitouvert.Cecipermetd'avoirdeuxzonespossiblespourvhiculer
lapolarisationcontinue.L'insertiond'unediodevaricapentrel'mecentraledelalignecoplanaire
et l'lment rayonnant permet ensuite le pilotage en frquence (Fig. I.17). La tension continue
ncessairelapolarisationestacheminesimultanmentaveclesignalhyperfrquencevhiculpar
leguided'ondecoplanaire.Lapositiondeladiodeetlalongueurdustubencircuitouvertontt
optimissafind'obteniruncoefficientderflexionminimal[I.22].
L'antenne initiale a une frquence de rsonance de 4,74 GHz. Aprs connexion de la diode, la
frquence de rsonance diminue lgrement 4,19 GHz. La polarisation de celleci avec une
23
Figure I.17: Pav court-circuit aliment par CPW et charg par une diode varicap
Ligne coplanaire
Plan de masse
Pav
Court-circuit
S
g
L
Substrat
Diode varicap
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
tensionvariantde025voltspermetd'obtenirunedynamiquedefrquencede320MHz(7,3%de
4,194,52GHz)avecunebandepassanteconstanteminimalede70MHz.
D'autresantennes avecinsertiondediodesvaricapsonttralisesaulaboratoire, savoirune
antennedipleasymtriqueetuneantennedetypeS[I.23].
I.5.2.2. Antennespilotablesparcommutation
Uneautrestructurecomposed'unpatchrayonnantcouplunefenteencircuitouvertalimente
paruneligneCPWestdcritefigureI.18[I.24].Danscetyped'excitation,lechampestconcentr
principalementaucentredelafenteetsesextensionslatralessecomportentenfaitcommedes
inductancesderglageenfrquencedontlalongueurl
e
affectepluslafrquencequelecoefficient
derflexion.
DeuxdiodesPINonttinsresdanscettefentedemaniresymtriqueafindecontrlerlataille
quivalentehyperfrquencedecelleci.Lorsquelesdeuxdiodessontpassantes,ellessecomportent
essentiellementcommedescourtcircuitsquirduisentalorsphysiquementlalongueurdelafente.
Lorsqu'elles sont bloques, cette longueur est quasiment inchange par rapport l'antenne de
dpart. Cette antenne permet d'obtenir deux frquences de travail. La largeur de la fente est
optimisepourutiliserlafoisdesdiodesdetypebeamleadetminimiserlerayonnementarrire.
Afin d'obtenir le dcouplage de la polarisation continue, des fentes trs fines (d'isolation et de
polarisation)prolongentlafentededcouplage.
Unautreexempled'antennepiloteparcommutationestprsentsurlafigureI.19.Ils'agitd'un
lmentdetypefentealimenteparguided'ondecoplanaire[I.25].HuitdiodesPINplacessurles
fentes permettent de raccourcir, lorsqu'elles sont polarises dans un tat passant, la longueur
rayonnantelectriquedel'antenne.Commesurl'antenneprcdente,detrsfinesfentespratiques
dansleplandemassepermettentundcouplagedespolarisationscontinuesdecommandedusignal
RF.
Lorsquelesdiodessontpolarises,doncquivalentesdescourtscircuits,defaonsymtrique(par
exemplediode1etdiode8),lalongueurrayonnantedel'antenneestrduite,entranantundcalage
de la frquence de fonctionnement vers les frquences suprieures. Si toutes les diodes sont
passantes,lafrquencedersonanceobtenueestmultiplied'unfacteur2,68parrapportcelleo
l'antenneatoutessesdiodesencircuitouvert.
24
Figure I.18: Antenne saut de frquence
Diodes PIN de
type beam lead
Fentes troites
d'isolation de
polarisation
le
Ligne coplanaire
Plan de masse
Pav rayonnant Substrat
Fente
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.5.2.3. Antennesreconfigurablesenfrquenceaveccomposantsmicrosystmes
Le LEAT a t un des premiers laboratoires, en collaboration avec le CEA LETI, intgrer un
composant microsystme sur une antenne PIFA [I.26]. Une fente est ajoute dans l'lment
rayonnantprincipalpourdiminuerlafrquencedefonctionnementdesmodesrsonnantssuprieurs
(Figure I.20.a). La longueur de cette fente peut tre modifie en courtcircuitant celleci
diffrentespositions.Enplaantuncourtcircuit0mmdelafenteenformedeL,oncreune
rsonanceen /2autourde2GHz,deplusceladplaceletroisimeetlecinquimemodeversles
hautesfrquences(2,5GHzpourletroisimemode).
LafigureI.20.bmontrelesrsultatssimulspourdiffrentespositionsducourtcircuitlelongdela
fente(0,32,44millimtres)surlaPIFAencoches.Ainsilesdiffrentsmodesdefonctionnement
prsents peuvent tre adresss par cette antenne reconfigurable en frquence. Afin dintgrer
efficacement et de faon raliste des commutateurs microsystmes dans le modle, la PIFA
reconfigurableatsimuleenprenantencomptelescircuitsdepolarisationducomposant.
I.5.3. Collaborationsscientifiques
Durant cestravauxde recherche, nousavonseu desrelationsprivilgiesavecdeuxlaboratoires
trangers.LelaboratoirehyperfrquencedelaQueen'sUniversityofBelfastetleradiolaboratory
del'universitd'Helsinki.
25
Figure I.20: (a) Vue 3D de l'antenne (b) Simulations et mesures des rsonnances en fonction de la
position du court-circuit
Figure I.19: Antenne 5 frquences commutables
Plan de masse
Isolation
Ligne d'alimentation
coplanaire
1 3 4 2
Diodes PIN
5 7 8 6
Diodes PIN
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
I.5.3.1. TheInstituteofElectronics,CommunicationsandInformationTechnology,
QueenUniversityofBelfast
Cettethses'estdrouleencollaborationavecl'ECIT(InstituteofElectronics,Communications
andInformationTechnology)delaQueensUniversityofBelfast.
Le directeur du laboratoire hyperfrquence, Vincent Fusco, est un chercheur internationalement
reconnudansledomainedescircuitsradiofrquences.IlapassunmoisauLEATenqualitde
professeurinvit.
Ilestnotammentl'auteurd'articlessurlescoupleurshybridesquasidiscretsquisontlabasede
nombreusestudesdecettethse[I.27]et[I.28].
I.5.3.2. RadioLaboratory,HelsinkiUniversityoftechnology
L'quipeantennesactivesduRadioLaboratoryestdirigeparleprofesseurPerttiVainikainen.
Ce laboratoire a men de nombreuses tudes dans le domaine des antennes multibandes pour
terminauxportablesetdessystmesmultibandespourdesapplicationsdediversitetdessystmes
MIMO(entremultiple,sortiemultiple).L'objectifdelacollaborationtaitdeconcevoirunrseau
d'antennes60GHzavecbalayagelectroniquedufaisceau. Nousavonschoisiunetechnologie
MMIC integr sur Silicium base de microsystmes. Un doctorant effectuant une thse en co
tutelleentreleLEATetleurlaboratoire,SylvainRanvier,apassuneanneauseinduLEATpour
laconceptiondecerseaud'antennes.Nousavons,denotrecot,conulessystmesdphaseurs
basedecommutateursMEMS.
I.6. CONCLUSION
Cechapitreafaitl'objetd'unrappelhistoriquesurlesantennes.Nousavonsensuiteprsentles
conditionsdanslesquellesseferanotretravail. Lanotion d'antenne activeatdfinie,puisles
diversesfonctionsdereconfigurabilitonttprsentes.Enfin,nousavonssitunotretravaildans
soncontextescientifique.
Ledeuximechapitreseraconsacrl'tatdel'artdesdiffrentestechnologiesquiserontutilises
danscettethse,pourrendrereconfigurableuneantenne.
26
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
Rfrences du Chapitre I
[I.1]BalanisA.C.Antennatheory,analysisanddesign,HarperandRow,1982.
[I.2]GonzalesG.,Microwavetransistoramplifiers,AnalysisandDesign,EnglewoodCliffs,NJ:Prentice
Hall,1984.
[I.3]BahlI.J.,BhartiaP.MicrostripantennaArtechhouse,1982.
[I.4] HammerstadE.O.,EquationsforMicrostripCircuitDesign,EuropeanMicrowaveConf.,pp.268
272,Hamburg,Germany,1974.
[I.5]OmarA.A., ChowY.L., RoyL.andStubbsM.G., Effectsofairbridgesandmiteringoncoplanar
waveguide90bends:theoryandexperiment,IEEEMTTSdigest,pp.823826,1993.
[I.6]R.N.Simons,CoplanarWaveguideCircuits,Components,andSystems,WileyInterscience,2001
[I.7] ZhangM.,WuC.,WuK.,andLitvaJ.,LossesinGaAsMicrostripandCoplanarWaveguide,in
1992lEEEM7TSDig.,pp.971974.
[I.8]HaydlW.H.,BraunsteinJ.,KitazawaT.,SchlechtwegM.,TaskerP.,andEastmanL.F.,Attenuation
ofmillimeterwavecoplanarlinesongalliumarsenideandindiumphosphideOvertheRange160GHz,in
1992IEEEMmSDig.,pp.349352.
[I.9]HaydlW.H.,HeinrichW.,BoschR.,SchlechtwegM.,TaskerP.andBraunsteinJ.,Designdatafor
millimeterwavecoplanarcircuits,inI993EuropeanMicrowaveConf.,pp.223228.
[I.10] Weller T. M., Katehi L. P. B., Rebeiz G. M., Performance microshield line components, IEEE
TransactionsonMicrowaveTheoryandTechniques,Vol.43,No.3,March1995.
[I.11]CombesP.,Microondes,lignes,guidesetcavits,EditionDunod,1991.
[I.12] ChanR.,LesnickR.,CaruthD.,FengM.,UltrabroadbandmicrosystmesswitchonSiliconand
GaAssubstrates,Proc.GaAsMANTECHConferenceDigestofPapers,Vancouver,Canada,2002.
[I.13] ItohT., ActiveIntegratedAntennaforWirelessApplications MicowaveConferenceAsiaPacific,
pp.309312,April1997.
[I.14] Navarro J.A, Chang K., Integrated active antennas and spatial power combining, A wiley
intersciencepublication.JohnWiley&sons,inc.
[I.15]HongC.S.,Smallannularslotantennawithcapacitorloading,ElectronicsLetters,Vol.36,No.2,
pp110111,January2000.
[I.16]LiangM.C,KuoY.L,YenY.M,LaiW.C,Capacitorloadedfrequencycontrolschemeforcircular
patchantenna,ElectronicsLetters,Vol.36,No.21,pp17571758,October2000.
[I.17] LegayH.;PinteB.;CharrierM.;ZiaeiA.;GirardE.;GillardR.,Asteerablereflectarrayantenna
withMEMScontrols,PhasedArraySystemsandTechnology,2003.IEEEInternationalSymp.,pp494
499,1417October2003.
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreI:Dfinitionetgnralits
[I.18] Vaughan, R., Switched parasitic elements for antenna diversity, IEEE Trans. on Antennas and
Propagation,Vol.47,Iss.2,pp:399405,February1999.
[I.19]KajiwaraA.,LineofSightIndoorRadioCommunicationUsingCircularPolarizedWaves,IEEE
TransactionsonVehiculartechnology,vol.44,No.3,pp.487492,August1995.
[I.20]WTC,RFMEMSmarketreport,October2005.
[I.21]MA4ST560L120,MA/COMcompany
[I.22] TurkiY.,StarajR., CPW fed frequencyagileshortedpatch,Microwaveand opticaltechnology
letters.Vol.25,No.5,pp.291294,April2000.
[I.23] Laheurte J.M, A switchable CPWfed slot antenna for multifrequency operation, Electronics
Letters,Vol.37,p.14981500,December2001.
[I.24]LuxeyC.,DussoptL.,LeSonnJ.L.,LaheurteJ.M.DualfrequencyoperationofaCPWfedantenna
controlledbyPINdiodes,ElectronicsLetters,Vol.36,No.1,pp.23,January2000.
[I.25]LaheurteJ.M.SwitchableCPWfedslotantennaformultifrequencyoperation,ElectronicsLetters,
Vol.37,No.25,pp.14981500,December2001.
[I.26] PanaaP.,LuxeyC.,JacquemodG.,StarajR.,PetitL.,DussoptL., Multistandardreconfigurable
PIFAantenna,MicrowaveandOpticalTechnologyLetters,Vol.48,Iss.10,pp:19751977,October2006.
[I.27]O'CaireallainS.B.D.,FuscoV.F.,Quasilumpedelementquadraturecouplerdesign,Microwave
andopticaltechnologyletters,Vol.2,No.6,June1989.
[I.28]FuscoV.F., Tuningquasilumpedelementquadraturehybrid,ElectronicLetters,Vol.27,No.24,
pp.22462248,November1991.
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Chapitre II
ETAT DE L'ART
ans ce chapitre, un tat de l'art est prsent sur les diffrents
thmes abords dans ce travail de thse. Nous nous intresserons
successivement aux microcommutateurs diodes PIN, MEMS,
puis aux varactors, aux coupleurs hybrides et aux dphaseurs, pour terminer
sur plusieurs exemples d'antennes actives.
D
La fin du 20
me
sicle montre une volution majeure dans le domaine des
radio-frquences (RF) et des tlcommunications [II.1-2-3]. En effet, les
besoins croissants de transmission de l'information et de la parole ont
apport de nouveaux dfis, et notamment le dveloppement de technologies
plus performantes et intgrables afin de fournir des fonctionnalits RF
toujours plus nombreuses dans un espace toujours plus rduit. Un effort
important a donc t effectu sur la recherche et le dveloppement de
circuits intgrs RF base de technologies submicroniques sur substrat
semi-conducteur. Enfin une nouvelle technologie base sur les techniques de
fabrication microlectronique a apport des solutions l o les structures
semi-conductrices avaient montr leurs limites. Les microsystmes ou
MEMS (MicroElectroMechanical Systems) et plus particulirement les
switchs ou microcommutateurs "MEMS RF" (microsystmes pour les
tlcommunications RF) ont pris une importance croissante durant les dix
dernires annes dans la recherche mondiale.
Dans la premire partie de ce chapitre, nous tudierons le principe de
fonctionnement des diffrents composants actifs RF qui peuvent tre
intgrs au plus prs ou sur une antenne. La deuxime partie sera consacre
aux systmes RF reconfigurables grce aux lments dcrits prcdemment.
II.1. Composants actifs de commutation..................................... 30
II.2. Capacits variables.............................................................. 47
II.3. Circuits passifs et actifs........................................................51
II.4. Antennes actives.................................................................. 60
II.5. Conclusion........................................................................... 75
29
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
II.1. COMPOSANTS ACTIFS DE COMMUTATION
II.1.1. Commutateurs lectroniques base de matriaux semi-conducteurs
II.1.1.1. Diode PIN
Les commutateurs diode PIN (Positif - Intrinsque - Ngatif) sont les commutateurs
radiofrquences les plus rpandus. Commercialise depuis la fin des annes 1950, la diode PIN est
capable de commuter en un laps de temps trs bref, du mme ordre que celui des transistors
(quelques dizaines de nanosecondes). Ces diodes peuvent faire transiter des signaux ayant des
niveaux de puissances faibles (quelques milliwatts), ainsi que des niveaux de puissances leves
suprieures au kW, des frquences beaucoup plus basses. De plus, elles sont disponibles dans
plusieurs configurations SPNT, Single Pole N Throw (une entre, plusieurs sorties).
(a)
(b)
Figure II.1: (a) Schma d'une diode PIN (b) Rpartition des densits volumiques des charges et des
champs lcriques
En comparaison avec une diode classique P
+
N, la diode PIN possde une rgion centrale o le
champ lectrique est constant (Figure II.1.b). Cette zone intrinsque est lectriquement neutre. Le
champ lectrique est trapzodal en l'absence de polarisation. La qualit de la diode PIN est
fortement dpendante de la qualit de cette zone intrinsque. Cette diode a la particularit de
pouvoir jouer le rle dinterrupteur grce deux proprits de sa structure: en polarisation inverse
le signal est rflchi, en polarisation directe il passe. On peut extraire de ce composant un schma
quivalent simplifi pour les deux modes de fonctionnement (Figure II.2). Dans le cas de la
polarisation directe, la rsistance srie peut descendre en dessous de 1 . En polarisation inverse, la
rsistance Rp peut monter jusqu' plusieurs k et la capacit C
T
descend sous les 0,1pF. L
reprsente l'inductance srie parasite due aux connexions. Elle est de l'ordre de 1nH.
30
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a) (b)
Figure II.2: Schma quivalent simplifi en polarisation directe (a) et en polarisation inverse (b)
II.1.1.2. Transistor MESFET
MESFET est l'acronyme de "MEtal-Semiconductor Field Effect Transistor". La structure est base
sur la jonction Schottky entre un mtal et un semi-conducteur. La largeur du canal est module par
la variation de la largeur de la zone d'espace de la diode shottky (Figure II.3). Les MESFETs sont
gnralement fabriqus sur des matriaux semi-conducteurs avec une haute qualit de passivation
comme l'AsGa, l'InP, ou le SiC, et sont plus rapides mais aussi beaucoup plus chers que les JFET
ou MOSFET bass sur une technologie silicium. Les MESFETs industriels peuvent oprer jusqu'
40 GHz, et sont communment utiliss dans les systmes radio-frquences.
Le MESFET diffre de son cousin le FET grille isole par le fait qu'il n'y a pas de matriau
isolant entre le mtal et le semi-conducteur. Ses principaux avantages sont l'absence de stockage
des porteurs minoritaires et la longueur du canal trs rduite, infrieure au micron. La diode
Schottky doit tre polarise en inverse pour viter toute fuite de courant.
31
Figure II.3: MESFET en vue symbolique
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
II.1.2. Commutateurs MEMS
II.1.2.1. Dfinition, avantages et inconvnients
Les MEMS (Micro Electro Mechanical System) sont des dispositifs lectromcaniques de taille
micromtrique. Ces systmes sont fabriqus partir de techniques de lithographie, dpt et
gravure, bien matrises aujourdhui, grce au savoir-faire acquis en microlectronique.
Bien que les premiers dispositifs MEMS aient t conus vers la fin des annes 1970 par Petersen
[II.4], la plupart des dveloppements pour des applications RF sont apparus 30 ans plus tard en
raison de manque de maturit des technologies de ralisation.
Les commutateurs MEMS radiofrquences utilisent un mouvement mcanique qui permet d'obtenir
un court-circuit ou un circuit ouvert dans une ligne de transmission RF. Ils sont conus pour
fonctionner dans une bande de frquences allant de 0,1 GHz 500 GHz. Le principe de
fonctionnement des MEMS repose sur un mouvement mcanique de l'ensemble, rgi par les lois de
l'lectrostatique, de la magntostatique, de la pizo-lectricit ou de la thermodynamique. De nos
jours, l'actuation de type lectrostatique est la technique privilgie du fait de l'absence de
consommation et de la facilit de ralisation.
Ces composants se distinguent en termes de performances de leurs homologues semi-conducteurs
(diodes PIN et transistors MESFET). Les principaux avantages des MEMS sont [II.5]:
une trs faible consommation de puissance dans le cas de l'actuation lectrostatique (10-
100nJ/cycle),
un grand pouvoir d'isolation l'tat bloqu pour les MEMS srie, et cela jusqu' de trs
hautes frquences (40 GHz), ces composants tant fabriqus avec des "gaps" d'air
entranant de trs faibles capacits,
des niveaux d'intermodulation trs faibles (IP3 +60 dBm) conduisant des
comportements fortement linaires,
de faibles pertes d'insertion l'tat passant de l'ordre de -0,1 dB au del de 40 GHz,
une fabrication simple, base sur des techniques de micro-usinage pouvant s'appliquer
une grande varit de substrats (quartz, verre, pyrex) et donc non-limite aux seuls
matriaux semi-conducteurs.
En contrepartie, de nombreux aspects des ces composants doivent encore tre ameliors,
notamment sur:
la tension d'actuation pour l'activation lectrostatique, comprise entre 10 V et 80 V. Une
activation thermique permet de travailler des tensions de l'ordre de 5 V [II.6 -II.7] mais
au prix d'une consommation leve (quelques centaines de mW),
le temps de commutation, entre 2 et 40 microsecondes, qui est largement suprieur aux
diodes PIN et MESFETs,
la fiabilit en cycles de fonctionnement (le nombre de commutations avant rupture).
Actuellement, les MEMS sont capables d'atteindre le milliard de cycles [II.8]. Ce
nombre est insuffisant pour des applications dans les antennes rseaux commande de
phase o les nombres de cycles sont compris entre 10 et 100 milliards [II.9],
la mise en botier, plus connue sous le terme anglais de packaging. Comme ces
composants sont trs sensibles leur environnement extrieur (perturbations
lectromagntiques, humidit), ils doivent tre encapsuls. Ce botier, gnralement
usin dans du silicium, est donc plac au-dessus du MEMS. Cette tape supplmentaire
vient alors augmenter le cot de fabrication.
Afin de rsumer les diffrents points prcdents, le tableau II.1 fait une comparaison entre les
diffrentes technologies de commutateurs RF [II.10].
32
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
MESFET Diode PIN EMR(PCB) MEMS RF
Rsistance sries ()
3 5 1 0,1 0,1
Pertes 1 GHz (dB) 0,5 1 0,5 1 0,5 0,1
Isolation 1 GHz (dB) 20 40 40 40 > 40
IP3 (dBm) 40 60 30 45 60 > 70
Point de compression
1dB
20 35 25 30 35 > 33
Taille (mm) 0.01 0.01 10 < 0,1
Temps de
commutation
5 ns 10-100 ns 6 ms 0,2-100us
Tension de contrle 3 5 V 3 5 V 3-24V 3 50 V
Courant de contrle
< 10 A
10 mA 100 mA
< 1 A
Performances en
frequence
20 GHz 40 GHz 6 GHz >100 GHz
Possibilit
d'integration
lev lev faible lev
Cot de revient 1 1-5 30-100 1
Tableau II.1: Comparaison entre diffrentes technologies de commutateurs RF
Ce tableau montre que les microcommutateurs MEMS ont de meilleures caractristiques que leurs
quivalents semi-conducteurs (diode PIN, transistor MESFET) sauf pour la tension de contrle et le
temps de commutation. Les EMR (Electro-magnetic relay), relais lectromagntiques non-intgrs,
ont des performances proches des MEMS mais leur taille importante et leur cot prohibitif rend
impossible toute intgration dans des produits de grande consommation.
II.1.2.2. Architectures srie ou parallle des MEMS
Il existe deux configurations de commutateurs de type MEMS: les commutateurs sries et
parallles.
.1.2.2.1. L'architecture srie
Le principe du MEMS srie est l'architecture la plus intuitive, il consiste interrompre la
connexion physique de la ligne de signal entre l'entre et la sortie RF du commutateur. Dans le cas
o la continuit lectrique est interrompue, le signal est rflchi vers la source. Si la continuit
lectrique est tablie, le signal sera transmis.
33
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
La configuration la plus simple des MEMS sries est appel "cantilever" ou poutre en franais. Elle
utilise un actionnement dans le mme plan que la ligne de transmission (Figure II.4). Le principe de
fonctionnement est le suivant: l'tat de repos, c'est--dire lorsque la poutre est l'tat haut,
correspond l'tat bloqu o le signal ne passe pas. Pour rendre actif le composant, il faut obtenir
une dformation de la membrane mobile. Il convient alors de convertir un signal de commande
lectrique en un dplacement mcanique. Le fait d'appliquer une tension continue d'une certaine
valeur entre l'lectrode d'actuation et la membrane mobile, va crer une force lectrostatique entre
les deux plaques et gnrer ainsi un dplacement de la membrane suprieure jusqu'au contact.
Il existe d'autres types d'architectures de MEMS sries dont l'actionnement consiste placer une
ligne perpendiculaire la ligne de transmission avec deux points d'ancrage ou plus, et plusieurs
lectrodes d'activations [II.11-12-13]. Le principal avantage de cette architecture est sa bande
passante puisque celle-ci ne dpend pas du MEMS mais de la ligne de transmission. Son principal
inconvnient tant que la qualit du commutateur est fortement dpendante de la qualit de la
connexion lectrique au niveau du contact ohmique.
Il est possible de modliser un microcommutateur MEMS de type srie ou parallle par un schma
quivalent lectrique compos d'une capacit, d'une inductance et d'une rsistance qui sont en srie
ou en parallle suivant la structure considre. Dans ce cas, les lments localiss sont en srie
comme le montre la figure II.5 o Rcontact reprsente la rsistance de contact l'tat bas et C la
capacit l'tat OFF, c'est dire lorsque la poutre est suspendue. Avec un contact ohmique Or-Or,
la rsistance srie de contact peut atteindre 0,1.
Le schma reprsent ci-dessus est trs simple et assez gnral. Il existe bien videment des
schmas plus complets qui tiennent compte entre autres des circuits d'activation du
microcommutateur MEMS. Il faut noter qu'il est aussi possible pour un MEMS srie d'utiliser un
34
Figure II.5: Modle reprsentatif d'un microcommutateur ohmique srie
Ligne RF Ligne RF
C
L
R
R
contact
Figure II.4: Architecture classique d'un MEMS srie
Switch l'tat bas
Contact ohmique
Substrat
Switch l'tat haut
g
0
t
d
Substrat
MEMS type poutre (cantilever)
Ligne microruban
Ancrage
Couche de dilectrique
Signal RF d'entre Signal RF de sortie
Electrode d'actionnement
Membrane mobile
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
contact capacitif, dans ce cas, la rsistance de contact sera remplace par une capacit variable sur
le schma quivalent.
.1.2.2.2. L'architecture parallle ou architecture shunt
Cette deuxime architecture utilise la proprit de rflexion d'un signal radiofrquence sur une
ligne de transmission court-circuite. Ainsi le principe sera de connecter la ligne de signal la
masse pour rflchir le signal. Les lignes CPW (CoPlanar Waveguide ou GSG: Ground Signal
Ground) sont privilgies dans ce cas car la ligne de signal et le plan de masse sont sur la mme
face du substrat. Pour transmettre le signal intgralement, il suffira d'ter le court-circuit de la
ligne.
La structure la plus simple est prsente sur la figure II.6. Une membrane mobile est ancre sur les
plans de masse d'une ligne coplanaire. En l'absence de polarisation sur la ligne centrale, le pont est
en position haute ce qui permet de laisser se propager le signal RF sur la ligne coplanaire.
Lorsqu'une polarisation est applique entre la masse et la ligne de transmission, le pont se baisse
par attraction lectrostatique et vient en contact avec le dilectrique dpos sur la ligne centrale.
L'tat bas conduit une mise la masse du conducteur central de la ligne de transmission. Le
dilectrique plac sur la ligne centrale coplanaire au niveau du contact permet d'viter un court-
circuit DC, seul le signal RF est ainsi court-circuit par une forte capacit.
Le schma quivalent d'une telle structure est prsent sur la figure II.7. Il est constitu de deux
sections de lignes d'accs RF, d'un circuit RLC quivalent de la poutre o C est la capacit cre
entre le pont, le dilectrique et la ligne RF, L est l'inductance cre par le pont et R reprsente les
pertes induites par le pont et les lignes. Ce circuit a donc une frquence de rsonance, celle-ci
pourra tre utilise lors de la conception pour amliorer l'adaptation. Dans [II.14], la capacit
l'tat bas est C
b
=2,8pF, la self L=8 pH et la rsistance R=0,2, ce qui donne une frquence de
rsonance l'tat bas de 36 GHz. A l'tat haut, la capacit est C
h
=35 fF, la frquence de rsonance
devient alors 322 GHz. Par consquent, le pont ne joue aucun rle dans nos frquences (<100 GHz)
pour l'tat haut. La capacit C prend donc deux valeurs discrtes qui vont correspondre aux deux
positions de la poutre savoir une valeur l'tat haut et une valeur l'tat bas. Le rapport capacitif
entre l'tat haut et l'tat bas peut atteindre une valeur de 80 pour les meilleurs MEMS [II.15]. Ce
35
Figure II.6: Architecture classique d'un MEMS capacitif parallle
Substrat
Signal RF d'entre
Signal RF de sortie
Tension continue
Substrat
Substrat
Contact capacitif
g
0
t
d
Substrat
Signal RF d'entre
Ligne coplanaire
Couche de dilectrique
Tension continue
MEMS type pont (bridge)
Switch l'tat haut
Switch l'tat bas
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
rapport est dpendant de l'paisseur de la couche dilectrique et de la couche sacrificielle. Dans une
premire approximation en ngligeant les capacits de bord, on peut dduire l'quation (II.1):
C
bas
C
haut
=
e
r
g+t
d
t
d
(II.1)
avec g: distance entre la membrane et la ligne et t
d
paisseur du dilectrique
II.1.2.3. Procd de ralisation
Les procds de ralisation des MEMS sont pour la plus grande part directement emprunts aux
procds microlectroniques. Nous aborderons ici les aspects qui sont spcifiques des ralisations
MEMS comme les couches sacrificielles et la contrainte des membranes relches.
.1.2.3.1. Couches sacrificielles
La particularit principale des MEMS est la mobilit mcanique des structures. Celle-ci n'est pas du
tout naturelle dans un procd micro-lectronique puisque le dpt de couche se fait en sandwich et
donc toutes les couches sont unies les unes aux autres.
Pour permettre de librer une membrane mcanique, il convient alors de dposer une couche
particulire qui sera retire en partie de la structure par la suite: c'est la couche sacrificielle.
Le choix du matriau pour la couche sacrificielle, associ un produit de gravure slectif est
capital dans l'laboration d'un microsyteme. Deux familles de produits de gravure peuvent tre
dissocies [II.16].
Les gravures isotropiques gravent dans toutes les directions la mme vitesse. Il est noter que
certains matriaux comme le dioxyde de silicium sont plus prcis graver notamment lorsqu' il est
ncessaire de graver horizontalement entre deux couches. En contrlant le temps de gravure
l'acide fluorhydrique, il est possible d'obtenir une prcision suprieure 2 microns sur la distance
grave horizontalement.
Les gravures anisotropiques vont, sur des matriaux cristallins, privilgier certaines directions du
cristal. Ainsi dans le cas du Silicium grav par de l'hydroxyde de potassium (KOH), la gravure sera
forte dans la direction <100> et faible dans la direction <111> avec un ratio de 500 pour la vitesse
de gravure. De plus, cette gravure s'arrte lorsqu'elle rencontre un silicium dop P par du bore.
36
Figure II.7: Modle RLC d'un microcommutateur capacitif parallle
Ligne RF Ligne RF
C
L
R
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Il est ainsi possible de retirer certain endroit le substrat Silicium pour le remplacer par de l'air.
Cette technique permet, par exemple, de crer des guides d'onde CPW trs faibles pertes (Figure
II.8.a) [II.17] ou des antennes intgres sur substrat silicium (Figure II.8.b) [II.18].
(a)
(b)
Figure II.8: (a) ligne CPW micro-usine pour rduire les pertes d'insertion (b) antenne micro-usine
sur substrat air
.1.2.3.2. Contrainte dans les membranes suspendues
Les MEMS sont encore plus sensibles que les circuits intgrs classiques au problme de
contrainte. La contrainte, dnote
a
, est assez simple dfinir dans les cas d'une poutre qu'on
dforme par un tirement comme sur la figure II.9. C'est une quantit sans dimension.
c
a
=
AL
L
0
(II.2)
37
<100>
Plan de masse
Membrane
Ligne de signal
Air
Tranche de Silicium
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Le contrainte est une pression qui se dfinit comme le rapport d'une force et de la surface o
s'applique cette force (II.3). Il s'exprime en gnral en Pascal:
c=
Force
Surface
(II.3)
Selon la convention standard de signe, une contrainte d'tirement sera positive et une contrainte de
compression sera ngative.
Ces deux paramtres sont lis par une constante pour une utilisation lastique des matriaux (aprs
une dformation, le matriau revient l'identique). Cette constante est le module de Young, il
caractrise chaque matriau.
Dans le cas de dpt d'une couche fine sur un substrat, celle-ci va prsenter une contrainte
rsiduelle. L'origine de ce contrainte peut venir de deux causes distinctes classes en deux familles,
les causes intrinsques et les cause extrinsques.
La contrainte intrinsque rsulte en gnral d'un mauvais quilibre du film dpos. Pendant la
dposition, aprs avoir atteint la surface, les atomes peuvent ne pas avoir l'nergie cintique ou le
temps suffisant pour former la structure cristalline dsire. Cette structure atomique non quilibre
est porteuse d'une contrainte interne. Il est possible par la suite de rduire cette contrainte par un
dpt temprature leve pour forcer un rarrangement de la structure.
La deuxime source de contrainte provient de la diffrence de coefficient thermique entre le film
dpos et le substrat. Quand la temprature de dpt est plus haute que la temprature de
fonctionnement du composant, aprs refroidissement, une contrainte rsiduelle est prsente dans la
couche fine.
Si on s'intresse au cas d'une membrane relche, on comprend bien que la contrainte va avoir un
effet important sur la forme de celle-ci. Dans le cas d'une contrainte d'tirement (qui est en gnral
le cas pour nos structures), une membrane de type pont va naturellement se relever en son centre
(Figure II.10). Dans ce cas, la tension d'activation ne sera pas celle qui aurait t calcule pour une
structure plane. Il convient donc de prter une grande attention ce facteur difficilement prvisible.
Les tolrances pour un process sont en gnral de 30 %.
38
Figure II.9: longation d'une structure cause par une force F
Lo
Lo + L
Force F Force F
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a) (b)
Figure II.10: (a) Membrane de type pont, (b) gros plan sur l'ancrage
II.1.2.4. Procds d'activation
.1.2.4.1. lectrostatique
La plupart des microcommutateurs MEMS RF utilisent l'activation lectrostatique. Le principe
d'actionnement suppose qu'en appliquant une diffrence de potentiel entre deux lectrodes
d'activation (membrane et lectrode infrieure), une force lectrostatique d'attraction entre les deux
plaques est cre. Celle-ci va induire un dplacement de l'armature mobile (membrane) entranant
une variation de la capacit. Il reste maintenant savoir quelle est l'expression de cette tension
d'activation permettant la mise l'tat bas du MEMS. La Figure II.11 prsente une vue simplifie
en coupe du mcanisme mis en oeuvre.
39
Figure II.11: Schma simple d'un microcommutateur actionnement lectrostatique
g
0
Membrane mtallique mobile
lectrode d'activation
Couche de dilectrique
k
x
Ressort
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Le microcommutateur fait intervenir deux forces: la force mcanique F
m
due l'abaissement ou
au relvement de la membrane mobile, et la force lectrostatique F
e
cause par le champ
lectrostatique lui-mme qui drive de la tension continue. L'quation (II.4) donne l'expression de
la force lastique et l'quation (II.5), celle de la force lectrostatique [II.19]:
F
m
=kx (II.4)
F
e
=
1
2
V
p
2
dC( x)
dx
=
1
2
V
p
2
c S
(
g
0
x
)
2
(II.5)
o k est la constante de raideur du ressort qui soutient la poutre, x est le dplacement de la
membrane, C(x) la capacit entre l'lectrode et la membrane en fonction de x, la permittivit
dilectrique de la rgion entre la membrane et l'lectrode d'actionnement, g
0
est la hauteur initiale
de la membrane avant polarisation, S reprsente la surface en regard entre la membrane et
l'lectrode et V
p
correspond la tension d'activation. Ce systme est l'quilibre si la somme de ces
deux forces est gale zro (relation II.6).
F
e
+F
m
=0 (II.6)
L'galit ci-dessus amne rsoudre l'quation d'un polynme d'ordre 3 de variable x:
x
3
2 g
0
x
2
+g
0
2
x
V
p
2
c S
2k
=0
(II.7)
Les electrodes mobiles ont une variation linaire sur un tiers de la hauteur, soit g
0
/ 3. Cette
hauteur correspond une tension d'activation V
p
de la forme:
V
p
=
.
8k g
0
3
27c S
(II.8)
De plus, pour que le MEMS soit compltement l'tat bas, on prfre appliquer une tension
lgrement suprieure V
p
, typiquement de l'ordre de 1,2 1,4 fois V
p
[II.5]. Gnralement V
p
est
comprise entre 20 V et 80 V [II.11-II.20]. Comme celles-ci sont assez leves, les concepteurs
essaient de trouver le meilleur compromis entre les diffrents paramtres k, g
0
ou S pour les
diminuer, voire mme proposer de nouvelles solutions [II.7-II.21].
.1.2.4.2. Thermique
Le tableau II.2 expose les caractristiques lastiques et thermiques de diffrents matriaux
couramment utiliss en micro-lectronique.
Le principe de lactionneur thermique repose sur la dilatation des matriaux sous laction dun
chauffement gnr par effet Joule: cest l'effet bilame thermique. Les deux matriaux utiliss
doivent avoir une extension thermique la plus diffrente possible. Ainsi le CEA-LETI a utilis,
dans le cadre des projets MIRA1 et MIRA2, pour actionner ses MEMS thermiques, un bilame
Nitrure de Silicium-Aluminium [II.6].
40
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Proprits Module de Young
(G Pa)
Conductivit
thermique(W/cm C)
Extension thermique
(10-6/C)
SiC 700 3,5 3,3
Si 190 1,6 2,3
Al2O3 530 0,5 5,4
Si3N4 385 0,2 0,8
Or 80 3,2 14,3
Nickel 210 0,9 12,8
Acier 210 1 12
Aluminium 70 2,4 25
Tableau II.2: Caractristiques lastiques et thermiques des diffrents matriaux
.1.2.4.3. Magntostatique
Pour utiliser des forces magntiques, il est ncessaire dintgrer des matriaux et des dispositifs
relativement complexes (bobines MEMS notamment). Cependant, ce type dactionnement induit
des forces plus importantes (comparativement aux forces lectrostatiques) et il en rsulte des
distances d'interaction plus importantes. De plus, les forces magntiques peuvent tre attractives ou
rpulsives.
Par ailleurs, grce aux matriaux magntiques, il est possible de raliser des commutateurs
bistables qui ne consomment de l'nergie que lors de lactionnement, puisque les proprits
magntiques peuvent tre intrinsques. Nanmoins, la phase dactionnement demande beaucoup de
puissance et ce type de composant est plus difficile intgrer.
.1.2.4.4. Piezolectrique
Les actionneurs pizolectriques sont bass sur la facult des matriaux pizolectriques se
dformer mcaniquement sous limpulsion dune excitation lectrique. Lorigine physique de ce
phnomne provient de la cration de diples lectriques dans un matriau dilectrique soumis un
champ lectrique extrieur. Ces diples vont engendrer un moment dipolaire qui est linairement
dpendant du champ lectrique extrieur. Dans les MEMS, ce sont notamment les cristaux de ZnO,
LiTaO
3
, AlN et de PZT qui sont utiliss comme actionneurs.
Le tableau II.3 rsume les avantages et inconvnients de chaque technique d'activation.
Mcanisme Densit
nergtique
(J/cm3)
Pression
(N/cm)
Dplacement
(um)
Consommation Temps de
rponse
(s)
Compatibilit
avec circuits
intgrs
Electrostatique 0,1 100 1 Trs faible 10 haute
Magntostatique 1 100 10 Moyenne 100 moyenne
Thermique 0,1 10^4 1 Importante 100 haute
Piezolectrique 0,1 10^4 1 Trs faible 10 moyenne
Tableau II.3: Comparaison entre les diffrents types d'actuation
41
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
II.1.2.5. Mise en botier
La mise en botier ou packaging est certainement le problme le plus crucial actuellement rencontr
empchant l'essor des MEMS. Si dans les circuits microlectroniques, le packaging est trs bien
matris, il reprsente cependant un cot trs important sur le prix final (30 60%). Dans le cas des
micro-systmes, le botier doit protger la structure mobile des agressions extrieures (moisissure,
eau, poussires...) sans pour autant modifier son fonctionnement. Les botiers de type cramique
sont privilgis pour modifier au minimum les caractristiques lectromagntiques des structures.
Il existe deux familles de boitiers pour les MEMS. Le premier type est dpos suivant le mme
procd que le MEMS lui-mme, donc avec une couche sacrificielle qui doit ensuite tre retire.Le
CEA-LETI a propos une solution assez aboutie [II.22]. Une couche sacrificielle paisse est
dpose sur les micro-systmes puis elle est recouverte de SiO
2
et des trous sont ouverts dans la
membrane d'oxyde (Figure II.12.a-b). La couche sacrificielle est alors retire par gravure sche. Un
nouveau dpt d'oxyde est effectu pour sceller la cavit. Enfin, les plots de contact sont dgags
pour permettre la connection du composant (Figure II.12.c). Une photographie du rsultat final est
prsente sur la Figure II.12.d.
(a)
(b)
(c)
(d)
Figure II.12: (a-c) Diffrentes tapes d'encapsulation au LETI (d) Photographie du package final
La deuxime solution vise reporter un encapsulage extrieur sur la structure MEMS. Le capot est
micro-usin part puis solidaris au substrat par des techniques de collage de substrat semi-
conducteur. La compagnie Radant MEMS a dvelopp cette technique pour ses micro-
commutateurs (Figure II.13) [II.23].
42
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
Figure II.13: (a) Schma et (b) photographie d'encapsulation du MEMS srie de Radant MEMS
II.1.3. tat de l'art des microcommutateurs
II.1.3.1. Les microcommutateurs srie
Des solutions utilisant cette architecture ont t proposes par de nombreuses socits et
universits (Radant MEMS, Teravicta, Omron, Rockwell, CEA-LETI, ST Microelectronics,
Motorola, HRL, Samsung, Berkeley, l'Universit d'Illinois, l'Universit du Michigan, LAAS,
l'Universit de Limoges,) [II.3], [II.9], [II.24]. Deux types de structures sont principalement
utiliss, ceux o la poutre mobile sert de ligne de transmission [II.25] (Figure. II.14) et ceux o la
poutre va simplement permettre le contact entre les deux extrmits d'une ligne de transmission
coupe [II.26]. Pour le premier type de structure, le composant le plus abouti est dvelopp par
Analog Devices/Radant MEMS [II.27]. Il prsente une isolation de 27 dB et des pertes d'insertion
de 0,15 dB 20 GHz. La tension d'actionnement de ce micro-composant varie entre 60 et 80 V et le
temps de commutation de 2 3 s suivant les gomtries considres. Le temps de commutation a
une grande importance, car de nombreuses applications RF ncessitent des temps de commutation
trs faibles. Ce temps dpend fortement de la frquence de rsonance mcanique de la poutre, plus
elle est haute, plus le temps de commutation sera faible. La structure a t fabrique avec une
paisseur dor importante pour rendre la poutre plus rigide ce qui permet dobtenir une frquence
de rsonance mcanique leve variant de 100 300 kHz en fonction de la structure tudie. La
hauteur de la poutre au niveau du contact varie de 0,2 2 m et la rsistance de contact (lorsque le
microcommutateur est actionn) varie de 1 1,5 selon la gomtrie. Cette structure possde le
record du nombre de commutations dpassant le milliard avant cassure.
43
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
En ce qui concerne le deuxime type de structure, le microcommutateur dvelopp par Rockwell
[II.28] prsente de meilleures caractristiques (Figure II.15). Lisolation prsente par ce
composant est de 20 dB jusqu 90 GHz (30 dB 40 GHz), ses pertes d'insertion sont de 0,1 dB
pour des frquences variant de 0,1 50 GHz. Son temps de commutation varie de 8 10 s et sa
tension d'actionnement de 50 60 V suivant la gomtrie considre. La poutre de la structure est
ancre en quatre points grce des ressorts (Figure II.15a) qui permettent de diminuer la tension de
commutation. Les lectrodes dactionnement en or ont une surface de 75 x 75 m
2
pour une
paisseur de 0,25 m. La membrane est en dioxyde de silicium, elle a une paisseur de 2 m. Le
contact mtallique en or a une paisseur variant de 0,5 1 m et une hauteur variant de 2 2,25m.
La rsistance de contact varie galement en fonction de la gomtrie du composant. Lorsque le
contact est actionn, cette rsistance est comprise entre 0,8 et 2 . Les dimensions globales du
composant sont denviron 150 m x 250 m.
Une autre solution base sur une activation thermique a t propose par le CEA-LETI [II.6].
Une telle structure combine avantageusement un dplacement important et une faible tension
dactuation propre lactionnement thermique, avec une faible consommation du maintien
lectrostatique (quasiment nulle). Un courant est inject dans deux rsistances situes de part et
d'autre de la poutre (Figure II.11.a). Par effet Joule, on obtient un chauffement local qui se
44
Figure II.14: Microcommutateur Analog Devices/Radant (structure et photographie)
Poutre en or ou en nickel
Electrode d'actionnement
Ancrage
Figure II.15: Microcommutateur de Rockwell, (a) Structure vue de dessus, (b) photographie
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
transmet par convection aux matriaux environnants. Les plots d'actionnement en aluminium sont
colls la membrane en nitrure de Silicium (Si
3
Ni
4
). Par l'action de deux matriaux qui n'ont pas la
mme constante de dilatation thermique (principe du bilame), on obtient une force mcanique qui
dforme la poutre jusqu' ce que l'lectrode mtallique situe sous la poutre vienne en bute sur la
ligne coplanaire (Figure II.11.b). Les lectrodes de maintien suprieures sont dans la poutre. Elles
sont situes proximit des rsistances de chauffage, en regard avec les plans de masse de la ligne
coplanaire qui jouent le rle d'lectrodes de maintien infrieures (Figure.II.11.c). Une fois la poutre
dforme par effet de contraintes thermolastiques diffrentielles, un potentiel est appliqu aux
lectrodes suprieures. La force lectrostatique ainsi gnre maintient le contact ferm.
(a) (b) (c)
Figure II.16: Schma et principe de fonctionnement du microcommutateur actionnement
lectrothermique et maintien lectrostatique du LETI (a) au repos (b) actionnement thermique et (c)
rtention lctrostatique
Ces microcommutateurs sont contact srie "mtal vers mtal" bas sur le contact mtallique entre
la poutre suprieure et la ligne RF centrale de la ligne coplanaire. La ligne coplanaire est constitue
d'or d'une paisseur de 0,9 m construite sur un substrat silicium haute rsistivit (> 1k.cm) avec
2 m d'paisseur de dioxyde de silicium. Le pont suspendu est une distance de 1 2 m de la
ligne RF de transmission l'tat "OFF". L'lectrode suprieure de contact a une paisseur de 0,5
m (Figure II.17). Les techniques de fabrication de ces microcommutateurs sont celles utilises en
microlectronique standard et ces composants MEMS sont intgrables sur des technologies CMOS.
Enfin, la compagnie Magfusion a commercialis en 2003 une solution base sur l'activation
magntique. C'est un commutateur bistable magntique illustr sur la figure II.18. Son principe de
45
Figure II.17: (a) vue de dessus de la zone de contact, (b) vue de l'ensemble du microcommutateur
CEA-LETI
Masse
Rsistance
Ligne RF in
Ligne RF out
lectrode
suprieure
lectrode de maintien
Conducteurs de masse
de la ligne coplanaire
Rsistance
Plot d'actionnement
lectrode
de maintien
Conducteur central
de la ligne coplanaire
Contact mtallique
Poutre
Plot d'actionnement
(a)
(b)
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
fonctionnement repose sur la mise en mouvement dun balancier en matriau magntique
comportant une de ses extrmits un contact lectrique. Cette poutre va passer dune position
lautre lors du passage dun courant dans une bobine situe sous ce balancier. Aprs commutation,
le systme reste dans sa position grce la rtention magntique. Le temps de commutation est de
50 s. Ce MEMS est propos dans un package de 36 mm et propose des performances trs
correctes. A 3 GHz, les pertes d'insertion sont de 0,2dB et l'isolation atteint les 45 dB. Sa dure de
vie est de 10 millions de commutations.
De nombreux autres microcommutateurs ont t dvelopps. Certains utilisent la mme gomtrie
que ceux que nous venons de dcrire. Dautre utilisent des gomtries plus compliques (ce qui
implique des techniques de fabrication plus complexes). De trs bonnes caractristiques lectriques
et mcaniques ont galement t obtenues [II.29].
II.1.3.2. Les microcommutateurs parallles
La socit Raytheon Systems Company (spin off de Texas Instruments) a dvelopp un
microcommutateur capacitif ayant de bonnes performances (Figure II.19). En effet, les pertes
d'insertion sont de 0,25 dB et il est possible d'obtenir une isolation de 25 dB 40 GHz [II.30-31].
Les tensions d'activation varient entre 10 et 60 V suivant la gomtrie et le temps de commutation
moyen est de 3 s. Ce MEMS est bas sur une membrane mtal deux points d'ancrage, placs sur
les masses de la ligne coplanaire. La poutre mobile est en aluminium, sa longueur est comprise
entre 250 et 350 m et son paisseur est de 0,5 m. Le dilectrique (Si
3
N
4
) a une paisseur de 0,1
m. La capacit prsente par le composant ltat bas (Coff) est comprise entre 1 et 6 pF et le
rapport capacit ltat haut/capacit ltat bas Con/Coff varie de 80 120 en fonction de la
gomtrie de la structure.
L'Universit du Michigan a dvelopp un microcommutateur capacitif parallle alliant galement
d'excellentes performances microondes (30 dB d'isolation 20 GHz) et une tension d'activation de
46
Figure II.19: (a) Photographie du switch de RATHEON SYSTEMS et (b) vue en coupe
Electrode d'actionnement
Ancrage
Dielectrique
Trous dans la membrane
Ligne RF
Figure II.18: MEMS magntique Magfusion
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
l'ordre de 8 15 V [II.32]. L'utilisation d'ancrages serpentins (Figure II.20) a contribu
diminuer la constante de raideur du pont et donc abaisser la tension d'activation.
Nous avons prsent quelques exemples de microcommutateurs ohmiques et capacitifs. Il faut
savoir qu'il existe aussi des configurations capacitives de MEMS srie [II.33] et inversement des
architectures parallles contact ohmique [II.34].
II.2. CAPACITS VARIABLES
II.2.1. Diode varactor
Une diode varicap est constitue d'une simple jonction PN (Figure II.21.a). Si la jonction P
+
N est
polarise en inverse, la zone de charge d'espace cre, possde une largeur d qui peut tre
commande par la tension inverse applique. De cette manire, la diode polarise en inverse
possde un comportement identique un condensateur plaques parallles. La zone libre de charge
ou zone dpeuple synthtise le dilectrique, et les couches de semi-conducteur simulent les deux
plaques du condensateur. La valeur de la capacit est alors donne par la relation (II.9): o est la
permittivit du substrat, S la surface de la jonction en m, d reprsente la largeur de la zone
dpeuple en porteur ou zone de charge d'espace.
C=
e S
d
(II.9)
Si la tension inverse augmente, la largeur de la zone d augmente et la capacit C diminue.
La valeur de la capacit C en fonction de la tension inverse v est donne par l'quation (II.10) o C
0
est la capacit pour une tension nulle, le potentiel de la jonction en volts et un paramtre
caractrisant la jonction.
C(v)=
C
0
(1+v/ 1)
(II.10)
47
Figure II.20: Microcommutateur dvelopp par l'universit du Michigan
Ancrage
Serpentin
d'amortissement
suspendu
lectrode
d'abaissement
Zone
capacitive
Serpentin
de connexion
inductif
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Si la concentration en impurets est constante dans les zones P
+
et N alors le paramtre vaut et
la diode est dite jonction "abrupte". Par contre, si la concentration nest pas linaire, ce paramtre
peut atteindre la valeur 2, et la jonction est alors dite "hyperabrupte".
La figure II.21.b reprsente la courbe de la diode varicap MA46H120 de M/ACom utilise dans nos
ralisations qui est une jonction "hyperabrupte" [II.35].
(a)
(b)
Figure II.21: (a) Vue en coupe de la diode varicap (b) Capacit en fonction de la tension inverse
Le modle quivalent dune diode varicap utilise en hyperfrquences est prsent sur la figure
II.22.
Figure II.22: Modle quivalent de la diode varicap
Les lments constituant ce modle sont la capacit de la jonction C(v), la rsistance srie Rs(v), la
capacit Cp due la surface de la mtallisation par rapport la masse et l'inductance L
s
due aux
plots de connexion.
Il est noter que la rsistance srie Rs varie en fonction de la tension applique aux bornes de la
diode et est typiquement de lordre de 0,5 2,5 . Nous pouvons aussi dfinir le coefficient de
qualit ou de surtension Q la frquence f (II.11).
Q=
1
2n f Rs( v) C(v)
(II.11)
48
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Le facteur de qualit prsent par la varicap que nous avons utilis est de 3000 50 MHz pour une
capacit variant de 0,15 1,1 pF [IV.10]. La frquence de coupure f
c
est dfinie comme celle pour
laquelle Q=1.
II.2.2. Capacit variable MEMS
On distingue deux catgories de capacits varactors ralises partir de structures MEMS de types
micro-poutres: les capacits numriques et les capacits analogiques. Les structures numriques
sont gnralement constitues dun rseau de capacits commutes par des micro-commutateurs
MEMS. La plage de variation de capacit de ce type de dispositif, dpend du nombre de
combinaisons possibles et des valeurs des capacits du rseau. Cependant cette variation se fait
uniquement suivant des valeurs discrtes. La stabilit et la reproductibilit de leur comportement
constituent lun des principaux avantages des varactors numriques. En effet, elles sont beaucoup
moins sensibles aux perturbations extrieures (changements de temprature, acclrations,
vibrations, contraintes internes) que les structures analogiques. Un exemple de structure 5 bits
a t propos par Goldsmith et Al bas sur des MEMS parallles (Figure II.23.a).
La capacit peut varier de 1,5 pF 33 pF avec un pas de 1,5 pF. Les commutateurs MEMS
ncessitent des tensions d'activation 60 V. Le facteur de qualit est de 20 1 GHz [II.36].
(a)
(b)
Figure II.23: (a) Rseau de capacits commutes par MEMS (b) Varactor inter-digit
Les varactors analogiques prsentent une variation de capacit continue. Ces composants sont le
plus souvent raliss partir de deux lectrodes conductrices spares par un gap dair dans lequel
se forme la capacit souhaite. Cette capacit devient variable par dplacement dune lectrode par
rapport lautre. On distingue deux types de capacits analogiques MEMS qui utilisent ce principe.
Les rseaux de peignes inter-digits (Figure II.23.b), dont le mouvement latral permet de faire
varier la surface en regard entre les deux lectrodes de ce composant et par consquent sa capacit.
Ces structures sont gnralement ralises partir des techniques dlectrolyse mtallique paisse,
dans des moules sacrificiels de polymre (procd type LIGA), ou partir de techniques de gravure
anisotropes par exemple sur des substrats SOI (Silicon On Insulator). Ces composants prsentent
gnralement des capacits de fortes valeurs (quelques pico-Farads) avec une plage daccord
continue consquente. Ils sont essentiellement utiliss pour des applications basses frquences
(<1GHz). En 1998, Yao et al ont prsent une structure de ce type [II.37] avec une variation de
49
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
capacit de 200% autour de 3 pF avec une tension variant entre 0 et 14 V. Le facteur de qualit
tait de 34 pour une capacit de 5 pF 500 MHz.
Dautres dispositifs sont forms dune fine membrane mtallique ou dilectrique (lectrode mobile)
se dplaant sur de petites distances (1-3m) au-dessus dune lectrode fixe dispose sur la surface
du substrat (Figure II.24.a). En rduisant ainsi le gap dair entre les deux lectrodes, la capacit
forme va augmenter. De dimensions plus petites que les capacits inter-digites (quelques
centaines de m contre quelques dizaines de mm), les capacits de type micro-poutre ou de type
plaque prsentent gnralement des valeurs plus faibles (centaines de femto-Farads) avec une plage
daccord continue moins leve. Cet accord dpend du type dactionnement utilis. Dans le cas
dune commande lectrostatique, la plage daccord est limite par le phnomne dinstabilit de la
micro-poutre. Une lectrode mobile peut tre dplace de manire continue sur 1/3 de sa hauteur
avant qu'un phnomne de contre-raction positive ne provoque l'croulement de la membrane
mobile (phnomne utilis pour faire commuter les microsystmes).
L'Universit de Columbia a propos la structure dcrite sur la figure II.24.b utilisant une membrane
fixe isole du substrat et une seconde membrane mobile. Cette structure permet d'amliorer le
coefficient de qualit de la capacit, il est de 60 1 GHz. La valeur de la capacit peut tre
dplace de 25 % autour de 2 pF avec une variation de 5 V [II.38].
(a)
(b)
Figure II.24: Varactor MEMS avec membrane mobile: (a) Schema et (b) Photographie
Certaines structures ont t dveloppes pour tendre cette plage de variation au-del de cette
limite d'instabilit de la poutre [II.39-40-41-42].
Zou et al. ont prsent une structure utilisant 3 lectrodes, deux lectrodes d'actuation et la capacit
variable proprement parler. Ces trois lectrodes mobiles sont situes des distances diffrentes de
la partie fixe (Figure II.25), la capacit variable tant la plus proche de la partie fixe.
Ainsi la variation continue des lectrodes sur 1/3 de leur distance permet d'obtenir un dplacement
proportionnellement suprieur de la capacit variable. Dans cette ralisation, une variation de 70 %
est obtenue [II.43].
50
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
Figure II.25: Varactor MEMS avec excursion ameliore: (a) schema et (b) photographie
II.3. CIRCUITS PASSIFS ET ACTIFS
II.3.1. Coupleur hybride
II.3.1.1. Coupleur ligne de transmission quart d'onde
Le coupleur hybride (90, 3 dB) est largement utilis dans les circuits microondes pour jouer le rle
de diviseur de puissance. Les coupleurs hybrides conventionnels consistent en quatre lignes de
transmission quart donde dimpdance caractristique Z
0
et Z
0
/
2
(Figure II.26).
Le coupleur hybride parfait divise en quadrature un signal entrant sur le port 1 entre le port 2 (port
direct) et le port 3 (port coupl). On a donc S
21
= -jS
31
=-3 dB. Le port 4 (port isol) ne reoit aucune
nergie. Le port 1 doit avoir une adaptation parfaite. On a donc en linaire: S
11
=S
41
=0.
II.3.1.2. Coupleur hybride quasi-discret
Le principe de ce coupleur est de relier deux lignes de transmission par deux admittances
identiques Y espaces d'une longueur lectrique de 45 (Figure II.27).
51
Figure II.26: Configuration dun coupleur hybride 3 dB, 90
Port 1
Port 4
Port 2
Port 3
\
0
/ 4
\
0
/ 4
Z
0
/ .2
Z
0
/ .2
Z
0
Z
0 \
0
/ 4
\
0
/ 4
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
C'est en 1968 que Peppiatt, Hall et Mc Daniel prsentent pour la premire fois un coupleur quasi-
discret [II.44]. Ils l'utilisent alors comme un coupleur 10dB. La structure est alors compose de
deux lignes de propagations 50 relies par des capacits.
En 1981, Toyoda s'intresse nouveau ce coupleur, et il remplace les capacits par des diodes
varactors [II.45]. Cependant, il impose une longueur lectrique de 90 entre les varactors, qui n'est
pas la plus favorable cette structure (Figure II.28). Il utilise alors cette structure comme un
coupleur directif dont le couplage est reconfigurable. Il fait varier le couplage entre les ports direct
et coupl de -20 dB -4 dB.
Il faut attendre 1989 pour que Fusco propose une tude thorique du fonctionnement d'une telle
structure [II.46]. Il prouve qu'en choisissant une valeur d'admittance adquate, cette structure se
comporte comme un coupleur hybride parfait. Il prsente aussi la possibilit d'utiliser des selfs la
place des capacits. Les diffrentes quations seront prsentes plus loin dans ce document.
II.3.1.3. Hybride reconfigurable
Des nombreuses solutions ont t abordes depuis les anne 50 pour raliser des coupleurs directifs
reconfigurables. La premire topologie a t prsente en 1963, elle utilisait deux guides d'ondes
couples par des iris avec une languette dilectrique se dplaant dans l'un des guides d'onde
(Figure II.29.a). L'objectif n'est pas de raliser un coupleur hybride mais un coupleur dont le
couplage reconfigurable peut alors tre modifi de -3 dB -12 dB [II.47].
52
Figure II.27: Coupleur hybride quasi-discret
Port 1
Port 4
Port 2
Port 3
l
1
Y
2
Z
1
Z
1
l
1
Y
2
Figure II.28: Coupleur quasi-discret propos par Toyoda
Port 1
Port 4
Port 2
Port 3
\
0
/ 4
C C
Z
1
\
0
/ 4
Z
1
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a) (b)
Figure II.29: (a) Guide d'onde coupl reconfigurable (b) Coupleur quasi-discret reconfigurable en
frquence
La premire ralisation base d'lments actifs est propose en 1981 par Toyoda. Elle a dj t
dcrite prcdemment. D'autres ralisations pour reconfigurer la frquence de fonctionnement ont
aussi t proposes. En 1994, Fusco propose une volution de son coupleur semi-discret en
remplaant les capacits par des varactors manuels (Figure II.29.b). Il montre alors que la frquence
de fonctionnement de son coupleur peut tre dplace entre 0,6 GHz et 1,9 GHz [II.48].
En 2001, un coupleur directionnel 20 dB avec un rsonateur LC a t prsent [II.49] et permet de
reconfigurer le couplage entre 1,3 GHz et 1,9 GHz. Le principal inconvnient de cette solution est
de ne pas dpasser un couplage de 20 dB sur le port isol ce qui limite considrablement ses
applications. Un coupleur reconfigurable base uniquement d'lments discrets est propos en
2006 (Figure II.30.a). Il permet de dplacer la frquence de fonctionnement entre 1,6 GHz et 2
GHz, mais les systmes bass sur cette technologie prsentent des pertes importantes [II.50]. Enfin,
l'Universit de Montreal a propos rcemment une topologie base sur un coupleur ligne de
transmission quart d'onde charge par des varactors (Figure II.30.b). Cette strucutre prsente deux
frquences de fonctionnement 1 GHz et 2 GHz qui sont respectivement rglables de 33 % et 10%
par l'intermdiaire des varactors [II.51].
(a) (b)
Figure II.30: (a) Coupleur discret (b) coupleur hybride charg par des varactors
53
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
II.3.2. Dphaseur
Les dphaseurs sont utiliss pour changer la phase d'un signal transmis (phase de S
21
).
Le dphaseur idal a des pertes d'insertion faibles et une amplitude en transmission stable quelque
soit le dphasage. Les dphaseurs peuvent tre analogiques ou numriques. Les dphaseurs
analogiques ont une variation continue de la phase et permettent donc d'obtenir tous les degrs de
prcision souhaite. Les dphaseurs numriques ne proposent qu'un nombre discret de dphasages
mais ils ont une immunit au bruit suprieure car ils font appel des commutateurs tout ou rien.
Il existe de nombreuses architectures possibles pour la ralisation d'une cellule de dphasage et
nous allons prsenter les principales techniques utilises.
II.3.2.1. Lignes commutes
La solution probablement la plus intuitive pour raliser un dphaseur est de forcer le signal se
propager par des lignes de longueurs diffrentes. Ce type de dphaseurs a recours des
commutateurs de type SPNT (1 entre, N sorties). Pour une cellule de dphasage, deux SPNT
seront ncessaires et il y aura N dphasages possibles. Un SP4T ralis par l'universit du Michigan
est prsent sur la figure II.31.a.
Figure II.31: (a) SP4T et (b) dphaseur lignes commutes de l'Universit du Michigan
Des commutateurs sont placs en srie sur chaque sortie du commutateur. Pour diriger le signal
vers une des sorties, le commutateur correspondant cette sortie sera activ alors que les autres
seront dans le mode OFF. A partir de ce SP4T, l'Universit du Michigan a propos un dphaseur de
grande qualit dans la bande des 8-12 GHz (Figure II.31.b). Cette solution permet donc de
54
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
commuter entre 4 dphasages diffrents: 0, 90, 180 et 270. Les pertes dans le pire des cas
(270) n'excdent pas 1dB et atteignent dans le meilleur des cas 0,3 dB [II.52].
Pour augmenter le nombre de dphasages possibles, la solution est de mettre en cascade plusieurs
cellules de dphasage [II.53].
Enfin, une solution alternative base sur des commutateurs MEMS avec une architecture parallle a
t propose par la socit Raytheon [II.54].
II.3.2.2. Lignes charges
Cette technique de dphasage permet d'obtenir des circuits trs large bande. Cette solution est base
sur des lignes de transmission priodiquement charges par des admittances. En modifiant
dynamiquement la valeur de ces admittances, la longueur lectrique quivalente de la ligne de
transmission varie et donc le dphasage qu'elle induit aussi.
La variation des admittances peut tre binaire ou linaire. Dans le cas binaire, on pourra
typiquement utiliser des MEMS de type capacitif comme cela a t propos par l'Universit de
Santa Barbara en 2000. Plusieurs cellules avec diffrents dphasages sont mises en cascade (180,
90, 45). Les cellules sont des lignes CPW charges de manire priodique par des MEMS
capacitifs (Figure II.32). Entre les cellules, le plan de masse est coup et reli par une capacit de
liaison pour bloquer le courant continu. Ainsi, chaque cellule peut tre commande
indpendamment. Les pertes d'insertion moyennes observes 26 GHz sont de 1,7 dB et
l'adaptation est toujours infrieure -7 dB [II.55]. L'erreur de phase est infrieure 8,5 pour tous
les tats.
(a)
(b)
Figure II.32: Dphaseur ligne charge par des commutateurs MEMS: (a) Photographie et (b)
mesures
La deuxime solution consiste utiliser des admittances variation linaire comme les varactors.
L'universit de Calgary a propos une solution trs performante base sur des varactors MEMS
avec un rapport capacitif de 3,4:1 (Figure II.33). A 40 GHz, la structure permet un dphasage de
170 par dB de perte d'insertion tout en maintenant une adaptation infrieure -10 dB [II.56]. Pour
une variation de la tension entre 0 et 16 V, une variation du dphasage de 260 est obtenue pour
une longueur de ligne de 400 um.
55
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
Figure II.33: Lignes coplanaires charges par des varactors MEMS: (a) Photographie et (b) mesures
II.3.2.3. Matrice de Butler
C'est en 1961 que J. Butler propose une solution originale pour alimenter des rseaux d'antennes
[II.57-58]. La matrice de Butler est aujourd'hui un des rpartiteurs de faisceaux les plus rpandus.
Cest un circuit rciproque passif symtrique N ports dentres et N ports de sorties qui alimente
N lments rayonnants produisant N faisceaux rayonns orthogonaux diffrents. Cest un systme
parallle, qui est compos de jonctions qui connectent les ports d'entre aux ports de sortie par des
lignes de transmission de longueurs gales. Ainsi un signal d'entre est plusieurs reprises divis
presque sans perte jusqu'aux ports de sortie. Le schma dune matrice de Butler est identique au
papillon dune FFT (Fast Fourier Transform) [II.59].
Comme la matrice de Butler standard est limite aux puissances de deux pour le nombre dentre et
de sorties, des terminaisons par des ports factices [II.60] ont t suggres. Par la suite,
lintroduction dhybrides 180 a rduit par deux le nombre utile de dphaseurs. On distinguera
alors deux types de matrices de Butler binaires:
les matrices standard, employant des hybrides 90, dont les faisceaux gnrs sont situs de
part et d'autre de la normale au plan contenant les lments rayonnants (Figure II.34.a)
les matrices non standard, employant des hybrides 180, dont les faisceaux gnrs sont
aussi situs de part et d'autre de la normale au plan contenant les lments rayonnants
(Figure II.34.b), mais possdant un faisceau supplmentaire dans l'axe principal
correspondant la normale au rseau dantennes.
56
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Il convient aussi d'observer qu'une matrice de Butler ne devient un dphaseur actif que lorsqu'on lui
adjoint un SPNT en entre o N sera le nombre de ports d'entre de la matrice. En choisissant de
manire dynamique le port d'entre, il est alors possible de modifier le dphasage entre les
diffrentes sorties.
II.3.2.4. Hybride en mode rflexion
Dans une ligne de transmission termine par une ractance pure, lnergie incidente est rflchie
intgralement avec un changement de phase qui dpend de la valeur de la ractance. Si on lutilise
dans un circuit capable de sparer londe incidente de londe rflchie, la phase de londe de sortie
dpendra de la valeur de la ractance place au bout de la ligne de transmission. Le circuit le plus
simple permettant de sparer une onde rflchie de l'onde incidente est le coupleur hybride 3dB. Il
suffit de charger le port direct et le port coupl par une ractance identique. En envoyant une onde
par le port d'entre, celle-ci sera intgralement transmise au port isol avec un dphasage
correspondant la charge ractive augmente de 90. Le principe de fonctionnement est dcrit sur
la figure II.35.
57
Figure II.34: (a) Matrice de Butler standard (b) Matrice de Butler non standard
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Pour obtenir un changement de phase, il faut utiliser un lment partie imaginaire variable.
La solution la plus simple consiste faire varier la longueur des deux lignes connectes au port
direct et au port coupl de l'hybride.
Le dphasage ajout par la ligne sera gal deux fois sa longueur lectrique puisque le signal la
parcourt deux fois. Dans l'quation (II.12), l est la longueur de la ligne et est le rapport entre la
pulsation de l'onde et sa longueur d'onde dans la ligne de transmission.
A1=2l (II.12)
Une solution base de diodes PIN a t propose en 1979 avec quatre cellules en srie permettant
respectivement un dphasage de 180, 90, 45 et 22,5 [II.61]. Les pertes d'insertion sont de 1,6
dB sur une bande allant de 11,7 12,2 GHz. Le temps de commutation est de 1ns.
L'Universit de Soul a prsent en 2002 un dphaseur 2 bits intgr sur silicium avec des
commutateurs MEMS [II.62]. Des commutateurs sries sont placs en cascade sur des lignes CPW
(Figure II.36). Le circuit prsente des pertes d'insertion moyennes entre 50 et 70 GHz de 4 dB et
une adaptation infrieure -11 dB, le tout sur une surface de 1,5 mm*2,1 mm.
58
Figure II.35: Configuration d'un coupleur hybride en mode rflexion
1
4
2
3
3dB, 90
Coupleur
Port d'entre
a
1
=120 -
a
2
=1/ .( 2)290 -
a
3
=1/ .( 2)2180 -
Port isol
Port direct
Port coupl
-b
2
=I/ .(2)290
-b
3
=I/ .( 2)2180
-b
4
=I/ 2290+I/ 2290
-b
1
=I/ 220+I/ 22180
I=12|2arctan(Y
1
Z
0
)
Y
1
Y
1
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
Figure II.36: Dphaseur de type rflection (a) circuit et (b) commutateur MEMS
La deuxime solution consiste utiliser des capacits variables. On peut par exemple utiliser des
diodes varicap [II.63]. La ligne en srie avec les varactors introduit un effet selfique srie. Pour
obtenir une dynamique de dphasage maximale, la longueur de la ligne sera choisie pour atteindre
la rsonance de ce circuit LC au milieu de la dynamique de variation de la capacit de la diode. La
ractance de la charge passe d'une valeur inductive une valeur capacitive. Cette augmentation de
dynamique de dphasage sera cependant accompagne dune fluctuation de lamplitude du signal
de sortie dphas.
En reprenant le schma quivalent de la diode varactor (Figure II.22), on peut calculer pour
l'impdance quivalente (II.13), la relation (II.14) prsentant la partie imaginaire.
Z
charge
=R
d
+jX (II.13)
X =( oL
1
oC
d
) (II.14)
Puisque l'inductance est introduite par une ligne court-circuite de longueur l et d'impdance
caractristique Z
0
nous pouvons crire (II.15):
oL=Z
0
tan (l ) (II.15)
et pour une excursion AX / 2 autour de X=0, le dphasage s'crit (en ngligeant R
d
) (II.16):
A=2arctan(A X / 2Z
0
) (II.16)
59
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
De nombreuse solutions ont t proposes pour amliorer ce systme, notamment base de charges
de type chelle [II.64] ou de mtamateriaux [II.65]
II.3.2.5. Dphaseur par addition vectorielle
Le principe propos pour obtenir un dphaseur continu consiste effectuer une addition vectorielle
de deux signaux dphass de 90 et d'amplitudes diffrentes [II.66]. La rsultante peut prendre
plusieurs valeurs d'amplitude et sa phase peut donc varier de 0 90 degrs. Pour ce faire, il
convient de diviser un signal incident en deux signaux dphass de 90 degrs l'un par rapport
l'autre, par l'intermdiaire d'un coupleur hybride par exemple.
Ces signaux alimentent ensuite deux amplificateurs identiques dont les sorties sont additionnes,
grce un diviseur de Wilkinson.
En faisant varier les gains des deux amplificateurs indpendamment, on effectue l'addition
souhaite et on obtient alors un signal dont la phase peut tre contrle.
La figure II.37 reprsente le schma de principe de ce type de circuit. Les quations rgissant son
fonctionnement sont donnes par la relation (II.17)
C e
j
=A+jB=Ce
j arctan (
B
A
)
(II.17)
Pour que seule la phase du signal rsultant varie, il faut que l'on ait
.A +B
=constante avec A
et B l'amplitude des signaux en sortie des deux amplificateurs.
60
Figure II.37: Schma de principe du dphaseur 90
Port
d'entre
A
B
1
4
Additionneur
3
A90 -
B180
C0
1
.2
90 -
A
.2
90 -
B
.2
180 -
C0-
1
.2
180 -
3dB, 90
Coupleur
1
4
2
3
10 -
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Une solution avec plusieurs transistors a t propose pour obtenir une dynamique de dphasage
totale de 360 [II.67].
II.4. ANTENNES ACTIVES
II.4.1.1. Antennes reconfigurables en frquence
De nombreuses solutions ont t proposes pour reconfigurer la frquence de fonctionnement d'une
antenne. Nous allons ci-aprs nous intresser aux diffrentes structures d'antennes.
.4.1.1.1. Antennes actives de type microruban
Une solution pour modifier la frquence de rsonance et par consquent, la longueur lectrique de
l'antenne est l'intgration d'un, ou plusieurs condensateurs variables entre l'lment rayonnant et le
plan de masse. La position du composant est un des paramtres qui dtermine la variation de la
frquence de rsonance. En effet, plus celui-ci se rapproche d'un des bords de l'lment rayonnant
et plus la variation en frquence sera importante.
Des prototypes d'antennes patch circulaire alimentation par couplage lectromagntique (Figure
II.38) ont t raliss afin de faire varier la frquence de rsonance, de rduire la taille de l'lment
rayonnant et d'largir la bande passante [II.68]. Une antenne patch peut tre modlise par un
circuit quivalent RLC. Un condensateur variable est plac entre l'lment rayonnant et le plan de
masse, prs de l'un des bords du patch circulaire. Une rsistance est place symtriquement de
l'autre ct. En faisant varier soit la rsistance, soit le condensateur (en gardant la mme taille pour
l'lment rayonnant), la frquence de rsonance de l'antenne diminue fortement et la bande passante
augmente. Le couple rsistance/condensateur intgr permet d'obtenir une diminution de la taille de
l'lment rayonnant de 63% par rapport une structure possdant seulement une rsistance, pour
une bande passante identique. Bien que ce cas soit intressant, la rsistance intgre entrane des
pertes par effet Joule et fait donc chuter le gain de l'antenne par rapport une structure sans
rsistance. Enfin, il faut radapter l'impdance d'entre de la structure en rajustant la taille de la
fente de couplage et la longueur de la ligne microruban.
Une seconde solution permettant de faire varier la frquence de rsonance est d'utiliser des diodes
varicap [II.69]. Sur la figure II.39, l'antenne utilise le mme type d'alimentation par fente vu ci-
dessus. Le rsonateur est de forme rectangulaire et l'on place deux diodes varicaps prs des bords
du patch afin d'obtenir une variation en frquence maximale. Les diodes sont connectes entre le
patch et le plan de masse. L'alimentation des diodes varicaps se fait par une fine ligne microruban
place sur la face arrire du substrat contenant le plan de masse et connecte au centre du patch,
endroit o le champ lectrique HF est nul. En polarisant les diodes entre 0 et 22 V, la frquence de
rsonance de l'antenne varie entre 1,62 et 2,57 GHz pour une bande passante constante de 950
MHz. En conclusion, l'insertion de diodes varicaps permet ici d'obtenir une structure dont la
frquence est commandable sur 83 % et bande passante quasi-constante.
61
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Sur la figure II.40, une application pour la tlphonie mobile, constitue d'un patch carr aliment
par sonde coaxiale et de quatre diodes varicaps connectes entre le plan de masse et l'lment
rayonnant, est prsente. L'alimentation des varicaps varie entre 0 et 3,5V (tension quivalente
celle dlivre par une batterie de portable). La frquence de rsonance du patch est de 1,82 GHz et
peut tre dplace jusqu' 2,25 GHz. Ainsi, une bande de frquence variable de 560 MHz (27 %)
est obtenue si on considre une frquence de rsonance centrale de 2 GHz. La bande passante
-10dB pour chaque valeur de tension de polarisation est de l'ordre de 100 120 MHz.
Le nombre de diodes utilises dtermine la frquence centrale de la bande variable. Les
performances de l'antenne du point de vue du gain (3dBi) et du rayonnement sont typiques pour ce
genre de structure [II.70].
62
Figure II.38: Antenne patch circulaire avec rsistance et capacit intgres
Fente de couplage
'
Ligne microruban
Plan de masse
Condensateur intgr Rsistance intgr
Patch circulaire
Fente de couplage
Figure II.39: Antenne patch alimente par fente avec deux diodes varicaps
Patch carr
ligne microruban
fente de couplage
Plan de masse
r1
r2
Diode Varicap
ligne microruban pour alimentation DC
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
.4.1.1.2. Antennes actives de type fente
Les antennes de type fente possdent les mmes avantages que les antennes de type microruban:
petite taille, faible poids, technique d'insertion de composants simple avec dans la majorit des cas
l'obtention d'une plus grande bande passante. L'excitation de ce type d'antenne se fait par couplage
lectromagntique facilitant l'adaptation de l'antenne puisque celle-ci est gale l'impdance
caractristique de la ligne utilise pour l'alimenter.
Une antenne reconfigurable de type patch, ouverture hexagonale, alimente par couplage
lectromagntique utilisant une diode PIN a t propose [II.71] (figure II.41). La diode PIN sert
d'interrupteur afin de court-circuiter une fente rectangulaire dbouchante place sur un des cots de
l'hexagone. Une capacit place en fin de cette fente permet de bloquer l'alimentation DC et assure
galement une bonne continuit RF. Ici l'insertion de la fente rectangulaire divise le mode
fondamental du patch avec ouverture hexagonale en deux modes rsonnants spars (TM
10
et
TM
01
). Ces deux frquences de rsonance peuvent tre dplaces en changeant la taille effective de
la fente par l'intgration d'une diode PIN en son sein. Lorsque la diode PIN est non alimente
(quivalente un circuit-ouvert l'tat 'OFF'), le courant sur le patch circule le long de la fente et
traverse la capacit ce qui permet d'obtenir une certaine longueur effective de la fente. Cette
configuration va correspondre deux frquences de rsonances basses (1,48 GHz et 1,99 GHz).
Lorsque la diode PIN est alimente (quivalente un court-circuit l'tat 'ON'), cela permet de
dvier le courant et ainsi rduire la taille effective de la fente. Un dplacement des deux frquences
de rsonance, de 110 MHz pour la premire et de 60 MHz pour la deuxime, est ainsi provoqu.
Afin d'alimenter correctement la diode PIN, une autre fente de largeur assez fine taille sur le patch
sert d'isolation DC sans pour autant affecter la circulation des courants sur celui-ci.
Cette antenne permet d'obtenir une rduction de taille respectivement de 61% et 26% pour chacune
des deux frquences de rsonance, compare un patch rectangulaire classique. Cependant, le gain
de la structure active chute de 1,3 dB quand la diode est a l'tat 'OFF' et de 2 dB quand la diode est
l'tat 'ON' par rapport un patch classique .
63
Figure II.40: Antenne patch alimente par sonde coaxiale avec quatre diodes varicaps
Sonde coaxiale
Plan de masse
Diodes Varicaps
Patch rectangulaire
r
L
p
W
p
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
L'avantage des antennes de type fente est leur bande passante plus large, de l'ordre de 5%, soit
deux trois fois plus grande que celle d'une antenne de type microruban.
.4.1.1.3. Antenne PIFA reconfigurable en frquence
Les antennes PIFA ou quart d'onde sont obtenues en plaant un court-circuit plan entre l'lment
imprim demi-onde et le plan de masse, l'endroit o le champ lectrique s'annule pour le mode
fondamental. La bande passante est de l'ordre de 5%.
La figure II.42 montre une antenne PIFA commutable diode PIN. L'lment rayonnant est
fabriqu sur un substrat de type Tflon. L'antenne est constitue d'un plan de masse, d'une diode
PIN place en bout du plateau suprieur et d'un condensateur dispos prs de l'alimentation de
l'antenne. Les composants sont connects entre le plateau suprieur et le plan de masse. La tension
de commutation DC est amene la diode PIN travers la sonde d'alimentation, le condensateur
servant d'isolation DC, permet d'avoir une bonne transmission du signal radiofrquence. Le
fonctionnement de l'antenne est le suivant: lorsque la diode PIN est polarise en direct, elle court-
circuite le plateau suprieur et l'antenne fonctionne en systme boucl (la boucle se faisant entre le
plan de masse, les deux court-circuits et le plateau). Lorsque la diode est polarise en inverse, elle
se comporte comme un circuit-ouvert et l'antenne fonctionne en mode PIFA. Ainsi, il est possible
d'obtenir une commutation entre deux bandes de frquences [II.72].
Les proprits lectriques d'une antenne de portable et plus particulirement la bande passante, sont
fortement dpendantes de la taille du plan de masse sur lequel est place l'antenne. Si le plan de
masse rsonne la mme frquence que l'antenne, le facteur de qualit de l'lment rayonnant va
64
Figure II.41: Antenne patch reconfigurable avec diode PIN
Capacit intgre
Ouverture
hexagonale
Substrat diletrique
r
Ligne microruban
d'alimentation
r
Diode PIN
Fente pour
isolation DC
Plan de masse
Patch carr
Figure II.42: Antenne PIFA commutable avec diode PIN
Plan de masse
Sonde d'alimentation
Condensateur Diode PIN
Patch rectangulaire
Substrat Teflon
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
diminuer entranant une augmentation de la bande passante. Un moyen de faire varier la valeur de
la frquence de rsonance de la structure est de changer la taille du plan de masse. Deux lignes de
transmission de longueurs diffrentes peuvent faire office de stub d'adaptation (Figure. II.43). Elles
sont relies l'antenne via un interrupteur, la commutation de l'antenne l'une des deux lignes
entrane une variation de la frquence de rsonance de la structure. Ce type d'antenne pourrait tre
utilis pour la conception d'un mobile universel capable de fonctionner sur les normes amricaines
et europennes par simple commutation [II.73]. Dans cette exemple, l'antenne PIFA est capable de
commuter sa bande haute entre la norme DCS (1710-1880 MHz) et la norme PCS (1850-1990
MHz), tout en conservant une adaptation suprieure -10 dB.
Le problme majeur des diffrentes structures dcrites prcdemment provient des non-linarits
des composants utiliss (diodes PIN et varactors). Les normes, notamment en tlphonie mobile
sont trs strictes en terme d'isolation de signaux entre les canaux adjacents. Des solutions base
de composants MEMS ont t proposes car leur linarit est largement suprieure.
.4.1.1.4. Antennes avec composants MEMS
Nous avons vu prcdemment que la variation d'une capacit sur le bord d'un patch pouvait
permettre un dplacement de la frquence de rsonance. Ce principe est exploit dans [II.74] avec
l'emploi de commutateurs MEMS. Les MEMS sont utiliss pour crer des capacits sur les bords
du patch (Figure II.44). Lorsque le commutateur est aliment, la lamelle mtallique sabaisse grce
la force lectrostatique et vient se plaquer contre la couche de dilectrique, la capacit augmente
et dcale alors la frquence de fonctionnement de lantenne de 1.6% (de 25 GHz a 24,6 GHz).
Une solution assez originale a t propose par l'Universit d'Ulm, l'ide est de modifier la forme
d'une antenne patch micro-usin sur silicium (Figure II.45.a). Les bords de ce patch sont relchs.
En utilisant une membrane avec une contrainte assez importante, les bords se relvent et modifient
le substrat quivalent de l'antenne (Figure II.45.b). En appliquant une tension entre le substrat et le
patch, on dforme le patch jusqu' ce qu'il soit compltement coll au dilectrique. Ce dplacement
modifie la nature du substrat sous le patch et modifie ainsi la frquence de fonctionnement. On
observe ici une variation continue de la frquence de fonctionnement de 10% autour de 30 GHz
avec une tension variant de 0V 80 V [II.75].
65
Figure II.43: Antenne PIFA avec modification du plan de masse basse de transistor FET
X
Y
Z
Rsonateur Fente
Charge capacitive
Charge capacitive
Court-circuit
Languette de connexion
du circuit actif l'antenne
Languette d'alimentation
Ligne 1
Ligne 2,1
Ligne 2,2
Interrupteur
FET
a)
b)
Substrat Duroid
avec mtallisation
en face arrire
Interrupteur d'inversion
de polarit (DC)
Interrupteur FET
Ligne 2,1
Ligne DC
Bobine d'arret
Batterie
Ligne 2,2
Ligne 1
c)
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
Figure II.45: (a) Antenne patch sur Silicium gomtrie variable (b) Schma de la structure
II.4.1.2. Antennes polarisation commande
Les antennes agiles en polarisation permettent de changer l'tat de leur polarisation
dynamiquement. Celle-ci peut tre linaire (verticale ou horizontale) ou circulaire (gauche ou
droite) en fonction de l'application. La diversit de polarisation gagne en popularit grce au
dveloppement des communicaitons sans-fil. Pour des communications mobiles en zones urbaines,
elle est utilise pour diminuer les attnuations dues aux propagations multi-trajets. La
reconfiguration de polarisation peut aussi tre utilise pour faire de la rutilisation de frquences. Il
est possible avec un transceiver radio d'utiliser deux polarisations orthogonales pour l'mission et la
rception. Ces structures peuvent aussi tre d'une grande utilit pour les systmes MIMO.
La premire antenne patch agile en polarisation a t reporte en 1989 par Schaubert et al [II.76].
La structure est prsente sur la figure II.46 avec l'alimentation RF dans le coin infrieur gauche.
Un patch carr est charg par 4 paires de diode PIN incrustes dans le substrat et connectes la
masse.
66
Figure II.44: Capacit variable MEMS (a) et antenne patch diversit de frquence intgrant des
varicaps MEMS (b)
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Cinq configurations de polarisation diffrentes sont obtenues au final. Quand toutes les diodes PIN
sont l'tat OFF, les deux mode TE 10 et 01 orthogonaux du patch sont excits en phase et
l'antenne rayonne une polarisation linaire diagonale. Si la paire de diodes PIN "Linaire x" est
active alors que toutes les autres diodes sont bloques, la frquence de rsonance du mode orient
suivant l'axe y est dplace vers les hautes frquences sans pour autant affecter la frquence de
rsonance du mode orient en x. L'antenne rayonne alors de manire linaire suivant l'axe x. Pour
rsum, la slection d'un mode unique sur ce patch (dirig selon l'axe x ou y) se fait en dplaant
vers les hautes frquences la frquence de rsonance du mode non dsir. Les diodes PIN sont
places sur le bord du patch car lorsqu'elles court-circuitent le patch, elles dplacent trs largement
la frquence de rsonance du mode concern. Pour obtenir une polarisation circulaire, les deux
modes orthogonaux doivent tre excits avec la mme amplitude et une diffrence de phase de 90.
Cela peut tre obtenu en activant une des paires de diodes places au centre du patch, ce qui va
dplacer modrment la frquence de rsonance du mode correspondant. L'antenne va alors
fonctionner une frquence intermdiaire entre les frquences de rsonance de chaque mode o les
deux modes ont un dphasage de 90. Ces prdictions ont t vrifies de manire exprimentale et
les 5 types de polarisation ont bien t constates. Un premier dsavantage de cette antenne est que
la frquence de rayonnement en polarisation linaire et circulaire n'est pas la mme. Le second
dfaut provient de problmes de fabrication car les diodes doivent tre insres verticalement entre
le patch et le plan de masse.
Une alternative a t prsente en 1994 par Haskins et al [II.77] o les diodes PIN sont remplaces
par des varactors. Deux paires de varactors sont positionnes suivant les deux axes de symtrie du
patch carr (Figure II.47.a). Pour crer le chemin direct vers la masse, les varactors sont encore
directement insrs dans le substrat. Pour permettre de contrler les deux paires de varactors de
manire indpendante, une paire est directement relie la masse alors que la deuxime est relie
la masse par l'intermdiaire d'une capacit de dcouplage directement grave sur le plan de masse
(Figure II.47.b). Quand les deux paires de diodes sont polarises avec la mme tension, le patch
rayonne une polarisation linaire diagonale avec un niveau de polarisation croise suprieure 20
dB. Une polarisation gauche ou droite peut tre obtenue en polarisant une des deux paires entre
67
Figure II.46: Vue de dessus de l' antenne patch avec 5 polarisations diffrentes
antenne
patch carr
a
x
y
Diode PIN
insre dans
le substrat
Linaire y
Linaire y
Linaire x
Linaire x
Circulaire
droite
Circulaire
gauche
Alimentation RF
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
1,5V et 2,5V alors qu'une tension suprieure 25V est applique la deuxime paire. Le rapport
axial de polarisation obtenue est infrieur 1dB sur une bande de 0,6%.
Une autre solution utilisant des transistors bipolaires a t propose [II.78]. Deux transistors en
configuration base commune sont connects sur les bords d'un patch carr par leur metteurs pour
contrler les 2 modes orthogonaux (Figure II.48). Le contrle de phase est ralis en faisant varier
la capacit de jonction metteur-base du transistor par la tension du collecteur. Cette antenne utilise
deux capacits de dcouplage graves sur le plan de masse, ce qui rend possible un contrle
indpendant sur les deux transistors. Cette antenne peut produire une polarisation linaire verticale
ou horizontale avec une polarisation croise dans l'axe infrieure -12 dB. Avec des tensions
adquates, elle peut gnrer une polarisation circulaire gauche ou droite avec un rapport axial
infrieur 2 dB dans l'axe.
Des solutions ont aussi t tudies pour commuter le rayonnement d'une antenne entre une
polarisation circulaire gauche et droite. Laheurte et al [II.79] proposent d'alimenter un patch carr
par deux fentes orthogonales graves dans le plan de masse. Les lignes d'alimentation sont situes
sur un deuxime substrat de l'autre cot du plan de masse. Deux paires de diodes PIN sont insres
dans les fentes 3mm de l'intersection (Figure II.49). En commutant une paire de diodes alors que
la deuxime paire est dans le mode OFF, un sens de polarisation circulaire, gauche ou droite, est
gnr. L'antenne a t ralise 5GHz et une bande passante de 4 % est obtenue pour les deux
sens de polarisation.
68
(a) (b)
Figure II.47: (a) Vue de dessus de l'antenne agile en polarisation avec diode varactor et (b) vue de
cot du placement des diodes varactors
Antenne
patch carr
x
y
Connexion directe
au plan de masse
Alimentation
RF
Alimentation
RF
Substrat
Diode
varactor
Isolant
Capacit de
dcouplage
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Deux ans plus tard, Rahmatt-Samii et al ont propos une nouvelle architecture pour commuter entre
une polarisation circulaire gauche et droite [II.80]. Deux fentes orthogonales sont graves dans un
patch carr et une diode PIN est insre au centre de chaque fente (Figure II.50). En commutant une
des deux diodes, on peut rayonner une polarisation circulaire soit gauche, soit droite. Pour une
antenne conue 4,64 GHz, un rapport axial infrieur 3 dB est obtenu sur une large ouverture
angulaire de -70 +70 par rapport l'azimut. La bande passante avec un rapport axial infrieur
3 dB est de 3%. Cette antenne a pour avantage d'tre compacte et assez simple polariser.
69
Figure II.48: Antenne charge par des transistors bipolaires
Antenne
patch carr
Alimentation
RF
Vb1
Vb2
Figure II.49: Antenne commutable entre polarisation circulaire gauche et droite
Antenne
patch carr
Alimentation
RF
Fentes dans le
plan de masse
Plan de masse
Ligne d'alimentation
Diode PIN
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Une solution base sur une antenne boucle est propose par V. Fusco pour commuter entre une
polarisation circulaire et linaire [II.81]. Elle a une circonfrence de 1,13
0
1 GHz et elle est
positionne 0,3
0
au dessus d'un plan de masse de 33*33 cm. Une diode PIN est insre dans un
gap de 2,7 mm situ 139 par rapport la position de l'alimentation (Figure II.51). Pour obtenir
une polarisation circulaire, les courants surfaciques doivent tre d'amplitudes gales sur chaque
partie de l'anneau avec un dphasage de 90. Quand la diode PIN est commute en position ON,
elle prsente un court-circuit avec une petite rsistance srie (3,6 ), amenant une onde stationnaire
sur la boucle. Une polarisation linaire est gnre avec un niveau de polarisation croise infrieur
18dB. Quand la diode PIN est OFF, elle se comporte comme un circuit ouvert avec une capacit
quivalente de 0,8 pF. Dans ce cas, le courant est distribu sur toute la boucle et une polarisation
circulaire droite est gnre avec un rapport axial infrieur 2,5 dB. Ce systme est extrmement
dlicat raliser et reste trs fragile pour une utilisation industrielle.
(a)
(b)
Figure II.51: (a) Antenne spire commutable (b) Vue du contact d'alimentation
Un systme bas sur les modes dgnrs d'un patch a rcemment t propos [II.82]. Un patch
carr avec ses 4 coins coups est aliment par une ligne microruban. Le fait de tronquer les deux
coins opposs d'un patch va faire dgnrer les deux modes orthogonaux de l'antenne et ainsi crer
une polarisation circulaire. Deux paires de diodes sont connectes dans les quatre coins du patch au
niveau des gaps de 1,4 mm (Figure II.52) pour modifier de manire dynamique la gomtrie du
patch. Quand toutes les diodes sont en mode OFF ou ON simultanment, l'antenne gnre une
polarisation linaire 1,58 GHz et 1,609 GHz respectivement avec un niveau de polarisation
croise suprieure 15 dB. Quand la paire de diodes 1 & 3 est ON alors que les diodes 2 & 4 sont
OFF, une polarisation circulaire gauche 1,6 GHz est produite. Si maintenant les diodes 1 & 3 sont
OFF alors que les diodes 2 & 4 sont ON, une polarisation circulaire droite est gnre une
frquence de 1,604 GHz.
70
Figure II.50: Antenne patch avec fentes commutable pour polarisation circulaire gauche
ou droite
Antenne
patch carr
Plan de masse
Alimentation RF
Diode PIN
Capacit de
dcouplage
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Enfin une solution base sur un anneau circulaire est prsente par Fries et al en 2003 (Figure
II.53.a) [II.83]. Cette solution consiste rajouter l'aide de diodes PIN des perturbations sur
l'anneau pour modifier sa polarisation. Par nature, un tel anneau circulaire prsente une polarisation
linaire. Si deux rectangles parasites creuss dans le plan de masse sont relis par une fine fente
l'anneau (Figure II.53.b), une polarisation circulaire est alors rayonne. Des diodes PIN sont alors
insres dans les fentes. Si elle sont actives, elles court-circuitent les fentes et les rectangles
parasites n'affectent pas le mode de rayonnement de l'anneau. Une polarisation linaire est alors
produite. Si les diodes sont en mode OFF, l'anneau est perturb par les rectangles et l'antenne
rayonne une polarisation circulaire gauche. Pour grer la polarisation des diodes, le plan de masse
est divis en quatre parties relies par des capacits de grande valeur. A 2,4 GHz, l'antenne dans le
mode linaire a un niveau de polarisation croise suprieure 17 dB, et un rapport axial de 3dB est
respect sur une bande de 4,2%. Le mme concept a t tendu une antenne capable de commuter
entre de la polarisation circulaire gauche et droite. L'antenne est alors parasite par quatre
rectangles commuts par quatre diodes PIN (Figure II.53.c). A 2,4 GHz, l'antenne a un rapport axial
infrieur 3 dB sur une bande de 4,3% et 3,4% pour respectivement une polarisation gauche et
droite. Cette antenne a pour particularit comparativement toutes les autres de rayonner dans tout
l'espace alors que les autres antennes ne rayonnent que dans le demi-espace oppos au plan de
masse.
(a)
(b)
(c)
Figure II.53: (a)Vue 3D de l'antenne (b) antenne linaire/ circulaire gauche (c) antenne circulaire
gauche/droite
Une antenne utilisant des commutateurs MEMS a galement t conue lIETR [II.84]. Cette
antenne dveloppe un concept qui lui permet de commuter dune polarisation circulaire une
polarisation linaire. Lantenne de base est constitue d'un patch coins tronqus, donc polarise
71
Figure II.52: Antenne patch avec coins tronqus pour commutation entre polarisation linaire et
circulaire
Antenne
patch carr
Alimentation RF
Diode PIN
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
circulairement (Figure II.54.a). La solution consiste combler les troncatures avec des lments
mtalliques mis en mouvement par des actionneurs MEMS. Lactionneur doit donc produire un
mouvement de translation horizontale. La technologie employe est celle du S.D.A. (Scratch Drive
Actuator) donc le principe est dcrit sur la figure II.54.b. Suivant la position des lments, la
polarisation peut-tre circulaire ou linaire.
(a)
(b)
Figure II.54: (a) Reconfiguration de polarisation par actionneur MEMS (b) Principe du S.D.A.
L'actionneur mcanique est prsent sur la figure II.55. En simulation, cette antenne a un rapport de
polarisation croise suprieure 13 dB et une rapport axial pour la polarisation circulaire infrieur
2 dB sur 5 % de bande 47 GHz.
(a)
(b)
Figure II.55: (a) Principe du micro-actionneur MEMS (b) Photographie du micro-actionneur
Enfin, grce la monte en frquence, il devient possible au sein d'une mme ralisation MMIC
d'associer l'antenne et son lectronique de commande. Ainsi, les travaux de la socit ST
Microelectronics [II.85] ont montr qu'il tait possible sur un substrat haute rsistivit SOI
72
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(Silicium on Insulator) d'associer l'antenne, un filtre et un LNA (Low Noise Amplifier) sur un
mme substrat 40 GHz. La ralisation finale est prsente sur la figure II.56.a. Les mesures du
LNA donnent un gain de 14 dB et un niveau de bruit de 4 dB 40 GHz (Figure II.56.b).
Figure II.56: (a) Tte de rception intgre 40 GHz (b) Gain et niveau de bruit du LNA
II.4.2. Antennes reconfigurables en directivit
II.4.2.1. Rseaux d'antennes avec dphaseurs
Nous avons dj expliqu le principe des rseaux d'antennes balayage lectronique. Ces rseaux
d'lments rayonnants sont aliments par des dphaseurs comme dcrit prcdemment.
De Flaviis et al. ont propos un rseau de 4 antennes alimentes par une matrice de Butler (Figure
II.57.a) pour des applications de type WLAN 5,2 GHz. La matrice de Butler est ralise partir
d'hybrides de type quart d'onde. Pour raliser les croisements sur le substrat, deux hybrides
cascads sont utiliss. L'isolation est suprieure 20 dB sur une bande de 15 % (Figure II.57.a)
[II.86].
(a)
(b)
Figure II.57: (a) Photographie du rseau d'antenne (b) Diagramme de rayonnement pour les 4
modes
73
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
L'Universt d'Uppsala a prsent en 2006 un rseau de 5 antennes patchs 5,8 GHz [II.87]. Les
antennes sont alimentes par une onde progressive qui se propage travers les diffrents patchs.
L'alimentation peut se faire par la gauche ou par la droite (Figure II.58.a). Des dphaseurs de type
hybride en mode rflexion sont insrs entre les diffrents patchs et permettent donc de changer la
loi d'alimentation du rseau. La taille des coupleurs hybrides a t rduite pour pouvoir tre insre
entre les lments rayonnants (Figure II.58.b). Des diodes PIN sont utilises pour ajouter un stub en
circuit ouvert. Les mesures montrent que le rseau peut dpointer son faisceau sur une plage
angulaire de +/- 32 avec un gain suprieur 11 dBi (Figure II.58.c).
(a)
(b)
(c)
Figure II.58: (a) Photographie du rseau (b) Principe de la cellule de dphasage (c) Diagramme de
rayonnement pour les diffrentes configurations
II.4.2.2. Rseaux avec lments parasites
.4.2.2.1. Dfinition
Les rseaux lments parasites sont des antennes exploitant le couplage en champ proche entre
plusieurs lments rayonnants afin de former un diagramme de rayonnement souhait. L'application
la plus connue pour les antennes parasites est l'antenne Yagi-Uda qui est largement employe
depuis les annes 20 pour des applications aux frquences HF UHF. Une telle antenne est
constitue de diples relis entre eux par une barre isolante (Figure II.59).
Un seul lment est aliment mais tous les lments participent au rayonnement par couplage. Les
lments parasites sont par dfinition des antennes secondaires non excites. Elles sont le sige
d'un courant induit d au couplage avec l'lment aliment.
Ces lments parasites permettent de diriger le rayonnement dans une direction voulue. Ils jouent
alors le rle de rflecteur ou de directeurs s'ils sont respectivement plus ou moins longs que le
diple rsonnant aliment.
74
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a)
(b)
(c)
Figure II.59: (a) Dr Yagi et son invention (b) Schma d'une antenne Yagi (c) Diagramme de
rayonnement d'une antenne type Yagi.
.4.2.2.2. Antenne lments parasites commandables
Le systme prsent dans [II.88] est un rseau circulaire base de monoples, avec un seul port
dalimentation RF, les monoples parasites tant chargs par des impdances fixes base de
capacits CMS (Figure II.60.a). Cette antenne met en oeuvre une topologie 6 monopoles
priphriques et 1 monopole central, permettant dobtenir le diagramme de rayonnement simul
prsent sur la figure II.60.b sur plan de masse infini. Les monoples sont aliments par un plan
dalimentation et les antennes sont charges de manire former le diagramme dsir.
Une approche suivant la mme philosophie a t propose par le laboratoire du CEA-LETI [II.89].
Une fente est parasite par deux fentes parallles et charge par un stub donc la longueur est
commandable par l'intermdiaire d'un MEMS. Une photographie du prototype est prsente sur la
figure II.61.a. Les diagrammes de rayonnement avec un MEMS l'tat ON et le deuxime l'tat
OFF et l'inverse sont prsents sur les figures II.61.b et II.61.c respectivement.
75
Figure II.60: (a) Antenne lments parasites commands et (b) son diagramme 3D de rayonnement
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
(a) (b) (c)
Figure II.61: (a) Photographie du prototype et diagramme de rayonnement mesur (plein) et simul
(pointill) des MEMS(b) ON-OFF et (c) OFF-ON
II.5. CONCLUSION
Dans ce chapitre, nous nous sommes efforcs de prsenter un tat de l'art le plus complet possible
sur les antennes reconfigurables. Nous nous sommes intresss dans un premier temps aux
diffrents composants RF qui peuvent tre intgrs au sein des antennes. Ces lments peuvent soit
proposer une commutation binaire entre deux tats diffrents, soit permettre une variation continue.
Nous avons vu par la suite, comment nous pouvions utiliser ces diffrents composants pour raliser
des antennes reconfigurables. Nous avons enfin prsent les diffrentes architectures possibles
d'antennes reconfigurables en frquence, en polarisation et en directivit. Avant de concevoir et
d'tudier de nouvelles topologies d'antennes reconfigurables, nous proposons dans le chapitre
suivant une tude sur les MEMS RF, dispositifs trs performants pour ce type d'applications.
76
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
Rfrences Chapitre II
[II.1] De Los Santos H., "RF MEMS Circuit Design for Wireless Communications", Artech house, Boston,
2002.
[II.2] Itoh T.,Haddad G., Harvey J., "RF Technologies for Low Power Wireless Communications", John
Wiley & sons, New York, 2001.
[II.3] Katehi L.P.B., Harvey J.F., Brown E.R., "MEMS and Si micromachined circuits for high frequency
applications ", IEEE Transactions on Microwave Theory and Techniques, Vol. 50, No. 3, pp. 858, March
2002.
[II.4] Petersen K.E., "Micromechanical membrane switches on silicon", IBM Jour. Res. Develop. , Vol. 23,
No.4, pp. 376 385, July 1979.
[II.5] Rebeiz G.M, Muldavin J.B.,"RF MEMS switches and switch circuits", IEEE Microwave Magazine, pp.
59 - 71, December 2001.
[II.6] Saias D., Robert P., Boret S., Billard C., Bouche G., Belot D., Ancey P., "An above IC MEMS RF
switch", Solid-State Circuits, IEEE Journal of, Vol. 38, Iss. 12, pp. 2318- 2324, Dec. 2003.
[II.7] Billard C., Charvet P.L., Fort C., "RF MEMS thermally actuated switch for communication systems"
European Workshop on Integrated Radio Communication Systems", IEEE AP-S and MTT-S French, Angers,
May2002.
[II.8] Pothier A., Blondy P., Verdeyme S., Champeaux C., Catherinot A.,"Performances et fiabilit de micro
commutateurs MEMS contact ohmique pour des applications RF", 13
mes
Journes Nationales Microondes,
Lille, May 2003.
[II.9] Rebeiz G.M., "RF MEMS Theory, Design and Technology", Wiley, 2003.
[II.10] Richards R.J., De Los Santos H.J., "MEMS for RF/Wireless Applications: The Next Wave",
Microwave Journal, March 2001
[II.11] Mihailovitch R.E., Kim M., Hacker J.B., Sovero E.A., Studer J., Higgins J.A., Denatale J.F., "MEMS
relay for reconfigurable RF circuits", IEEE Microwave and Wireless Components Letters, Vol. 11, N
o
2, pp.
53 55, May 2001.
[II.12] Bozler C., Drangmeister R., Duffy S., Gouker M., Knecht J., Kushner L., Parr R., Rabe S., Travis L.,
"MEMS microswitch arrays for reconfigurable distributed microwave components", IEEE Int. Microwave
Symp. Dig., Boston, pp. 153 156, September 2000.
[II.13] Muldavin J.B., Rebeiz G.M.,"All-metal high-isolation series and series/shunt MEMS switches", IEEE
Microwave and Wireless Components Letters, Vol. 11, N
o
9, pp. 373 375, February 2001.
[II.14] Shen S.C., Feng M., "Low actuation voltage RF MEMS switches with signal frequencies from 0.25
GHz to 40 GHz", IEEE International Electronics Devices Meeting, pp. 689-692, December 1999.
[II.15] Muldavin J.B., Rebeiz G.M,"High Isolation CPW MEMS Shunt Switches", IEEE Transaction on
Microwave Theory and Techniques, pp. 59 - 71, December 2001.
[II.16] Campbell S.A., "The Science and Engineering of Microelectronic Fabrication", Oxford University
press, New-York, 2001.
[II.17] Ojefors E., Grenier K., Mazenq L., Bouchriha F., Rydberg A., Plana R., "Micromachined inverted F
antenna for integration on low resistivity silicon substrates", IEEE Microwave and Wireless Components
Letters, Vol. 15, Iss. 10, pp 627 629, October 2005.
[II.18] Weller T.M., Katehi L.P.B., Rebeiz G.M., "High performance microshield line components", IEEE
Transactions on Microwave Theory and Techniques, Vol. 43, Iss. 3, pp. 534 - 543March 1995.
[II.19] Senturia S.D., "Microsystem design", Kluwer Academic Publishers, pp. 196-198, 2001.
[II.20]Mercier D., Berland E., Pothier A., BlondyP, Cros D., Verdeyme S., "Mthode de modlisation pour
les micro-commutateurs MEMS", 13
mes
Journes Nationales Microondes, Lille, Mai 2003.
[II.21] Peroulis D., Pacheco S.P., Sarabandi K., Katehi L.P.B., "Electromechanical considerations in
developping low-voltage RF MEMS switches", IEEE Trans. on Microwave Theory and Techniques, Vol. 51,
N
o
1, pp. 259 270, June 2003.
[II.22] Gillot C., Pornin J.L., Arnaud A., Lagoutte E., Sillon N., Souriau, J.C., "Wafer level thin film
encapsulation for MEMS", Electronic Packaging Technology Conference, Proceedings of 7th, Vol. 1, pp 243-
247, 7-9 December 2005.
[II.23] Lin et. al., Microelectromechanical Filters for Signal Processing IEEE/ASME J. of
Microelectromechanical Systems, Vol. 7, pp.286-294, 1998
77
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
[II.24] Zavracky P.M., Mc Gruer N.E., Morrison R.H., Potter D., "Microswitches and microrelays with a view
toward microwave applications", John Wiley & Sons, International Journal of RF and Microwave Computer-
Aided Engineering, pp.338-347, August 1999.
[II.25] Pacheco S.P., Peroulis D., Katehi L.P.B., "MEMS Single-Pole Double Throw (SPDT) X and K-Band
Switching Circuits", IEEE MTT-S, Phoenix, AZ, USA, May 2001.
[II.26] Muldavin J.B.,RebeizG.M., "All metal high isolation series and series/shunt MEMS switches", IEEE
Microwave and Wireless Component Letters, Vol.11, N9, September 2001.
[II.27] Majumder S., Lampen J., Morrison R., Maciel J. "MEMS switches", Instrumentation & Measurement
Magazine, IEEE Vol, 6, Iss. 1, pp. 12-15, March 2003.
[II.28] Hoivik N., Michalicek M.A., Lee Y.C., Gupta K.C., Bright V.M., "Digitally controllable variable high-
Q MEMS capacitor for RFapplications", Microwave Symposium Digest, 2001 IEEE MTT-S International,
Vol. 3, pp 2115-2118, November 2001.
[II.29] M1C06-CDK2 datasheet, Magfusion Inc., Chandler, AZ, www.magfusion.com.
[II.30] Goldsmith C., Molczewski A., Yao Z.J., Chen S., Ehmke J., Hinzel D.H., "RF MEMS variable
capacitor for tunable filters", John Wiley & Sons, International Journal of RF and Microwave Computer-
Aided Engineering, pp.362-374, October 1999.
[II.31] Goldsmith C., "RF MEMS circuit, recent developments, packaging and reliability", IEEE MTT-S
Workshop, Phoenix, AZ, USA, May 2001.
[II.32] Pacheco S., Nguyen C.T ,and KATEHI L.P.B, "Micromechanical electrostatic K-band switches", IEEE
MTT-S INT. Microwave Symp. Dig., Baltimore, pp. 1569-1572, May 1998.
[II.33] Duffy S., BozlerC, Rabe S., KnechtJ, Travis L., Wyatt P., Keast C., Gouker M., "MEMS
microswitches for reconfigurable microwave circuitry ", IEEE Microwave and Wireless Comp. Lett., Vol.11,
Iss. 3, pp. 106-108, September 2001.
[II.34] Tan G.L. and Reibez G.M., "DC-26 GHz MEMS series-shunt absorptive", IEEE INT. Microwave
Symp. Dig., Phoenix, pp. 325-328, May 2001.
[II.35] MA46H120, M/A-com company, US, http://www.macom.com/
[II.36] Goldsmith C.L., Malczewski A., Yao Z.J., Chen S., Ehmke J., and Hinzel D.H.,"RF MEMS Variable
Capacitors for Tunable Filters", Int. Journal of RF and Microwave, Computer-Aided Engineering, pp. 362
374, June 1999.
[II.37] Yao J.J., Park S., and DeNatale J.,"High tuning-ratioMEMS-based tunable capacitors for RF
communications applications", Tech. Digest, Solid State Sensor and Actuator Workshop, pp. 124127,
September 1998.
[II.38] Young D.J., Boser B.E., Malba V., and Bernhardt A.F., "A Micromachined RF Low Phase Noise
Voltage-Controlled Oscillator For Wireless Communications", International Journal of RF and Microwave
Computer-Aided Engineering, pp. 285300, May 2001.
[II.39] Borwick R., Stupar P., Denatale J., Anderson R., Tsai C., Garret K., "A high Q, large tuning range
tunable capacitor for RF applications", IEEE MEMS Conference, pp. 669672, August 2002.
[II.40] Dec A., Suyama K., "Micromachined electro-mechanically tunable capacitors and their applications to
RF ICs", IEEE transactions on microwave theory and techniques, Vol. 46, Num. 12, pp.2587- 2596,
December 1998.
[II.41] Dussopt L., Rebeiz G.M., "High-Q millimeter-wave MEMS varactors: extended tuning range and
discrete-position designs", IEEE International Microwave Symposium , Vol. 2, pp. 1205 -1208, June 2002.
[II.42] Peroulis D., Katehi L.P.B., "Electrostatically-tunable analog RF MEMS varactors with measured
capacitance range of 300%", IEEE International Microwave Symposium Digest, pp. 1205 1208., June 2003.
[II.43] Zou J., Liu C., Schutt-Aine J., Chen J., and Kang S.M. "Development of a Wide Tuning Range MEMS
Tunable Capacitor for Wireless Communication Systems", IEDM, pp 403406, June 2000.
[II.44] Peppiatt H.J., Hall J.A., McDaniel A.V., "A Low-Noise Class-C Oscillator Using a Directional
Coupler", IEEE Trans. on Microwave Theory and Techniques, Vol. 16, Iss. 9, Sept. 1968.
[II.45] Toyoda S., "Variable Coupling Directional Couplers Using Varactor Diodes", Microwave Symposium
Digest, MTT-S International,Vol. 82, Iss. 1, pp. 419 421, Jun 1982.
[II.46] OCaireallain S.B.D. and Fusco V.F., Quasi-Lumped Element Quadrature Coupler Design,,
Microwave Opt. Technol. Lett., Vol. 2, pp. 216-218, June 1989.
[II.47] Brodwin M.E., Ramaswamy V., "Continuously Variable Directional Couplers in Rectangular
Waveguide", IEEE Microwave Theory and Techniques, Vol. 11, Iss. 2, pp. 137 142, March 1963.
[II.48] Fusco V.F., Tunable Quasi-Lumped Element Quadrature Hybrid,, Electronic Letters., Vol. 27, pp.
2246-2248, November 1991.
78
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
[II.49] Kim C.S., Park J.S., Ahn D. and Lim J.B. Variable directional coupler with LC resonator,
Electronics letters, Vol. 36, No. 18, pp. 1557-1559, August 2000
[II.50] Fardin E.A, Holland A.S. and Ghorbani K., Electronically tunable lumped element 90 hybrid
coupler, Electronics letters, Vol. 42, No. 6, pp. 353-355, March 2006.
[II.51] Djoumessie. E., Marsan E., Caloz C., Chaker and M. Wu, K. Varactor-tuned dual-band quadrature
hybrid coupler,IEEE Microwave and Wireless Comp. Letters, Vol. 16, No. 11, pp. 603-605, Nov. 2006.
[II.52] Tan G.L., Mikailovitch R.E., Hacker J.B., Denatale J.F., Rebeiz G.M.,"Low loss 2 and 4 bit TTD
MEMS phase shifters based on SP4T switches", IEEE Transactions on Microwave Theory and Techniques,
Vol.51, N1, January 2003.
[II.53] Hacker J.B., Mihailovich E., Kim M., Denatale J.F., "A Ka-band 3 bit RF MEMS true time delay
network", IEEE Transactions on Microwave Theory and Techniques, Vol.51, N1, January 2003.
[II.54] Pillans B., Eshelman S., Malczewski A., Ehmke J., Goldsmith C., Ka-band RF MEMS phase
shifters, IEEE Microwave and Guided Wave Letters, Vol. 9, Iss. 12, pp. 520 522, December 1999.
[II.55] Hayden J.S., Malczewski A., Kleber J., Goldsmith C.L., Rebeiz G.M., "2 and 4 bit DC-18 GHz
microstrip MEMS distributed phase shifters", IEEE MTT-S, Phoenix, AZ, USA, May 2001
[II.56] McFeetors G., Okoniewski M., "Distributed MEMS analog phase shifter with enhanced tuning", IEEE
Microwave and Wireless Components Letters, Vol. 16, Iss. 1, pp. 34-36, January 2006.
[II.57] Butler J., Lowe R., "Beam-Forming Matrix Simplifies Design of Electrically Scanned Antennas,"
Electronic Design, April 1961.
[II.58] Shelton J.P. and Howe R., "Multiple beams for linear arrays," IRE Trans. on Ant. Prop., pp. 154-161,
March 1961.
[II.59] Shelton J.P., "Fast Fourier Transforms and Butler Matrices," Proc. of the IEEE, pp. 350, March 1968.
[II.60] Muenzer J.P., "Properties of linear phased arrays using Butler matrices," Standard Elektrik Lorenz,
Stuttgart, NTZ 1972, Heft 9, pp. 419-422, March 1976.
[II.61] Glance B.A, "Fast Low-Loss Microstrip p-i-n Phase Shifter", IEEE Trans. on Microwave Theory and
Techniques, Vol. 27, Iss. 1, pp. 14-16, January 1979.
[II.62] Park J.Y. , Kim H.T., Choi W., Kwon Y., Kim Y.K., "V-band rflection-type phase shifters using
micromachined CPW coupler and RF switches", Journal of Microelectromechanical Systems, Vol. 11, N. 6,
December 2002.
[II.63] Gardner A.L., Hawke R.S., "High speed microwave phase shifters using varactor diodes", the Review
of Scientific Intruments, Vol. 37, N. 1, January 1966.
[II.64] Sun K-O., Kim H-J., Yen C-C, Weide D., A scalable reflection type phase shifter with large phase
variation, IEEE Microwave and Wireless Components Letters, Vol. 15, Iss. 10, pp. 647 648, October 2005.
[II.65] Han S.M., Kim C.-S., Ahn D., Itoh T., Phase shifter with high phase shifts using defected ground
structures, Electronics Letters, Vol. 41, Iss. 4, pp. 196 197, February 2005.
[II.66] Kumar M., Menna R.J., Huang H-C., Broad-Band Active Phase Shifter Using Dual-Gate MESFET ",
IEEE Trans. on Microwave Theory and Techniques, Vol. 29, Iss. 10, pp. 1098 1102, October 1981.
[II.67] Kim S.J., Myung N.H., A new active phase shifter using a vector sum method", IEEE Microwave and
Guided Wave Letters, Vol. 10, Iss. 6, pp. 233-235, June 2000.
[II.68] Lu J-H , Tang C-H ,WongK-L, "Slot-coupled compact broadband circular microstrip antenna with
chip-resistor and chip-capacitor loading", Microwave and optical technology letters. Vol. 18, No. 5,
August1998.
[II.69] Le Ray G., Himdi M., Daniel J.P., "Frequency agile slot-fed patch antenna", Electronic Letters., Vol.
32, No. 1, pp 2 - 3, January 1996.
[II.70] Portelli A., Muscat A., Muscat J., "Tunable patch antennas for integration in a mobile phone:
simulation and measurement", JINA, Intern. symp. of Nice on antennas, Vol. 1, pp 243 24, May 2002.
[II.71] Shynu S.V. , Gijo A., Anansan C.K., Mohonan P., Vasudevan K., "A reconfigurable dual-frequency
slot-loaded microstrip antenna controlled by PIN diodes", Microwave and Optical Technology Letters, Vol.
44, No. 4, Febrary 2005.
[II.72] Chen Q , Kurahashi M , Sawaya K., "Dual-mode Patch antenna with PIN Diode Switch", Antennas,
Propagation and EM Theory, 6
th
International Symposium, pp. 66 69, May 2003.
[II.73] Kiveks O., Ollikainene J. , Vainikainen P., "Frequency tunable-internal antenna for mobile phones"
JINA, International Symposium on Antennas. Vol. 2, pp. 5356, May 2002.
[II.74] Simons R.N. , Chun D. , Katchi L.P.B., Reconfigurable array antenna using,microelectromechanical
systems (MEMS) actuators, IEEE Antennas and Propagation Society International Symposium, Vol.3, N8,
pp. 674-677, July 2001.
79
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre II : tat de l'art
[II.75] Siegel1 C.M., Gautier1 W., Ziegler1 V., Prechtel1 U., Schumacher H., "Reconfigurable Patch-Antenna
based on a very low complexity RF-MEMS technology on silicon", MEMSWave Conference, Orvietto, Italy,
June 2006.
[II.76] Schaubert D., Farrar F., Sindoris A., Hayes S.,Microstrip antennas with frequency agility and
polarization diversity ", IEEE Trans. on Antennas and Propagation, Vol. 29, Iss. 1,pp. 118-123, January 1981.
[II.77] Haskins P.M., Dahele J.S., Varactor-diode loaded passive polarisation-agile patch antenna",
Electronic Letters, Vol. 30, Iss. pp. 1074-1075, June 1994.
[II.78] Haskins P.M., Dahele J.S., Compact active polarisation-agile antenna using square patch", Electronic
Letters, Vol. 31, Iss. 16, pp. 1305-1306, August 1995.
[II.79] Boti M., Dussopt L., Laheurte J.-M., Circularly polarised antenna with switchable polarisation
sense ", Electronic Letters, Vol. 36, Iss. 18,pp. 1518-1519, August 2000.
[II.80] Yang F., Rahmat-Samii Y., A reconfigurable patch antenna using switchable slots for circular
polarization diversity", IEEE Microwave and Wireless Comp. Letters, Vol. 12, Iss. 3, pp. 96-98, March 2002.
[II.81] Scott H., Fusco V.F., Polarization agile circular wire loop antenna", Antennas and Wireless
Propagation Letters, Vol. 1, Iss. 1, pp. 64-66, May 2002.
[II.82] Nishiyama E. and Aikawa M., Polarization controlled microstrip antenna, IEEE Int. Symp. on
Antennas and Propagation, vol. 1A, pp. 68-71, Washington, USA, 2005.
[II.83] Fries M.K., Grani M., Vahldieck R., A reconfigurable slot antenna with switchable polarization",
IEEE Microwave and Wireless Components Letters, Vol. 13, Iss. 11, pp. 490-492, November 2003.
[II.84] Le Garrec L., "Etude et conception en bande millimtrique dantennes reconfigurables bases sur la
technologie des MEMS", Mmoire de thse, de lUniversit de Rennes, Novembre 2004.
[II.85] MontusclatS., Gianesello F. Gloria D., "Silicon full integrated LNA, filter and antenna system beyond
40 GHz for MMW wireless communication links in advanced CMOS technologies", RFIC Symposium, 2006
IEEE, ISBN: 0-7803-9572-7
[II.86]Pham N.T., Lee G-A., De Flaviis F., " Microstrip antenna array with beamforming network for WLAN
applications ", Antennas and Propagation Society International Symposium, 2005 IEEE, Vol. 3a, pp. 267-270,
July 2005.
[II.87] Cheng S., Ojefors, E., Hallbjorner, P., Rydberg, A., Compact reflective microstrip phase shifter for
traveling wave antenna applications ", IEEE Microwave And Wireless Components Letters, Vol. 16, No. 7,
pp. 431- 433, July 2006.
[II.88] Schlub R. W., Practical Realization of switched and Adaptative Parasitic Monople Radiating
structures, Phd report Griffith University, January 2004.
[II.89] Petit L., Dussopt L., and Laheurte J-M., MEMS-Switched Parasitic-Antenna Array for Radiation
Pattern Diversity, IEEE Trans. on Antennas and Propagation, Vol.54, N.9, pp. 2624-2631, September 2006.
80
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Chapitre III
COMPOSANTS MEMS
ans ce chapitre, diffrents types de MEMS sont prsents. Dans
une premire partie, un composant industriel de la socit
Magfusion est analys et un exemple de ralisation d'un SP4T est
donn. Avant d'intgrer ce dispositif sur une antenne reconfigurable, nous
l'avons caractris sur une ligne RF. En raison des performances mdiocres
de ce composant au-del de 8 GHz, nous nous sommes intresss la
conception de MEMS en utilisant le logiciel Coventor. A partir de l'tude
d'un MEMS lectro-thermique, nous prsentons ce flot de conception.
Enfin, nous abordons la ralisation de plusieurs composants MEMS partir
du process industriel METALMumps de la socit MEMScap. Des
commutateurs sries et shunts sont notamment prsents.
D
III.1. Composants SPDT industriels de la socit Magfusion...............82
III.2. tude de commutateurs MEMS sous le logiciel Coventor...........84
III.3. tudes bases sur le process de la Queens University de Belfast .89
III.4. Ralisations ddies de micro-structures avec le procd
MetalMumps.............................................................................................92
III.5. Conclusion...................................................................................102
81
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.1. COMPOSANTSSPDTINDUSTRIELSDELASOCIT
MAGFUSION
III.1.1. Structureetfonctionnement
LecommutateurMEMSdeMagfusion[III.1]adjtprsentauchapitreII.Ils'agitdupremier
commutateurMEMScommercialisaumonde.Nousavonsvuquesonprincipedefonctionnement
repose sur la mise en mouvement d'un balancier en matriau magntique comportant chaque
extrmituncontactlectrique.Cettepoutrevapasserd'unepositionl'autrelorsdupassaged'un
courantdansunebobinesituesouscebalancier.CecomposantestdoncunSP2T(Singlepoledual
throw,uneentre,deuxsorties).UnephotographieduboitierestprsentesurlafigureIII.1.a.A
partirdelanoticeconstructeurducomposant,onpeutextrairelespertesd'insertionpourunesrie
decomposants.Lesmesuressontralisesavecuntesteurdirectementsurleboitierducomposant
(FigureIII.1.b).Onobtientdonc6GHzuneattnuationde0,35dB.
(a)
(b)
Figure III.1: (a) Photographie du MEMS packag (b) Pertes d'insertion en fonction de la frquence
LeLETIduCEAGrenobleaainsidvelopp,surlabasedececomposantMEMS,unrseauSP4T
nonrflectifprsentantd'excellentescaractristiquessurlabandeDC2,5GHz(FigureIII.2).
(a) (b)
Figure III.2: (a) Photographie du rseau SP4T (b) Mesures des paramtres S du rseau
82
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Lespertesd'insertionsontinfrieures1dBsurcettebande.L'isolationquantelleestsuprieure
30 dB. La consommation de commutation entre deux configurations varie de 35 53 uJ et
ncessite10ms[III.2].
Avantd'intgrercecomposantsuruneantenne,nousnoussommesintressssescaractristiques
frequentielles.Pourcela,nousavonsconuundispositifdetestpourl'valuernotammentaudessus
de8GHz.
III.1.2. Caractrisationsursubstratalumine
Le composant a donc t plac sur un substrat alumine d'paisseur 0,636mm et de permittivit
r
=9,8.LemasquengatifetunephotographieduprototypesontprsentssurlafigureIII.3.Les
deuxplotsDC+etDCpermettentdepolariserleMEMS.L'entreduSPDTsefaitsurleport1et
les deux sorties sur les ports 2 et 3. Le composant Magfusion est implant sur la plaquette en
utilisant de la soudure liquide type Colle Epoxy Conductrice de la socit CircuitWorks. La
plaquetteestensuitepasseaufourpendant1heureenviron.
(a)
(b)
Figure III.3: (a) Masque et (b) photographie du circuit test du MEMS
Lesmesuresdel'adaptationsurlesports1,2et3sontprsentessurlafigureIII.4.a.Latensionde
commutationestde3V,laconsommationestalorsde20mA.L'adaptationmesureestinfrieure
15dBsurpresquetoutelabandeentre500MHzet7,5GHz.Unemauvaiseadaptationestsignaler
autourde3,5GHz.L'isolationetlespertesd'insertionsurlesdeuxports(S
21
etS
31
)sontprsentes
sur la figure III.4.b. L'isolation est meilleure que 30 dB jusqu' 10 GHz, ce qui est largement
suprieurauxperformancesd'unediodePIN.Lespertesd'insertionsontinfrieures0,6dBjusqu'
5,5GHzcequiesttrscorrectcomptetenudestransitionssurlesguidesd'ondecoplanaires(CPW)
etlessondescoaxiales.
Ce composant prsente donc des caractristiques suprieures aux composants semiconducteurs
jusqu'6GHz.Plushautenfrquence,lesperformancessedgradenttrsvite,lespertesd'insertion
duMEMSsontde3dB9,5GHz.Onsecontenteradoncd'utilisercecomposantsurlabandeDC
6GHz.Autourde3,5GHzl'adaptationestmdiocre.
Lebotiermtalliqueestunfacteurquirendradifficilel'intgrationdecetypedecomposantsurdes
antennes (couplage potentiel important). Cependant, il est possible de le placer dans un circuit
d'alimentationentantqu'aiguilleurdesignal.Unexempled'intgrationdecedispositifdansune
antennereconfigurableseraprsentdanslechapitreIV.
83
Port 2
Port 3
Port 1
DC+
DC-
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
(a)
(b)
Figure III.4: (a) Adaptation (b) Pertes d'insertion en fonction de la frquence
III.2. TUDEDECOMMUTATEURSMEMSSOUSLELOGICIEL
COVENTOR
Un certain nombre d'tudes du comportement mcanique de MEMS ont t ralises avec le
processdelaQueensUniversitydeBelfastetceluiduLETI.Pourcefaire,nousavonsutilisun
logicielddilasimulationlectromcanique,lesimulateurCoventor[III.3].
III.2.1. PrsentationdusimulateurCoventor
Ce logiciel utilise comme moteur de simulation mcanique les algorithmes du logiciel ANSYS,
ddilasimulationmcaniqueparlamthodedes lmentsfinis.AinsiCoventorbnficiede
touslestravauxquiontteffectuspourlamodlisationparlmentsfinis.Cettemethodeat
dveloppe dans les annes 1950 pour l'tude du comportement mcanique des structures
avioniques.Lelogicielestdivisenquatremodulesdistincts:
Architect propose une vue du MEMS au niveau systme et permet de raliser des
simulationscomportementalesdelastructure.
Designerpermetpartirdelastructuretudiesousarchitectdecrerlemasquedela
structureetunmodleen3dimensions.
Analyser est un solveur lments finis qui permet partir d'une structure 3D de
dformerlastructureduMEMSenfonctiondediffrentstypesd'actuation(lectrostatique,
thermique...).
SystemBuilderproposepartird'unmodledesimulationsousAnalyserd'extraireun
macromodlesimulablesousArchitect.
LelogicielCoventorpermetdoncunetudecompltedel'aspectmcaniquedesMEMSdepuisune
modlisation haut niveau jusqu' une simulation lments finis, en fournissant en entre les
matriauxutiliss,leurscaractristiquesetlagomtriedelastructure.
84
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.2.2. FlotdeconceptionpourunMEMSlectrothermique
LeMEMSactionnementthermolectriqueduLETIadjtdcritdanslechapitreII.Toutes
lesinformationsrelativescecomposantsontrsumsdanslespublications[III.45].Nousnous
intressonsceMEMScarilregroupelesdeux principaux phnomnesphysiquesutilisspour
l'activation: l'attraction lectrostatique et le bilame thermique. La ligne RF est donc coupe au
niveauduMEMS(FigureIII.5.a).Lorsquelepontestcommut,uncontacteurenOrcomblelegap
sur la ligne de signal RF. La membrane est constitue de nitrure de silicium et une couche
d'aluminiumestajouteauxextrmitsdupontpourraliserlebilamed'activation.Lenitrurede
silicium Si
3
N
4
et l'aluminium ont un facteur d'extension thermique trs loign (rapport de 30,
tableauII.2).CommeonpeutlevoirsurlafigureIII.5.b,lastructureaunecontraintersiduellequi
tendreleverlepontetpermetdoncunemeilleureisolationpourlecommutateur.
(a)
(b)
Figure III.5: Photographie du contact srie (a) et du bilame (b) du MEMS lctro-thermique
Dansunpremiertemps,leMEMSatconudupointdevuefonctionnelsousArchitect(Figure
III.6.a). La structure est dcrite d'un point de vue mcanique et lectrique. Chaque lment
mcaniquedetypepoutre(beam)possde2portsd'entresortie.Chaqueportestunbusde6
donnesquidcriventles6degrsdelibertdansl'espace(x,y,z,rx,ry,rz).Unlmentmodlise
lecomportementlastiqueauxdeuxextrmitsdelapoutre.Pouramliorerlafinessedumodle,il
estpossibledediscrtiserlepontentierenplusieurspetitespoutres.
PourmodliserlephnomnedecontactentrelapoutreetlaligneRF,uncomposantdcrivantde
manireanalytiquecetteinteractionestajoutaucentredupont(FigureIII.6.b).
L'actionneurthermiqueserasuperposaupontauniveaudesesextrmits(beam_actuator)comme
sur la figure III.6.c. Le modle de l'activateur thermique dforme la structure en fonction d'une
contrainteadditionnellesurlacouchesuprieuredubilame.
Pourliercettecontraintedubilame(
bilame
)unetemprature,ilsuffitdenormaliserlebilamepar
rapportauxcoefficientsd'extensionthermique etauxmodulesdeYoungEdesdeuxmatriaux
(cf.relationIII.1).Lacontrainteseradesignepositifpuisqu'onaiciunecontrainted'tirement.
T
bilame
=
bilame
Ni
3
Si
4
E
Ni
3
Si
4
Al
E
Alu
(III.1)
Le logiciel Coventor ne permet pas d'un point de vue comportemental de raliser une tude de
conduction thermique sur une structure. Nous avons donc associ une rsistance de 100 et un
gnrateur de tension. A partir du courant dissip dans cette rsistance, on calcule la puissance
induite en appliquant un coefficient arbitraire pour obtenir une temprature. A ce niveau de
description, le modle ne prendra pas en compte le temps de diffusion calorifique dans tout le
bilame.
85
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Auniveaudumaintienlectrostatique,onassocielespoutresdeslmentsdetypelectrodequi
vont modliser le comportement lectromcanique de la structure. En fonction de la tension
appliqueaudeuxbornesdel'lectrode,cetlmentvainduireuneforced'attractionsurlastructure
etainsiladformer.
(a)
(b) (c)
Figure III.6: Modlisation comportementale sous Architect (a) Structure complte (b) Contacteur
(c) Actionneur thermique et lectrique
A partir de ce modle analytique, on peut raliser une simulation de la structure. Le principal
avantagedecetypedemodleestlarapiditdesimulationquiseraenmoyenne1000 plusfois
rapidequ'unesimulationdetypelmentsfinis.
SurlafigureIII.7,onpeutvoirlecomportementducentredupontsuivantl'axezenfonctionde
diffrentestensionsd'activation.
86
Figure III.7: Activation thermique de la structure
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Onpeutdjobserverqu'enl'absencedetension,lastructureestbiendformeverslehautdeplus
de 0,5um en raison de la contrainte rsiduelle du bilame. Cette dformation est utilise par les
concepteurs pour accrotre l'isolation du commutateur. Lorsqu'une tension est ajoute sur
l'activateur, celleci engendre une contrainte additive sur le bilame. Celuici est bien de signe
positif,c'estunecontrainted'tirement.Onobservesurnotremodlequ'avecunetensionde1,8Vle
contacteurduMEMSentreencontactaveclaligneRF.Cettetensioncorrespondunecontrainte
de139Gpa.
SurlafigureIII.8 unesimulationtemporelleducommutateurestprsente.Lacourbedecouleur
verte donne le comportement du pont au niveau des lectrodes de maintien suivant l'axe Z. La
courbedecouleurorangeprsentelecomportementauniveauducontacteursuivantl'axeZ.At=0,
onappliqueunetensionde3Vsurl'activateurthermique,leMEMScommuteenunpeumoinsde
100s.Letempsdecommutationreldececomposantestde250smaisnotresimulationnetient
pascomptedeladiffusioncalorifiquedanslebilamecequiexpliqueladiffrence.Onpeutvoirque
lecontactsefaitauniveauducontacteuralorsqueleslectrodesrestentespacesd'environ0,2um.
Onappliquealorsunetensionsurl'lectrodedemaintiende12V.Leslectrodesseplaquentalors
surleplandemassedelaligneCPW.Lecontacteurresteparfaitementcommut.Latensionaux
bornes de l'activateur thermique est alors ramene 0V. Le systme a alors commut et ne
consommedslorsplusd'nergie.Onpeutalorsdduirel'nergiencessaireunecommutationdu
MEMS(III.2)enngligeantl'nergiedepolarisationdeslectrodesdemaintien.
E
comm
=
V
2
R
t
comm
=9 J (III.2)
At=300s,onsupprimelatensiondemaintien,lastructurerevientsontatd'origineenunpeu
plusde130salorsquelesmesuresdonnent160s.
Une simulation pour observer la tension d'activation en utilisant uniquement la tension
lectrostatiqueatralise.LeMEMScommutealors28,2V.
87
Figure III.8: Comportement dynamique de la structure
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Dansundeuximetemps,lemasquedelastructureestextraitdumodlecomportementalpartir
del'outilDesigner(figureIII.9.a).Unmodleen3Destsynthtisetmailldemanireassezfine
(cubiquede2*2*2m)pourlasimulation(FigureIII.9.b).
(a)
(b)
Figure III.9: (a) Masque de la structure (b) Modle 3D de la structure avec son maillage
On peut enfin partir du module Analyser, raliser une simulationdetype lments finis dela
structure pour confirmer les rsultats prcdemment acquis sous Architect (Figure III.10). On
dduit ainsi qu'une contrainte de 144 Gpa est ncessaire pour commuter la structure. Au niveau
lectrostatique,unetensionde26,3VseraitncessairepouractiverleMEMSsansutiliserlebilame.
Les rsultatsavec les deuxtypes de simulateursont doncbien cohrents etsont conformesaux
mesuresralisesetpubliesparleLETI[III.4,5].
Nousavonssuiviceflotdeconceptionpourtouteslestudesquenousavonsralisesparlasuite.
88
Figure III.10: Simulation lments finis sous Analyser
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.3. TUDESBASESSURLEPROCESSDELAQUEENS
UNIVERSITYDEBELFAST
LacollaborationaveclaQueensUniversitydeBelfastnousaamenraliserdesprtudesen
utilisantleurprocddefabricationdesMEMS.CeluiciestcomposedelignesRFentungstneet
de structures mobiles en Or. Le dveloppement de leur process n'a commenc que fin 2005.
L'objectiftaitd'abaisserlatensiond'activationdestructuresdetypecapacitifparl'utilisationde
ressortsd'ancrageenserpentin.Plusieurstudesontdjtmenes.Nouspouvonsparexemple
citerPeroulis [III.6],quiadmontrqu'augmenterlenombredeserpentinspermetderduirele
coefficientderaideurdelamembranemobile.LafigureIII.11.bprsentelesrsultatsdesimulation
delaraideurenfonctiondunombredeserpentins.Onconstatequel'amliorationducoefficientde
raideurserduitaufurmesurequelenombredeserpentinsaugmente.Unboncompromisentrele
nombredeserpentinsetl'amliorationdelaraideursesituedoncentre2et3serpentins.
(a)
(b)
Figure III.11: (a) Serpentins mcaniques rduisant la raideur de la structure (b) Coefficient de
raideur de la structure en fonction du nombre de serpentins
Apartirdecesacquis,nousnoussommesintresssoptimiserlepositionnementdelaconnexion
entre le ressort et la membrane. Nous avons notamment conu deux modles de commutateurs.
Pourlepremier,leserpentinestconnectl'extrmitdelamembrane(FigureIII.12.a).Pourle
deuxime,leserpentinaunelongueurdeplusetseconnecteaumilieudelamembrane(Figure
III.12.b).Ondiraqu'ilestcomposde1,5serpentins.
UnesimulationFEMsousAnalyseratraliseetadonnpourlepremiermodleunetension
d'activation de 17 V et pour le deuxime une tension d'activation de 13V. Ces rsultats sont
parfaitementcohrentspuisquelenombredeserpentinsestsuprieurpourlesecondmodle.
89
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
(a) (b)
Figure III.12: (a) Membrane MEMS avec 1 serpentin (b) (a) Membrane MEMS avec 1.5 serpentin
Nousnoussommesintresssl'empreinteduMEMScommut,c'estdirelarpartitiondes
pressionsengendresparlamembranecommutesurlaligneCPW.Muldavinamontr[III.7]que
pour augmenter la fiabilit et la reproductibilit des commutations, il faut s'attacher avoir un
contact le plus important possible au niveau de la ligne de signal. Les lectrodes doivent tre
suffisammentlargespourassureruneforced'attractionimportanteavecleplandemassedelaligne
CPW.
LafigureIII.13.aetIII.13.bdonnelarpartitiondel'empruntedepressionlaisseparlesdeuxtypes
destructures.Ladeuximestructureconcentranttrsnettementlapressionauniveaudelalignede
signal,estplusadaptepourl'architectureducommutateur.
Le mise au point du process ayant malheureusement pris du retard au sein de notre partenaire,
aucunecomparaisonavecdesmesuresdestructuresoprationnellesn'aputreralisecejour.
(a)
(b)
Figure III.13: Empreinte aprs commutation de la membrane pour la structure (a) 1 serpentin et
(b) 1.5 serpentin
90
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.4. RALISATIONSDDIESDEMICROSTRUCTURESAVECLE
PROCDMETALMUMPS
Pour permettre une ralisation de nos structures, nous avons choisi de faire appel un fondeur
industrieletunprocessdjoprationneladaptlaconceptiondestructuresMEMS,savoirla
technologieMETALMUMPSdveloppeparlasocitMEMScap[III.8].
III.4.1. ProcessddiMumps+
III.4.1.1.Dtailduprocess
LasocitMEMSCAP,parl'intermdiairedesonprogrammeMUMPS+,permetdepersonnaliser
un certain nombre de paramtres du process (paisseur des couches, matriaux ...). Nous avons
doncpuutiliserceprogrammepourpersonnaliserleprocessMETALMUMPS.Lesubstratutilis
estunsubstratSiliciumhautersistivit(>5k.cm).
Les tapes principales du process sont prsentes sur la figure III.14 et les diffrentes
caractristiquesdescouchessontdonnesdansletableauIII.1.
Unpremieroxydeditoxyded'isolationestpitaxisurlewaferdeSiliciumavecunepaisseurde
2m.Unedeuximepaisseurd'oxydede0,5mdetypePSG(PhosphoSilicateGlass)estdpose
partechniqueLPCVD(LowPressureChemicalVaporDeposition)bassetemprature.Cesdeux
oxydesontunestructurecristallinediffrente,ilssontainsiplusoumoinsrsistantsauxattaques
chimiques. Lorsqu'au final, les structures MEMS seront relches, une solution base d'acide
hydrofluoric(HF)serautilise.Cellecigraveracinqfoisplusrapidementl'oxydePSGquel'oxyde
d'isolation. Lorsque des couches recouvertes par un autre matriau rsistant au HF comme l'Or
seront attaques, l'oxyde PSG seragrav sous l'Orsur une distance de120malorsque l'oxyde
d'isolationneseragravquesur25mdedistance.Cecipermettrademaintenirancrescertaines
parties de la structure (les supports mcaniques) alors que d'autres parties seront totalement
suspendues.
Parlasuite,unecouchedepolysiliciumde2mestdposeetpriseensandwichpardeuxcouches
deNitruredeSiliciumSi
3
N
4
de0,35umd'paisseur(FigureIII.14.2).Cestroiscouchespermettront
decrerdesmembranessuspenduesavecungradientdecontraintersiduelletrsfaible.Eneffet,
departlasymtriedecettecouche,lacontraintersiduelle nedpendraquedeladiffrencede
contrainteentrelesdeuxcouchesdeNitrure.
Unenouvellecouched'oxydePSGestalorsdposesurunepaisseurde2,7m(FigureIII.14.3).
Cettecoucheestgraveauxendroitsolastructuresuprieuredevratreancreausubstrat.Un
mtal dit d'adhsion compos de Chrome (Cr) et de Platine (Pt) est alors dpos sur 0,032m.
Enfin,unepaisseurde7md'orestdposepuisgrave.
Infine,laralisationestplongedansunbaindeHFpoursupprimerl'oxydeetainsirelcherles
diffrentesstructures.
Leswaferssontenfindcoupsetexpdisauclient.
DansletableauIII.1,onpeutvoirlamarged'erreurpourlesdiffrentescouchesdansleprocessnon
personnalis,ainsiquelacontrainteetlarsistivitdecertainsmatriaux.Enmoyenne,laprcision
pourl'paisseurdesdiffrentescouchesserade+/10%.Larsistancepardfautdupolysilicium
estde10/ .Maisdansnotrepersonnalisation,nousavonschoisid'augmentersonpaisseurd'un
91
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
rapport3etd'utiliserundopantplusefficacepourrduireencorelarsistivitd'unfacteur3.Nous
attendonsdoncunersistivitpourlepolysiliciumdel'ordrede1/ .
Couches
(ordrede
dposition)
paisseur(nm)
Min Typique Max
contrain
te(Gpa)
Rsistivit
( / )
ProcessMUMPS+personnalis
pourleLEAT:paisseurtypique
(nm)
oxyde
d'isolation
1900 2000 2100 2000
oxyde 450 500 550 500
Ni
3
Si
4
315 350 365 90 350
Polysilicium 630 700 770 10 2000
Ni
3
Si
4
315 350 365 90 350
oxyde2 990 1100 1210 2700
Mtal
d'adhsion
32 35 38 35
Cuivre 495 550 605 550
Mtal 17000 20000 23000 100 0.008 7000(Or)
Tableau III.1: Caractristiques des diffrentes couches du process MetalMumps et du process
personnalis pour le LEAT
SurlafigureIII.15.a,l'effetdelagravurel'acidehydrofluoriqueestclairementvisible.Lazone
roseestlapartiedelaralisationol'oxyded'isolationatgrav.Ainsi,l'oxyded'isolationest
gravsurunedistancede35malorsque25mtaitprvu.Onpeutsupposerquepourassurerun
relchement total de toutes les structures, la socit MEMScap a prolong le bain dans l'acide
pendantuneduresuprieureauxdonnestechnologiques.
92
Figure III.14: Diffrentes tapes du process METALPUMPS
1. Wafer de Si + SiO2 (2um+0.5um) 2. SiNi (0.35um) + poly (2um)
3. SiO2 (2.5um) + mtal(7um) 4. Gravure HF
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
LafigureIII.15.bpermetd'observerlacontraintedelacouched'or.Cettemicrotopographieat
ralise au spectromtre confocal par la socit Lancaster Monaco [III.9]. La membrane
horizontaleestrelcheetancresesextrmitsparlesdeuxplotsenvert.Onobserveainsiquela
membrane se relve en son centre (couleur rouge), nous donnons son profil dans la suite de ce
paragraphe.
(a) (b)
Figure III.15: (a) Vue de la gravure de l'oxyde en rose (b) Contrainte de la membrane en Or
UnemesuretransversaledureliefduMEMSestprsentesurlafigureIII.16.Unpalierde2,3m
estvisibleauniveauducentredupont.Celuiciestdaupontverticalenpolysiliciumquicroisela
pont en Or. On peut ainsi mesurer prcisment que la membrane est releve de 4,5m en son
centreparrapportsesextrmits.ParunesimulationsouslelogicielCoventor,onpeutdduire
quelacouched'oraunecontraintersiduellede167Gpacequiestsuprieurnosprvisions(100
Gpa).
Figure III.16: Mesure transversale du relief du pont MEMS
PlusieursstructuresMEMSonttralisessurceprocess.Nousavonspubnficierd'unsubstrat
de1*3cmpournotrepremierRun.
III.4.2. ConceptiondesstructuresMEMS
Surlabasedeceprocess,nousavonsdoncconudescommutateursMEMSsriesetshunts.Dans
un premier temps, nous allons prsenter la ligne de propagation qui sera utilise avec les
93
0 0.5 1 1.5 2 mm
mm
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
m
0
2
4
6
8
10
12
14
16
18
20
22
m
-15
-10
-5
0
5
10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 mm
Longueur = 2.004 mm Pt = 17.61 m Echel l e = 30 m
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
commutateurs, puis nous prsenteront indpendamment les deux architectures. La simulation
lectromagntiquedeslignesatralisel'aidedulogicielHFSS[III.10].
III.4.2.1.1.Lignedepropagation
III.4.2.1.1. Conceptiondeslignes
Dans le cas assezparticulier de notre process, laligne de propagation CPW sera ralise surle
dernier niveau de mtal (Or). La partie mobile du systme sera situe sur la couche
Si
3
N
4
/Poly/Si
3
N
4
,etseradoncplaceentrelalignedepropagationetlesubstrat.Lesupportdela
ligneCPWvadoncvarieretilfaudraadapterlalargeurdecettelignedesignalpourconserverune
impdancede50.
Nous pouvons distinguer deux cas pour la ligne de propagation. Dans le cas gnral, la ligne
reposera directement sur les deux couches de Nitrure (figure III.17.a). Par une simulation sous
HFSS,ontrouveuneimpdancede50avecunelargeurdelignede26umetunelargeurdegapde
17m.Lorsquel'onseplacedanslecasolamembraneNitrure/Polyestsuspendue,laligneCPW
seraelleaussisuspendueavecungapde2,7md'air(FigureIII.17.b).Lagomtriedelalignepour
avoiruneimpdancecaractristiquede50estalorsde54mavecungapde18um.
(a) (b)
Figure III.17: Ligne de transmission plaque (a) et suspendue (b)
De plus, comme dans le cas gnral, on utilisera la ligne plaque et que, au niveau du MEMS, il
faudra utiliser l'architecture suspendue, il a fallu mettre au point une transition avec un minimum de
pertes (Figure III.18.a). Sous HFSS, nous avons simul une perte infrieure 0,015 dB pour une
telle transition.
Le fait d'avoir deux types de ligne peut tre mis profit dans certains cas o des lignes d'impdances
caractristiques diffrentes sont ncessaires, par exemple dans le cas d'un diviseur o des impdances
caractristiques allant de 25 105 sont indispensables. Dans un souci de rduction de taille, il
est possible d'utiliser alternativement l'une ou l'autre des architectures pour maintenir des tailles de
transition acceptables. Le modle HFSS d'un diviseur un vers cinq est prsent sur la figure III.18.b.
94
Silicon (4k.cm) 675 um
Si3N4 0.35 um
Si3N4 0.35 um
Polysilicon 2 um
2
.
7
u
m
2
.
5
u
m
Au 7 um
54um
18um
Silicon (4k.cm) 675 um
SiO2 2.5 um
Si3N4 0.35 um
Si3N4 0.35 um
Au 7 um
26um
17um
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
(a) (b)
Figure III.18: (a) Transition entre une ligne plaque et suspendue (b) Diviseur de puissance par 5
III.4.2.1.2. Mesuredeslignes
Laligneseuleetlatransitionontainsitmesuresautourde60GHzaulaboratoireduVTT
Helsinki.SurlafigureIII.19.asontprsenteslesmesurespourlaligneseuled'unelongueurde1
mm.Lespertesmesuressontde0,4dBcequinousdonne60GHzuneattnuationde0,6dB/.
La figure III.19.bprsente l'attnuation pour une ligne suspendue avecdeuxtransitions versdes
lignesplaques(longueurtotalede500m).Lespertesd'insertionsontdel'ordrede0,45dB.Iln'a
pastpossibledemesurerlespertespourunelignesuspendueseulepuisquelesplotsdemesures
sontforcementplaqussurlaligneparcontraintemcanique.
(a)
(b)
Figure III.19: (a) Mesure pour une ligne plaqu (b) Mesure pour une ligne suspendue avec deux
transitions vers des lignes plaques
A partir de ces lignes de propagation, il est dsormais possible de concevoir des systmes
mcaniquespourlaisserpasserourflchirlesondeslctromagntiques.
95
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.4.2.2.2.MEMSsrie
Lapremirearchitectureproposeiciestdoncunetopologiesrie.Laconceptionsediviseendeux
phases, une premire approche lectromagntique sous le logiciel HFSS, puis une deuxime
approchelectromcaniquesouslelogicielCoventor.
III.4.2.2.1. tudelectromagntiquedesstructures
LaligneCPWestdoncformed'unelignesuspenduecoupeensoncentreparungapde20msur
lalignedesignal.LastructureMEMSestcomposed'unemembranemobileavecdeuxlectrodes
de200*200menpolysiliciumrecouvertesdeNitrurepourvitertoutcontactDC.Ensoncentre,
uncontactenpolysiliciumnonrecouvertdeNitrurepermettraderaliserlecontactsrieetainside
comblerlegapsurlalignedesignalRF.
Lamembranemobileestrelieausubstratparl'intermdiaired'unserpentinenpolysilicium/Nitrure
ol'onviendrapolariserl'lectrodedelamembrane.
LemodlesousHFSSestprsentsurlafigureIII.20.a.Lasimulationtientcomptedel'effetde
peau.OnpeutvoirsurlafigureIII.20.blespertesd'insertionetl'isolationsimulessurleport2.
(a)
(b)
Figure III.20: (a) Modle et (b) Simulation du MEMS
III.4.2.2.2. tudemcaniquedesstructures
Unetudelctromcaniqueaaussitmenesurcecomposant.Ilconvientdenoterquecette
structure est un peu plus complexe que dans le cas usuel, puisqu'ici, la fois la membrane du
MEMSetleslignessontsuspenduesetdoiventtreprisesencompte.
Pourlamembranemobile,malgrlalongueurdesserpentins,laforcederappelrestetrscorrecte
grceaumoduled'Youngtrsimportantdesmatriauxquilacomposent(PolysiliciumetNitrure
deSilicium).
Un premier modle sous Architect a t conu (Figure III.21). La simulation donne une tension
d'activationde23VpourfairecommuterleMEMS.
96
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
ApartirdecemodleArchitect,unemodlisation3DatsynthtisepartirdeDesignerpuis
unesimulationlmentsfinisatralisesousAnalyser(FigureIII.22).Unetensiond'activation
de25Vaalorstobtenue,confirmantl'ordredegrandeurcalculprcdemment.
(a) (b)
Figure III.22: Simulation lments finis du commutateur pour un tension de (a) 0V et (b) 24V
Unboncontactsrieestobtenuauniveauducontacteur(FigureIII.23.a).Lessimulationsdonnent
unepressioninduiteparlecontacteursurlalignede0,1Mpa(FigureIII.23.b).
(a)
(b)
Figure III.23: Contact srie du switch (a) et (b) visualisation de la pression induite sur la ligne
97
Figure III.21: Modlisation comportementale du commutateur srie
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
EnfinlelogicielCoventornousapermisd'avoiruneprvisualisationdel'aspectfinalduMEMS,
puisqu'ilestpossibled'importerdirectementlesmasquesderalisationetdesynthtiserunmodle
3D(FigureIII.24).OnpeutvoirsurlesctsduMEMSlesplotsdepolarisationquipermettront
d'alimenter les lectrodes. Il n'a malheureusement pas t possible de raliser des simulations
partir de ce modle car le niveau de dtail est trop lev et une telle simulation aurait t trop
gourmandeenmmoire.
AufinalceMEMSoccupeunetaillede400*250m,latensiond'activationprvueestde25V.Les
pertesd'insertionunefoiscommutevontavanttoutdpendredelaconductivitdupolysiliciumet
delaqualitducontactentrelepolysiliciumetl'or.Lesprvisionsdespertesd'insertions60GHz
sont de 0,6dB si la conductivit du polysilicium est de 1/ . Lorsque le MEMS est relev,
l'isolationsimuleestsuprieure25dB.
III.4.2.2.3. Ralisationdelastructureetmesure
Lastructureraliseatobservel'aided'unspectromtreconfocal(FigureIII.25.a).
(a)
(b)
Figure III.25: (a) Microtopographie du MEMS srie et (b) vue 3D
98
0 0.2 0.4 0.6 0.8 1 mm
mm
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
m
0
2
4
6
8
10
12
14
16
18
20
Figure III.24: Modle 3D partir des masques finaux de ralisation
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
Elle prsente une bonne uniformit. La ligne de polarisation en polysilicium, qui contourne la
structureetpermetd'avoirlesdeuxlectrodesconnectesaummepotentielDC,sesituesurlebas
delafigureIII.26.aetsurladroitedelafigureIII.26.b(vue3D).
Unemesuredurelieftransversal(rugosit)suivantl'axexetcentrsurlegapdelalignedesignal
estprsentesurlafigureIII.26.Lecontactsrietantcomposdedeuxlignesenpolysilicium,on
peutvoirleursreliefsauniveaudugap(0,52mmet0,56mm).
Figure III.26: Mesure transversale du relief du MEMS srie
LesmesuresdeceMEMSonttralisesenpartieaulaboratoireduVTTHelsinkietenpartie
aulaboratoireduL2MPMarseille.
AulaboratoireduVTT,seuleslesmesurespassives(MEMSenpositionOFF)ontputreralises
dansunebande[50,80GHz].LesmesuresetlessimulationssousHFSSsontprsentssurlafigure
III.27.Lessimulationsetlesmesuressontentrsbonneadquation,l'isolationestsuprieure20
dBsurtoutelabande.
LesmesuresdesMEMScommutsontputreralisesaulaboratoireduL2MP.Unetensionde
35Vatncessairepoureffectuerlacommutation.Lesmesuresducomposantcommutn'ontpu
treralisesquejusqu'35GHzcarunbloqueurdetensionDCaustandardSMAtaitncessaire
pourprotgerl'analyseur.LesmesuressontprsentessurlafigureIII.28.Lespertesd'insertion
99
Figure III.27: Simulations et mesures du MEMS srie non commut
m
-20
-15
-10
-5
0
5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 mm
Longueur = 1.15 mm Pt = 15.69 m Echel l e = 30 m
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
sontpluslevesqueprvues,del'ordrede1dBalorsquelessimulationsdonnaientdespertesde
l'ordrede0,3dB.Cependantl'isolationesttoujourssuprieure15dB.Onpeutdoncsupposerque
lepolysiliciumestplusrsistifquedansnosprvisions(1/),cequiseravrifiultrieurement.
III.4.2.2.4. 3.MEMSshunt,ralisationetmesure
L'architectureducommutateurshuntreposesurlammeapprochequecelledcriteprcdemment.
Le masque de la ralisation est prsent sur la figure III.29. La principale diffrence avec
l'architectureprcdenteestquelalignedesignaln'estpascoupe.
Figure III.29: Masque du MEMS shunt
100
Figure III.28: Simulations et mesures du MEMS srie aprs commutation
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
LesmesurespassivesdelastructuresontprsentessurlafigureIII.30.Lespertesd'insertion60
GHzsontde0,45dBcequicorrespondl'tatdel'artactuel [III.11].L'isolationestquantelle
suprieure20dBsurtoutelabande.
Pourlesmesuresaprscommutation,unetensionde38VatncessairepouractiverleMEMS.
Lesmesuresetsimulationjusqu'35GHzsontprsentessurlafigureIII.31,ellessontbienen
adquation.Onpeutainsivoirquelecourtcircuitestplusfrancversleshautesfrquencesalorsque
celuicilaissepasserunepartiedel'nergiejusqu'10GHz.
101
Figure III.30: Simulations et mesures du MEMS parallle non commut
Figure III.31: Simulations et mesures du commutateur parallle aprs commutation
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
III.4.2.3.ConclusionetperspectivespourlesralisationsMEMS
DenombreuxproblmesderalisationonttrencontrsavecleprocessdelasocitMEMScap.
Le dfaut principal provient d'une mauvaise connection lectrique entre les couches Or et
Polysiliciumnepermettantpasd'amenerlabonnepolarisationauxlectrodesetainsi,d'activerles
MEMS.Uneexplicationpossibleestquelecuivre,utilisdansleprocess,auraitgalementdiffus
dansl'OrmalgrlabarriredeNickel,crantainsiunisolantentrelacouchedepolysiliciumet
d'Or.
Ilnousestdoncapparuplussagedenousadresserpourlesfuturesralisationsdesprocessplus
transparents en terme de communication. De part notre partenariat privilgi avec l'Universit
d'Helsinki,nousnoussommestoutnaturellementadressseux.Leurprocessestoprationneletils
ontdjralisdesdphaseurs.Laseulelimitedeleurprocdestqu'ilsnepeuventpasassurerune
commutationfranche,leurrapportcapacitifentrel'tathautetbasselimitantunrapportde5.Ils
ontcependantacquislestechniquespourraliserdesvaractorsdegrandequalit.Nousutiliserons
donccetypedecomposantsdansnosfuturesralisations.
III.5. CONCLUSION
Danscechapitre,nousavonsprsentlesdiffrentscomposantsentechnologieMEMSquenous
avonstudidurantcettethse.UnpremierMEMSindustrieldelasocitMagfusionatreport
surunsubstratetmesur.Lesrsultatsmontrentdesperformancessuprieuresleursquivalents
semiconducteurs. Le logiciel de simulation mcanique Coventor a ensuite t prsent avec
plusieurs exemples de modlisation. Enfin, nous avons dtaill le procd MEMS de la socit
MEMSCAP que nous avons utilis pour fabriquer nos propres architectures de MEMS. Ainsi
diffrents types de commutateurs (srie et shunt) et un varactor ont t conus, fabriqus et
mesurs.
Nousallonsmaintenantnousintresserauxapplicationsquipeuventtreenvisagespartirdeces
diffrentscomposants.
102
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre III : Composants MEMS
RfrencesChapitreIII
[III.1]Magfusion.,www.magfusion.com,2004.
[III.2] Dussopt L., Lafoy S., Fond E., "A DC-3 GHz Bistable Non-Reflective SP4T
MEMS Switch", MEMSwave Conference, Orvietto, Italy, June 2006.
[III.3] Coventor Software, www.coventor.com, Cary, NC, 2006.
[III.4] Robert P., Saias D., Billard C. Boret S., Sillon N., Maeder-Pachurka C., Charvet P.L., Bouche G.,
Ancey P., and Berruyer P., "Integrated RF-MEMS switch based on a combination of thermal and electrostatic
actuation", Transducers 2003, Boston, June 2003.
[III.5] Billard C., Charvet P. L., Fort C., "RF MEMS Thermally Actuated Switch for Communication
Systems", European Workshop on integrated Radio Communication Systems, Angers, France, May 6-7
2002.
[III.6] Peroulis D. "RF MEMS Devices for multifonctional integrated circuits and antennas", PhD thesis,
University of Michigan, 2003.
[III.7] Muldavin J. B., Rebeiz G., "High Isolation CPW MEMS Shunt Switches Part 1: Modeling", IEEE
trans. on Microwave Theory and Techniques, Vol. 48, Is. 6, pp. 1045-1052, June 2000.
[III.8] MEMScap SA, www.MEMScap.com, Bernin, 2006.
[III.9] Lancaster, www.coty.com, Monaco, 2007.
[III.10] HFSS, www.ansoft.com, Pittsburgh, PA, 2006.
[III.11] Chan R., Lesnick R., Caruth D., Feng M., "Ultra broadband MEMS switch on silicon and GaAs
Substrates", International conference on compound semiconductor, Chicago, 2003.
103
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Chapitre IV
ANTENNES A
POLARISATION
COMMANDEE
ans ce chapitre, de nouvelles architectures d'antennes
polarisation circulaire et reconfigurables en polarisation sont
prsentes. Ces antennes utilisent les composants actifs dcrits
dans les chapitres prcdents. La premire antenne est ddie la
communication satellitaire. Une deuxime ralisation base de MEMS
permettra de commuter le rayonnement d'une antenne entre deux
polarisations linaires orthogonales. Par la suite nous prsentons un
coupleur quasi-discret reconfigurable ainsi que plusieurs applications
permettant de modifier de faon dynamique la polarisation de l'onde
rayonne d'une antenne.
D
IV.1. Antenne polarisation circulaire double bande..............106
IV.2. Antenne double polarisation linaire avec commutateur
SPDT MEMS ..............................................................................113
IV.3. Hybride semi-discret reconfigurable................................116
IV.4. Antenne diversit de polarisation..................................129
IV.5. Antenne reconfigurable en polarisation linaire.............136
IV.6. Conclusion........................................................................138
105
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.1. ANTENNEPOLARISATIONCIRCULAIREDOUBLEBANDE
IV.1.1. Introduction
L'objectiftaitdedvelopperuneantenneimprime(patch)destinetreplaceaufoyerd'une
parabolede34mdediamtrefonctionnantdansunestationsolpoursatellitesmtorologiques
dutypeMtosat.CessatellitesmettentactuellementenbandeL,maisdevraientprochainement
mettregalementenbandeX.L'antenneconcevoirdoitdoncpouvoirfonctionnerdanslesbandes
defrquencesuivantes:
Frquences Bandepassante BPen% Polarisation
BandeL 1,6981,709GHz 11MHz 0,65% circulairedroite
BandeX 88,4GHz 400MHz 4,90% circulairedroiteetgauche
Tableau 1: Cahier des charges de l'antenne
Lerapportd'ondestationnaire(ROS)souhaitdanschacunedecesbandesdoittreinfrieur2,ce
qui correspond 10 % de la puissance incidente rflchie sur le port d'entre de l'antenne
considre.
Latailleduplandemasseenvisageesttypiquementdel'ordrede10*10cm.Cetencombrementne
constituepasunproblmecrucialdufaitdelagrandetailledelaparabole.
IV.1.2. Choixdel'architectureantennaire
Parmilesdiffrentesfaonsdegnrerdelapolarisationcirculaire,l'utilisationdemodesdgnrs
desantennespatchestunesolutionfaibleencombrement.Eneffet,l'antenneestainsirenduetrs
compactegrceuneseulealimentation,maisaudtrimentd'unebandepassantetrslimiteet
doncinadaptenotrecahierdescharges[IV.1].
Lesrseauxd'antennesutilisantplusieurslments,gnralement4,alimentationdphaseet
rotationsquentielleontuntrsbonrapportdepolarisationcirculaire(PC)dansl'axesurunelarge
bandedefrquences,maispossdentunencombrementimportant.Deplus,d'importantsniveauxde
polarisation croise apparaissent +/ 45 [IV.2]. Les antennes imprimes alimentes par des
coupleurshybridessontunboncompromisentrelesdeuxmthodesprcdentesentermesdetaille,
derapportdePCdansl'axeetdelargeurdebande[IV.3].Cettesolutionpermetenoutredechoisir
lesensdelapolarisationmiseoureueenalimentantleportducoupleurhybrideappropri[IV.4].
L'approchemultifrquenced'antennesPCestasseznouvelleetn'avaitjamaisttudienotre
connaissance,pourdesbandesdefrquenceaussiloignesl'unedel'autre(rapportde4,7entreles
deux frquences de fonctionnement). Cependant, une antenne PC bibande a rcemment t
prsente[IV.5].Satailleestrduitemaissesbandespassantessontlimites1%causedela
techniqueutilisequiestcelledesmodesdgnrs.
Pourremplirlecahierdeschargesdeceprojet,nousavonsdoncslectionnuneantennepatchbi
bandebasesurunealimentationparcoupleurshybridesentechnologiemicroruban.
Le caractre bibande de l'antenne est obtenu en insrant un autre patch judicieusement
dimensionnfonctionnantenhautefrquencedansunpatchpluslarge,rsonantenbassefrquence.
Latailledel'antenneresteainsicompacte.
106
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Lesdeuxpatchssontimprimssurunmmesubstratayantunepermittivitrelative
r
=2,22etune
paisseurde1,5mm(FigureIV.1).Ilssontlectromagntiquementcouplsaucircuitd'alimentation
parl'intermdiairededeuxfentesgravesdansleplandemassedescoupleurshybrides.Unebonne
couverture des deux bandes de frquence est obtenue en alimentant ces fentes par un coupleur
hybride. Le circuit d'alimentation est ralis sur un substrat infrieur de mme constante
dilectrique,maisd'paisseur0,758mm.L'antennepourraainsitravaillersimultanmentdansles
bandesLetX.Latailleresterduitepuisquelescircuitsd'alimentationsontplacssousl'antenne.
IV.1.3. Conceptiondel'antenne
IV.1.3.1.Conceptionsparedesantennes
Pourdbutercettetude,nousavonstravaillsurdeuxantennesmonobandesdistinctes,conues
pour valider le concept d'alimentation par coupleur hybride aux frquences dsires. Toutes les
simulationsonttralisesl'aidedusolveurlectromagntiqueAgilentMomentum[IV.6].Les
figures2et4montrentquelesdeuxrsonateursbasseethautefrquencessontalimentsparla
mmetechniquequecelleutiliseen[IV.4].Uneantennepatchestimprimesurlepremiersubstrat
et alimente par deux fentes perpendiculaires entre elles, pratiques dans le plan de masse. Ces
fentessontcoupleslectromagntiquementaveclesdeuxsortiesd'uncoupleurhybrideimprim
sur le substrat infrieur. Les deux modes perpendiculaires du patch sont donc excits avec des
signaux dphass de 90, crant ainsi une onde rayonne polarise circulairement. Grce au
coupleurhybride,unrapportaxialdePCdequalitestconservsurunelargebande.Ilestjuste
limitparlanaturersonnantedel'antennemicroruban.
IV.1.3.2.AntenneenbandeL
Travaillantleplusbasenfrquence,cetteantennedtermineralatailleglobaledenotrecircuitfinal.
Lesfentesonttpositionnesprsdesbordsdupatchetlesstubsd'adaptationducoupleurbasse
frquenceonttinclinspourrduirelatailleducircuitd'alimentation(FigureIV.2).
107
Figure IV.1: Vue 3D de l'antenne
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
LeROSthoriqueestprsentsurlaFigureIV.3.PourunROSinfrieur2,nousobtenonsune
bandepassantede 23MHz,centresurlafrquence1,695GHz,cequicorrespond unebande
passantede1,3%.
IV.1.3.3.AntenneenbandeX
Suivantlemmeprincipe,nousavonsconuunlmentrayonnantdestinfonctionnerdansune
bande de frquence de 400 MHz entre 8 GHz et 8,4 GHz (Figure IV.4). Une attention toute
particulireatapportelaconceptionducoupleurhybridepourvitertoutcouplageindsirable
entresesdeuxbranchesdesortie.Lesstubsd'adaptationdevaientaussiavoirunetaillerduitepour
nepasvenirempitersurledeuximehybrideaprsassemblage.
108
Figure IV.3: ROS simul en fonction de la frquence pour l'antenne en bande L
Figure IV.2: Vue de dessus de l'antenne bande L avec les fentes et le coupleur hybride en
transparence
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
LaFigureIV.5prsenteleROSsimulenfonctiondelafrquencepourl'antenneenbandeX.Nous
obtenonsunROSinfrieur2entre 7,85GHzet8,4GHz,soitune bandede 550MHz,cequi
reprsenteunebandepassantede6,7%.
IV.1.4. Associationdesdeuxantennes
L'objectifestdoncd'assemblerlesdeuxantennes detellefaonquelesystmeHFsoittrspeu
influencparlesystmeBF:ilfautpourcelaassocierprcautionneusementlesdeuxantennessur
unmmesubstrat.Pourparvenircersultat,nousavonsinsrlepetitlment(hautefrquence)
danslegrand.Lesimulateurlectromagntiqueatutilispouroptimiserl'espacement"g"entre
lespatchsafind'viterdescouplageslectromagntiquestropimportants(FigureIV.6).Durantcette
opration,ladimensiondupatchencastratconserve,alorsquelesdimensionsdugrandpatch
onttrduitespourajusterlesfrquencesdersonance.
109
Figure IV.5: ROS simul en fonction de la frquence pour lantenne en bande X
Figure IV.4: Vue de dessus de l'antenne en bande X avec les fentes et le coupleur hybride en
transparence
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Pouruneaugmentationdel'espacement"g"de1,8mm3,8mm,onobservesurlafigure6une
rductionde4%delafrquencedetravaildugrandpatchsansaltrationdecelledupetit.Ceteffet
peuttreexpliquparl'influencedelafentecarrequisparelesdeuxantennes:lescourantsdu
grandpatchsonteneffetcontraintsdes'incurverautourdecettefenteafindepouvoirlacontourner
(FigureIV.7.a),cequiaugmentelalongueurmoyennedeleurtrajet.
Lorsquel'espace"g"s'accrot,lafentedevientdeplusenpluslargeetlalongueurdestrajetsdes
courants la surface augmenteencore naturellement, ce quia pour consquencede diminuerla
frquencedetravaildel'antenneenbandeL.
Danslastructureainsioptimise,lalongueurdugrandlmentatrduitede6%parrapportla
longueur du mme patch rayonnant seul (paragraphe 3.1.1). Les ctes finales de l'antenne sont
dtaillessurlesfiguresIV.7.betIV.8.
110
Figure IV.6: Influence du gap sur la frquence de rsonance du patch en basse frquence
Figure IV.7: (a) Cartographie des courants la surface de l'antenne en bande L (b)Vue 3D du
patch et de son circuit d'alimentation
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.1.5. Rsultats
IV.1.5.1.Adaptation
LessimulationsetmesuresduROS,sontprsentessurlesfiguresIV.9aetb.
111
Figure IV.8: Vue de dessus de l'antenne et de son circuit d'alimentation
Figure IV.9: ROS simul et mesur en fonction de la frquence en bande L(a) et en bande X (b)
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Ontrouveunbonaccordentrelesrsultatssimulsetexprimentaux,exceptuncartinfime(0,4%
enbassefrquenceet0,3%enhautefrquence)dauxtolrancesdefabrication.Labandepassante
mesurepourunROSinfrieur2estde1,5%(30MHz)1,7GHzetde8,64%(700MHz)8,1
GHz.Lecahierdeschargesestdoncsatisfaitconcernantlesspcificationspourlesdeuxbandesde
frquencesMtosat.
IV.1.5.2.Gainetrapportaxial
Lesrapportsdepolarisationdansl'axesontprsentssurlesfiguresIV.10aetb.Labandepassante
3dBestde3,8%(65MHz)pourlabandeLetde7,4%(600MHz)pourlabande X.Dansles
bandesdemandes,1,6981,709GHzet88,4GHz,lesrapportsdepolarisationcirculairesont
respectivementinfrieurs2dBet2,2dB.Lamesuredugainmaximumdansladirectionnormale
estaussiprsentesurcesfigures.Cesgainssonttoujourssuprieurs5dBisurlesdeuxbandes.
IV.1.5.3.Rayonnementetpolarisation
LesmesuresderayonnementenpolarisationcirculairedroitesontprsentessurlafigureIV.11.a
1,7GHzetsurlafigureIV.11.b8,2GHz.Cesmesuresonttralisesl'aidedelamthodede
la source tournante. Une rotation de 90 de l'antenne d'mission a lieu, simultanment avec la
rotationangulairepermettantlebalayageen . Unerotationde360delasourcesursonaxeest
obtenue pour environ 4 de balayage en . Les carts minimum et maximum forment une
ondulationquipermetd'estimerl'volutiondurapportaxialdePClorsdesvariationsangulaires.
Nous observons qu'il est trs bon puisque proche de 0dB de 20 65 1,7 GHz et qu'il est
fortementdgradvers+40etpourdesdirectionsprochesdel'horizon.Pourlafrquencebasse,
nousconstatonsunrapportdepolarisationcirculaireinfrieur2dBentrelesangles71< <24
avecuncartminimumde0,1dBdansl'axedel'antenne.Alafrquencehaute,largionangulaire
pourlaquellelerapportdepolarisationestinfrieur2dB,est45< <10avecunminimumde
0,9 dB. L'isolation mesure entre les deux antennes est suprieure 30 dB ce qui permet
lutilisationsimultanedesdeuxbandes.
112
Figure IV.10: Gain et rapport de polarisation circulaire dans l'axe en fonction de la frquence en
bande L (a) et en bande X (b)
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Figure IV.11: (a) Rayonnement en polarisation circulaire droite 1,7 GHz en fonction de (b)
Rayonnement en polarisation circulaire droite 8,2 GHz en fonction de
IV.1.5.4.Conclusions
LaconceptiondecetteantennebibanderespecteparfaitementlesspcificationsdeMtosatdans
lesbandesLetX.L'utilisationdecoupleurhybridesurlesubstratinfrieurapermisdecouvrir
assez largement les deux bandes. Cette solution possde aussi lavantage de rendre la structure
beaucoupmoinssensibleauxtolrancesdefabrication,cequinestpaslecasparexemplepourdes
antennesutilisantdessolutionsdetypemodesdgnrs.Lalimentation par fentes permetaussi
dviterlinsertiondeviasverticauxncessitantdessoudures.Demme,lalimentationparlignes
microrubandanslemmeplanqueleslmentsrayonnants,auraitticipluscomplexemettreen
uvreetnfastesurlaqualitdelapolarisationcirculaire.Lesperformancesmesuressontaussi
bonnesquecellesobtenuesavecdesantennesmonobandepolarisationcirculairealimentespar
uncoupleurhybride.L'encombrementfinal,leplandemasseexclu,estde5*8cm(10*13cmavec
leplandemasse).Lastructuredebasedecetteantenneagalementserviderfrenceauxtravaux
suivants.
IV.2. ANTENNEDOUBLEPOLARISATIONLINAIREAVEC
COMMUTATEURSPDTMEMS
L'objectiftaitderaliseruneantennedoublepolarisationlinairepourdesapplicationsWLAN.
NousavonschoisileMEMSmagntiquedelasocitMagfusion,djprsent,pourraliserla
commutation.L'antenneestcentresur5,8GHzcequicorrespondlalimitedefonctionnementdu
composantMEMS
113
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.2.1. Alimentationd'uneantennepatchparlignecoplanaire
IV.2.1.1.1.Conceptiondelapartierayonnante
Pour commuter entre la polarisation linaire verticale et horizontale, nous avons besoin d'une
antenne patch carr alimente par deux lignes orthogonales. Lors de la conception, nous avons
optimis l'isolation entre les deux ports au dtriment de la bande passante. En effet, c'tait une
condition sine qua non pour obtenir un niveau de polarisation croise lev. Comme nous
n'utiliseronsqu'unseulMEMSSPDT,lalignequineserapasalimenteseraencircuitouvert,et
doncsil'isolationentrelesdeuxportsn'estpasassure,ladeuximelignerayonnerademanire
parasiteetrduiraleniveaudepolarisationcroisefinal.
Deplus,commeleMEMSde MagfusionncessiteuneconnexiondetypeCPW,nousavonsd
dvelopper une alimentation par lignes coplanaires pour le patch. Nous avons choisi une
alimentation par courtcircuit (Figure IV.12). Cette solution permet de jouer sur la longueur des
fentesdecourtcircuitpourobtenirunebonneadaptationsurlesdeuxports.Nousavonsobserv
quecettesolutiongneraitunniveaudepolarisationcroiseinfrieurunealimentationparcircuit
ouvert.
(a) (b)
Figure IV.12: (a) Masque de l'antenne (b) Photographie de l'antenne ralise
L'antenneatralisesurunsubstratduroidd'paisseur1,524mmetdepermittivit
r
=2,2.Pour
laligneCPW,lesubstratestenalumined'paisseur0,635mmetdepermittivit
r
=9,8.Nousavons
choisipourlaligneunsubstratavecun
r
suprieurpourrduiresataille.
Nousavonsmesurlecomportementdel'antenneseule.Lasimulationetlesmesuresdel'adaptation
etdespertesd'insertionpourlesdeuxportsdel'antennesontprsentessurlafigureIV.13.a.La
bandepassante10dBestde170MHzcentresurlafrquencede5,8GHz(3%debande).On
observequel'isolationentrelesdeuxportsestsuprieure20dBsurtoutelabandeol'antenne
prsenteunevaleurdeS
11
infrieure10dB.Cersultatestconfirmparlamesuredudiagramme
de rayonnement de l'antenne (figure IV.13.b), on mesure dans l'axe un rapport de niveau de
polarisationcroisesuprieure30dB.Legainobtenudansl'axeestsuprieur5dBipourles
deuxportsd'alimentation.
114
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
(a)
(b)
Figure IV.13: (a) Adaptation et pertes d'insertion (b) Diagramme de rayonnement de l'antenne
avec un seul port aliment
L'antenne mesure correspond donc nos attentes, nous pouvons alors intgrer sur le mme
substratl'antenneetlecommutateurMEMS.
IV.2.1.2.3.InsertionducommutateurSPDTdeMagfusion
OnutiliselecommutateurSPDTMagfusioncommeunaiguilleurpouralimenterunportoul'autre
del'antenne.LemasquefinaldelastructureestprsentsurlafigureIV.14.a.tantdonnqueles
lignesdepropagationsontdetypeCPW(lignesenbleuclair),despontsairsontutilissauniveau
descoudes(ligneenbleufonc)pourliminerlesmodespairs.
(a)
(b)
Figure IV.14: (a) masque de l'antenne (b) photographie de l'antenne
LamesuredusystmecompletmontrequeleMEMSnemodifiequetrspeulecomportementde
l'antenne.GrcelatrsbonneisolationentrelesdeuxportsduMEMS(suprieure30dB),on
conserveunepolarisationcroisesuprieure30dBpourlesdeuxcommutations.Legain,unpeu
plusfaible,estdel'ordrede3,9dBi(FigureIV.15).
115
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
(a) (b)
Figure IV.15: (a) S11 et (b) diagramme de rayonnement de l'antenne pour les deux commutations
IV.2.1.3.Conclusion
Cetteantenneactiveprsentedetrsbonnescaractristiques5,8GHz.LeMEMSauntempsde
commutationde50s.Uneperspectived'volutionpouruntelsystmepourraittrel'ajoutd'un
hybrideenentredel'antennecommevuprcdemment.EnutilisantleMEMSSPDTpourchoisir
un des deux ports de l'hybride, il serait possible de commuter entre une polarisation circulaire
gaucheoudroite.
IV.3. HYBRIDESEMIDISCRETRECONFIGURABLE
IV.3.1. Coupleursemidiscretsimple
Fuscoet.al.ontdmontr[IV.7]qu'uncoupleurhybride3dBpouvaittresynthtisenutilisant
descomposantsdiscretslaplacedestraditionnellesbranchesverticalesd'uncoupleurtraditionnel
quiontunelongueurde
g
/4.(FigureIV.16).Nousproposonsd'utiliserdescomposantsactifsla
placedescapacitsfixespourmodifierdynamiquementlecomportementducoupleur.
116
Figure IV.16: Schma du coupleur hybride semi-discret
Port 1
Port 4
Port 2
Port 3
l
1
Y
2
Z
1
Z
1
l
1
Y
2
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.3.1.1.Thorieetconception
IV.3.1.1.1.Casgnral
L'tudedececoupleurestraliseensuivantlatechniqued'analysedesystmes4portsquiat
proposeen1956parJ.ReedetJ.Wheeler[IV.8].Onconsidreraquelesligneshorizontalesont
unelongueurl
1
etuneimpdancecaractristiqueZ
1
.LesdeuxadmittancesY
2
reliantcesdeuxlignes
serontidentiques.
Lecircuitestdcomposenmodespair(FigureIV.17.a)etimpair(FigureIV.17.b).
(a) (b)
Figure IV.17: Analyse en mode pair (a) et en mode impair (b)
Pourlemodepair,lemodleestformepardeuxlignesdetransmissionuniformesetsanspertes
d'impdancecaractristiqueZ
1
etdelongueurl
1
.Lamatriced'excitationestdonneparlarelation
(IV.1).
[
cosl
1
jZ
1
sin l
1
jY
1
sin l
1
cos l
1
]
(IV.1)
Lemodeimpairestcaractrispardeuxlignessriecourtcircuiteslamassel'entre,etla
sortie par des admittances discrtes. On obtient la matrice d'excitation impaire en ralisant le
produitmatricielentre unepremireadmittanceY
2
courtcircuite,lalignedetransmissionetla
deuximeadmittancecourtcircuiteY
2
(IV.2).
[
1 0
2Y
2
1
] [
cos l
1
jZ
1
sin l
1
jY
1
sin l
1
cos l
1
][
1 0
2Y
2
1
]
(IV.2)
Cequidonne(IV.3):
[
cosl
1
+2jY
2
Z
1
sin l
1
jZ
1
sin l
1
4Y
2
cos l
1
+ jsinl
1
(Y
1
+4Y
2
Z
1
) cos l
1
+2j Y
2
Z
1
sin l
1
]
(IV.3)
Lesconditionspouruneadaptation,uneisolationetuncouplageparfaitsontdduitesdelamthode
suggreparReedetWheeler(IV.4).
Pour
[
A B
C D
]
ilfaut: A+BCD=0 (IV.4)
117
Port 1
Port 4
Port 2
Port 3
l
1
2Y
2
Z
1
2Y
2
2Y
2
2Y
2
Z
1
l
1
Port 1
Port 4
Port 2
Port 3
l
1
2Y
2
Z
1
2Y
2
2Y
2
2Y
2
Z
1
l
1
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Pour la matrice paire, cette condition est ralise si Z
1
=Y
1
=1 donc il faut que l'impdance
caractristiqueZ
c
delalignesoitgalel'impdancedelachargedesdiffrentsports.
Z
c
=Z
1
(IV.5)
Sions'intresselamatriceimpaire,ontrouvelarelation(IV.6).
Y
2
+ j tan (l
1
)Y
2
Z
1
=0
(IV.6)
Deplusenpremireapproximation,onpeuttrouverdemanireempiriquelarelation(IV.7),ok
estlerapportdecouplageenpuissanceentrelesports2et3.
k=
Y
1
Y
2
(IV.7)
L'quation(IV.6)montrequel'isolationparfaitepeuttreobtenuepourtroisvaleursdel'admittance
Y
2
:nulle,unevaleurinductiveetunevaleurcapacitive.
DanslecasparticulieroY
2
estnulle,larelationIV.6 estvraiequellequesoitlalongueurdela
ligne. Le couplage k est alors nul lui aussi, on est dans le cas de deux lignes de transmission
compltementdcouples.
Sil'onmetdectcecasparticulier,aveclesquations(IV.6)et(IV.7)nouspouvonsdduirela
longueurdelalignel
1
enfonctionducouplageksouhait,dansplusieurscas.
Si l'admittance est une capacit Y
2
=jC. Le couplage dpendra du rapport entre l'admittance
caractristiquedelaligneY
1
etC .Danscecas,onpeutdduirepourlalongueurdelalignela
relation(IV.8)o estlenombred'onde(2 / ).
l
1
=
arctan(.
k)
(IV.8)
SimaintenantonseplacedanslecasolesadmittancessontremplacesdansdeuxselfsZ
2
=jL ,
lecouplagekvadpendredurapportentreL etl'impdancedelalignecaractristique.Onaalors
larelation(IV.9):
l
1
=
arctan(.k )
(IV.9)
Pourlesdeuxcas,quelquesoitlecouplagesouhait,ilexisteunelongueurdelignequipermettrade
remplirlesconditionssimultanesd'uneisolationetd'uneadaptationparfaite.
IV.3.1.1.2.Casdel'hybride3dB
Onseplacedoncdanslecasd'uncouplage3dB,savoirk=1.
Pouruneadmittancedetypecapacitive,ontrouveunelongueurlectriquede45pourlaligneetla
valeurdelacapacitestdonneparlarelation(IV.10):
118
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
C
3dB
=
1
2n f Z
1
(IV.10)
Sil'admittanceestremplaceparuneself,lalongueurlectriquedelalignedonneparlarelation
(IV.9)estde135etlavaleurdelaselfestdonneparlarelation(IV.11).
L
3dB
=2n f Z
1
(IV.11)
Dans le cas particulier d'un couplage 3dB et d'une admittance capacitive, on peut simplifier les
diffrentesmatricesvuesprcdemmentpournegarderquelavariableY
2
.Lalongueurlectrique
delaligneestdoncde45etk=1.Pourlamatricepaire,ona(IV.12):
[
.2
2
j
.2
2
j
.2
2
.2
2
]
(IV.12)
Etpourlamatriceimpaire,lamatricesimplifieest(IV.13):
[
.2
2
+.2Y
2
+ j
.2
2
2.2Y
2
+ j
.2
2
(1+4Y
2
)
.2
2
+.2Y
2
]
(IV.13)
Toujours en suivant la mthode de Reed et Whealer, on en dduit par chaque matrice les
coefficientsdestensionsdetransmissionT
++
etT
+
,etlescoefficientsdestensionsderflexion
++
et
+.
Onpeutainsiendduirelesvecteursd'amplitudesurles4ports:A
11
etA
41
(IV.14),A
21
(IV.15)etA
31
(IV.16).
A
11
=A
41
=
Y
2
j Y
2
1+2Y
2
+ j (1+2Y
2
+2Y
2
)
(IV.14)
A
21
=
2.2(1+Y
2
)+2j .2(1+Y
2
+Y
2
)
4Y
2
+4j (1+2Y
2
+Y
2
)
(IV.15)
A
31
=
2.2Y
2
2j.2(Y
2
+Y
2
)
4Y
2
+4j (1+2Y
2
+Y
2
)
(IV.16)
Aufinal,onpeutaismentcalculer:
siY=0,iln'yapasdecapacitentrelesdeuxlignes,A
11
=A
41
=A
31
=0et A
21
=
.2
2
j
.2
2
,donc
toutel'nergieesttransmiseauport2avecundphasagede45.
119
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
MaintenantsiY=j,A
11
=A
41
=0, A
21
=
.2
2
et A
31
= j
.2
2
,lesignalserepartitquitablement
entrelesports2et3avecundphasageentrecesdeuxportsde90.
Sioncalculelerapportdecouplagekentreleport2etleport3,ontrouvelarelation(IV.17).
k==
A
21
A
31
=
1+Y
2
+ j ( 1+Y
2
+Y
2
)
Y
2
(1+j (1+Y
2
))
(IV.17)
IV.3.1.2.Ralisationetmesures
Nousallonsmaintenantvrifiernosdiffrenteshypothsesenralisant,dansunpremiertempsune
tude passive de la structure avec des capacits fixes, puis en remplaant les capacits par des
diodesvaractorpouranalyserlastructureactive.
IV.3.1.2.1.Coupleurpassif
NousavonseffectuunpremireconceptionsousADSenmodecircuit(FigureIV.18.a),puisnous
avons optimis la structure sous Momentum. Pour faire les simulations sous Momentum, nous
avonsdansunpremiertempssimullastructurepassiveavecles4portsducoupleur,plusdeux
portsparcapacitquireprsententlesdeuxextrmitsdecontactducomposant(FigureIV.18.b).
OnsimuleensuitesousADSledataset8ports,enconnectantauxportsconcernslescapacits
(figureIV.19.a).
(a) (b)
Figure IV.18: (a) conception sous ADS (b) conception sous MOMENTUM
Pourunefrquencede5,8GHzetuneimpdancecaractristiqueZ
1
=50,lacapacitC
hyb
dduite
de l'quation (IV.10) est de 0,515 pF. Pour confirmer ces rsultats de simulation, un premier
prototype a t conu et ralis en technologie microstrip (Substrat Duroid d'paisseur 0,13mm,
r
=2,22).
120
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
OnutilisedescapacitsfixesAccuPthinFilmtechnologychipsayantunevaleurde0,5pFdela
compagnieAVX[IV.9].Unephotographieducoupleuraveclescapacitsestprsentesurlafigure
IV.19.b.
Les simulations et mesures des paramtres S avec et sans les capacits sont prsentes sur les
figuresIV.19.aetb.Aveclescapacits,lastructureabienuncomportementdecoupleurhybride.A
5,6GHz,lesignalestdivisdemaniregaleentreleportdirect2etleportcoupl3.L'adaptation
etl'isolationmesureestinfrieure20dB.Ondfiniralabandepassantehybride1dBcomme
tantlabandedefrquenceoladiffrencedepuissanceentrelesports2et3estinfrieure1dB.
Ici,cettebandepassanteestmesure8%centrsur5,6GHz.
Pourlecircuitsanscapacits,onobservebienuncomportementdelignesdcouples.L'adaptation
estinfrieure20dBetlecouplagesurlesports3et4estquantluiinfrieur30dB.Les
pertesd'insertionsurleport2sontde0,25dB5,6GHz.
(a)
(b)
Figure IV.20: Paramtres Sij pour le coupleur avec capacits (a) et sans capacits(b)
121
(a) (b)
Figure IV.19: (a) Synoptique sous ADS du coupleur avec les capacits (b) Photographie du
coupleur semi-discret avec des capacits
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.3.1.2.2.Coupleuractif
Pourlaralisationd'uncoupleuractifcommandablelctroniquement,nousavonsfaitappeldes
varactors jonction hyperabrupte qui peuvent modifier leur capacit d'un rapport de 10. Les
composants industriels disponibles ont une capacit minimale de 0,15 pF, ce qui donne une
dynamique de variation comprise entre 0,15pF et 1,5pF. Pour utiliser toute la dynamique de ce
composant,nousavonsdciddenousrecentrersurunefrquenceunpeuplusbassede3,5GHz.
Pourunefrquencede3,5GHzetuneimpdancecaractristiqueZ
1
=50,lacapacitC
3dB
dduite
del'quation(IV.10)estde0,909pF.Lesdiodesvaractorsslectionnesontuneplagedevariation
de0,15pF 1,4pF [IV.10]. Une photographieduprototypefabriqu est prsentesur la figure
IV.21.a.
Cecircuitatmesur3.5GHzpourdiffrentestensionsinversesVrvariantentre0Vet15V.On
peut voir sur la figure IV.21.b que pour une valeur de capacit infrieure 0,2pF (Vr>11V), le
circuitsecomportecommedeuxlignesdetransmissiondcouples.Pourunecapacitde0,92pF
(Vr=0,96V),lesystmefonctionnecommeuncoupleur3dB.Deplus,enjouantsurlavaleurdela
capacitentre0,5et3V,ilestpossibledechangerlerapportdedivisionentrelesports2et3touten
conservantdessignauxen quadrature.Avecunetensioninverse variantentre0,6Vet15V, ilest
possibledereconfigurerlecouplagekentrelesports2et3,entre0,3et55.
(a)
(b)
Figure IV.21: (a) Photographie du coupleur (b) Paramtres Sij en fonction de la capacit
SurlafigureIV.22.a,nousprsentonslasimulationetlamesuredesparamtresS
ij
enfonctiondela
frquence pour le mode hybride (Vr=0,96V). Les simulations et les mesures sont en trs bonne
adquation. Le signal d'alimentation est divis quitablement entre les ports 2 et 3 3,5 GHz.
L'adaptationduport1etl'isolationentreleport4et1sonttouteslesdeuxinfrieures25dB.
Ontrouveunebandepassanteducoupleur1dBde9%autourde3,5GHz.Danslemodelignes
dcouples(Vr=15V),unebonneisolationestobtenueentrelesports13et14(FigureIV.22.b).
Les pertes dinsertion entre les ports 12 sont de 0,45dB 3,5 GHz, montrent une bonne
adaptation.
122
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
(a)
(b)
Figure IV.22: Paramtres S
ij
pour une tension de 0,96V (a) et pour une tension de 15V (b)
Onobservesurtoutqu'ilestpossiblededplacerlafrquencedefonctionnementducoupleursur
une bande assez large. Sur la figure IV.23, les paramtres S en fonction de la frquence sont
prsentspourtroisvaleursdecapacitsdiffrentes:1,4pF,0,88pFet0,44pF.
Ilestdoncpossibledereconfigurerlafrquence,olecoupleursecomportecommeunhybride,
entre2,5GHzet5,3GHztoutenconservantuneisolationetuneadaptationinfrieure10dB.
Unecouverturedebandede108%estatteinte.
Lathorieestdoncbienvrifieetcecoupleurprsentedescaractristiquesreconfigurablestrs
intressantesouvrantdesapplicationsoriginales.
123
Figure IV.23: Simulation des paramtres S pour 3 valeurs de capacits diffrentes
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.3.2. Doublehybridequasidiscret
IV.3.2.1.Thorie
La mise en cascade de plusieurs coupleurs hybrides a dj t thorise. Elle peut notamment
permettred'largirlabandedefrquencedefonctionnementd'unfacteurdeux[IV.11].
On amliore ainsi les performances d'un hybride quasidiscret seul. Nous avons vit ici une
nouvellersolutionparlamthodedeReedetWheelerquidonneraitdesmatricestropcomplexes.
Sikestlecouplageentreleportdirectetleportcoupl,pouruneexcitationparunvecteurtension
unitaire,onpeutdfinirjcommelevecteurdelatensionreuesurleportdirect,
.1o 20
tant le vecteur tension reue sur le port coupl. Le rapport entre k et est dfini par (IV.18).
o=
.
k
1+k
(IV.18)
Onpeutdoncpartird'uneanalysedesvecteurstension(FigureIV.25),dduirelecouplagetotalk
2
delastructure(IV.19).Aveclarelation(IV.18),onpeutexprimerk
2
enfonctiondek.
Si les deux coupleurs ont un comportement purement hybride 3 dB, on a donc k=1, d'o partir de
(IV.19), on obtient k
2
=0. Ainsi toute l'nergie est transmise directement au port 3 ce qui est cohrent
124
Figure IV.24: Schma de principe du double coupleur hybride
Figure IV.25: Analyse en vecteur tension sur le coupleur double hybride
Port d'entre
1
4
2
3
k, 90
Coupleur
a
1
=120 -
a
2
=o290 -
a
3
=
.
(1o)20
Port isol
Port direct
Port coupl
1
4
k, 90
2
3
Coupleur
b
2
=o 2180+(1o )20
-
b
3
=2o
.
(1o )290 -
-
Port 1
Port 4
Port 2
Port 3
l
1
C C C C
Z
0
l
1
Z
0
l
1
Z
0
l
1
Z
0
l
2
Z
0
l
2
Z
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
avec l'tat de l'art puisque ce type de structure, o deux hybrides 3 dB sont cascads, est couramment
utilise pour permettre le croisement de deux signaux.
.
k
2
==
b
2
b
3
=
12o
2j o
.
(1o)
=
1k
2j .k
(IV.19)
IV.3.2.2.Thorieducoupleurdouble3dB
Pour obtenir un fonctionnement hybride 3dB, il faut un couplage =j ou =-j. A partir de l'quation
(IV.19), on peut calculer pour chacun des deux coupleurs individuellement, le couplage ncessaire.
On considre que k est positif (ce qui est cohrent avec les rsultats prcdents)
Si
.
k
2
=j ilfaut k=
62 .8
2
0,17 (IV.20)
Si
.
k
2
= j ilfaut k=
6+2 .8
2
5,8 (IV.21)
Nous avons vu au paragraphe IV.3.1.2.2 que le coupleur semi-discret peut avoir une amplitude de
couplage entre 0,3 et 55. Donc
.
k
2
=j n'est pas possible, en revanche, on peut largement
obtenir un couplage de 5,8 il sera donc possible d'avoir S
21
=jS
31
.
Pour connatre l'admittance ncessaire pour un tel couplage, il suffit d'utiliser la relation (IV.7).
Comme Y
1
est toujours gale 1, on trouve l'quation (IV.22).
Y
2
=
.
(
1
k
)=
.
2
6+2.8
=.21 (IV.22)
Dans le cas d'une admittance de type capacitive, on trouve la relation (IV.24).
C
3dB
=
.21
2n f Z
1
(IV.23)
Il nous reste maintenant calculer la longueur de ligne l
1
qui permettra pour ce couplage une
adaptationetuneisolationparfaites.Lalongueurdelignevasimplementcorrespondrelorsqu'elle
serafixe,unefrquencepourlaquellelesystmeaurauncomportementidal.
Dansunpremiertemps,leplussimpleestd'avoirunecomportementidalpourchaquecoupleur,
ainsilorsqu'ilsserontcascads,lesystmeconserverauneadaptationetuneisolationparfaite.A
partirdel'quation(IV.8),ondduitqu'ilfautquel
1
=67,46.
Ilexistecependantunedeuximelongueurdelignepourlaquellelecoupleuraurauncomportement
idal.Pourobserverceteffet,nousallonsraliseruntudeenvecteurtensionsurleportd'entreet
leportisolducoupleur(FigureIV.26).Onappelleralecoefficientderflexiondel'hybrideet
lecoefficientdetransmissionsurleportisol.Commeilexisteuncoefficientderflexion,ona
besoindedfinirlecoefficientdetransmissionsurleportdirect etlecoefficientdetransmission
125
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
sur le port coupl . Lorsque le couplage n'est pas de 1, nous observons qu'un dphasage, par
rapportaucoefficientderflexion,apparatsurlecoefficientdetransmissionsurleportdirectet
surleportcoupl,onappelleracedphasage .Deplus,commelesdeuxcoupleursnesontpas
collsl'unl'autre,ilfautaussitenircomptedelalongueurdeligneentrecesdeuxcoupleursqui
ajouteraundphasagede .
Lasommevectorielledesdiffrentsvecteurspourleportd'entreetleportisolestalorsralise
graphiquement. On prendra pour la reprsentation une valeur de et de correspondant au
couplagek
2
=j,donck=5,8,donc=0,92 et =0.373.
Pourleportd'entre,nousavonsdonclasommede4vecteurs u
1
, u
2
, u
3
, u
4
(IV.24)
u
1
=1180 u
2
=0,85720+2(0+)
u
3
=0,373290+2(0+) u
4
=0,142180+2(0+)
(IV.24)
Etdemmepourleportisol,olevecteurtensionestlasommeentre4vecteurs v
1
, v
2
, v
3
, v
4
(IV.25)
v
1
=10 v
2
=0,8572180+2(0+)
v
3
=0,373290+2(0+) v
4
=0,1420+2( 0+)
(IV.25)
126
Figure IV.26: Analyse en vecteur tension de l'adaptation et de l'isolation de structure
1
4
2
3
k, 90
Coupleur
Port d'entre
a
1
=10 -
a
2
=o90+0-
a
3
=0 +0-
Port isol
Port direct
Port coupl
1
4
k, 90
2
3
Coupleur
c
2
=Io90+0+2
+I 0+0+2
-
c
3
=Io90+0+2
+I 180+0+2
-
c
1
=I180+Io 0+20+2
+I 2o 90+20+2
I 180+20+2
-
c
4
=I0+I o 180+20+2
+I 2o90+20+2
I 0+20+2
-
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Pourunangle2( + )adquat,lesdiffrentsvecteurstensionssurlesdeuxportss'annulent,cequi
corresponduncomportementhybrideidal.La valeurdel'angle2( + )peutdonctreajuste
grceladistanceentrelesdeuxhybrides.Demaniregraphique,onpeuttrouverqueladistance
lectriquedeslignespourlaquelleS
11
=S
41
=0estde2( + )=30.
Dansunpremiertemps,onpeutseplacerdanslecaso =0doncsilesdeuxhybridesontcolls.
Onadonc =15.Apartirdesquationsdel'hybride,onpeuttrouverquelalongueurlectriquede
lalignel
1
quicorrespond =15,estde28.
Pourraliserdeuxhybridescolls,ilfaututiliserunecapacitcentraled'unevaleurdoubledesdeux
autrescommedcritsurlafigureIV.28.
Siunetellesolutionsembletreattiranted'unpointdevuedelacompacit, ellenepourratre
utilisequedanslecaspassif.Dansnotrecas,ilestimpossibledetrouverdeuxvaractorsavecun
rapportdecapacitde2etquiconserventcerapportquelquesoitlatension.
Onutiliseradonc4varactorsdemmevaleuretlescoupleursnepourrontpastrejuxtaposs.
Donc ne sera pas gal 0. Comme une ligne de transmission classique ajoute un dphasage
ngatif,laligneauratendancecompenserledphasageimposparlecoupleuretilaugmenterala
longueurlectriquedelignepourlaquellelecomportementdel'hybrideestidal.
127
Figure IV.28: Double hybride coll
Port 1
Port 4
Port 2
Port 3
l
1
C 2C C
Z
0
l
1
Z
0
l
1
Z
0
l
1
Z
0
Figure IV.27: Sommes des vecteurs de tension pour le port d'entre (a) et le port isol (b)
port isol
2(+)
2(+)
port d'entre
u
1
u
2
u
3
u
4
v
2
v
1
v
3 v
4
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Nous avons donc prouv que pour un double coupleur hybride semidiscret, deux longueurs
lectriquesdelignepermettentuncomportementidaldel'hybride.Ilestnoterqu'entrecesdeux
longueurslectrique,l'adaptationetl'isolationseronttoujourstrsbonnescarmmesilesvecteurs
nes'annulentpas,ilsauronttoujourstendancesecompenser(IV.28).
IV.3.2.3.Prototypeetmesure
Pourvrifierceshypothses,unprototypeatralissurunsubstratduroiddepermittivit
r
=2,2
etd'paisseur0,135mm.Nousavonschoisipourlabandehauteunefrquencede5,2GHzetpourla
bandebasse2,4GHz.UnephotographieducircuitestproposefigureIV.29.
Les mesures et simulations des paramtres S pour les deux frquences de fonctionnement sont
prsentessurlafigureIV.30.
(a)
(b)
Figure IV.30: Paramtres S pour la frquence d'adaptation basse (a) et pour la frquence
d'adaptation haute (b)
Pourlesdeuxfrquencesdefonctionnement,uncomportementhybride3dBestbienobtenu.Pour
la frquence de 2,4 GHz, la bande passante en mode hybride 1 dB est mesure 19%. Pour la
frquencede5,2GHz,cettebandepassanteestde12%.Labandebasseestdoubleparrapportun
128
Figure IV.29: Photographie du prototype de double coupleur reconfigurable
10mm
7mm
Diodes varactors
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
coupleur quasidiscret seul. Pour la bande haute, elle est largie dans une mesure moindre mais
l'isolationetl'adaptationsontmeilleures.
Si maintenant, on s'intresse au fonctionnement pour une frquence fixe. Par exemple le
comportement 3,5 GHz en fonction de la frquence est prsent sur la figure IV.31. Pour les
capacits faibles (<0,2 pF)le coupleur fonctionne nouveau enmodede lignesdcouples. On
observeuneisolationmoindreentrelesports2et3carlerapportcapacitifentrelesdeuxlignesest
deuxfoissuprieur(4varactorsaulieude2prcdemment).Pourunecapacitde0,385pF,on
obtient bien un comportement hybride 3 dB. Ce qui est cohrent avec l'quation (IV.24) o on
trouveunecapacitthoriquede0,376pF.
Pour une capacit entre 0,9 pf et 1 pF, un nouveau mode apparat, on l'appellera mode de
croisement puisque la majeure partie de l'nergie est transmise sur le port coupl. Le couplage
atteintalorsauminimumlavaleurde25dB.
IV.3.2.4.Conclusion
Nous avons montr l'intrt de mettre en srie deux coupleurs quasidiscrets pour amliorer le
comportement total de la structure. De plus le systme reste toujours aussi simple polariser
puisqueleslignessonttoujoursdconnecteslectriquement.
Cequenousavonsfaitavecdeuxcoupleurspourraittrefaitavec4coupleursetlescaractristiques
seraientencoreamliores.
IV.4. ANTENNEDIVERSITDEPOLARISATION
Notreobjectifesticidemettreprofitlesrsultatsobtenusaveclecoupleurreconfigurablequasi
discret pour concevoir une antenne reconfigurable en polarisation. Toujours suivant la mme
mthodologie, nousavonsdansunpremiertempsconulesystmedemanirepassiveavecdes
capacitsfixes,puisnousavonsremplacleslmentspassifspardesvaractorspourobtenirune
antenneactive.Dansunpremiertemps,nousallonsnousintresserlastructurerayonnante.
129
Figure IV.31: Paramtre Sij en fonction de la valeur de la capacit
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.4.1. Introduction
Nousnoussommesintressslapossibilitdecommuteruneantenneentreunfonctionnement
linaire et circulaire. Cette fonction a dj t propose dans la littrature [II.8284] mais les
solutionsproposessontengnraleassezdifficilesmettreenoeuvrecarellessontbasessurdes
commutationsdediodesPINpositionnessurl'antenne.L'interactionentreladiodePINetl'antenne
est extrmement difficile modliser et de plus, elle conduit souvent la dgradation des
performancesdel'antenne.Unesolutionatproposeen2007parWuetal.[IV.12]pourraliser
cettefonction.L'ideestd'utiliserdesdiodesPINpourcommuterlesignalsoitdirectementvers
l'antenne, soit sur un coupleur hybride qui est connect deux fentes et permet ainsi un
rayonnementenpolarisationcirculaire(FigureIV.32.a).Laconfigurationestlammequecelleque
nousavonsdcriteauparagrapheIV.1.2avecl'antennesurlesubstratsuprieur,leplandemasse
aveclesfentesgravessurlesubstratinfrieur.Cettesolutionapouravantagedesparerlesdiodes
PIN de la partie rayonnante par le plan de masse. La mesure donne alors un gain de 5 dB en
polarisationlinaireetunrapportaxialinfrieur3dBsuruneouvertureangulairede7565
(FigureIV.32.b).
Nousallonsmontrercommentnotresolutionpermetd'obtenirdesperformancesidentiquesdansun
encombrementplusrduit.
(a)
(b)
Figure IV.32: (a) Antenne reconfigurable propose dans [9] et (b) mesure du diagramme de
rayonnement en polarisation circulaire
IV.4.2. Principedefonctionnement
Nous allons utiliser notre coupleur reconfigurable pour alimenter une antenne patch par
l'intermdiairedefentesgravesdanssonplandemasse.LafigureIV.33montrelatopologiedela
130
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
structure.Enutilisantlecoupleurdanslemodelignesdcouples,lepatchseraexcitdemanire
rayonner une onde polarise linairement. De plus, en choisissant le port du coupleur qui sera
aliment(port1ou 2)parl'intermdiaired'unSPDT(SinglePoleDualThrow),unepolarisation
linaire horizontale ou verticale peut tre gnre. Si maintenant, le coupleur est dans le mode
coupleur hybride 3 dB, les deux fentes du patch seront excites avec un dphasage de 90 et
l'antennerayonneraunepolarisationcirculaire.ToujoursenutilisantuneSPDTentreleport1et2,
unepolarisationcirculairegaucheoudroitepeuttrechoisie.
IV.4.3. Conceptiondel'lmentrayonnant
L'lmentrayonnantestlencoreunpatchalimentparfentescoupleslctromagntiquement
une ligne microruban. Nous avons utilis un substrat suprieur d'une paisseur 0,762mm et un
substratinfrieurd'paisseur0,130mm.Pourlesdeuxsubstrats,lapermittivit
r
estde2,22(Figure
IV.34.a).LemasqueestprsentsurlafigureIV.34.b.
L'isolationentrelesportsatoptimiseaudtrimentdelabandepassantequin'estpaslecritre
primordialici.
(a)
(b)
Figure IV.34: (a) Vue 3D de l'antenne (b) Masque de l'antenne
131
Figure IV.33: Topologie de l'antenne reconfigurable en polarisation
Port 1
Port 2
Antenne double
polarisation
orthogonale
Coupleur
reconfigurable
Tension
inverse des
diodes
varactors
x
y
0.130 mm
0.762 mm
r=2.2
r=2.2
Ligne d'alimentation
microstrip
Fentes orthogonales
Patch carr
z
y
x
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
L'adaptationetlespertesd'insertionentreleport1etleport2sontprsentessurlafigureIV.35.
La bande passante est centre sur 5,8 GHz et une bande de 2,7% (156MHz) est obtenue. Le
couplagemutuelentrelesdeuxportsestinfrieur20dB5,8GHz.Ungainde5,21dBiat
mesur5,85GHz.Legainn'estpasaussilevquecequel'onpeuttrouverdanslalittraturemais
celaestdlafinessedeslignesdetransmissionutilisespouralimenterl'antenne.
IV.4.4. Antenne reconfigurable par composants discrets
Ladeuximetapeconsisteassociersurlemmecircuitl'antenneaveclecoupleurpassifconu.
Lecoupleurestplacdetellefaonavoirexactementlammelongueurlectriqueentrechaque
sortieducoupleuretlafented'excitation(FigureIV.36).
132
Figure IV.35: S
11
et S
21
de l'antenne
Figure IV. 36: Masque de l'antenne reconfigurable en polarisation
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
L'adaptationpourlesports1et2,etlespertesd'insertionentreleport1et2sontprsentespourla
structure avec les capacits sur la figure IV.37.a. C'est le S
21
qui limite la bande passante de
l'antennepuisquelecircuitsecomportecommepourunhybrideenmodereflexion.Celleciestde
2,5%(146MHz)cequinousmontrequelabandepassanten'estpaslimiteparlecoupleurmais
parl'antenne.Lesmmes rsultatssontprsentssurlafigureIV.37.bpourlastructuresansles
capacits,doncdanslecasolecoupleurestdanslemodelignesdcouples.Labandepassante
mesureestde2,5%etunebonnecorrespondanceesttrouveentrelessimulationsetlesmesures.
Lesrsultatssonttrsprochesdeceux observssurlafigureIV.35,cequinousmontrequeles
coupleurssanscapacitsecomportentbiencommedeuxlignesdetransmissiondcouples.
(a)
(b)
Figure IV.37: S
11
et S
21
pour l'antenne sans les capacit (a) et avec (b)
Lerapportaxialdel'antenneestprsentsurlafigureIV.38.apourlemodepolarisationcirculaire
etIV.38.bpourlemodepolarisationlinaire.Pourl'antenneaveclescapacits,labandepassante
3dBdurapportaxialestde3,3%(198MHz).Sanslescapacits,leniveaudepolarisationcroise
est suprieur 20 dB quelque soit la frquence. Le gain maximum est aussi prsent par cette
figure.Celuiciesttoujourslimitparlafinessedeslignesd'alimentation.Lavaleurmesureestde
5,05dB5,85GHz.
(a)
(b)
Figure IV. 38: Rapport axial et gain pour l'antenne sans capacit (a) et avec (b)
Lediagrammederayonnementdansleplanxzpourlemodepolarisationcirculaireestprsentsur
lafigureIV.39.apourlastructureaveclescapacits.Lerapportaxialestinfrieur3dBsurune
133
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
dynamiqueangulairede78< <58autourduznith.Lediagrammederayonnementpourles
polarisationsprincipalesetcroisessanslescapacitsestprsentsurlafigureIV.39.b.Lesniveaux
sontsuprieurs13dBquelquesoitl'angleavecunevaleurde17dBpour=0
(a)
(b)
Figure IV.39: Mesure dans le plan x-z du Rapport axial pour l'antenne avec capacit (a) et niveau
de polarisation croise pour l'antenne sans capacit
IV.4.5. Antenne reconfigurable en polarisation avec diodes varactor
Les varactors sont intgres la structure pour la rendre active dans une gamme de frquence
autourde3,5GHz.NousavonsvuauchapitreIV.3.1.2.2quelecoupleuractifsecomportecomme
unhybride3dBclassiquepourunetensioninverseVr=0,96V.Pourunetensionde15V,l'isolation
surleport3estsuprieure20dB3,5GHz.Nousavonsassocilecoupleuravecuneantenne
3,5GHz.LemasqueavecsesdimensionsestprsentsurlafigureIV.23.
Ladaptationetlespertesdinsertionpourlastructuredanslemodehybride3dB(Vr=0,96V)sont
prsentesdanslafigureIV.40.a.Lalargeurdelabandedadaptationestde2,8%autourde3,5
GHz(98MHzpourunebande10dB).Elleestlimitepar leS
21
.Lesmmesrsultatsdansle
modelignesdcouples(Vr=15V)sontexposssurlafigureIV.40.b.Pourcemode,lalargeurdela
bandedadaptationestalorslimiteparleS
11
.Elle estde3%autourde3,5GHz(106MHz).Une
bonnecorrlationesttrouveentrelessimulationsetlesmesuresdesS
11
etS
21
.
(a)
(b)
Figure IV.40: Adaptation et pertes de l'antenne pour une tension de 0,96V (a) et 15V (b)
134
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
LesrsultatsexposssurlafigureIV.41.amontrentunfonctionnementenPC(Vr=0,96V)avecun
rapportaxialcorrectsurunebandede3,8%(134MHz).Avecunetensioninversede15V,leniveau
depolarisationcroiseestsuprieur20dBsurcettemmebande.
Lamesuredudiagrammederayonnementenpolarisationcirculairedansleplanxzestprsente
danslafigureIV.41.bpourlemodehybride3dB(Vr=0,96V).Unrapportaxialinfrieur3dBest
obtenusurtoutledemiplancentrautourduznith.
Enfinunniveaudepolarisationcroisesuprieur20dBestmesursurlafigureIV.42.
135
(a) (b)
Figure IV.41: (a) Rapport axial pour V=0,96V et niveau de polarisation croise pour V=15V (b)
Diagramme de rayonnement de l'antenne en polarisation circulaire ( mode hybride 3 dB)
Figure IV.42: Diagramme de rayonnement de l'antenne pour V=15V
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
IV.4.5.1.Conclusion
Uncoupleurhybridereconfigurableatconuetralisavecsuccsdans lebutdereconfigurer
uneantenneenpolarisation.Sil'oncomparenotreconceptl'exempleexposauparagrapheIV.4.1,
notresolutionapourprincipauxavantagesunegrandecompacitetunegrandesimplicit.Eneffet,
lecoupleurpeuttretotalementintgrsousl'antenneetiln'yaaucunproblmepourpolariserles
diodes tant donn que les lignes de transmission sont dconnectes. Les diodes varactors ne
consommentaucuncourantDClorsquellessontpolariseseninverseetsontparfaitementisoles
deslmentsrayonnantscequipermetd'vitertoutcouplageindsirable.Enfin,cesystmeoffreun
ensemble complet de polarisations possibles en changeant simplement l'tat d'un commutateur
SPDTetlatensionauxbornesdedeuxdiodesvaractors.Lafaisabilitduconceptatclairement
dmontreetvalideparlamesuredesparamtresS
ij
etdesdiagrammesderayonnementsurun
prototype.
IV.5. ANTENNERECONFIGURABLEENPOLARISATION
LINAIRE
Nous allons ici proposer une nouvelle architecture pour effectuer une rotation sur 90 de la
polarisation linaire d'une antenne. De nombreux systmes de transmission utilisent deux
polarisations linaires orthogonales respectivement pour la transmission et la rception (Figure
IV.43). Le principal avantage est de pouvoir utiliser le mme canal pour la liaison montante et
descendante.
Sil'unedesdeuxantennesestmobile,onpeutsetrouverdanslecasolesantennesquidoiventse
transmettre un signal n'ont pas leur polarisation linaire dans le mme plan, les pertes de
dpolarisationvontalorsdpendredel'angleentrelesdeuxplansetserontdonnesparl'quation
(IV.26).
Pertes dedpolarisation(dB)=20log( cos(0)) (IV.26)
136
Figure IV.43: Systme mission-rception avec antennes polarisation linaire orthogonales
Rcepteur
metteur
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Unesolutionpourcorrigerladsadaptationestdepermettreunerotationsurl'axezdel'antenne
pourobtenirtoujourslameilleurepolarisationlinaire,maislessystmesmcaniquessontcoteux
etpeuventsouffrirdeproblmesdefiabilit.Unedeuximesolutionencorepluscoteuse,consiste
sebasersurunpolarisateurmagntiqueeffetfaradayquiutilisedesmatriauxdiamagntiques.
Cetypedecomposantestcapabledemodifierl'angledepolarisationd'uneondelinairepartir
d'une tension. Le prototype propos ici utilise sur une mme antenne les deux polarisations
orthogonalesetpermetd'effectuerunerotationsurl'azimuthde90demanirelectronique.
Nousallonsutiliserlecoupleursemidiscretentantquediviseurdepuissancereconfigurable.Pour
ralisercettefonction,ilsuffitdedphaserde90leportisol(FigureIV.44.a).Onaainsilesdeux
sortiesenphaseaveclapossibilitdereconfigurerlecouplageentrelesdeuxports.
(a) (b)
Figure IV.44: (a) Topologie du systme et (b) masque de l'antenne
Cecoupleurpermetd'alimenteruneantenneexcitepardeuxfentesorthogonales.Lesdeuxfentes
sont donc toujours alimentes par deux signaux en phase, ainsi l'antenne rayonne toujours une
polarisationlinaire.Sionchangelerapportduniveaudesdeuxsignauxalimentantl'antenne,une
rotationdelapolarisationlinaireestalorspossible.
IV.5.1. Simulationsetmesures
Pourlaralisation,nousavonsslectionnunsubstratsuprieurd'unepaisseur0,762mmetd'un
substratinfrieurd'paisseur0,130mm.Pourlesdeuxsubstrats,lapermittivit
r
estde2,22.Les
mesuresdesparamtresSduprototypesontprsentssurlafigureIV.45.a.Onobserveunebonne
adaptationdel'antennepourlestroistensionsinversesdesdiodes.Labandepassanteestlimitepar
leS
11
contrairementlaralisationprcdente(quitaitlimiteparleS
21
).C'estl'effetdudphaseur
en/4.Lediagrammederayonnementpourunerotationsuivantlanormalel'antenneestprsent
surlafigureIV.45.bpourlestroismmestensions.Lepolarisationmesureestbienlinairepour
lestroistensions.Onobserveunerotationde90entre0,9Vet15V.
137
/4
Z
1 Port 1
Port 2
Dphaseur
90
Antenne double
polarisation
orthogonale
Double coupleur
reconfigurable
Tension
inverse des
diodes
varactors
x
y
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
(a) (b)
Figure IV.45: (a) Paramtres S et (b) diagramme de rayonnement de l'antenne pour les tensions
0,9V, 4V et 15V
IV.5.2. Conclusion
Uneantenneenpolarisationlinairecapabledepivotercettepolarisationlectroniquementde90a
tprsente.Placeaufoyerd'uneparabole,ellepermettrad'obtenirlemaximumdetransmission
quelquesoitl'angledelapolarisationlinaireentrante.Ceprototype,nettementmoinscoteux
raliser,beaucouppluscompactequelessolutionsexistantes(mcaniquesetmagntiques).
IV.6. CONCLUSION
Dans ce chapitre, nous avons prsent le travail effectu sur les antennes reconfigurables en
polarisation.Nousnoussommesintresssdansunpremiertempsuneantennedoublebande
polarisationcirculairepourapplicationsatellitaire.Nousavonsensuitetudiuneantenneintgre
avecunMEMSreconfigurableenpolarisation.Avecunetensiondecommutationdel'ordrede3V,
cette antenne peut commuter son rayonnement entre une polarisation linaire horizontale et
verticaletoutenconservantunniveaudepolarisationcroisesuprieure25dB.
Par la suite, une architecture originale pour un nouveau type de coupleur reconfigurable
extrmementcompactatprsente.Lesdiodesvaractorspermettantdemodifierlerapportde
couplage entre les deux lignes ne consomment par de courant DC. En utilisant deux coupleurs
reconfigurablescascadsensrie,ilestpossiblededplacerlemodehybride3dBducoupleursur
plusde400%debande.
Sur la base de ce coupleur, nous avons propos deux applications antennaires. Une premire
topologie permet trs simplement de modifier le rayonnement du patch entre une polarisation
linaire et circulaire en modifiant la tension inverse des diodes entre 0,9 et 15 V. La deuxime
antenne permet de raliser une rotation lectronique suivant l'azimut de l'antenne de 90 pour
obtenirlemeilleurrapportdepolarisation.
138
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Chapitre IV : Antennes polarisation commande
Rfrences Chapitre IV
[IV.1]ChenWS.,WuCK.,WongKL.,"Singlefeedsquareringmicrostripantennawithtruncatedcorners
forcompactcircularpolarisationoperation", ElectronicsLetters,Vol.34, N11,pp.10451047,28
th
May
1998.
[IV.2]RaoH.,"WidebandCircularlyPolarizedRadialStubFedSlotAntenna",MicrowaveandOpt.Technol.
Lett.,Vol.43,N3,pp.211213,5thNovember2004.
[IV.3]LoWK.,ChanCH.,LukKM.,"BandwidthEnhancementofCircularlyPolarizedMicrostripPatch
AntennausingMultipleLShapedProbeFeeds",MicrowaveandOpt.Technol.Lett.,Vol.42,N4,pp.263
265,20thAugust2004.
[IV.4] Kossel M.A.,KungR.,BenedickterH.,BiichtokdW., "An ActiveTaggingSystemUsingCircular
PolarizationModulation",IEEETrans.onMicrowaveTheoryandTech.,Vol.47,pp.22422248,December
1999.
[IV.5]YangKP.andWongKL.,"DualBandcircularlyPolarizedSquareMicrostripAntenna",IEEETrans.
MicrowaveTheoryTech,Vol.49,pp.377381,March2001.
[IV.6]Momentum,AgilentTechnologies,SantaRosa,CA,2005A.
[IV.7]O'CaireallainS.B.D.,FuscoV.F.,"QuasiLumpedElementQuadratureCouplerDesign",Microwave
andOpt.Technol.Lett.,Vol.2,No.6.June1989.
[IV.8] ReedJ.andWheelerG.J., "AmethodofAnalysisofSymmetricalFourPortNetworks" IRETrans.
MicrowaveTheoryTech.,vol.MTT4,pp.246252,Oct.1956.
[IV.9]AccuP,AVXCorporation,MyrtleBeach,US,http://www.avxonline.com/.
[IV.10]MA46H120,M/AcomCompany,http://www.macom.com.
[IV.11] Matthaei G., Young L. and Jones E.M.T. "TEMMode, Coupledtransmissionline directional
couplers, and branchline directional couplers", Microwave filters, impedancematching networks, and
couplingstructures,Dedham,MA:ArtechH.B.,1980,ChapterXIII,Section10,pp.815819
[IV.12]WuY.F.,ChenF.C.,"ANovelReconfigurablePatchAntennaforDualPolarizationDiversity",AP
Symp.,Washington,July2005.
139
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Chapitre V
ANTENNESA
RAYONNEMENT
COMMANDE
ne association d'antennes alimente par un rseau dphaseur peut
dpointer son faisceau de rayonnement sans mouvement
mcanique. Libre des problmes lis l'inertie mcanique des
parties mobiles, ces systmes plus fiables peuvent pointer leur faisceau trs
rapidement, suivre plusieurs cibles en mme temps et mme modifier la
largeur de leur faisceau. Ces systmes n'ont pas reu une grande attention
jusqu' ces quinze dernires annes cause de leur complexit et de leur prix
prohibitif. L'arrive de commutateurs de qualit et de DSP bas prix a
permis aux rseaux d'antennes actifs de devenir une approche privilgie
pour les systmes radar et certains systmes de communication.
U
Dans le paragraphe II.3.2, diffrentes topologies possibles pour raliser un
dphasage ont t prsents. Nous allons proposer dans un premier temps
une solution base sur le dphaseur rflexion qui a une taille rduite et une
rponse large bande. Le principe des dphaseurs par sommation vectorielle
sera ensuite mis en oeuvre avec des coupleurs quasi-discrets. Puis, une
antenne reconfigurable en directivit grce des lments parasites sera
aborde. Enfin, nous terminerons par la conception d'un dphaseur ligne
commute pour alimenter des antennes 60 GHz totalement intgres sur
substrat silicium.
V.1Hybrideenmoderflexion...................................................142
V.2Dphaseurparsommationenquadrature............................150
V.3Antennereconfigurableaveclmentsparasites.................158
V.4RseautoutintgrsursubstratSiHighK..........................161
V.5Conclusion............................................................................169
141
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.1 HYBRIDEENMODERFLEXION
Le principe de fonctionnement du dphaseur en mode rflexion a t developp au paragraphe
II.3.2.4.Enparticulier,nousavonsmontrcommentiltaitpossibledemodifierdemanireactive
ledphasagesurleportisolenmodifiantdemaniresymtriquelalongueurdeslignesconnectes
auportdirectetauportisol.
V. 1.1 Rseauxd'antennesdeuxlments
V.1.1.1Principe
PourunrseaudeNantennes,ondduitassezintuitivementqueN1dphaseurssontncessaires
pouralimenterlerseau(FigureV.1).Or,pourunrseaud'antenneslinairepriodiquenombre
impair dlments, il convient de rpartir de manire symtrique les phases autour de l'antenne
centrale.Cettecaractristiqueestutiliseicipourrduirelenombredecommutateursncessaires
pourledphaseur.
V.1.1.2Conceptiondel'antenne2lments
L'architectureproposeutilisedeuxcoupleurshybridesenrflexion(FigureV.2)alimentsparun
diviseurdeWilkinson,letout,entechnologiemicroruban.LediviseurdeWilkinsonestcomposde
deuxlignesd'impdancecaractristique70,7etdelongueur
g
/4.leursextrmitssontrelies
l'unedesentresdescoupleurs.Lesdeuxextrmitsdeceslignessontaussireliesunersistance
de100.Lesdeuxbornesdelarsistanceconstituentlesdeuxsortiesdudiviseur.Considronsque
lediviseurestchargsursonentreetsesdeuxsortiespardesrsistances50.Danslecasd'un
signalinjectparl'entre,celuiciestdivisen2parlesdeuxlignes,lecoefficientderflexion
tant minimum puisque les deux sortiesramnent au niveau dela jonctiondeuximpdancesde
100 en parallle (adaptateur d'impdance quart d'onde). Aucun courant ne circule dans la
rsistancepuisquelesvecteurstensionsontgauxauxdeuxbornesdelarsistance.
142
Figure V.1: Distribution de phase pour un rseau de N antennes
p = 1
N+1
2
2 N N-1
N+3
2
N-1
2
Phase:
0 -
N-1
2
-
N-3
2
-
N-1
2
N-3
2
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Simaintenantunsignalestinjectsurunedesdeuxsorties,unepartiedusignalvasurl'entrealors
qu'uneautrepartiesepropageversladeuximesortie.Commelesignalaparcouruunelongueurde
/2 (deux lignes /4) il arrive au niveau de la deuxime sortie en opposition de phase avec la
premire sortie. Ainsi lesignalvoit unecharge de 50par rapport la premire sortie et toute
l'nergieestdissipedanslarsistance.Ladeuximesortieresteainsicompltementisoletout
signalentrantsurleportdesortieoppos.L'objectifdudiviseurdeWilkinsonestdepermettreune
isolationparfaiteentrelesdeuxcoupleurshybridesenmoderflexion.
Auniveaudescoupleurs,lesdeuxbranchesdesortiesontconnectesentreellespardeslignesde
dphasage.Lesignalsepropageensuivantceslignesetserflchitsuruncommutateurouvert.
Dans le cas o tous les commutateurs sont ferms, la structure est parfaitement symtrique, les
signauxsecroisentauniveaudeslignesdedphasageetarriventenphasesurlesportsisolsde
deux hybrides. Ainsi, les commutateurs peuvent modifier les longueurs des lignes de rflexion,
c'estdireledphasageralisparlesdeuxhybrides,enajoutantaupremierhybrideleboutde
lignequiestsoustrait ausecond. Le circuitpermet donc degnrer conjointementledphasage
pour l'antenne p et l'antenne Np de notre rseau. Comme les coupleurs sont termins par des
ractances diffrentes (la phase ramene dpend de la longueur de la branche), un diviseur de
Wilkinson est ncessaire pour rduire les dsadaptations et interfrences entre les hybrides.
Concernant les commutateurs, lutilisation de diodes PIN [V.1] est privilgie si lon dsire
optimiserlavitessedecommutation.Parcontre,desMEMS(MicroElectroMechanicalSystems)
sontprfrablessilondsireoptimiserlespertesdinsertionetlaconsommation[V.2].
V.1.1.3Prototypepassif
Les lments rayonnants sont des antennes imprimes sur un substrat d'paisseur 1,5 mm et de
permittivitdilectriquerelative
r
=2,2.Lecircuitdedphasageestimprimsurunsubstratayantla
mmepermittivitdilectriquemaisd'paisseur0,758mm.Lespatchssontalimentspardesfentes
graves dans le plan de masse du circuit dalimentation (Figure V.3.a). Ces fentes sont
lctromagntiquement couples aux lignes microruban de sortie du dphaseur imprim sur le
substratinfrieur.
143
Figure V.2: Topologie du circuit d'alimentation de l'antenne 2 patchs
Entre
Switchs
Coupleur
hybride
Diviseur Wilkinson
100
Signal dphas
de +n
Signal dphas
de -n
/4
Z
w
=70.7
/4
Z
w
=70.7
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
(a)
(b)
Figure V.3: a) Vue 3D de l'antenne rseau b) Vue de dessus : coupleurs hybrides en gris fonc,
fentes en noir, patchs en gris clair
L'espacemententrelesdeuxpatchsestde0,7
0
pourlimiteruncouplagemutueltropimportant(
0
tantlalongueur dondedans lair dusignallafrquencedefonctionnement). Lesfentessont
positionnessouslesbordsoppossdesdeuxpatchsetgnrentdoncleursurfacedesdensitsde
courant naturellementdphases de 180(FigureV.3.b). Les switchs, insrs dansles interstices
prvus cet effet (Figure V.3.a), sont simuls et raliss par des connexions mtalliques
rectangulairesdedimensions2,1x1,5mm
2
.
Chaque partie du systme a t individuellement simule et optimise avec le simulateur
lectromagntique Agilent Momentum pour une frquence de 5,8 GHz. Nous avons ensuite
assemblavecprcautioncesdiffrentslmentssurunmmesubstrat.Lesmesuresdel'adaptation
sontprsentessurlafigureV.4.a.Nousobservonsunetrsbonnecorrlationdesrsultatsentrela
simulationetlesmesures.Labandepassantemesure,conformeauxrsultatsdesimulation,estde
300MHzentre5,7GHzet6GHzavecetsanscommutationdesswitchesN1etN2.Avecles
switchs ferms, pour lesquels un dphasage de 180 entre les deux antennes est prvu, nous
observons une absence de rayonnement dans l'axe et deux lobes qui pointent +/ 45 (Figure
V.4.b).Aveclesswitchsouverts,lesystmedphasel'alimentationrelativedesdeuxantennesde
180,etlesdeuxpatchsrayonnentalorsenphaseetproduisentunmaximumderayonnementdans
l'axeavecungainmesurde6,2dBi.
(a) (b)
Figure V.4: (a) S
11
pour et (b) diagrammes de rayonnement pour 2 lois de phase
144
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Cecircuittrssimpleapermisdevrifiernosprdictionsthoriques.L'tapesuivanteconsiste
intgrerdeslmentsactifsauseindelastructure.
V.1.1.4Prototypeaveclmentsactifs
Lasolutionlaplussimpleestd'utiliserdesdiodesPIN.Nousavonsdansunpremiertempsralis
un systme avec une seule commutation possible pour raliser comme prcdemment soit un
pointagedufaisceaurayonndansl'axe,soitunminimum danscettedirection.Notrechoixs'est
port sur les diodes PIN MA4SPS502 de M/ACOM [V.3]. Leurs dimensions sont rduites
(1,4*0,5mm)etlarsistancesrielorsqueladiodeestpolariseendirectestde2,4. Ledfaut
majeurdecetypedecomposantestsonisolationenmodebloququipeinedpasserles20dB
pourlesmeilleurscomposants.Unemesureindpendantedel'isolationdecettediodePINadonn
16dB.Toujourspartirdummemontage,nousintgronslesdiodesdanslesfentesauniveaudes
lignesquirelientlesdeuxcoupleurs.Pourpolariserlecircuit,desplotsdepolarisationsontajouts
surleslignesdesdeuxcoupleurs(FigureV.5.a).Cesplotssontcompossd'uneligneen
g
/4pour
ramener un circuit ouvert sur la ligne du coupleur, et d'un stub radial en
g
/4 pour empcher
l'nergiedesepropagerverslasourced'alimentation.Deplus,lalignedepolarisationestlaplus
finepossiblepourprsenteruneimpdancecaractristiquemaximale(suprieure150). Pour
viterlecourtcircuit,unefentetrsfineestralisedansl'unedesbranches(FigureV.5.b),puisdu
ruban mtallique avec de la colle isolante est appliqu pour maintenir la continuit RF tout en
isolantlecourantcontinu.
(a)
(b)
Figure V.5: (a) Masque du dphaseur (b) Photographie du dphaseur
Le prototype a t simul et mesur. L'adaptation pour lemode ONet OFF des diodesPINest
prsent sur la figure V.6.a. Les rsultats montrent un lger dcalage frquentiel de 2% de la
frquenceoleS
11
estminimal.Labanderesterelativementconstanteautourde5,75GHz(5%de
bandepassante). Surla figure V.6.bsont prsentslesdiagrammes derayonnement del'antenne
pourlesdeuxtatsavecunecomparaisonaveclesrsultatssanslesdiodesPIN(mesursavantde
lesmettresurleprototypedoncentenantcomptedeslignesdepolarisation).Onobservequeles
diodes PIN ne dgradent que trs peu les rsultats, le gain est rduit de 0,7 dB par rapport
l'antennepassive(5,4dBiaulieude6,1dBi).
145
coupure DC
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
(a)
(b)
Figure V.6: (a) Adaptation du dphaseur pour les deux tats des diodes PIN (b) Diagramme de
rayonnement avec et sans les diodes PIN
Cesrsultatssontconformesauxsimulations.UntelrseaudphaseurbasedediodesPINpermet
desreconfigurationsextrmementrapides,del'ordrede5ps.Cependantnousavonsvuqu'unrseau
deuxlmentstaitlimitauniveaudesafocalisation,doncnousnoussommesintresssun
rseau3lments.
V. 1.2 Rseau3lments
V.1.2.1Conceptiondel'antenne3patchs
Suivant le mme principe, nous avons dcid de concevoir un rseau trois lments avec une
nouvellearchitectured'alimentation.Cecipeuttrefaitaveclemmenombredecommutateurssi
l'lmentcentralestalimentavecunephaseconstanteprisecommerfrenceetlammetechnique
d'alimentationparrflexionpourlesdeuxpatchslatraux.Pourmaintenirunboncomportementsur
unelargeplagedefrquence,uneloidephaseconstantedoittremaintenuesurcettebande,cequi
impliquequelesignald'alimentationdetousleslmentsrayonnantsdoitsepropagersurlamme
distancedeligne.Leproblmetaitdeconcevoiruncircuitavecunelongueursuffisantepourle
circuit d'alimentation de l'lment central. Pour allonger cette distance tout en conservant la
symtrie du circuit, nous avons choisi de diviser le signal du patch central en deux l'aide de
diviseursdeWilkinsondsquilibrs.Cesdeuxligneslatralescontournentlescoupleurshybrides
etserejoignentjusteavantd'alimenterl'antenne.Deplus,pouramliorercecircuitd'alimentation,
unedessorties50 dudiviseurdeWilkinsonattransformeenunesortie100(FigureV.7).
Nousavonsutilislefaitqueparsanature,undiviseurdeWilkinsondsquilibrabesoind'un
adaptateurquartd'ondeaprslarsistancede100 pourramenerl'impdancedelaligne50
(FigureV.8.a)[V.4].
146
diodes PIN OFF
diodes PIN ON
Frquence (GHz)
S
1
1
(
d
B
)
Diodes PIN OFF
circuit ouvert
Diode PIN ON
court-circuit
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Eneffet,lerapportdecouplageentrelesdeuxsortiesestdfiniparlerapportentrelesimpdances
caractristiquesZ
0A
etZ
0B
.Pourmainteniruncomportementidal(adaptationparfaiteetisolation
desdeuxportsl'unparrapportl'autre),ilfautrespecterl'ensembledesrelationsdcritesen(V.1).
k =
S
21
S
31
Z
0A
=Z
0
.
1
3/ 2
.k .k
Z
0B
=Z
0
1/4
.k .1+k
Z
0C
=Z
0
1
1/ 4
.k
Z
0D
=Z
0
1/ 4
.k R
w
=Z
0
( .k+
1
.k
)
(V.1)
LesdiviseursdeWilkinsondsquilibrsonttconuspourcrerunrapportd'amplitudedek=2
entrelesdeuxsorties.Pourcecouplage,ontrouvepourlesdiffrentesimpdancescaractristiques:
Z
0A
=51,Z
0B
=102,Z
0c
=42,Z
0D
=59etR
w
=106.
Nousavonsdoncchangl'impdancecaractristiquedelaligneZ
0D
pourtransformerl'impdance
caractristiquedesortieen100aulieude50.L'impdancecaractristiqued'unelignequart
d'onde pour transformer une charge Z
s
en un charge Z
l
est donne par l'quation (V.2). Donc
l'impdance au niveau de la rsistance du ct du port 3 est de 70 , et enfin pour avoir une
impdance de sortie au port 3 de 100 , il faut Z
0D
=83 . Ainsi, partir du port 3, on peut
connecteruneligned'impdancecaractristique100.
Z
T
=
.
Z
S
Z
L
(V.2)
147
Figure V.7: Topologie du systme
Entre
Switchs
Coupleur
hybride
Diviseur Wilkinson
100
Signal dphas
par -
100
100
Diviseur Wilkinson
dsquilibr 1:2
Signal avec 0 de
dphasage
Coupleur en T
ligne 50
ligne 100
1/1
1/3
1/3
1/3
1/2
1/2
1/6 1/6
1/3
1/3
Diviseur Wilkinson
dsquilibr 1:2
Signal dphas
par -
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
(a)
(b)
Figure V.8: (a) Diviseur de Wilkinson dsquilibr, (b) Vue 3D de l'antenne
Simaintenant,ons'intresselarpartitiondespuissancesdanslecircuitd'alimentation(Figure
V.7), on observe bien que chaque antenne du rseau reoit la mme quantit d'nergie. Pour
l'antenne centrale, une simple jonction T est utilise pour relier les deux lignes 100 qui se
recombinentenuneligne50.Dansdesconceptionsfutures,desdiviseursdeWilkinsonavecdes
rapports d'amplitude diffrents pourront tre utiliss afin d'alimenter les lments avec des
amplitudesdiffrentespournotammentrduireleniveaudeslobessecondairesrayonns.
V.1.2.2Prototypeetrsultats
L'antenneestraliseaveclemmesubstratqueprcdemment.Pourlecircuitdedphasage,nous
avons choisi un substrat de mme paisseur que prcdemment (0.762mm) mais avec une
permittivitrelativede
r
=3.2aulieude2.2(FigureV.8.b).Cechoixatfaitpourpermettrede
positionnertoutlecircuitsouslesantennes.LafigureV.9.aprsentelemasquedel'antenneavec
soncircuitd'alimentation.
Les courbes mesures et simules du S
11
sont prsentes sur la figure V.9.b alors que tous les
switchs sont ON ou que seul le switch N1 est ON. Malgr une corrlation mdiocre entre les
rsultatssimulsetmesurs,labandepassantemesurepourunS
11
infrieur10dBestde7%
(400 MHz) autour 5.8 GHz pour les diffrents cas. Une hypothse avance pour expliquer la
mauvaise correlation entre thorie et pratique rside dans le fait que les diviseurs de Wilkinson
peuventcacherunepartiedeladsadaptationducircuitendissipantl'nergiedanslesrsistances.
(a)
(b)
Figure V.9: (a) Vue de dessus : coupleurs hybrides en gris fonc, fentes en noir, patchs en gris clair
(b) S
11
pour 2 lois de phase
148
0.758 mm
1.5 mm
r
=3.2
r
=2.2
z
y
x
0.7 0
Z
0C
/4
/4
R
w
Port 2
Port 3
Port 1
/4
/4
Z
0D
Z
0
A
Z
0
B
Z
0C
/4
/4
R
w
Port 2
Port 3
Port 1
/4
/4
Z
0D
Z
0
A
Z
0
B
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LesrayonnementsenchamplointainsuivantleplanxzsontprsentssurlafigureV.10.apourune
frquencede5,8GHz.Avectouslesswitchsferms,lespatchssonttousalimentsaveclamme
phaseimposantunlobederayonnementprincipalauznithdegain8,2dBi.Unedirectioncorrecte
defocalisation(3)estobservparrapportlathorie(0),verifiantquetousleslmentsontt
alimentsenphase.Cependant,deslobessecondairesnonparfaitementsymtriquesnousprouvent
que chaque lment n'est pas aliment avec la mme amplitude. Ce dfaut devra tre analys et
corrigdansdefuturesrtrosimulationsetralisations.
EnouvrantlapairedeswitchsN4,unephasede87estajoutel'antennegauchealorsqu'une
phasede93estsoustraitel'antennedroite,comparativementausignalderfrenceappliqu
l'lment central. Cette petite asymtrie de phaseestdue la largeurdu gapentre leslignesde
rflexionqui,enconsquence,introduituneffetcapacitifnonngligeable.
LafigureV.10.amontrequelelobeprincipalrayonneavecungainde7,3dBipourunanglede
=15cequiestenaccordavecladirectiondonneparl'quationthoriqued'unrseaulinaire
(I.17):14,5.
Lorquelesautresswitchssontouvertsparpaires,diffrentesdirectionspourlelobeprincipalsont
possibles.ParexempleenouvrantlesswitchsN1ouN5,lespatchssontalimentsenopposition
dephaseetlerseaurayonnedeuxlobessymtriques+et45avecuncreuxdansl'axe.
LaFigureV.10.billustrelerayonnementmesurenchamplointainlafrquencedetravaillorsque
lesswitchssontferms.Legaindulobeprincipalrayonnauznithn'estpasconstantsurlabande
maisrestetoujourssuprieur5dBi.Leslobessecondairesvarientaussisurcettebandejustifiant
quechaquelmentn'estpasrellementalimentaveclammeamplitudesurtoutelabandede
frquence. Cependant, il n'y a pas de dviation majeure du lobe principal (toujours 3), ce qui
prouvequetousleslmentssontalimentsaveclammeloidephaseentre5,6GHzet6GHz.
(a) (b)
Figure V.10: (a) Pour 2 lois de phase (b) Pour diffrentes frquences avec les switchs N1 et N2
ferms
V. 1.3 Conclusion
Trois prototypes dantennes rseaux ont t simuls, fabriqus et raliss pour vrifier notre
approchethoriquedudphaseurrflexion.Lesmesuresmontrentdesperformancesstablessur
une bande de 5% autour de 5,8 GHz. Une perspective de ce travail serait de remplacer les
connexionsmtalliquespardescomposantsactifstelsquedesdiodesPINoudesMEMS.
149
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.2 DPHASEURPARSOMMATIONENQUADRATURE
Dans le paragraphe II.3.2.5, un dphaseur bas sur la mthode de sommation de vecteurs a t
prsent.Deplus,nousavonsvuquepourconserveruneamplitudeconstantedusignaldesortie,il
fautassurerqueA+B=1,avecAetBtantl'amplificationsurlesdeuxentresdel'additionneur.
Touteslesstructuresprsentesdanslalittraturesurcettearchitectureutilisentdestransistorspour
fairevarier l'amplitude des vecteurs. Nousproposons ici d'utiliser noshybrides quasidiscrets en
tantquediviseursdepuissancereconfigurables(FigureV.11).
V. 2.1 Dphaseuravechybridequasidiscretreconfigurable
V.2.1.1Analysethorique
Nousavonsdoncbesoin,d'unepartd'uncoupleurenquadraturereconfigurable,etd'autrepartd'un
sommateur de puissance. Nous avons dmontr au paragraphe IV.3.1.2.2. que le coupleur quasi
discretpermettaitderaliserunetellefonction.
Pour l'additionneur, les solutions proposes dans les systmes base de transistors utilisent un
diviseurWilkinsonpourfairelasommevectorielle.
AvecuneamplificationAcapabledevarierentre0et 1000,ledphasagepeutvarierentre0et
89,9. Grce au Wilkinson, l'amplitude sur le port de sortie restera constante quelque soit
l'amplitudedesvecteursorthogonaux.Cependant,lamoitidel'nergieaumoinsestconsomme
parlarsistance.Lesystmedphaseurauradoncunrendementthoriquemaximalde50%.
Il convientdedterminerunesolutionplusconomiqueauniveaunergtique. tantdonnque
l'application vise pour ce dphaseur est l'alimentation d'un rseau d'antennes, il est possible
d'utilisercommeadditionneurunsystmeplusieurssorties.L'objectifdanscecasestdeconserver
unniveaugaletconstantsurlesdiffrentessorties.Cettesommationdevecteurs(FigureV.12)est
ralise par l'intermdiaire d'un hybride (3 dB, 180 ). Ce dernier suit exactement la mme
dfinition qu'un hybride (3dB, 90) au dtail prs que les ports directs et isols ne sont pas en
quadraturemaisenoppositiondephase.Leportisolducoupleurquasidiscretdoittrechargpar
uneimpdancede50.
150
Figure V.11: Topologie du dphaseur par sommation
A
.2
90 -
Port
d'entre
A
B
1
4
Additionneur
3
1
.2
90 -
.
(1A )
.2
180 -
A0-
3dB, 90
Coupleur
1
4
2
3
1
.2
180 -
10 -
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Enfaisantlasommationvectorielle,l'amplitudesurlesdeuxportsresteeffectivementconstanteet
gale(FigureV.13).Sileportd'alimentationestleport1,ledphasageentrelesdeuxportsest
donnparlarelation(V.3)aveck,lecouplageentrelesports2et3del'hybridequasidiscret.
1
=phase( S
31
)phase( S
21
)=2arctan ( k )/ 2 (V.3)
Si maintenant, on utilise le port 4 de l'hybride quasidiscret comme port d'entre, on obtient la
relationV.4.
1
et
4
varientdoncdelammefaonenfonctiondek,cependantilssontdcalsde
.
4
=phase( S
34
)phase( S
24
)=2arctan( k )+ / 2 (V.4)
Ornousavonsvuprcdemmentqu'avecuncoupleurhybridequasidiscret,iltaitpossibledefaire
varier le coefficient de couplage k entre 0,3 et 63 tout en conservant une quadrature de phase
correcteentreleportdirectetleportisol.
Pourlecoupleurhybride180,lasolutionlaplusconnueestcelledel'anneauhybride.Toutefois,
ellen'apastretenueenraisondelaplaceprohibitived'unetellearchitecture.Unesolutionplus
simpleconsistedphaserleportcoupld'unhybride90de /2(FigureV. 14).
151
Figure V.12: Topologie du dphaseur propos
Port 2
Port 3
Port
d'entre
o90 -
k, 90
Coupleur
1
4
2
3
10 -
3dB, 180
Coupleur
1
4
.
(1o )0 -
o
.2
180+
.
(1o)
.2
90 -
o
.2
90 +
.
(1o)
.2
180 -
2
3
Port 4
1
Figure V.13: Somme de vecteurs sur le port 2 et le port 3
Port 2
1
Port 3
2
1
.2
o
.
(1o )
.2
.
(1o )
.2
1
.2
o
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Pourledphasage,nousn'utiliseronsqu'unesimplelongueurdelignedelongueurl=
g
/4.
Pourlecoupleurhybride90,plusieurssolutionssontpossibles.Lechoixdpendranotammentde
lalargeurdebandesouhaitepourledphaseur.
Cependant,pourfaciliterlapolarisationdusystme,ilestprfrabled'utiliserunearchitectureo
lesports1et2sontlectriquementdconnectsdesports3et4,cardanslecascontraire,ilfaudra
ajouterdescapacitsdedcouplage.
Lecoupleurquasidiscretestdoncuncandidatprivilgipourcetteapplication.Onpourrautiliser
descapacitsfixeslavaleuradquatepourquelecouplageksoitgal1(mode3dB).Orla
bandepassante1dBd'untelcoupleurn'estquede6%.Sicellecis'avreinsuffisante,ilconviendra,
selonlammemthodequecelledcriteauparagraphe4.3.2.,demettreensrieplusieurshybrides
pourlargirlabandepassantedusystmeglobal.
Ainsiaufinal,notresystmeestcomposdedeuxcoupleursquasidiscretsetd'undphaseur90:
uncoupleurreconfigurableavecdesvaractors etundeuxime coupleur3dBavecdescapacits
fixes(FigureV.15).
Nousavonsvuquepouruncoupleurquasidiscretreconfigurable,onpeutobtenirunedynamique
decouplage(k)entre0,3et633,5GHz.
Apartirdel'quation(V.3),ontrouveunedynamiquededphasagepour
1
entre32et178.En
utilisantl'quation(V.4),onpeutcalculerladynamiquededphasage
4
pourunealimentationsur
leport4.Ledphasagevarieentre122et268.Nousallonsmaintenantvrifiercesrsultatsde
manireexprimentale.
152
Figure V.14: Hybride 180 partir d'un hybride 90
10 -
3dB, 90
Coupleur
1
4
-/4
1
.2
90 -
1
.2
180 -
1
.2
90 -
2
3
Figure V.15: Schma final du dphaseur
Port 1
Port 4
Port 2
Port 3
\
g
/ 8
C
var
C
var
C C
\
g
/ 4
50D 50D 50D
50D 50D
\
g
/ 8
\
g
/ 8 \
g
/ 8
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.2.1.2Ralisationetmesuresdudphaseursimple
Lesystmeatconupourtravaillerunefrquencede3,5GHz.Nousavonsralisunprototype
sur un substrat duroid
r
=2,2 et d'paisseur 0,125mm. Les diodes varactors sont les MA46H120
utilisesprcdemment.Pourlecoupleurhybride3dB,partirdel'quationIV.20,onpeutdduire
quelavaleurdelacapacitpouravoirunmodehybride3,5GHzestde0,909pF.Nousavons
doncchoisilemmemodlequeceluiutilisprcdemment(AccuPdelasocitAVX)maisavec
unevaleurde0,9pF.
LesdiffrentsparamtresS,pourunealimentationsurleport1,mesursenfonctiondelatension
depolarisationdesdiodessontprsentssurlafigureV.17.Lesignalreusurlesports2et3est
quasimentstableunevaleurde3dB.L'adaptationetl'isolationsontinfrieures15dBpourdes
tensionsdepolarisationdesdiodesvariantentre0.5Vet15V.Ledphasageentreleport2etle
port3varieentre90et195,cequiestcohrentaveclesprvisions.
153
Figure V.16: Masque du dphaseur
Diodes varactor
Capacits Dphaseur 90
Port 1
Port 4
Port 3
Port 2
Figure V.17: Paramtres S du dphaseur en fonction de la tension la frquence de 3,5 GHz
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LafigureV.18prsentelesparamtresSpourunesriedetensionsallantde1V15V.Ilexisteune
frquence3,5GHzol'amplitudesurlesports2et3resteconstantequelquesoitledphasage.Si
onsefixeunevariationmaximalede1dBentreleport3etleport4,onobtientunebandepassante
1dBde2%autourde3,52GHz.Cersultatpourraittreamliorenutilisantuncoupleurplus
large bande (par exemple en cascadant plusieurs coupleurs) et en utilisant un dphaseur 90
galementpluslargebande(enutilisantparexempledeslignesmtamateriaux[V.5]).
LedphasageenfonctiondelafrquencepourplusieurstensionsestdonnsurlafigureV.19.La
diffrencedephaseresterelativementconstanteenfonctiondelafrquence.Enutilisantleport1
ouleport4,ladynamiquededphasagemaximaleatteint240.Cersultatestdegrandequalit
tantdonnqueseulement2varactorssontutiliss.Malheureusement,ilnepermetpasdecouvrir
toutlecercletrigonomtrique.Nousallonsdoncproposerunevolutiondusystmepourobtenir
unedynamiquededphasagetotalesuprieure360.
154
Figure V.19: Dphasage en fonction de la frquence entre S21 et S31 et S34 et S24
Figure V.18: Paramtres S en fonction de la frquence pour une srie de tensions entre 1 et 15 V
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.2.1.3Conceptiond'undphaseurdouble
Une solution pour augmenter la dynamique du dphasage consiste tout simplement utiliser un
coupleur reconfigurable avec une dynamique plus grande. Nous avons vu au chapitre IV, qu'il
suffisaitdecascaderdeuxhybridespouramliorersadynamiquedecouplagek.Nousavonsobtenu
lafrquencede3,5GHzunedynamiquede0,00152.Cettedynamiquepermetunevariationdu
dphasage partir du port 1 de 3 177 ce qui est suffisant pour couvrir tout le cercle
trigonomtrique(FigureV.20).
Nous utilisons donc le mme coupleur que celui dcrit au paragraphe IV.3.2 3,5 GHz.
Le masque du dphaseur est prsent sur la figure V.21. On remarquera que le coupleur
additionneuratmodifipouradopterlammeformepluscompacteducoupleurdouble.
La figure V.22 montre la comparaison entre la simulation et les mesures des paramtres S en
fonctiondelatensioninverse.Lesignalestbiendivisentreleport2etleport3.Leniveauentre
ces deux ports reste relativement constant +/ 0.5 dB. L'adaptation et l'isolation sont toujours
infrieures15dB.Ledphasageentrelesports2et3variede125330pourunevariationde
latensionentre0,6Vet15V.
155
Figure V.21: Masque du dphaseur double
Figure V.20: Topologie du dphaseur double hybride
Port 1
Port 4
Port 2
Port 3
C
var
C
var
\
g
/ 8
C C
\
g
/ 4
50D
\
g
/ 8
C
var
C
var
50D 50D
50D
50D
50D
50D
\
g
/ 8
\
g
/ 8
\
g
/ 8 \
g
/ 8
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LesdphasagesentreS
31
etS
21
etentreS
34
etS
42
sontprsentssurlafigureV.23.Ledphasageest
toujoursstablepourrapportlafrquence.Onconstatedemmequ'ilestpossibleunefrquence
fixede3,5GHzd'obtenirtouslesdphasagespossiblesentre45et360.Nousavonsdoncralis
un dphaseur sur plus de 400 avec une tension variant entre 1V et 15V. Pour tre totalement
contrlable,ilfaudraitluiadjoindreenentreunaiguilleurSP2Tpourchoisirleportd'entresurle
premiercoupleurquasidiscret.
V. 2.2 Rseaud'antennesdeuxlments
Nousprsentonsunepremireapplicationquiutilisenotredphaseur360,oilest utilis pour
alimenterdeuxpatchsetainsiobtenirundpointagedufaisceaurayonn.
156
Figure V.22: Paramtres S en fonction de la tension inverse
Figure V.23: Dphasage en fonction de la frquence
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.2.2.1Conception
Nous avons eu recours des lments rayonnants dj utiliss. Le patch est coupl une ligne
microrubanparunefente.Nousutilisonsledeuximedphaseurquiprsenteunedynamiquede
dphasagedeplusde360.Ladistancechoisieentrelecentredespatchsestde0,7
0.
Lecircuitest
doncplacsouslesdeuxantennes(FigureV.24.a).Unephotographiedelaralisationestprsente
sur la figure V.24.b. Les fentes sont visibles par transparence en gris clair en haut de la
photographie.
(a)
Port 1 Port 2
(b)
Figure V.24: (a) Masque de l'antenne et (b) Photographie de la ralisation
V.2.2.2Mesures
Lessimulationsetmesuresdel'adaptationetdel'isolationsontprsentespourtroistensionsautour
de3,5GHzsurlafigureV.25.a.Enfonctiondelatension,labandepassanteestsoitlimiteparle
S
11
,soitparleS
21
.LesparamtresSsontinfrieurs10dBquelquessoientlestensions3.5GHz.
Labandepassantefinaleestde5%.Elleestenfaitlimiteparleslmentsrayonnants.
(a)
(b)
Figure V.25: (a) Adaptation et (b) diagramme de rayonnement de l'antenne pour trois tensions
diffrentes
157
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LafigureV.25.billustrelesdiagrammesderayonnementpourtroistensions.Onobservebienqu'il
est possible de reconfigurer le diagramme et de dpointer le faisceau de rayonnement. Le gain
maximalobtenuestde6dBipourunetensionde9V.
Le gain de directivit avec deux antennes est galement limit, nous proposons cidessous une
structurepremettantderaliserunrseau4lmentsrayonnants(FigureV.26).
V. 2.3 Rseaud'antennequatrelments
Pour alimenter ce rseau de quatre lments, nous avons choisi une topologie o 3 cellules de
dphasagesontncessaires.Pourquel'alimentationdurseausoitconformeunrseaulinaire,il
suffitd'assurerque
1
=2
2
.Lapolarisationdecerseauesttrssimplecarlesdiffrenteslignes
microrubannesontpasrelieslectriquement.
Cesystmen'apasencoretralis.Ilncessiteraitdeuxalimentationssparespourrglerles
phases
1
et
2
.
V.3 ANTENNERECONFIGURABLEAVECLMENTSPARASITES
NousavonsvuauparagrapheII.4.2.2.2,qu'unealternativeauxrseauxpourraliserdesantennes
directives est une antenne avec lments parasites. L'avantage d'une telle structure est que
l'alimentation de l'antenne principale est spare du systme de reconfiguration des antennes
parasites.
V. 3.1 Conception
Notretudes'estinspiredutravaildeL.Petit[V.6]oquiamontrqueparunevariationidentique
de la charge ractive sur le port d'alimentation de deux antennes parasites, il tait possible de
modifierlarayonnementdel'antenne:soitlerayonnementestdirectifversl'azimuthsoitdirectif
suivant le plan du rseau, soit omnidirectionel. Ainsi, en dsymtrisant les charges ractives
158
Figure V.26: Topologie du rseau quatre antennes
Dphaseur
2
Dphaseur
2
0
1
+
2
1
0
50
50
50
Dphaseur
1
Entre
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
chargeantlesantennesparasites,ilestpossiblededpointerlefaisceaurayonnsoitvers<0,soit
vers > 0parrapportauzenith.
Nous allonsdanscette tude nous intresser une variationsymtriquedes charges ractives,
partird'uneantenneparasitepardeuxantennespatchssatelliteschargesparunelignedelongueur
variable. Les simulations sont ralises avec le simulateur ADS Momentum. A 3,5 GHz, les
rsultats de simulation montrent un rayonnement directif simul suivant le znith pour une
ractancede23.Lemodeavecuncreuxendirectionduznithestsimulpouruneractancede5
.
Notre objectif est d'utiliser le double coupleur quasidiscret pour modifier de manire active
l'impdance ramene sur les deux antennes satellites. Les coupleurs sont positionns comme
indiqusurlafigureV.27.NousavonsvuauchapitreIVquesilacapacitdesvaractorstendvers0,
lesystmesecomportecommedeuxlignesdcouples.LaractanceR
1
vue depuisundesdeux
portsd'entreestalorsgalelaractanceduportopposdphaseparunelignedelongueur2*l
1
.
Silacapacitdes varactors suitlarelation(IV.20),ledoublecoupleurpermetlecroisementdes
signauxpuisquetoutel'nergieesttransmisesurleportcoupl.LaractanceR
2
vue parlesdeux
portsestalorsgalelaractancerameneparlesdeuxstubsencircuitouvert.
L'objectif,lorsdelaconception,seradeplacerR
1
etR
2
enoppositionsurledigrammedeSmith.
Ainsi,pourtouteslescapacitsintermdiaires,unmlangeestralisentrelaractanceR
1
etR
2
permettantd'obtenirtoutelesractancespossiblessurundemidiagrammedeSmith.
V. 3.2 Mesures
LemasquedusystmefinalestprsentsurlafigureV.28.Deslignesdepolarisationsontajoutes
pouramenerunetensioncontinueauxbornesdesquatrevaractors.Ceslignessontlesplusfines
possiblesparrapportlalimitetechnologiquedulaboratoire(0,1mm)pourinfluencerauminimum
lecomportementducoupleur.
Leprototypeatralissurdeuxsubstratscollsensemble:unpremiersubstrat
r
=2,2d'paisseur
0,125mmpourlecircuitd'adaptationetundeuximesubstrat
r
=2,2etd'paisseur0,732mmpour
lesantennes.
159
Figure V.27: Topologie de l'adaptateur de ractance base de coupleurs quasi-discret
Stub circuit ouvert
Vers le port d'entre de
l'antenne parasite gauche
l
1
C C C C
Vers le port d'entre de
l'antenne parasite droite
X
1
X
1
Stub circuit ouvert
Z
0
l
1
Z
0
l
1
Z
0
l
1
Z
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LesdiagrammesderayonnementpourdeuxtensionsdiffrentessontprsentssurlafigureV.29.
Lecreuxpourlatensionde1,1Vn'estpastrsprononc(diffrencede9,5dBentrelelobegauche
etlecreuxalorsqu'ensimulationonpouvaits'attendreunediffrencesuprieure20dB).Legain
obtenuauznithavecunetensioninversede15Vestde7,5dBialorsqueparlasimulation,ungain
suprieur8,5dBitaitattendu.
Ces rsultatssont relativement dcevantscar nous sommespnalisspar des longueurs de ligne
assezimportantes(plusde10).Lesractancesramenesparleslignesnesonticipluspurement
imaginairescequimodifiel'influencedesantennesparasitessurl'antenneprincipale.
Untelsystmepourraitprsenterdesperformancessuprieuressurunrseaudetailleplusrduite.
160
Figure V.28: Masque du rseau d'antennes parasites reconfigurable
Figure V.29: Simulation et mesure du diagramme de rayonnement pour deux tensions inverses
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.4 RSEAUTOUTINTGRSURSUBSTRATSIHIGHK
PouruneintgrationMMICd'unrseaudphaseur,seulelamonteenfrquencepeutpermettrede
rduire sa taille pour que la ralisation soit conomiquement viable. Nous nous sommes donc
intressslabandedes5764GHzcarelleprsenteuncertainnombred'avantages.Premirement,
lesantennessontphysiquementtrspetitescettefrquenceetsontdoncadaptesuneintgration
MMIC.Deuximement,cettebandedefrquencesdeplusde7GHzestlibredetoutelicenceaux
Etatsunis,enEuropeetauJapon,cequipermetunetrslargeinteroprabilitsurtoutleglobe.Des
transmissionsdel'ordreduGigabit/ssontpossibles.Deplus,grcel'absorptionlectromagntique
de l'oxygne qui est importante pour cette bande, la rutilisation de frquence dans un rseau
cellulaire est trs importante. Plusieurs applications peuvent tre vises comme la transmission
HDTVsansfil,lesstationsd'accueilpourportablesetl'USB2.0sansfil.Itohetalontproposen
2003 un rseau planaire de 4 antennes 60 GHz pour raliser un dpointage lectronique. Ce
systmeestintgraveclecircuitIFetlemoduleDSP[V.7].En2006,IBMadveloppunepuce
rceptriceetmettrice60GHzsurSilicium[V.8],lesantennessontnotammentintgresdansle
package[V.9].
V. 4.1 Introduction
L'antenne intgre que nous allons prsenter a t conue en collaboration avec l'Universit
d'Helsinki.EllepeuttreutilisepourdestechniquesdediversitspatialeetdeMIMOoupourdu
multiplexage spatial. Le rseau est compos de 5 lments rayonnants pouvant dpointer leur
faisceaudans9directionsdiffrentesdansundemiplan.Les9directionssont0,14,30,
48et67parrapportauznith(FigureV.30).
(a)
(b)
Figure V.30: (a) Diffrents dpointages du faisceau pour le rseau 5 antennes, (b) Topologie du
rseau
Pourraliserdemanireactiveledpointagedufaisceau,nousutilisonsundphaseursurchaque
antenne. Deux types de dphaseurs avec leur propre srie de dphasages sont conus tel que le
dphasage entre deux lments rayonnants conscutifs reste constant. Chaque dphaseur doit
pouvoircommuterentre9dphasagesdiffrents.Nousavonsdjvuquel'angledepointagedu
faisceaudpenddirectementdecedphasage.
Deplus,pouravoirunrseauaussicompactquepossibletoutenminimisantlespertes,latotalitde
l'antenneestconstruitesuivantleprocessMEMS.Grceunelongueurd'ondetrsrduitesurle
161
lment
rayonnant
lment
rayonnant
lment
rayonnant
lment
rayonnant
lment
rayonnant
Dphaseur
type 2
Dphaseur
type 1
Dphaseur
type 2
Dphaseur
type 1
Transceiver
0
14
30
48
67
-14
-30
-48
-67
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
silicium60GHz(
Si
=1,46mm),ilestpossibled'intgrerlesystmecompletaveclesantenneset
lesdphaseurssurunesurfacede0,5cm.
Pour les lignes de transmission, nous avons choisi la technologie CPW car l'antenne sera
caractrise avec des points GSG. De plus, pour des lignes trs proches, le couplage mutuel en
technique CPW reste trs faible. Enfin, cette technique permet un large choix d'impdances
caractristiquespourlalignetoutenmaintenantunencombrementminimum.
V. 4.2 Dphaseur
Nousavonsdoncfaitlechoixd'utiliserdescommutateursMEMSpourleursfaiblespertesetleur
hautelinaritencomparaisondesdiodesPIN.LastructureutilisepourlescommutateursMEMS
adj tprsentedans le chapitre III. Une architecture ligne commute a t choisie. Nous
avonsvuauparagrapheII.3.2.1.quelaconceptiond'undphaseurlignecommutesersumait
concevoir un circuit SPNT (une entre, N sorties). Des commutateurs sont alors placs
judicieusementpourforcerlesignalprovenantdel'entres'orienterversl'unedecessorties.
DeuxsolutionspeuventtreenvisagespourunSPNT:lescommutateurssriesoushunts.Dansle
casdescommutateurssries,ceuxcisontplacsleplusprspossibledelajonction(FigureV.31.a).
Cettearchitectureestlaplusintuitivemaisellealedfautd'trecomplexemettreenoeuvrequand
les commutateurs ont une taille importante par rapport aux lignes d'alimentation. En effet dans
notre application, tant donn que l'on a souhait rduire la tension d'activation des structures
MEMS,nousavonschoisidestaillesd'lectrodesassezimportantes(200*200um).Unestructure
purementsrien'estdoncpasralisable.
(a)
(b)
Figure V.31: (a) Topologie pour un dphaseur srie (b) et pour un dphaseur shunt
La deuximesolution estl'utilisationdecommutateursMEMS shunt. Ceuxci doiventalors tre
placs une distance lectrique de
g
/4 (Figure V.31.b). Lorsque les MEMS sont activs, ils
ramnentuncourtcircuitunedistancede
g
/4delajonction,cequiestquivalentuncircuit
ouvertpourcettejonction.Pourtransmettrelesignalsurunport,ilfaudradoncquetouslesautres
ports aient leurs commutateurs shunts activs. Cette solution a pour avantage de dporter les
commutateurs loin de la jonction ce qui permet l'intgration de MEMS de grande taille.
L'inconvnientmajeurdecettearchitectureestqu'elleimposeundphasageminimalde180cequi
augmentelespertestotalesdudphaseur.
162
/4
/4
/4
/4
/4
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Lasolutionquenousavonsproposeestuncompromisentrelesdeuxprcdentesarchitectures.Le
principeestprsentsurlafigureV.32.
PourchaqueSP3T,lesignalpeutallerverslehaut,lebasoutoutdroit.Pourquelesignalailletout
droit,ilfautquelesdeuxswitchsshuntcourtcircuitentlesbranchessuprieuresetinfrieures.Ces
deuxbanchesprsententainsiauniveaudelajonctiondeuxcircuitsouverts.Leswitchsrieestlui
aussi activ ce qui permet de transmettre l'intgralit du signal par la branche du milieu.
Maintenant,pourquelesignalpasseparlabrancheduhautoucelledubas,ilsuffitqueleMEMS
shuntdelabrancheopposesoitenmodeONalorsquelesdeuxautresMEMSsontdanslemode
OFF.
Le principal avantage des cette architecture par rapport aux propositions prcdentes est sa
simplicit.CeSPNTnencessiteaucuncircuitd'adaptationetilestparfaitementcompatibleavec
leslignesCPW.Nousavonsdoncchoisidemettreensriedeuxdphaseursdecetypepourobtenir
aufinal9dphasagespossibles.
Ledtail des9dphasagesralisspar les9 configurationspossiblespourlescommutateursest
donndansletableauV.1.
N
n du MEMS:
1 2 3 4 5 6
Dphasage
()
1
ON ON ON ON ON ON
132
2
OFF OFF ON ON ON ON
107
3
ON OFF OFF ON ON ON
72
4
ON ON ON OFF OFF ON
34
5
OFF OFF ON OFF OFF ON
0
6
ON OFF OFF OFF OFF ON
-34
7
ON ON ON ON OFF OFF
-72
8
OFF OFF ON ON OFF OFF
-107
9
ON OFF OFF ON OFF OFF
-132
Tableau V.1: tats de diffrents commutateurs pour les 9 dphasages
163
Figure V.32: Topologie du dphaseur
/ 4
/ 4
/ 4
/ 4
S e r i e s s w i t c h
S h u n t s w i t c h e s
1
2
3
4
5
6
Switch srie
Switch shunt
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Ce rseau dphaseur est bas sur les commutateurs MEMS prsents au paragraphe III.3.2.
L'ensembledelastructureatsimulsousHFSS(FigureV.33.a).Despontsairsontncessaires
pourassurerlacontinuitlectriqueetsupprimerlemodepair.Lapositiondecespontsairest
critiqueauniveaudespertesd'insertion.Deplus,enfonctiondel'tatdesdiffrentscommutateurs,
lapositionoptimaledespontsairneserapaslamme.
AinsilafigureV.33.bprsentelespertesd'insertionetl'adaptationdudphaseurpourdeuxtats
distinctsenfonctiondeladistanceentrelespontsairetlajonction.Lespontsairontunelargeur
de20m.Dansl'tatN1,touslescommutateurssontactivs,donclesignalpasseparlesdeux
lignes du milieu. On remarque que la position optimale des ponts air se situe 40m de la
jonction.Pourl'tatN2,seulslesswitchsshuntgauchedelajonctionsontactivs,cequiforcele
signalpasserparleslignesdedroite.Danscecas,onobservequelapositionoptimalesesitue
plusloindelajonctionparrapportaucasprcdant(90m).
Ilestdoncindispensabled'adopterunepositionintermdiairepourleplacementdespontsairpour
avoirdespertesquivalentesquelquesoitl'tatdudphaseur.Cettepositionoptimaleestgrisesur
lafigureV.33.betdonnedoncunedistancede60mentrelajonctionetlespontsair.
(a)
(b)
Figure V.33: (a) Simulation sous HFSS (b) Paramtre S en fonction de la position des ponts air
V. 4.3 ANTENNES
LerseauetleslmentsrayonnantsontaussitconusaveclelogicielHFSS.Lebuttaitde
concevoir une antenne couvrant la bande de frquence des 6064 GHz avec un diagramme de
rayonnementomnidirectionneletuncoefficientderflexioninfrieur10dBsurcettebandede
frquence. Les antennes de type fente ont t choisies au dpend des antennes patchs pour leur
bandedefonctionnementpluslargeetleurspertesglobalesinfrieures.L'lmentrayonnantestune
fenterectangulaire(FigureV.34.a)alimenteparuneCPWcommeprsenteen[V.10].Nousavons
optimislediagrammederayonnementpourtreomnidirectionnelsurlabande defrquencede
fonctionnement. Pourcetteraison,labandepassantedenotreantenneestunpeuplustroiteque
l'antenneoriginale [V.11].Pourl'antenneseule,labandepassantesimuleestinfrieure10dB
entre60,5GHzet64,2GHz(bandede6,4%).Lasimulationpourl'antenneseuleestprsentesur
lafigureV.35.Surcettebande,lediagrammederayonnementestomnidirectionnel.
164
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
(a)
(b)
Figure V.34: (a) Masque de l'antenne (b) Vue 3D sous HFSS du rseau
Pourlerseau,les5lmentssontplacsenligne(figureV.34.b).L'espaceentredeuxlments
conscutifsestde0,4
0
60GHzdansl'espacelibre.Ilestimportantquelecouplageentreles
diffrentesantennessoitminimalcarilpeutcauserdescreuxdanslediagrammederayonnement,
ainsi que des modifications de la frquence de rsonance. Pour limiter cet effet de couplage, la
mthode de neutralisation propose dans [V.11] pourra tre implmente dans des ralisations
futures.L'adaptationpourlesantennesunefoismisesenrseauestprsentesurlafigureV.35.On
observequelamiseenrseautenddiminuerlafrquencedersonancedesantennes.Dansles
ralisationsultrieures,ilpourratreenvisagdemodifierlagomtriedesantennesenfonctionde
leurplacedanslerseaupourmaintenirlafrquencedersonancestable.Lorsdecettetude,nous
n'avonspasoptimiscesdiffrentsparamtres,lebuttantderaliserunprototypepourvaliderla
faisabilitduprincipe.
165
1.09mm
1
1
3
m
m
Pad RF
Figure V.35: Adaptation pour l'antenne seule et pour les antennes mises en rseau
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
A partir de ces diffrentes tudes, le systme complet avec les dphaseurs a t fabriqu. Les
diffrents lments qui composent ce systme, ont aussi t raliss sparment afin de les
caractriserchacunindpendamment.
V. 4.4 Ralisationetmesures
L'antenneetlesdiffrentslmentsonttfabriqusavecleprocesscustomisMUMPS+.
Pourtestersparmentlesdiffrentslments,lesantennes,lerseaud'antenneetlesdphaseurs
onttplacssurunsubstratde1*3cm(FigureV.36).
V.4.4.1Dphaseur
Unevue3DdudphaseurraliseaumicroscopeconfocalestproposesurlafigureV.37.
166
Figure V.36: Substrat de test ralis avec le process Mumps+
Antenne fente
Structure
complte
MEMS Shunt
MEMS Srie
Figure V.37: Vue 3D du dphaseur sous scanner confocal
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
Ledphaseurn'amalheureusementpasputremesur.Eneffet,lesdiffrentesmesureseffectues
dansleslaboratoiresduL2MPetVTTn'onttralisesquesurcertainsMEMSindpendants.Les
rsultatsonttprsentsauchapitreIII.Eneffetdesmesurescomplmentairesontmontrquele
process de MEMScap ne respectait pas les spcifications fournies. Ainsi, une mesure de la
rsistivitdupolysiliciumnousadonnunevaleurde40800/ aulieudes10/ annoncs.
Pour caractriser le dphaseur complet, il est ncessaire que plusieurs MEMS fonctionnent et
puissenttrecommutsimultanment.
V.4.4.2Antennes
Diffrentesantennesonttralisespourpermettreuntalonnagedenosprocduresdetest.Une
antennemonopoleetdesantennesenanneauadaptesparstubonttplacessurlesubstrat.Une
vue3Ddel'antenneralisel'aided'unspectromtreconfocalestproposesurlafigureV.38.
LafigureV.39 prsentelesrsultatsdesimulationetdemesuresdel'antennefente.Onnoteune
faiblediffrenceauniveaudelafrquencedersonancede1,6%parrapportlasimulationcequi
esttrscorrectetencourageantpourlapremireantenneintgrefonctionnant60GHzraliseau
LEAT.Labandepassante10dBestunpeusuprieureauxprvisions(59,5GHz64GHz).
Figure V.39: Simulation et mesure de l'adaptation de l'antenne
167
Figure V.38: Vue 3D de l'antenne au spectromtre confoncal
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
LafigureV.40prsenteunephotographiedelamoitidel'antennefinale.Onpeutvoir,enhautde
laphotographie,3des5antennesdurseauavectouslesdphaseursendessous.Lerseaucomplet
n'a pas encore pu tre mesur, le dphaseur n'tant pas oprationnel. Cependant les rsultats
obtenussurlescommutateursMEMSseulsetlesantennessontencourageants,cequinousconforte
dansnotreapproche.
Figure V.40: Photographie du demi-systme
168
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
V.5 CONCLUSION
Nousavonsaborddanscechapitrediffrentestopologiespermettantdereconfigurerlediagramme
derayonnementd'uneantenneetnotammentbalayerdemanirelectroniqueunfaisceaudirectif.
Unepremirearchitectureutilisantdescoupleurshybridesenmoderflexionatprsente.Parla
suite,unesecondesolutionbasesurlasommationdevecteursorthogonauxattudie.Utilisant
descoupleursquasidiscretsreconfigurables,ellepermetundphasagevariationcontinuesurplus
de360entredeuxportsdesortie.Cettepropritestintressantepourdesapplicationsradarpar
exemple. Une tude portant sur des antennes avec des lments parasites actifs a montr la
possibilitdereconfigurerladirectivitd'uneantenneenmodifiantl'impdanceramenesurdeux
antennessatellitesplacesdanslechampprochedel'antenneprincipale.Lecoupleurquasidiscreta
tutilispourmodifierlachargedesdeuxantennessatellites.Enfin,unearchitecture60GHza
tproposeutilisantundphaseurlignecommute.Cerseaun'amalheureusementpasputre
entirement caractris mais sa conception a montr tout l'intrt du laboratoire pour une telle
structurequipermetuneralisationmonolithiquedudphaseuretdesantennes.
169
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
ChapitreV:Antennesarayonnementcommand
RfrencesduchapitreV
[V.1]GlanceB.A,"FastLowLossMicrostrippinPhaseShifter",IEEETrans.onMicrowaveTheoryand
Techniques,Vol.27,Iss.1,pp.1416,Jan1979.
[V.2] KimB.T.,Park J.H.,YimJ.,KimY.K.andKwonY.,"AcompactVBand2BitReflectionType
MEMS Phase Shifter", IEEEMicrowave and Wireless Components Letters, Vol. 12, N. 9, pp. 324326,
September2002.
[V.3]MA4SW110,M/AComCompany,2004.
[V.4]J.S.Lim,S.W.Lee,C.S.Kim,JunSeokPark,D.Ahn,andS.Nam,"A4:1unequalWilkinsonpower
divider",IEEEMicrowaveandWirelessComponentsLetters,Vol.11,N.3,pp.124126,March2001.
[V.5] Antoniades M. A., Eleftheriades G. V., Compact linear lead/mag metamaterial phase shifter for
broadbandapplications,IEEEAntennaandWirelessProp.Letters,Vol.2,pp.103106,2003.
[V.6]PetitL.,"AntennesreconfigurablesbasedeMEMSRF",Thsededoctorat,Fevrier2007.
[V.7]ParkJY.,WangY.,ItohT.,"A60GHzintegratedantennaarrayforhighspeeddigitalbeamforming
application",2003IEEEMTTSInt.MicrowaveSymp.Dig.,Philadelphia,PA.,pp.16771680,June,2003.
[V.8]ReynoldsS.,FloydB.,PfeifferU.,BeukemaT.,GrzybJ.,HaymesC.,GaucherB.andSoyuerM., "A
silicon60GHzreceiverandtransmitterchipsetforbroadbandcommunications",IEEEJournalofSolidState
Circuits,vol.41,no.12,pp.28202830,Dec.2006.
[V.9]PfeifferU.R.,GrzybJ.,LiuD.,GaucherB.,BeukemaT.,FloydB.A.,andReynoldsS.K., "Achip
scalepackagingtechnologyfor60GHzwirelesschipsets",IEEETrans.onMicrowaveTheoryTech.,vol.54,
no.8,pp.33873397,Aug.2006.
[V.10]GreiserW.,"CoplanarStriplineAntenna",MicrowaveJournal.,vol.19,p.4749.,Oct.1976.
[V.11]NesicA., "Bandwidthandradiationcharacteristicsofprintedslotexcitedbyacoplanarwaveguide",
InternationalConferenceonAntennasandPropagation,pp.404406,1983.
[V.12] RanvierS.,Luxey C.,Staraj R.,Vainikainen P.,IchelnC., "Mutualcouplingreductionforpatch
antennaarray",EUCAP2006,Nice,France,pp481482,2006.
170
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Conclusions et perspectives
Conclusions et perspectives
Le dveloppement de nouveaux usages, l'augmentation du nombre d'utilisateurs, les
besoins croissants en terme de dbit et la monte en frquence imposent aux systmes de
communications sans fil dtre en perptuelle volution. Les contraintes de plus en plus drastiques
sappliquent sur lensemble de la chane de transmission, dont lantenne est un des lments
souvent critique. La seule solution pour relever dans les annes futures ce dfi est d'avoir recours
des antennes 'intelligentes'', capables d'appliquer des techniques de diversit despace, de
polarisation, de frquence, pour sadapter leur environnement lectromagntique. Le
dveloppement de ce nouveau type de systme ncessite des lments actifs fiables, performants et
intgrables.
Les travaux de recherche prsents dans ce manuscrit sont une contribution la conception
et loptimisation dantennes reconfigurables en polarisation ou en directivit base d'lments
actifs: diodes PIN, varactors et MEMS. Pour atteindre ces objectifs, diffrentes voies dinvestigation
ont t suivies : technologiques (MIC, MMIC, MEMS), architecturales (ltude thorique de
coupleurs hybrides quasi-discret a conduit la conception de topologies novatrices dantennes
reconfigurables), en sappuyant sur des outils de simulations spcifiques.
Les deux premiers chapitres ont permis, dune part, de prsenter les principales
caractristiques des antennes en gnral et des antennes actives en particulier, et dautre part, de
proposer un tat de l'art du domaine, ainsi que celui des composants actifs permettant cette
reconfiguration.
Dans le troisime chapitre, nous nous sommes intresss l'tude des diffrents
commutateurs MEMS. Un microcommutateur magntique industriel de la socit Magfusion a t
tudi et caractris. Des performances suprieures ses quivalents semi-conducteur ont t
dmontres jusqu' 6 GHz: pertes d'insertion infrieures 1dB, isolation suprieure 30 dB et
consommation par commutation de 500uJ. Toutefois, les performances tant insuffisantes au-del
de 10 GHz, nous nous sommes intresss la conception de MEMS grce au logiciel commercial
Coventor. A partir d'un MEMS electro-thermique dj existant, nous avons prsent le flot de
conception depuis la caractrisation comportementale jusqu' la simulation lments finis. Enfin,
sur la base du procd industriel de la socit MEMSCAP, deux types de switchs RF srie et
171
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Conclusions et perspectives
parallle ont t conus et raliss. Les mesures donnent une tension d'activation de 35V, et des
performances correctes jusqu' 60 GHz. L'objectif final est d'intgrer sur un mme substrat silicium
l'antenne, les MEMS et l'lectronique de commande associe.
Le quatrime chapitre est consacr ltude de diffrentes architectures d'antennes agiles
en polarisation. Une premire antenne permet de recevoir deux frquences diffrentes des ondes
polarises circulairement. Un coupleur reconfigurable quasi-discret base de diodes varactors a
ensuite t tudi. Il permet de couvrir une bande suprieure 100% tout en maintenant une
adaptation et une isolation suprieures 10 dB. Ce coupleur peut aussi tre utilis comme un
diviseur de puissance commandable puisque le couplage entre ses deux ports de sortie peut varier
de -3,4dB 18dB. En cascadant deux coupleurs quasi-discrets, il est possible d'tendre les
performances du coupleur global. Le systme final peut se reconfigurer sur une bande de 460 %, et
le couplage entre les deux ports de sortie peut ainsi varier entre -30dB et 15dB. Diffrentes
applications bases sur ce coupleur ont par la suite t prsentes. En le connectant une antenne
double alimentation orthogonale, il est possible de modifier le rayonnement entre une
polarisation linaire ou circulaire. La seconde application prsente permet d'effectuer une rotation
lectrique de la polarisation linaire d'une antenne sur un angle de 90.
Enfin, dans le dernier chapitre, nous avons prsent diffrentes solutions pour reconfigurer
le diagramme de rayonnement d'une antenne. Une premire solution propose est base sur les
coupleurs en mode rflexion. Cette mthode permet de rduire le nombre de commutateurs
ncessaires pour modifier dynamiquement les diffrentes phases du rseau dphaseur. Les
rsultats thoriques ont t valids sur un prototype utilisant des diodes PIN comme
commutateurs. En fonction du dpointage ralis, le gain mesur dans laxe prsentait soit un
maximum de 6,2dB, soit un creux de -15dB. Bas sur la sommation de vecteurs orthogonaux, le
deuxime type de dphaseur, que nous avons ralis, utilisait les coupleurs quasi-discrets vus
prcdemment. En cascadant deux coupleurs, il est possible de modifier le dphasage entre les
deux sorties de plus de 360. Ce circuit a t associ un rseau de deux patchs et a permis de
mettre en vidence le dpointage de faisceau. Une solution base sur une antenne principale avec
des lments parasites reconfigurables a aussi t tudie. Enfin, un circuit tout intgr sur
Silicium haute rsistivit a t conu et ralis dans la technologie MetalMUMPS de la socit
MEMSCAP. Le rseau de 5 antennes est aliment par un rseau dphaseur par ligne commute.
Les dphaseurs utilisent les MEMS srie et shunt dcrits au chapitre 4. Toutefois, les drives
importantes constates du process technologique ne nous ont pas permis de valider lensemble de
la structure. Les premiers rsultats sur chaque lment de la structure sont nanmoins trs
172
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Conclusions et perspectives
encourageants.
Les travaux de cette thse ont permis de concevoir et de raliser les premiers
microcommutateurs (MEMS RF) au sein du LEAT. Malgr les problmes de dispersion
technologique, les premiers rsultats sont de bonnes qualits, proches de ltat de lart (pertes
dinsertion infrieures 1 dB, isolation suprieure 20 dB 60 GHz). Coupls des hybrides
quasi-discrets, ils nous ont permis de valider et de dvelopper de nombreuses architectures
dantennes novatrices reconfigurables en polarisation ou en directivit. Certains prototypes ont t
valids en utilisant des diodes PIN ou des varactors. La prochaine tape consisterait intgrer les
nouveaux composants MEMS sur nos systmes reconfigurables pour accrotre les performances
radio-frquences. Grce un partenariat privilgi avec l'universit d'Helsinki, nous allons
pouvoir raliser de nouvelles structures sur leur procd technologique.
173
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
LISTE DES TRAVAUX BIBLIOGRAPHIQUES
Publications dans des revues spcialises avec comit de lecture
1. F. Ferrero, C. Luxey, G. Jacquemod & R. Staraj, Dual-Band circularly polarized
microstrip antenna for satellite aplications, IEEE Antennas and Wireless Propagation
Letters, vol. 4, 2005, p. 13-15
2. F. Ferrero, C. Luxey, R. Staraj, G. Jacquemod, V. Fusco, Compact quasi-lumped hybrid
coupler tunable over a large frequency band, Electronic letters, accept Septembre 2007.
Communications internationales avec actes et comit de lecture
3. F. Ferrero, C. Luxey, G. Jacquemod & R. Staraj, Circularly Polarized Dual-Band
Microstrip Antenna, JINA 04, Nice, 2004, p. 472-473
4. F. Ferrero, C. Luxey, G. Jacquemod & R. Staraj, A Circularly Polarized Dual-Band
Microstrip Antenna, IEEE/ACES ICWCACE, Honolulu, 2005
5. F. Ferrero, C. Luxey, G. Jacquemod, R. Staraj, G. Kossiavas & V. Fusco, Reconfigurable
phase-arrays based on hybrid couplers in reflection mode, Antem 05, Saint-Malo, 2005, p.
244-245
6. S. Ranvier, F. Ferrero, C. Luxey, G. Jacquemod, R. Staraj, C. Icheln & P. Vainikainen,
Integrated MIMO Antenna with Directional Diversity in the 60 GHz Band, SAME 06,
Sophia Antipolis, 2006
7. F. Ferrero, C. Luxey, G. Jacquemod, R. Staraj & V. Fusco, A reconfigurable hybrid
coupler circuit for agile polarisationn antenna, EuCAP, Nice, 2006
8. F. Ferrero, S. Ranvier, C. Icheln, P. Vainikainen, C. Luxey, R. Staraj & G. Jacquemod,
Integrated MM-Wave MIMO Antenna with Directional Diversity using MEMS
Technology, ICECS 06, Nice, 2006, p. 447-450
9. F. Ferrero, C. Luxey, G. Jacquemod, R. Staraj & V. Fusco, Polarisation-Reconfigurable
Patch Antenna, IWAT, Cambridge, 2007, p. 73-76
10.F. Ferrero & G. Jacquemod, A tunable quasi-lumped microstrip coupler and RF
applications, IMS, Honolulu, 2007, p. 1197-1200
11. F. Ferrero, C. Luxey, R. Staraj, G. Jacquemod, V. Fusco, Linearly-Polarized tunable
Antenna, European Conference on Antennas and Propagation (EuCAP 2007), November
2007, Edinburgh, UK
Communications nationales avec actes et comit de lecture
12. F. Ferrero, C. Luxey, G. Jacquemod, R. Staraj, G. Kossiavas & V. Fusco, Antennes
rseaux dphaseurs actifs, JNM 05, Nantes, 2005
13. F. Ferrero, C. Luxey, R. Staraj, G. Jacquemod & V. Fusco, Coupleur reconfigurable pour
antenne diversit de polarisation, JNM 07, Toulouse, 2007
175
t
e
l
-
0
0
4
5
4
6
1
3
,
v
e
r
s
i
o
n
1
-
9
F
e
b
2
0
1
0
Vous aimerez peut-être aussi
- L' INSTALLATION INTERACTIVE: Un laboratoire d’expériences perceptuelles pour le participant-chercheurD'EverandL' INSTALLATION INTERACTIVE: Un laboratoire d’expériences perceptuelles pour le participant-chercheurPas encore d'évaluation
- Sous la réhabilitation, le contrôle: La justice des mineurs au XXIe siècleD'EverandSous la réhabilitation, le contrôle: La justice des mineurs au XXIe sièclePas encore d'évaluation
- These Emmanuel PistonoDocument162 pagesThese Emmanuel Pistonoyoussed88Pas encore d'évaluation
- These JacobDocument214 pagesThese JacobpoooolePas encore d'évaluation
- 2015LIMO0124Document241 pages2015LIMO0124lili loulouPas encore d'évaluation
- TH2014PEST1168 CompleteDocument187 pagesTH2014PEST1168 Completeasma soumaPas encore d'évaluation
- DESAEGHER 2017 ArchivageDocument230 pagesDESAEGHER 2017 ArchivageboooPas encore d'évaluation
- Etude de La Cardiotoxicité Induite Par Les Traitements Anticancéreux Rôle D'epac Dans La Cardiotoxicité Induite Par La Doxorubicine PDFDocument303 pagesEtude de La Cardiotoxicité Induite Par Les Traitements Anticancéreux Rôle D'epac Dans La Cardiotoxicité Induite Par La Doxorubicine PDFhajarPas encore d'évaluation
- Conception Et Réalisation de Filtres Microondes Planaires Accordables Par Varactors Structures Périodiques These - Emmanuel - Pistono2006Document163 pagesConception Et Réalisation de Filtres Microondes Planaires Accordables Par Varactors Structures Périodiques These - Emmanuel - Pistono2006ibanitescuPas encore d'évaluation
- These 3Document156 pagesThese 3EulerPas encore d'évaluation
- Texier Partie 1 Sur 2Document157 pagesTexier Partie 1 Sur 2Azabou MariamPas encore d'évaluation
- COUCHET 2019 ArchivageDocument211 pagesCOUCHET 2019 ArchivageAisaoua BuobouPas encore d'évaluation
- These ElgibariDocument158 pagesThese ElgibarimikefirminoPas encore d'évaluation
- Rôle de La Régulation Stomatique Et de La Capacité de Détoxication Foliaire Dans L'estimation D'un Seuil de Risque À L'ozone Pour La VégétationDocument292 pagesRôle de La Régulation Stomatique Et de La Capacité de Détoxication Foliaire Dans L'estimation D'un Seuil de Risque À L'ozone Pour La VégétationRachid AIT ELAYADPas encore d'évaluation
- VALLEAU Jeremy PDFDocument163 pagesVALLEAU Jeremy PDFCoeur VerouillerPas encore d'évaluation
- 2018LIMO0089Document175 pages2018LIMO0089Hichem NaghmouchiPas encore d'évaluation
- SCD T 2010 0020 ClaudotteDocument226 pagesSCD T 2010 0020 ClaudottesafiotPas encore d'évaluation
- These DRUTDocument246 pagesThese DRUTmimi.sasooPas encore d'évaluation
- These Johan Chaniot 2019Document218 pagesThese Johan Chaniot 2019khadyja.amar68Pas encore d'évaluation
- Cohérence Cardiaque Théorie PolyvagaleDocument260 pagesCohérence Cardiaque Théorie Polyvagalefg55930Pas encore d'évaluation
- These Mahamat Hassan Bechir 2014Document212 pagesThese Mahamat Hassan Bechir 2014djebbourinourddinePas encore d'évaluation
- EncapsulationDocument265 pagesEncapsulationMounia BELAIDPas encore d'évaluation
- These Jean HerissonDocument302 pagesThese Jean Herissontkortiz24Pas encore d'évaluation
- 2009 Benard CDocument266 pages2009 Benard CSèna Bruno AYINONPas encore d'évaluation
- Baillieul MarionDocument259 pagesBaillieul Marionkuzgun cebeciPas encore d'évaluation
- Thèse: Doctorat de L'Université de ToulouseDocument348 pagesThèse: Doctorat de L'Université de ToulouseascopolaminePas encore d'évaluation
- Optical Properties of Point Defects in Hexagonal BDocument139 pagesOptical Properties of Point Defects in Hexagonal BAhamed Al ArifinPas encore d'évaluation
- 2016TOU30080b PDFDocument227 pages2016TOU30080b PDFmyskyshepherdPas encore d'évaluation
- Marconnet C. Influence de L'adhésion Et de L'activité EnzymatiqueDocument329 pagesMarconnet C. Influence de L'adhésion Et de L'activité Enzymatiqueniebelungen100% (1)
- These Gaelle BalineauDocument374 pagesThese Gaelle BalineaumalumaPas encore d'évaluation
- ThesegregoireDocument560 pagesThesegregoiremarthegeyPas encore d'évaluation
- These Julien PayenDocument258 pagesThese Julien Payenyounes zekkourPas encore d'évaluation
- Electro TecDocument255 pagesElectro TecHouceme TALHIPas encore d'évaluation
- Membranes Électrolytes À Porteurs de Charge Li+: To Cite This VersionDocument203 pagesMembranes Électrolytes À Porteurs de Charge Li+: To Cite This VersionMohamed AIT KASSIPas encore d'évaluation
- Memoire Doctorat BressyDocument332 pagesMemoire Doctorat BressyJalal KePas encore d'évaluation
- 2016pa066310 PDFDocument181 pages2016pa066310 PDFKhurshed Alam IndiaPas encore d'évaluation
- These A JeanDocument285 pagesThese A JeanPerezPas encore d'évaluation
- Si 1Document670 pagesSi 1Dina LahlaliPas encore d'évaluation
- These ImpressionDocument159 pagesThese ImpressionDiwa BenmansourPas encore d'évaluation
- Tran 2010 PDFDocument182 pagesTran 2010 PDFFatima EssaiPas encore d'évaluation
- TheseDocument408 pagesThesehabibamouriPas encore d'évaluation
- These Audrey NEAU 2009 PDFDocument223 pagesThese Audrey NEAU 2009 PDFEmira ZrelliPas encore d'évaluation
- Apprentissage Actif Sous Contraite de Budget en Robotique Et en Neurosciences Computationnelles (PDFDrive)Document121 pagesApprentissage Actif Sous Contraite de Budget en Robotique Et en Neurosciences Computationnelles (PDFDrive)diné deconPas encore d'évaluation
- PONS 2016 ArchivageDocument268 pagesPONS 2016 Archivagelabo estPas encore d'évaluation
- Lacampagne Localisation Et Caractérisation Des Tannins PDFDocument293 pagesLacampagne Localisation Et Caractérisation Des Tannins PDFNaouel BoudPas encore d'évaluation
- PTENDocument218 pagesPTENAmina AminaPas encore d'évaluation
- Thèse PerpignanDocument269 pagesThèse PerpignanFuks GadPas encore d'évaluation
- These Zarrad LIRMM FinalDocument158 pagesThese Zarrad LIRMM FinalFares MentseurPas encore d'évaluation
- LAHJIRI 2020 ArchivageDocument307 pagesLAHJIRI 2020 ArchivageAichaa DramePas encore d'évaluation
- 284 - Enscm - 2012 - Nguemtchouin Mbouga PDFDocument293 pages284 - Enscm - 2012 - Nguemtchouin Mbouga PDFDjamel AnteurPas encore d'évaluation
- 2016 These D - AmicoDocument205 pages2016 These D - Amicobrahim chalhoubPas encore d'évaluation
- Ciment2 PDFDocument294 pagesCiment2 PDFSanaPas encore d'évaluation
- RemerciementsDocument4 pagesRemerciementsRissay El KhattabiPas encore d'évaluation
- Ddoc T 2012 0273 Fallet FidryDocument205 pagesDdoc T 2012 0273 Fallet FidrymapiyasserPas encore d'évaluation
- 2020TOU30293Document190 pages2020TOU30293Monir NoniPas encore d'évaluation
- 2020TOU30293Document190 pages2020TOU30293Monir NoniPas encore d'évaluation
- Enscm 2022 CuminetDocument242 pagesEnscm 2022 CuminetmicmacPas encore d'évaluation
- Le Tritium de L'ecosystème À L'hommeDocument276 pagesLe Tritium de L'ecosystème À L'hommeLe GoffPas encore d'évaluation
- Holliday Dawid 2006Document143 pagesHolliday Dawid 2006MERi BPas encore d'évaluation
- Caracterisation de L'evolution de L'etat de Biodegradation Des Massifs de DéchetsDocument351 pagesCaracterisation de L'evolution de L'etat de Biodegradation Des Massifs de DéchetsLalouettePas encore d'évaluation
- Ecoute 2019 03 Franco-AllemandDocument1 pageEcoute 2019 03 Franco-AllemandSandrine GallardPas encore d'évaluation
- Inconscience Chez Freud PDFDocument5 pagesInconscience Chez Freud PDFSandrine GallardPas encore d'évaluation
- Le Poeme MagicienDocument52 pagesLe Poeme MagicienSandrine GallardPas encore d'évaluation
- Conformal MappingDocument34 pagesConformal MappingSandrine GallardPas encore d'évaluation
- Pourquoi LireDocument192 pagesPourquoi LireSandrine GallardPas encore d'évaluation
- ArduinoDocument117 pagesArduinoGenie Mbaye100% (2)
- 16 17 Examen BD Smi Lpii CorrectionDocument6 pages16 17 Examen BD Smi Lpii Correctionadilcharahil2000Pas encore d'évaluation
- 4-Les AnnuitésDocument17 pages4-Les AnnuitésMarcelo BouhbaPas encore d'évaluation
- Cours Theorie Du Controle3Document38 pagesCours Theorie Du Controle3Abderrahim El amraniPas encore d'évaluation
- 2022 NelleCaledo SI J2 Exo3 Sujet PAC 10ptsDocument3 pages2022 NelleCaledo SI J2 Exo3 Sujet PAC 10ptsgabinPas encore d'évaluation
- Automatique Niveau1Document77 pagesAutomatique Niveau1ssssPas encore d'évaluation
- DS1b PCDocument3 pagesDS1b PCfrancoisbPas encore d'évaluation
- PL - Chap I - Copie PDFDocument5 pagesPL - Chap I - Copie PDFmme tPas encore d'évaluation
- RCI BEPC 2016 Zone3 Mathematiques PDFDocument2 pagesRCI BEPC 2016 Zone3 Mathematiques PDFNET MONEYPas encore d'évaluation
- Examen Blanc 2Document4 pagesExamen Blanc 2AlcalinaPhysicsPas encore d'évaluation
- Mise en Forme Des Polymeres Approche Thermomecanique de La Plasturgie 4 Ed SommaireDocument36 pagesMise en Forme Des Polymeres Approche Thermomecanique de La Plasturgie 4 Ed Sommairemostafa oubihiPas encore d'évaluation
- IntroductionDocument8 pagesIntroductionMezine SohaibPas encore d'évaluation
- TD PharmacométrieDocument8 pagesTD PharmacométrieSoumaya HizaouiPas encore d'évaluation
- Notice FH Alcatel 9400uxDocument63 pagesNotice FH Alcatel 9400uxMichelchaPas encore d'évaluation
- Guide Reporting Tableaux de Bord Microsoft Dynamics CRM 2013Document78 pagesGuide Reporting Tableaux de Bord Microsoft Dynamics CRM 2013youssef MCHPas encore d'évaluation
- Canevas LicenceDocument8 pagesCanevas LicenceKassi ZidanePas encore d'évaluation
- TD1 Algo CDocument1 pageTD1 Algo CAbdessattar AbdouPas encore d'évaluation
- Pages From ASIRI-Recommandations-2012 - CompressedDocument190 pagesPages From ASIRI-Recommandations-2012 - CompressedYaseen AlAjmi CompanyPas encore d'évaluation
- S61 - ENPU Synthese CVSDocument9 pagesS61 - ENPU Synthese CVSBahija KOUHAILPas encore d'évaluation
- Cours Materiaux Isolants - DocDocument35 pagesCours Materiaux Isolants - DocJihen Rf100% (1)
- QCM Corro Architecture - 123325Document6 pagesQCM Corro Architecture - 123325Grâce AudreyPas encore d'évaluation
- Chap2. Analyse Des Causes de DefaillanceDocument6 pagesChap2. Analyse Des Causes de DefaillanceWijdanePas encore d'évaluation
- Corrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineDocument5 pagesCorrigé Type Du Modue Les Écoulements en Charge Master 1 Hydraulique UrbaineMimouna TabetPas encore d'évaluation
- Guide D'administration TWSDocument413 pagesGuide D'administration TWSDenazareth JesusPas encore d'évaluation
- TD Thermo SERIE2 AIT HOUDocument2 pagesTD Thermo SERIE2 AIT HOUOum FirasPas encore d'évaluation
- Cours 6 Moteurs A Combustion InternesDocument7 pagesCours 6 Moteurs A Combustion Internesahmed ahmadPas encore d'évaluation
- Exercice Photochimie CorrigéDocument12 pagesExercice Photochimie CorrigéchemputicPas encore d'évaluation
- Chap1 TP1 Python en Interactif (1) GRGGDocument6 pagesChap1 TP1 Python en Interactif (1) GRGGMathis .LPas encore d'évaluation
- DS07 EngelDocument4 pagesDS07 EngelbhffuhPas encore d'évaluation
- DMbac STI2 DDocument2 pagesDMbac STI2 DzeriPas encore d'évaluation
- Correction Activité1Document9 pagesCorrection Activité1Dany ObeidPas encore d'évaluation