Vous aimerez peut-être aussi
- ImportantDocument12 pagesImportantMohammed AfkirPas encore d'évaluation
- Calcul CareneDocument2 pagesCalcul Careneمحمد الأمين شرفاويPas encore d'évaluation
- HA0504 CorrigeDocument3 pagesHA0504 CorrigeYanick ND (Yann)Pas encore d'évaluation
- Licence L3-TD-HYDRO-5Document3 pagesLicence L3-TD-HYDRO-5jamesPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercices Corriges 1 PDFDocument12 pagesExercices Corriges 1 PDFDounia El100% (1)
- Calcul Du Voile PériphériqueDocument8 pagesCalcul Du Voile Périphériquemadjid tighiltPas encore d'évaluation
- TP1 2013 Exo1Document9 pagesTP1 2013 Exo1Anonymous XNijip100% (1)
- Guide BP Chap7Document34 pagesGuide BP Chap7kakem61Pas encore d'évaluation
- CH10 Calculduportiquetraverse PDFDocument43 pagesCH10 Calculduportiquetraverse PDFCVPas encore d'évaluation
- Chapitre 15 Étude de La Culée RéparéeDocument28 pagesChapitre 15 Étude de La Culée RéparéeConfusTrefle0% (1)
- TD5 Flexion (1)Document12 pagesTD5 Flexion (1)Malak BouhadidaPas encore d'évaluation
- Mecanique TrebuchetDocument8 pagesMecanique Trebuchetidriss.ammara770Pas encore d'évaluation
- Corrige 6Document7 pagesCorrige 6Simo Jamaai50% (2)
- Calcul de l'Energie d'accostageDocument6 pagesCalcul de l'Energie d'accostageCLEMENTPas encore d'évaluation
- Cours Sur Hydraudynamique NavaleDocument57 pagesCours Sur Hydraudynamique NavaleIki RaulPas encore d'évaluation
- BEMChap1 (Piston 3 Axe)Document11 pagesBEMChap1 (Piston 3 Axe)HTR WAS HEREPas encore d'évaluation
- Chapitre 5Document36 pagesChapitre 5Walid MelikPas encore d'évaluation
- Attinage PositionnableDocument10 pagesAttinage PositionnableUnica Figlia KenzaPas encore d'évaluation
- 15 53 LemaireDocument8 pages15 53 LemairekadaPas encore d'évaluation
- Note de Calcul Du Coffrage Du Voile PDFDocument10 pagesNote de Calcul Du Coffrage Du Voile PDFMohamed EL Guennouni Rich100% (1)
- Corrige Automatique 2000 ADocument28 pagesCorrige Automatique 2000 ADjilani Hassan GadittoPas encore d'évaluation
- TP ResistanceDocument11 pagesTP ResistancehamzaPas encore d'évaluation
- Données DalotDocument13 pagesDonnées DalotLionel TebonPas encore d'évaluation
- Calcul Des PannesssssDocument17 pagesCalcul Des Pannesssssamal100% (1)
- 24919-Note de Calcul de Voile de SoutenementDocument6 pages24919-Note de Calcul de Voile de SoutenementNacer IzriPas encore d'évaluation
- M''BDocument17 pagesM''BMourad GcvPas encore d'évaluation
- Miniprojet Poutre Au Vent PDFDocument4 pagesMiniprojet Poutre Au Vent PDFAbdel Monaim MaghraouiPas encore d'évaluation
- EFS1 TypeDocument6 pagesEFS1 TypeJwnwiw HebwoebPas encore d'évaluation
- Rapport Final Cherrabi (À Imprimer)Document29 pagesRapport Final Cherrabi (À Imprimer)hasna zahriPas encore d'évaluation
- PontDocument12 pagesPontMohamed Tabet100% (2)
- TP 03Document6 pagesTP 03Męlį SsæPas encore d'évaluation
- Rapport-Final-Projet-Geotéchnique 1122158551Document13 pagesRapport-Final-Projet-Geotéchnique 1122158551SimoZorganePas encore d'évaluation
- Etude de La PileDocument17 pagesEtude de La PileFousma SmailPas encore d'évaluation
- Chapitre 5Document24 pagesChapitre 5karolina the beautyPas encore d'évaluation
- Chapitre 04etude de La PiscineDocument8 pagesChapitre 04etude de La PiscineDida DidoPas encore d'évaluation
- CH 4 Ferraillage Des Éléments SecondairesDocument30 pagesCH 4 Ferraillage Des Éléments SecondairesMalakChichiGuezouliPas encore d'évaluation
- Cours de RDM 1 - Rapport RDMDocument39 pagesCours de RDM 1 - Rapport RDMThony LikengPas encore d'évaluation
- Calcul VoileDocument5 pagesCalcul Voileabdo100% (2)
- Note de Calcul Des Dalots: 2. Normes Et MatériauxDocument3 pagesNote de Calcul Des Dalots: 2. Normes Et MatériauxArfaoui Aymen100% (1)
- Baccalaur at Technologique 2022 - STL - Physique Chimie Et Math Matiques 114257 - 0Document22 pagesBaccalaur at Technologique 2022 - STL - Physique Chimie Et Math Matiques 114257 - 0admin efbPas encore d'évaluation
- Colle c1Document9 pagesColle c1xzi0515Pas encore d'évaluation
- Étude D - Un Batiment R+2Document57 pagesÉtude D - Un Batiment R+2Wandile Simelane94% (33)
- Mini Projet Fond at I OnDocument6 pagesMini Projet Fond at I OnAbdelhamid Dehayni AL Abdali50% (2)
- Mines Ponts PSI 2014 Sujet PDFDocument12 pagesMines Ponts PSI 2014 Sujet PDFImane MadouimPas encore d'évaluation
- TPN1Document12 pagesTPN1Nina NinaPas encore d'évaluation
- Mur SoutDocument5 pagesMur SoutWalid MghazliPas encore d'évaluation
- VOILESDocument8 pagesVOILESlilia RabhiPas encore d'évaluation
- Baccalaur at G N Ral 2023 - Sciences de L Ing Nieur - Jour 2 154814Document24 pagesBaccalaur at G N Ral 2023 - Sciences de L Ing Nieur - Jour 2 154814Yassine BenPas encore d'évaluation
- Exercice 02Document3 pagesExercice 02Omar OubahaPas encore d'évaluation
- BA Devoir 2 Exo 4Document28 pagesBA Devoir 2 Exo 4LEIS DJIFACKPas encore d'évaluation
- 10 Chapitre Ferraillages Des VoilesDocument20 pages10 Chapitre Ferraillages Des Voileswanado8787% (15)
- Presentation 2.2Document27 pagesPresentation 2.2Ayoub BenPas encore d'évaluation
- Examen Ge1 2014 2015Document2 pagesExamen Ge1 2014 2015hdjs5Pas encore d'évaluation
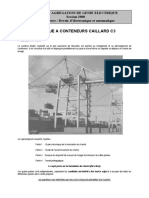
- BAC Etude-des-Constructions 2008 STIELECTECH PDFDocument29 pagesBAC Etude-des-Constructions 2008 STIELECTECH PDFJawher SalemPas encore d'évaluation
- Brevet Blanc Maths 2023Document6 pagesBrevet Blanc Maths 2023alloulnolanPas encore d'évaluation
- 4-2 Cours S5Document23 pages4-2 Cours S5chaouiPas encore d'évaluation
- Python TP2Document2 pagesPython TP2Alassane SangarePas encore d'évaluation
- 1-Séance 1Document4 pages1-Séance 1slamachaima2003Pas encore d'évaluation
- PFSDocument14 pagesPFShamidullah75Pas encore d'évaluation
- Mathematiques Premiere c Prepa Probatoire 2022Document2 pagesMathematiques Premiere c Prepa Probatoire 2022ayikpeaba8Pas encore d'évaluation
- Compte Rendu de TP de Modulation NumériqueDocument5 pagesCompte Rendu de TP de Modulation Numériqueanon_98622714775% (4)
- M09-Initiation Au DAO-BTP-TDBDocument68 pagesM09-Initiation Au DAO-BTP-TDBDriss BenomarPas encore d'évaluation
- Chaitre VI Les Principaux Théorèmes de La Géométrie EuclidienneDocument16 pagesChaitre VI Les Principaux Théorèmes de La Géométrie EuclidienneAyyoub BettaharPas encore d'évaluation
- 16 Cauchy LinéaireDocument1 page16 Cauchy LinéaireRamanujan SrinivasaPas encore d'évaluation
- ChapII ProducteurDocument44 pagesChapII ProducteurÀbdèrràhim AboussemdaiPas encore d'évaluation
- NOMBR RATIONNELproduit QoutionDocument6 pagesNOMBR RATIONNELproduit Qoutionessalmi mohamedPas encore d'évaluation
- Cours 1 Les Nombres Décimaux RelatifsDocument2 pagesCours 1 Les Nombres Décimaux RelatifsSimoMonkad50% (2)
- La Linguistique Analogique-2015Document9 pagesLa Linguistique Analogique-2015Francivaldo LourençoPas encore d'évaluation
- Article 16Document13 pagesArticle 16inalPas encore d'évaluation
- Metro 4Document12 pagesMetro 4Ikram RiguetPas encore d'évaluation
- Le Secret de JOE Celll (Traduc V2)Document23 pagesLe Secret de JOE Celll (Traduc V2)api-26235400100% (2)
- Binaire Et HexadécimalDocument16 pagesBinaire Et HexadécimalMinoucha LoulaPas encore d'évaluation
- Ménard Lecture The Pressuremeter Test: Expanding Its UseDocument20 pagesMénard Lecture The Pressuremeter Test: Expanding Its Usebiles1234Pas encore d'évaluation
- TS DM7 CorrigéDocument3 pagesTS DM7 Corrigétristid2Pas encore d'évaluation
- ds2 3emeDocument1 pageds2 3emedarknesss34Pas encore d'évaluation
- Cours Algèbre 3 (Chapitre 1 & 2)Document35 pagesCours Algèbre 3 (Chapitre 1 & 2)yassirclimePas encore d'évaluation
- TP-Constante de Torsion PDFDocument2 pagesTP-Constante de Torsion PDFRodrigue TchoffoPas encore d'évaluation
- QCM Microéconomie s1Document4 pagesQCM Microéconomie s1O zPas encore d'évaluation
- CR Et Solution Chap1 GuendaDocument116 pagesCR Et Solution Chap1 GuendaManel Mh100% (1)
- 2020 Ecricome E Gaunard CorDocument13 pages2020 Ecricome E Gaunard Cormitul KamalPas encore d'évaluation
- Travaux Dirigés 1 Cinématique CorrDocument6 pagesTravaux Dirigés 1 Cinématique CorrAmal FatouhPas encore d'évaluation
- Du Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfD'EverandDu Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfPas encore d'évaluation