Vous aimerez peut-être aussi
- Bien débuter en programmation: Formation professionnelleD'EverandBien débuter en programmation: Formation professionnellePas encore d'évaluation
- Cours Archi Ing-Inf2Document90 pagesCours Archi Ing-Inf2Anis MezniPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Cours TICDocument129 pagesCours TICemna chaibiPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Linux - 1Document70 pagesLinux - 1fatimaezzahra elhoubriPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- O2I DocumentDocument20 pagesO2I DocumentDi-Enilson ÉtiennePas encore d'évaluation
- Vision Industrielle: Permettre aux ordinateurs de dériver des informations significatives à partir d'images numériques, de vidéos et d'entrées visuellesD'EverandVision Industrielle: Permettre aux ordinateurs de dériver des informations significatives à partir d'images numériques, de vidéos et d'entrées visuellesPas encore d'évaluation
- Organisation ENITDocument157 pagesOrganisation ENITFaten YahiaouiPas encore d'évaluation
- Informatique de BaseDocument52 pagesInformatique de BaseHiba HBPas encore d'évaluation
- Ch1 ArchitectureDesOrdinateursDocument29 pagesCh1 ArchitectureDesOrdinateursYouness BelkhiriPas encore d'évaluation
- ArchitDocument61 pagesArchitghassenPas encore d'évaluation
- Cours 4 HistoriqueDocument33 pagesCours 4 Historiqueramzi benahmediPas encore d'évaluation
- ATO - Chap - 0 - Historique de L'ordinateurDocument20 pagesATO - Chap - 0 - Historique de L'ordinateurRigotonic le Bezou (sergio poloo le mondain)Pas encore d'évaluation
- 1 - Architecture ENSABM Séance1Document65 pages1 - Architecture ENSABM Séance1youghattiPas encore d'évaluation
- Cours-Microproc 2018Document192 pagesCours-Microproc 2018Badr Eddine EL HAGAOUIPas encore d'évaluation
- Architecture Et Segmentation Mémoire Du 80286Document39 pagesArchitecture Et Segmentation Mémoire Du 80286the dawgPas encore d'évaluation
- Cour AdnanDocument217 pagesCour AdnanBoualem MestafaPas encore d'évaluation
- AOA Chap1 P1Document61 pagesAOA Chap1 P1ekram ekramPas encore d'évaluation
- Assembleur PDFDocument189 pagesAssembleur PDFSalihabensalaPas encore d'évaluation
- Réalisé Par: M. MERCHICHI Mohammed: E-MailDocument29 pagesRéalisé Par: M. MERCHICHI Mohammed: E-Mailmohammed merchichiPas encore d'évaluation
- Cours Architecture CompletDocument176 pagesCours Architecture CompletAya MkPas encore d'évaluation
- Cours OS - CH1Document73 pagesCours OS - CH1Oumaima ZiatPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 47Document31 pagesCours Microcontrôleur Microprocesseur 47LAHOUSSINE ELMAHNIPas encore d'évaluation
- 01 - Histoire Des OrdinateursDocument30 pages01 - Histoire Des OrdinateursAdel McleodPas encore d'évaluation
- Cours 01Document19 pagesCours 01asalmadPas encore d'évaluation
- 10-Cours Archi RappelsDocument381 pages10-Cours Archi RappelsAyoub Oukhalek100% (1)
- Résumé Module Architecture Des Ordinateur (AO)Document17 pagesRésumé Module Architecture Des Ordinateur (AO)Amina AimeurPas encore d'évaluation
- b1 Isi RT Architecture 2019 Copy Syllabus - CopieDocument58 pagesb1 Isi RT Architecture 2019 Copy Syllabus - Copiedaniel tshipamba lubadiPas encore d'évaluation
- Partie I - Systemes Informatiques Et ReseauxDocument46 pagesPartie I - Systemes Informatiques Et ReseauxHachem EmptyPas encore d'évaluation
- Archi CM01Document37 pagesArchi CM01Àźwű ŠāģhřűPas encore d'évaluation
- WWW - Cours Gratuit - Com Id 5297Document90 pagesWWW - Cours Gratuit - Com Id 5297Madjilem NayamPas encore d'évaluation
- Cours - Architecture ch1Document45 pagesCours - Architecture ch1Hoody 05Pas encore d'évaluation
- Cours Architecture Des Ordinateurs PDFDocument39 pagesCours Architecture Des Ordinateurs PDFMehdi Ait EL KadiPas encore d'évaluation
- Notes Cours 1 ELTDocument20 pagesNotes Cours 1 ELTwe 10Pas encore d'évaluation
- Cours Arch v2Document84 pagesCours Arch v2koussayounePas encore d'évaluation
- AO Chapitre 1Document69 pagesAO Chapitre 1Aoubada FlayPas encore d'évaluation
- Historique Des OrdinateursDocument12 pagesHistorique Des Ordinateursmouhamed ben attayaPas encore d'évaluation
- Introduction Au ProcesseursDocument24 pagesIntroduction Au ProcesseursOliver TwistePas encore d'évaluation
- Cours ArcDocument25 pagesCours ArcAbdellatif Er-rabaiPas encore d'évaluation
- Chapitre 4 Historique-Architecture-Generale2020Document49 pagesChapitre 4 Historique-Architecture-Generale2020HAMZA EZZHAR EL IDRISSIPas encore d'évaluation
- PROG S1 Architecture Et Maintenance Des OrdinateursDocument89 pagesPROG S1 Architecture Et Maintenance Des OrdinateursjudrelgnondabekaPas encore d'évaluation
- Architecture de Lordi Net-311 Chap 1Document14 pagesArchitecture de Lordi Net-311 Chap 1stanislas nabelewaPas encore d'évaluation
- Architecture Des Ordi PDFDocument87 pagesArchitecture Des Ordi PDFCouro SowPas encore d'évaluation
- Archi XXid 006Document88 pagesArchi XXid 006Samira El MargaePas encore d'évaluation
- PrincipeDocument11 pagesPrincipeFuGAZY BanG'SPas encore d'évaluation
- Nsipt2 ch1 p1 2324 EnonceDocument6 pagesNsipt2 ch1 p1 2324 EnonceNagore RiveroPas encore d'évaluation
- 1 Cours Info Indus Partie1Document88 pages1 Cours Info Indus Partie1Mourad HoulPas encore d'évaluation
- Chapitre 01: Structure D'un Système de Commande NumériqueDocument23 pagesChapitre 01: Structure D'un Système de Commande NumériqueAdem TayebPas encore d'évaluation
- Chap 1Document5 pagesChap 1Smati DjamelPas encore d'évaluation
- ch-1Document9 pagesch-1taniam.grfPas encore d'évaluation
- 01 - Historique de L'informatique PDFDocument29 pages01 - Historique de L'informatique PDFraj100% (1)
- INTRODUCTION AUX SYSTÈMES D EXPLOITATION. Pr. Hajar IGUERDocument72 pagesINTRODUCTION AUX SYSTÈMES D EXPLOITATION. Pr. Hajar IGUERjawad iounoussePas encore d'évaluation
- PremiereDocument269 pagesPremieretravisdagouPas encore d'évaluation
- Cours Architecture Contractee-EtudiantsDocument76 pagesCours Architecture Contractee-EtudiantsIssa CissePas encore d'évaluation
- Arch & SE Slides 1-42Document42 pagesArch & SE Slides 1-42lourassi raniaPas encore d'évaluation
- Cours1 ADODocument23 pagesCours1 ADOkarimslayer7Pas encore d'évaluation
- Chap 1 ArchiDocument47 pagesChap 1 ArchiBilal adghirPas encore d'évaluation
- Architecture Ordinateur Seance 1Document15 pagesArchitecture Ordinateur Seance 1Lorvens PhotographyPas encore d'évaluation
- Eaton 5SC Lineinteractive Onduleur 500-3000VA Ficheproduit FRDocument2 pagesEaton 5SC Lineinteractive Onduleur 500-3000VA Ficheproduit FRkiokiopaPas encore d'évaluation
- CHAPITRE IV Archi Syst. ProgrammésDocument40 pagesCHAPITRE IV Archi Syst. ProgrammésTimble PuteurPas encore d'évaluation
- Cours BTS Puissance ElectromecaDocument11 pagesCours BTS Puissance ElectromecaAmadou SARRPas encore d'évaluation
- Long Term Evolution (LTE) (4G) : TitreDocument18 pagesLong Term Evolution (LTE) (4G) : TitreCoeur Verouiller0% (1)
- Liste Et Brochage ConnecteursDocument10 pagesListe Et Brochage Connecteursleclick42Pas encore d'évaluation
- Moog D638 Series Digital Valves FRDocument0 pageMoog D638 Series Digital Valves FRnabil160874Pas encore d'évaluation
- Cours 7 CpuDocument90 pagesCours 7 CpuSandra BouPas encore d'évaluation
- Cours API L3Document46 pagesCours API L3Badiel MarcPas encore d'évaluation
- UFS Manuel en FrançaisDocument33 pagesUFS Manuel en FrançaisMohan RajPas encore d'évaluation
- Tutoriel HandbrakeDocument26 pagesTutoriel HandbrakeMimosa74Pas encore d'évaluation
- Les Instructions de Branchement Réalisé Par: Abdelli OuailDocument5 pagesLes Instructions de Branchement Réalisé Par: Abdelli OuailHoucine AbdelliPas encore d'évaluation
- RAM (Random Access Memory) : Les Mémoires Vives (RAM)Document8 pagesRAM (Random Access Memory) : Les Mémoires Vives (RAM)dettlaff xxxPas encore d'évaluation
- Transformate UrsDocument26 pagesTransformate UrsJustin SmithPas encore d'évaluation
- FT CVMDocument2 pagesFT CVMMohamed ElbanadiPas encore d'évaluation
- LoRa Et LoRaWan de La Théorie À La Pratique PDFDocument83 pagesLoRa Et LoRaWan de La Théorie À La Pratique PDFYynn FerdinandPas encore d'évaluation
- Transmission de L'informationDocument19 pagesTransmission de L'informationOthman NchifaPas encore d'évaluation
- Exposé IGBTDocument8 pagesExposé IGBTIlhem Fares100% (1)
- La DomotiqueDocument18 pagesLa Domotiquemed smiPas encore d'évaluation
- VX400s LED Display Controller User ManualDocument33 pagesVX400s LED Display Controller User Manualroland “RolanDelmas” delmasPas encore d'évaluation
- Cours Transmission Par SatelliteDocument27 pagesCours Transmission Par Satellitec68gw899fn100% (1)
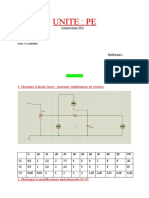
- Unite: Pe: 1. Montage À Diode Zener: Montage Stabilisateur de TensionDocument4 pagesUnite: Pe: 1. Montage À Diode Zener: Montage Stabilisateur de Tensiondouha kchPas encore d'évaluation
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséJIHENE GHAOUIPas encore d'évaluation
- PDF PDFDocument74 pagesPDF PDFMoussa YameogoPas encore d'évaluation
- Plaquette MX482 FR BDDocument2 pagesPlaquette MX482 FR BDmanskebe6121Pas encore d'évaluation
- Principe de La Conversion Analogique Numérique PDFDocument40 pagesPrincipe de La Conversion Analogique Numérique PDFnardjes merzouguiPas encore d'évaluation
- Cours Redressement Simple Et Double AlternanceDocument6 pagesCours Redressement Simple Et Double AlternanceAmani AmounaPas encore d'évaluation
- Chapitre 5 L'amplificateur Opérationnel Et Ses Applications PratiquesDocument1 pageChapitre 5 L'amplificateur Opérationnel Et Ses Applications PratiquesBushraPas encore d'évaluation
- Réseaux CellulairesDocument66 pagesRéseaux CellulairesRaïssa TCHIBOZOPas encore d'évaluation
- TransistorsDocument11 pagesTransistorsMohamed SeyidPas encore d'évaluation
- Chapitre 05Document40 pagesChapitre 05Sim BtbPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Forex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.D'EverandForex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.Évaluation : 4 sur 5 étoiles4/5 (1)