Vous aimerez peut-être aussi
- Cours 1 - Le MouvementDocument7 pagesCours 1 - Le MouvementBouchra TahirPas encore d'évaluation
- Mole Et Grandeurs MolairesDocument4 pagesMole Et Grandeurs MolairesraissiradhiaPas encore d'évaluation
- Chapitre I Les SolutionDocument10 pagesChapitre I Les SolutionAndyTeck Pro (Android)Pas encore d'évaluation
- 56TQ UAA14 EleveDocument32 pages56TQ UAA14 Elever26hsp9kjsPas encore d'évaluation
- Guide Moufid Eveil Scientifique CPDocument82 pagesGuide Moufid Eveil Scientifique CPbkilham618Pas encore d'évaluation
- Polycopier de Resumé Du Cours Avec Exercices Et Corridés de Chim-SolDocument101 pagesPolycopier de Resumé Du Cours Avec Exercices Et Corridés de Chim-Solbenyamina imanePas encore d'évaluation
- Chapitre 9 La Mole Et La Concentration Molaire 2016Document5 pagesChapitre 9 La Mole Et La Concentration Molaire 2016hessasPas encore d'évaluation
- 3gt Physique Eleve - Manuel 2020-2021 Watermark 1Document164 pages3gt Physique Eleve - Manuel 2020-2021 Watermark 1Erna MaffoPas encore d'évaluation
- Serie TD Chimie Corrige l2Document14 pagesSerie TD Chimie Corrige l2bouaddouanisPas encore d'évaluation
- Fiche Pedagogique 6eme Fiche Pedagogique 6emeDocument106 pagesFiche Pedagogique 6eme Fiche Pedagogique 6ememonsieur web informaticienPas encore d'évaluation
- SciencesDocument7 pagesSciencesNantenainaTojoRakotondrafaraPas encore d'évaluation
- CH8 EXERCICES Concentration Molaire Des Espèces Moléculaires Dans Une Solution TCSbiof Prof - Mardi (WWW - Pc1.ma)Document3 pagesCH8 EXERCICES Concentration Molaire Des Espèces Moléculaires Dans Une Solution TCSbiof Prof - Mardi (WWW - Pc1.ma)Yassine BerchilPas encore d'évaluation
- Evaluation Os MusclesDocument2 pagesEvaluation Os MusclesNiangPas encore d'évaluation
- LesarticulationsducorpsDocument8 pagesLesarticulationsducorpsأحمد السعيديPas encore d'évaluation
- Chapitre 13 L'immunité Adaptative, Prolongement de L'immunité InnéeDocument12 pagesChapitre 13 L'immunité Adaptative, Prolongement de L'immunité InnéeSparrowPas encore d'évaluation
- Chap 4 Application Des Lois de Newton Aux Mouvements Circulaires UniformesDocument8 pagesChap 4 Application Des Lois de Newton Aux Mouvements Circulaires UniformesNjiasse MaazouPas encore d'évaluation
- Cours ImagerieDocument19 pagesCours ImagerieKarimaKarimaPas encore d'évaluation
- Correction Exam SVT 3ac Modèle3Document4 pagesCorrection Exam SVT 3ac Modèle3hakimaeloualidiPas encore d'évaluation
- Le Systeme Immunitaire Exercices SVT 3AC 2Document1 pageLe Systeme Immunitaire Exercices SVT 3AC 2El mazouzi youssef100% (1)
- Dysfonctionnement Du Système ImmunitaireDocument9 pagesDysfonctionnement Du Système ImmunitaireSanae AjbarPas encore d'évaluation
- SMPC S2 CHP 1 Chimie Des Solutions 21Document15 pagesSMPC S2 CHP 1 Chimie Des Solutions 21Abdelhakim BailalPas encore d'évaluation
- 1er Cour (Méthode D - Étude en Histologie)Document13 pages1er Cour (Méthode D - Étude en Histologie)Jhonny GreenPas encore d'évaluation
- DEVOIR TLE Et 3EDocument4 pagesDEVOIR TLE Et 3ENguettia Yao jean Daniel AdouPas encore d'évaluation
- Le Systeme Immunitaire Cours SVT 3AC 3Document5 pagesLe Systeme Immunitaire Cours SVT 3AC 3HIND ELAIDIPas encore d'évaluation
- Cours Complet R.CDocument385 pagesCours Complet R.CPRAIIIZ FouPas encore d'évaluation
- Influx Nerveux 2Document22 pagesInflux Nerveux 2Samia Belabbas100% (1)
- Année Académique 20 - 20Document176 pagesAnnée Académique 20 - 20QuentinPas encore d'évaluation
- Seance 2 VolcanismeDocument52 pagesSeance 2 VolcanismeAyad SaidPas encore d'évaluation
- Exercice Corrigé 02Document2 pagesExercice Corrigé 02Hicham noblePas encore d'évaluation
- Examen 15 - 3AC FR 2019 - 2020Document2 pagesExamen 15 - 3AC FR 2019 - 2020abdoPas encore d'évaluation
- Mouvement Et Repos Vitesse Moyenne Resume de Cours 1Document4 pagesMouvement Et Repos Vitesse Moyenne Resume de Cours 1Adel ZIANIPas encore d'évaluation
- Division CellulaireDocument5 pagesDivision Cellulairesherry1808100% (1)
- TP3 Eude Des Organes Reproducteurs Chez Les Angiospermes - CopieDocument5 pagesTP3 Eude Des Organes Reproducteurs Chez Les Angiospermes - CopieHãMžā BøüČęttāPas encore d'évaluation
- Villa Alessandro p3Document39 pagesVilla Alessandro p3bouget100% (1)
- Thermo en SetDocument63 pagesThermo en SetMeriem ChiboubPas encore d'évaluation
- Lycee Zahrouni-Tunis-: Mouvement Du Point MatérielDocument2 pagesLycee Zahrouni-Tunis-: Mouvement Du Point MatérielAnonymous YhXkmsEQWkPas encore d'évaluation
- Mole Et Grandeurs MolairesDocument10 pagesMole Et Grandeurs MolairesMor DiawPas encore d'évaluation
- Experience de MilikanDocument13 pagesExperience de MilikanRania SahbiPas encore d'évaluation
- Brevet Blanc Session Mars 22Document4 pagesBrevet Blanc Session Mars 22zidan Ben larbiPas encore d'évaluation
- Activit Cardiaque - A Retenir PDFDocument3 pagesActivit Cardiaque - A Retenir PDFfatou tourePas encore d'évaluation
- S22 A2 La Planification Correction SynthèseDocument6 pagesS22 A2 La Planification Correction Synthèsehakim8857Pas encore d'évaluation
- Structure Générale Du Système Immunitaire Mme LAKOMY .PPT Lecture Seule Mode de Compatibilité PDFDocument40 pagesStructure Générale Du Système Immunitaire Mme LAKOMY .PPT Lecture Seule Mode de Compatibilité PDFSoumaila GanaPas encore d'évaluation
- Adn Mitose Meiose Genetique Version Mars 2021Document56 pagesAdn Mitose Meiose Genetique Version Mars 2021FrancisPas encore d'évaluation
- Joyce RapportDocument26 pagesJoyce RapportJoyce Hervera KpadePas encore d'évaluation
- Fiche MicroscopeDocument1 pageFiche Microscopeapi-303657167Pas encore d'évaluation
- Chapitre 1 Cahier de Prof ModDocument16 pagesChapitre 1 Cahier de Prof ModIman SalamPas encore d'évaluation
- Livret SVT TsDocument140 pagesLivret SVT Tsmamadoukamara2005Pas encore d'évaluation
- Définitions Des Termes Scientifiques (1) - 210220 - 191003Document12 pagesDéfinitions Des Termes Scientifiques (1) - 210220 - 191003Zakaria KRPas encore d'évaluation
- Univers Plus Documents SVT 1AC. Verssion Finale 2018Document144 pagesUnivers Plus Documents SVT 1AC. Verssion Finale 2018Søułaymãnə ĆhyøuttîPas encore d'évaluation
- SVTEEHB 1ère D Probatoire Blanc 2 Mai 2023Document4 pagesSVTEEHB 1ère D Probatoire Blanc 2 Mai 2023Loic UlrichPas encore d'évaluation
- Evaluations Mouvement Interactions Forces Poids Gravitation 3èmeDocument4 pagesEvaluations Mouvement Interactions Forces Poids Gravitation 3èmeHectaPas encore d'évaluation
- Examen Sta ProDocument1 pageExamen Sta ProAlexis JamesPas encore d'évaluation
- Physique Chimie: Tout-En-UnDocument50 pagesPhysique Chimie: Tout-En-UnPoul PoulPas encore d'évaluation
- Guide 5ème 2014Document46 pagesGuide 5ème 2014CEG1 DASSA-ZOUMEPas encore d'évaluation
- 1ER PC CHAP 01 ExercicesDocument73 pages1ER PC CHAP 01 ExercicesSidhoum SidPas encore d'évaluation
- CommensalismeDocument1 pageCommensalismeCHOU MONPas encore d'évaluation
- Le Corrigé Des Exercices de Physique Chimie 6èmeDocument2 pagesLe Corrigé Des Exercices de Physique Chimie 6èmegabrielmoulouvxlPas encore d'évaluation
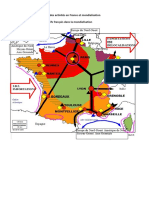
- Croquis Les Dynamiques Des Espaces Productifs Francais Dans La Mondialisation.Document2 pagesCroquis Les Dynamiques Des Espaces Productifs Francais Dans La Mondialisation.Anonymous Kt6SaY100% (1)
- Liste de Manuels 2022-2023Document10 pagesListe de Manuels 2022-2023gael ipoungouPas encore d'évaluation
- Le Mouvement 2019Document5 pagesLe Mouvement 2019KarimBenA100% (1)
- CORRIGE Ex1-SERIE 2Document2 pagesCORRIGE Ex1-SERIE 2SOUFIANE BOURCHIHPas encore d'évaluation
- Passage CPI1 Sujet - BTS 2019Document2 pagesPassage CPI1 Sujet - BTS 2019SMOVEPas encore d'évaluation
- Chap 3Document76 pagesChap 3YOUNES ZAHIPas encore d'évaluation
- Chapitre 6: Profil en Long: 6.1 GeneralitesDocument10 pagesChapitre 6: Profil en Long: 6.1 GeneralitesJordan Patrick LontchiPas encore d'évaluation
- Chapitre 2 - ThermodynamiqueDocument13 pagesChapitre 2 - ThermodynamiqueWiam ElboukriouiPas encore d'évaluation
- Correction Tds ThermoDocument43 pagesCorrection Tds ThermoAbdnour Rhanja0% (1)
- TD4 ENSTA CorrigéDocument5 pagesTD4 ENSTA CorrigéSouid GhadaPas encore d'évaluation
- DM Sous-Groupes A Un Parametre GL2CDocument1 pageDM Sous-Groupes A Un Parametre GL2CYientiabri Barthélémy Phinéhas TindanoPas encore d'évaluation
- MP1M1Document8 pagesMP1M1bassem SakjiPas encore d'évaluation
- Chapitre VII Thermochimie PDFDocument14 pagesChapitre VII Thermochimie PDFÇiçek KokusuPas encore d'évaluation
- TD Ri 02Document1 pageTD Ri 02loubna khlfPas encore d'évaluation
- DM 8 - Variations + PBDocument2 pagesDM 8 - Variations + PBbonvalot RobinPas encore d'évaluation
- MMC Exercices Corrigés 01Document57 pagesMMC Exercices Corrigés 01mathieut157Pas encore d'évaluation
- Electrostatique Locale PDFDocument17 pagesElectrostatique Locale PDFMohamed Es-sedratyPas encore d'évaluation
- TD1.Esp - Vect Appl - LinDocument5 pagesTD1.Esp - Vect Appl - LinTraoré InoussaPas encore d'évaluation
- (WWW - Clubetudiants.ma) - Cours de Thermodynamique Nov 2015Document135 pages(WWW - Clubetudiants.ma) - Cours de Thermodynamique Nov 2015Rondello99Pas encore d'évaluation
- SERIE 4 Changement RéférentielDocument3 pagesSERIE 4 Changement RéférentielOussama parkour. Red100% (1)
- PdM5 SN Guide Section3-6Document4 pagesPdM5 SN Guide Section3-6Tristan WatPas encore d'évaluation
- 5 7-PDF AideM C3 A9moireVOM PDFDocument1 page5 7-PDF AideM C3 A9moireVOM PDFMourad BoukhedimiPas encore d'évaluation
- Physics Paper 1 TZ2 HLDocument20 pagesPhysics Paper 1 TZ2 HLmohamadPas encore d'évaluation
- Chap5 MTH104Document2 pagesChap5 MTH104Yvann ArutoPas encore d'évaluation
- Coursetexercicesde Thermodynamique ZoubeidaDocument59 pagesCoursetexercicesde Thermodynamique Zoubeidayverlandmoukala55Pas encore d'évaluation
- Test2 RR2022 23 SolDocument2 pagesTest2 RR2022 23 Soltraorekanou10Pas encore d'évaluation
- E 2ME PRINCIPE TD62emeprincipethermo PDFDocument6 pagesE 2ME PRINCIPE TD62emeprincipethermo PDFMosaab Echabane100% (1)
- TD2 Mecanique 18-19 CorrigeDocument11 pagesTD2 Mecanique 18-19 CorrigeSouka TouhaPas encore d'évaluation
- TD - 1 - 2024 - EptDocument1 pageTD - 1 - 2024 - EptnyoussouphaPas encore d'évaluation
- Chap Syst Part 3 A12 RobDocument25 pagesChap Syst Part 3 A12 RobOURO-AGOUDAPas encore d'évaluation
- Cours Thermodynamique (Dr/OUDRANE Abdellatif) Université Ahmed Draya - Adrar (2022)Document147 pagesCours Thermodynamique (Dr/OUDRANE Abdellatif) Université Ahmed Draya - Adrar (2022)Abdellatif OudranePas encore d'évaluation
- Résumé de Cours - Espaces Préhilbertiens, Euclidiens, Matrices OrthogonalesDocument7 pagesRésumé de Cours - Espaces Préhilbertiens, Euclidiens, Matrices Orthogonalesouboudrar ismailPas encore d'évaluation
- Chapitre 3 - Transfert de Chaleur Par Conduction en Régime Permanent PDFDocument80 pagesChapitre 3 - Transfert de Chaleur Par Conduction en Régime Permanent PDFĶhadija KhadijaPas encore d'évaluation