Vous aimerez peut-être aussi
- Chapitre 6 - FlexionDocument14 pagesChapitre 6 - FlexionsalemPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- MMC 1 CorrigeDocument3 pagesMMC 1 CorrigeAmine Hadri100% (1)
- RDM Cours° EsbtpDocument66 pagesRDM Cours° EsbtpKouadio Kouadio SéverinPas encore d'évaluation
- Cours Mecanique RDM BTSDocument29 pagesCours Mecanique RDM BTSAbdelwahad Saghrouchni100% (1)
- Contrôle RDM 06-05-2022Document5 pagesContrôle RDM 06-05-2022Laguchori BouchaibPas encore d'évaluation
- Travail Et Puissance D Une Force Cours 1 4Document5 pagesTravail Et Puissance D Une Force Cours 1 4kokakolaPas encore d'évaluation
- Chapitre 4 RDMDocument14 pagesChapitre 4 RDMRABIE BENTAIEBPas encore d'évaluation
- Les Coupes VerticalesDocument6 pagesLes Coupes VerticalesYvan DoulourouPas encore d'évaluation
- Chapitre Ii Les Efforts InternesDocument27 pagesChapitre Ii Les Efforts InternesAYADI IMEDPas encore d'évaluation
- RDM CH1 Rappels de StatiqueDocument23 pagesRDM CH1 Rappels de Statiquesamar100% (1)
- Cours MEF ENISo-2020-2021Document60 pagesCours MEF ENISo-2020-2021Hassine TarekPas encore d'évaluation
- Méca 2nd F4 - 1 - 2018 2019 - Chapitre I Leçon 2 Rappels Mathématiques Et Physiques - Trigonométrie PDFDocument5 pagesMéca 2nd F4 - 1 - 2018 2019 - Chapitre I Leçon 2 Rappels Mathématiques Et Physiques - Trigonométrie PDFbesandPas encore d'évaluation
- CORRECTION EMI 1ère GC Statique Appliquée Contrôle No.1 202-2021Document4 pagesCORRECTION EMI 1ère GC Statique Appliquée Contrôle No.1 202-2021Ali LagrainiPas encore d'évaluation
- Beton Arme Cours PDFDocument204 pagesBeton Arme Cours PDFNassim ChaabiPas encore d'évaluation
- Définitions Et Principes Fondamentaux de La RDMDocument17 pagesDéfinitions Et Principes Fondamentaux de La RDMVal JlPas encore d'évaluation
- App 107 03 EnonceDocument3 pagesApp 107 03 EnonceMeryem EL ADEKPas encore d'évaluation
- Liaisons Mécaniques - Cours Première STI GCDocument8 pagesLiaisons Mécaniques - Cours Première STI GCPaulochon100% (7)
- Caractéristiques GéométriquesDocument29 pagesCaractéristiques Géométriquesaalae ElbakkaliPas encore d'évaluation
- Cours-2-Caractéristiques Géométriques Des Sections PlanesDocument6 pagesCours-2-Caractéristiques Géométriques Des Sections Planesfz bfsPas encore d'évaluation
- Cours de Beton Armé 2021 - Partie 1Document54 pagesCours de Beton Armé 2021 - Partie 1RAMDE Théodore100% (1)
- Devoir Libre Calcul de StructureDocument5 pagesDevoir Libre Calcul de StructureSanaaPas encore d'évaluation
- Ex Ef Souplesse Poutre EncastreeDocument3 pagesEx Ef Souplesse Poutre EncastreebousmailPas encore d'évaluation
- Chapitre 5 Ba TractionDocument6 pagesChapitre 5 Ba TractionmtssofienePas encore d'évaluation
- TD Sur Les TrellisDocument8 pagesTD Sur Les TrellisLucky BullierPas encore d'évaluation
- TD Statique PlaneDocument8 pagesTD Statique Planeyoussaf assouliPas encore d'évaluation
- Cours D'exploitation Pf4-Ba-kingue Elame ClotaireDocument40 pagesCours D'exploitation Pf4-Ba-kingue Elame ClotaireNKWENTI FLAVIOUS TANUE100% (1)
- Généralités EscaliersDocument4 pagesGénéralités EscaliersLalouani Bounab100% (1)
- Effort Tranchant - CopieDocument7 pagesEffort Tranchant - CopieAnonymous LNStoL34Pas encore d'évaluation
- Dessin Maco Cap 2020Document3 pagesDessin Maco Cap 2020Ahmed Said NgamliyaPas encore d'évaluation
- Géotechnique Cours Et Exercices Résolus PDF 10Document1 pageGéotechnique Cours Et Exercices Résolus PDF 10christarieldadyPas encore d'évaluation
- Pre Dimensionnement Des Elements de Structure Poteaux Et Poutres PDFDocument5 pagesPre Dimensionnement Des Elements de Structure Poteaux Et Poutres PDFOnanena FaldiPas encore d'évaluation
- Devoir en Mécanique Des Milieux Continus 12 PDFDocument8 pagesDevoir en Mécanique Des Milieux Continus 12 PDFlinaPas encore d'évaluation
- 2-Le Beton Arme Aux Etats LimitesDocument1 page2-Le Beton Arme Aux Etats LimitesRafik Rdhaounia100% (1)
- Labo - PreF4-4e SéquenceDocument2 pagesLabo - PreF4-4e SéquenceKévinPas encore d'évaluation
- Chapitre III-Flexion Simple - BoisDocument29 pagesChapitre III-Flexion Simple - BoisCoumba thiawPas encore d'évaluation
- Correction Volumes Calcul 4ème Exercices CorrigésDocument1 pageCorrection Volumes Calcul 4ème Exercices CorrigésOlfa ChakrounPas encore d'évaluation
- Cours5 Dyn Gc2 IitDocument16 pagesCours5 Dyn Gc2 IitAhmed KallelPas encore d'évaluation
- Cremona Ritter Callaud CastiglianoDocument61 pagesCremona Ritter Callaud CastiglianoStanley Adu Al MalikPas encore d'évaluation
- Epreuve de PDC PF4 2Document3 pagesEpreuve de PDC PF4 2KAMGANG FOKO Wilfried JauresPas encore d'évaluation
- Stabilite Des OuvragesDocument82 pagesStabilite Des OuvragesKHALIL MACHKOURPas encore d'évaluation
- RDM CorrigéDocument8 pagesRDM CorrigéHoùssèm Mazouz100% (1)
- ISTEUB - Béton Armé - Souha Bahlous Flexion Section T SerieDocument4 pagesISTEUB - Béton Armé - Souha Bahlous Flexion Section T SerieMoadh Trifi100% (1)
- COURS Dessin Du Batiment 2023Document145 pagesCOURS Dessin Du Batiment 2023Achraf EL HOUDAPas encore d'évaluation
- Application Du PTVDocument22 pagesApplication Du PTVBeny AbdouPas encore d'évaluation
- Cours de Beton ArméDocument17 pagesCours de Beton Arméchaymaeboufal100% (1)
- Cours Technocons (Fondations Flottantes Et Caisson Flottant) - BonDocument12 pagesCours Technocons (Fondations Flottantes Et Caisson Flottant) - BonCheikh Saliou THIOUNE100% (1)
- Corrigé Exercice 3 FlexionDocument2 pagesCorrigé Exercice 3 FlexionSalmaPas encore d'évaluation
- Exercice Corrigé de RDM Première Année PDFDocument11 pagesExercice Corrigé de RDM Première Année PDFKpangni SylverePas encore d'évaluation
- Chapitre 8 RÉPARTITION DES CONTRAINTES COMPOSANTESDocument28 pagesChapitre 8 RÉPARTITION DES CONTRAINTES COMPOSANTESSẵffǿủ JặmếsPas encore d'évaluation
- Exercice Corrige de Béton Armé BâtimentDocument5 pagesExercice Corrige de Béton Armé BâtimentMuhammad Nabil AladePas encore d'évaluation
- 3 Funiculaire Réactions Et MomentsDocument6 pages3 Funiculaire Réactions Et MomentsstafePas encore d'évaluation
- MMCDocument2 pagesMMCmsila samiPas encore d'évaluation
- +cours BA GéneralitésDocument20 pages+cours BA GéneralitésMaryem Ait elhajPas encore d'évaluation
- Chapitre I - Systèmes en Treillis IsostatiqueDocument11 pagesChapitre I - Systèmes en Treillis Isostatiquemoha mbabiPas encore d'évaluation
- Chapitre 7 Principe de SuperpositionDocument4 pagesChapitre 7 Principe de SuperpositionMohamed DallagiPas encore d'évaluation
- 5e Chapitre 3 Operations Sur Les ReelsDocument5 pages5e Chapitre 3 Operations Sur Les ReelsDidier EKPAIPas encore d'évaluation
- Chap 1 - 1 Conventions de Dessin TechniqueDocument9 pagesChap 1 - 1 Conventions de Dessin TechniqueChristian NoelPas encore d'évaluation
- Orga 38Document3 pagesOrga 38elycheikh.menePas encore d'évaluation
- Ex Amen 20123Document4 pagesEx Amen 20123med yahyaPas encore d'évaluation
- Travaux Dirigees de Resistance Des Materiaux Corrige PDFDocument71 pagesTravaux Dirigees de Resistance Des Materiaux Corrige PDFGenie MecaPas encore d'évaluation
- Exercices de TD Chromatographie Liquide Et GazDocument6 pagesExercices de TD Chromatographie Liquide Et Gazelycheikh.menePas encore d'évaluation
- Physique en TerminalesDocument93 pagesPhysique en TerminalesOumar TraoréPas encore d'évaluation
- Examen National 2019 Session normal-SPDocument7 pagesExamen National 2019 Session normal-SPAmmar LokihiPas encore d'évaluation
- Chapitre 4 CinematiqueDocument19 pagesChapitre 4 CinematiqueAbeka Kader100% (1)
- TD Moteurs AsynchronesDocument6 pagesTD Moteurs AsynchronesSOUKAINA NHARIPas encore d'évaluation
- ElectroMagn - PP - 9 - 07-08 - v10Document20 pagesElectroMagn - PP - 9 - 07-08 - v10Daba Cheikh WadePas encore d'évaluation
- SJ VomDocument27 pagesSJ Vomkacem19985Pas encore d'évaluation
- G2OTECH Resistance Au Cisaillement LGCDocument18 pagesG2OTECH Resistance Au Cisaillement LGCibtissamfakhouri777Pas encore d'évaluation
- 16 GCivil ConstructionMétalliqueMixteDocument54 pages16 GCivil ConstructionMétalliqueMixteamelPas encore d'évaluation
- DIMENSIONNEMENT & VERIFICATION FLEXION COMPOSEE D'un Arêtier EC5 FEUILLE DE CALCULDocument169 pagesDIMENSIONNEMENT & VERIFICATION FLEXION COMPOSEE D'un Arêtier EC5 FEUILLE DE CALCULjeremie_boissonPas encore d'évaluation
- Chapitre3-Assemblage Boulonné-Soudés-2021Document48 pagesChapitre3-Assemblage Boulonné-Soudés-2021Nabil LebigPas encore d'évaluation
- Corriges12 PDFDocument29 pagesCorriges12 PDFTRAOREPas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum6650% (2)
- Sujet BTS BlancDocument20 pagesSujet BTS BlancMaxime MartinezPas encore d'évaluation
- RDM GC 151220Document50 pagesRDM GC 151220brics2088Pas encore d'évaluation
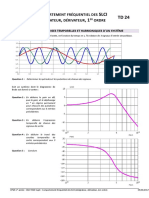
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- Etude Cinematique Du Etude Cinematique Du Cric Electrique Cric ElectriqueDocument4 pagesEtude Cinematique Du Etude Cinematique Du Cric Electrique Cric Electriquemmnlbrice67% (3)
- Cours 3Document20 pagesCours 3ÄĐĘĽ ḾṞ50% (2)
- Fiche de Travaux Dirigés Fatigue Des Matériaux - Uman2019 2020Document5 pagesFiche de Travaux Dirigés Fatigue Des Matériaux - Uman2019 2020Bidan Roland FrédéricPas encore d'évaluation
- Rapport PFE CorrigéDocument174 pagesRapport PFE CorrigésahbiPas encore d'évaluation
- 02 EurocodesDocument7 pages02 EurocodeshassenPas encore d'évaluation
- VTT ExercicesDocument3 pagesVTT ExercicesCharles GoPas encore d'évaluation
- Flexion Plane SimpleDocument20 pagesFlexion Plane SimpleMIMFS93% (14)
- Un Ballon Qui A La Banane - ImpDocument6 pagesUn Ballon Qui A La Banane - ImpNOUREDDINE OUSAIDPas encore d'évaluation
- TD n°1S3B-2023Document2 pagesTD n°1S3B-2023ulrichgnamien49Pas encore d'évaluation
- La Dynamique Du VéhiculeDocument5 pagesLa Dynamique Du VéhiculeRIKOPas encore d'évaluation
- Chap2 Lembrayage Mécanique - E. LerningDocument11 pagesChap2 Lembrayage Mécanique - E. LerningDavid100% (1)
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- 28 - Induction Électromagnétique Cours PDFDocument6 pages28 - Induction Électromagnétique Cours PDFEld AyoubPas encore d'évaluation
- Mémoire de Fin D'études Master Nouhayla JoutDocument61 pagesMémoire de Fin D'études Master Nouhayla JoutnouhailaPas encore d'évaluation
- Le Neindre B. SCDocument231 pagesLe Neindre B. SCLeifEricssonPas encore d'évaluation