Vous aimerez peut-être aussi
- Sujet Premiere Francais Concours General 2019Document2 pagesSujet Premiere Francais Concours General 2019Seydou sanéPas encore d'évaluation
- 2019 PHCH 1226041Document20 pages2019 PHCH 1226041Eric LefrançaisPas encore d'évaluation
- PV Fba L2Document2 pagesPV Fba L2STEPHANE KOUAKOUPas encore d'évaluation
- 1850KaantymisenHarjoitus PDFDocument136 pages1850KaantymisenHarjoitus PDFKimmo KemppainenPas encore d'évaluation
- Cabo DelgadoDocument1 pageCabo DelgadoPaulo JorgePas encore d'évaluation
- Exemple E4 Tableau Synthese 2022Document1 pageExemple E4 Tableau Synthese 2022pjusselme94Pas encore d'évaluation
- LA MADELEINE - MÇo Fichaux - 100 - PIC - IndFDocument1 pageLA MADELEINE - MÇo Fichaux - 100 - PIC - IndFHammoutiPas encore d'évaluation
- Schema Final Projet Insta 1Document2 pagesSchema Final Projet Insta 1constantino BATABEREPas encore d'évaluation
- Inhambane PDFDocument1 pageInhambane PDFPaulo Jorge100% (1)
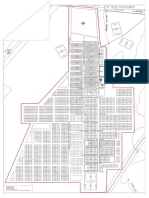
- Onnet-Cali-Colon-Cl Poligono5-Ca13-Scl28-Za-354 Hhpp-Red-Rotulo2Document1 pageOnnet-Cali-Colon-Cl Poligono5-Ca13-Scl28-Za-354 Hhpp-Red-Rotulo2Andres Felipe Pajoy ZuñigaPas encore d'évaluation
- Chemise Verte Mme DupuisDocument2 pagesChemise Verte Mme Dupuis亗Pas encore d'évaluation
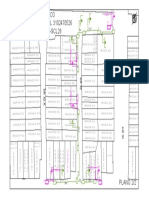
- Etage 7 CoteDocument1 pageEtage 7 Cotehugor julio dopgangPas encore d'évaluation
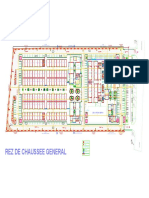
- Rez de Chaussee General: Vaepc Vaepc VaepcDocument1 pageRez de Chaussee General: Vaepc Vaepc VaepcRulexx SudPas encore d'évaluation
- Schema Final Projet Insta 1 Revu A4 PaysageDocument2 pagesSchema Final Projet Insta 1 Revu A4 Paysageconstantino BATABEREPas encore d'évaluation
- Encore - Untitled - 1.pdf PIANO DESCDocument2 pagesEncore - Untitled - 1.pdf PIANO DESCDanielPas encore d'évaluation
- QSS2-JEG-VE-01-DR-M-4503-D4.C01 First Floor Ventilation Services Layout Sheet 3 of 8Document1 pageQSS2-JEG-VE-01-DR-M-4503-D4.C01 First Floor Ventilation Services Layout Sheet 3 of 8Nideesh RobertPas encore d'évaluation
- PR 37Document1 pagePR 37Hassaan AhmedPas encore d'évaluation
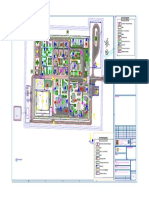
- Arq Final Astingitalo LolitiradoDocument1 pageArq Final Astingitalo LolitiradoItalo LoliPas encore d'évaluation
- 3 Les QuadripôlesDocument2 pages3 Les QuadripôlesAngePas encore d'évaluation
- 380 Residencesenfrance PDFDocument50 pages380 Residencesenfrance PDFEvelyn VergaraPas encore d'évaluation
- 18DENOVIEMBREDocument1 page18DENOVIEMBREruben jujuyPas encore d'évaluation
- Dyz 6 PRX VsuDocument1 pageDyz 6 PRX VsuEl Libertador EmperadorPas encore d'évaluation
- TEMPLATE RAPPORT RT Report1Document6 pagesTEMPLATE RAPPORT RT Report1Med CHPas encore d'évaluation
- Csi001 001 ZZ PL Et 000007Document1 pageCsi001 001 ZZ PL Et 000007Fernando Michell Leon RengifoPas encore d'évaluation
- Plan Archi 1erDocument1 pagePlan Archi 1erYassine HoumadinePas encore d'évaluation
- Plan Archi 2èmeDocument1 pagePlan Archi 2èmeYassine HoumadinePas encore d'évaluation
- Investir-7 Janvier 2023Document58 pagesInvestir-7 Janvier 2023zakaria salhiPas encore d'évaluation
- Agradeço - Ivan Canzi - ClarineteDocument1 pageAgradeço - Ivan Canzi - ClarineteerquispartiturasgratisPas encore d'évaluation
- DWG SuperimposedDocument4 pagesDWG Superimposedm.nurhishammPas encore d'évaluation
- Overview MergedDocument4 pagesOverview Mergedm.nurhishammPas encore d'évaluation
- Workdone StatementDocument1 pageWorkdone Statementdinesh reddyPas encore d'évaluation
- Orientações MVDocument3 pagesOrientações MVJulian TuraziPas encore d'évaluation
- Pdl1 PDL10 PDL11 PDL12 PDL13 PDL17 Pdl9: SC14 SC13 SC15Document1 pagePdl1 PDL10 PDL11 PDL12 PDL13 PDL17 Pdl9: SC14 SC13 SC15MERRYPas encore d'évaluation
- PRO - SJM - 8051 - 40-10-10 - 30-63 - Plan Des Ouvrages de 1ère Catégorie - 0Document6 pagesPRO - SJM - 8051 - 40-10-10 - 30-63 - Plan Des Ouvrages de 1ère Catégorie - 0mining.ing.aePas encore d'évaluation
- Plano Perimetrico La Vega (A3)Document1 pagePlano Perimetrico La Vega (A3)MAX KEVIN YARANGA ÑAUPARIPas encore d'évaluation
- Ementa MunLoures - 2023 - 02 - 12 - A 31 - 12Document4 pagesEmenta MunLoures - 2023 - 02 - 12 - A 31 - 12neuza.aa.cruzPas encore d'évaluation
- 5 PUD Zonage ModfiS1 CentreDocument1 page5 PUD Zonage ModfiS1 CentreCharles EMAINPas encore d'évaluation
- 41.GSP GSS Perumahan Lagon NuansaDocument1 page41.GSP GSS Perumahan Lagon Nuansasilmi saelyPas encore d'évaluation
- DetalhamentoDocument1 pageDetalhamentofeliphePas encore d'évaluation
- Lebanon Maps - 539-44Document1 pageLebanon Maps - 539-44Frieddrich SchultzPas encore d'évaluation
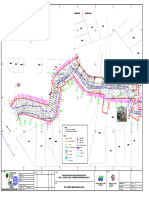
- DESAGUE - Linea de ConduccionDocument1 pageDESAGUE - Linea de Conduccionkristian MéndezPas encore d'évaluation
- Detalle de Viga eDocument1 pageDetalle de Viga ePEDRO REYESPas encore d'évaluation
- Horaires Cotes Darmor Hiver Ligne6Document2 pagesHoraires Cotes Darmor Hiver Ligne6payPas encore d'évaluation
- NUGAWODocument2 pagesNUGAWOafatchaoedem815Pas encore d'évaluation
- 5Document1 page5Sarah NourhenePas encore d'évaluation
- Carex Baru - Urbanismo1Document1 pageCarex Baru - Urbanismo1cristian herrera ceballosPas encore d'évaluation
- Plan Salle SS1-202-203-204-206-207Document1 pagePlan Salle SS1-202-203-204-206-207oussPas encore d'évaluation
- If Planta Asfaltos Gallegos R01-Lam1Document1 pageIf Planta Asfaltos Gallegos R01-Lam1nelson ruizPas encore d'évaluation
- Plan 009 - Indice B - Plan Du Reseau Mt-ilot12-Ilot12Document1 pagePlan 009 - Indice B - Plan Du Reseau Mt-ilot12-Ilot12Ouins OlympePas encore d'évaluation
- PHASE-01: Typical Sensor Fixing Detail For Open AreaDocument1 pagePHASE-01: Typical Sensor Fixing Detail For Open AreaSenthilmurugan KumaresanPas encore d'évaluation
- Schermafbeelding 2024-03-07 Om 07.45.59Document1 pageSchermafbeelding 2024-03-07 Om 07.45.59meo97Pas encore d'évaluation
- Adobe Scan 7 Feb 2024Document1 pageAdobe Scan 7 Feb 2024fashionstop288Pas encore d'évaluation
- CRU4 SVC4 Carto MP2Document1 pageCRU4 SVC4 Carto MP2Rdem GafuramaPas encore d'évaluation
- Tableau de CompetencesDocument2 pagesTableau de Competencesapi-359420495Pas encore d'évaluation
- 6 Projet ArchitectureDocument18 pages6 Projet ArchitectureSelma HamalPas encore d'évaluation
- QSS2-JEG-CW-RF-DR-M-3511-D4.C01 Roof Level Refrigerant Services Layout Sheet 3 of 8Document1 pageQSS2-JEG-CW-RF-DR-M-3511-D4.C01 Roof Level Refrigerant Services Layout Sheet 3 of 8Nideesh RobertPas encore d'évaluation
- Investir N1948Document64 pagesInvestir N1948Amirouche HamadouchePas encore d'évaluation
- 21-08-DELL-20230714 - AUT DéfDocument5 pages21-08-DELL-20230714 - AUT DéfbrugnoniPas encore d'évaluation
- 2024 Fiche DinterventionDocument1 page2024 Fiche Dinterventionvmgtjcv9wvPas encore d'évaluation
- Arthron RobotDocument2 pagesArthron RobotIlyas MhammediPas encore d'évaluation
- 9248 16siscnc1Document19 pages9248 16siscnc1Ilyas MhammediPas encore d'évaluation
- Examens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFDocument10 pagesExamens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFIlyas MhammediPas encore d'évaluation
- MP MATHS MINES 1 2016.extraitDocument4 pagesMP MATHS MINES 1 2016.extraitIlyas MhammediPas encore d'évaluation
- TD Diagramme de BodeDocument5 pagesTD Diagramme de BodeIlyas MhammediPas encore d'évaluation
- Onduleurs REDDocument14 pagesOnduleurs REDIlyas MhammediPas encore d'évaluation
- PSI1 MathsDocument8 pagesPSI1 MathsIlyas MhammediPas encore d'évaluation
- Corrige Des Exercices Du Chapitre 3 3 1Document15 pagesCorrige Des Exercices Du Chapitre 3 3 1Ilyas MhammediPas encore d'évaluation
- Algebre Lineaire 2020Document109 pagesAlgebre Lineaire 2020Ilyas MhammediPas encore d'évaluation
- Etude Dynamique D'un Circuit Magnétique Non Linéaire: March 2005Document7 pagesEtude Dynamique D'un Circuit Magnétique Non Linéaire: March 2005Ilyas MhammediPas encore d'évaluation
- Chapitre 1Document87 pagesChapitre 1Ilyas MhammediPas encore d'évaluation
- Ex 02 STS1 ElectromagnetismeDocument28 pagesEx 02 STS1 ElectromagnetismeIlyas MhammediPas encore d'évaluation
- PT 2018-2019 21-09-2018 Devoir Surveille #1Document21 pagesPT 2018-2019 21-09-2018 Devoir Surveille #1Ilyas MhammediPas encore d'évaluation
- 05 TDs Logique CombinatoireDocument18 pages05 TDs Logique CombinatoireIlyas MhammediPas encore d'évaluation
- Baccalauréat Scientifique Épreuve de Sciences de L'ingénieurDocument23 pagesBaccalauréat Scientifique Épreuve de Sciences de L'ingénieurIlyas MhammediPas encore d'évaluation
- 2018 Les Rivages UrbainsDocument51 pages2018 Les Rivages UrbainsIlyas MhammediPas encore d'évaluation
- 96 Ssi Sujet Zero Version 1Document37 pages96 Ssi Sujet Zero Version 1Ilyas MhammediPas encore d'évaluation
- COMAXDocument5 pagesCOMAXIlyas MhammediPas encore d'évaluation
- Eléments de Correction: Problème 1: Etude Du Thames Barrière (1 H)Document12 pagesEléments de Correction: Problème 1: Etude Du Thames Barrière (1 H)Ilyas MhammediPas encore d'évaluation
- CNC Si Tsi GM 2018 CGDocument6 pagesCNC Si Tsi GM 2018 CGIlyas MhammediPas encore d'évaluation
- Montage de Verins Et Liaisons EquivalentesDocument9 pagesMontage de Verins Et Liaisons EquivalentesIlyas MhammediPas encore d'évaluation
- CNC Si Tsi GM 2012Document7 pagesCNC Si Tsi GM 2012Ilyas MhammediPas encore d'évaluation
- Chevre AtelierDocument4 pagesChevre AtelierIlyas MhammediPas encore d'évaluation
- Exos GeoplanDocument3 pagesExos GeoplanIlyas MhammediPas encore d'évaluation
- CCS MP SI 2021 SystmeDeStationnementAutomatique SujetDocument21 pagesCCS MP SI 2021 SystmeDeStationnementAutomatique SujetIlyas MhammediPas encore d'évaluation
- Article de Presentation Du Rotulage Version IllustreeDocument9 pagesArticle de Presentation Du Rotulage Version IllustreeIlyas MhammediPas encore d'évaluation
- 96 Ssi Sujet Zero Version 2 Bonne CopieDocument12 pages96 Ssi Sujet Zero Version 2 Bonne CopieIlyas MhammediPas encore d'évaluation
- Rapport Oral TP SIDocument5 pagesRapport Oral TP SIIlyas MhammediPas encore d'évaluation
- Se Nourrir en Conscience - Gabriel CousensDocument684 pagesSe Nourrir en Conscience - Gabriel Cousensmes réductions bioPas encore d'évaluation
- Cours Chouaf - Pratiques Urbanisme Operat 2016 PDFDocument144 pagesCours Chouaf - Pratiques Urbanisme Operat 2016 PDFAhmed HoufPas encore d'évaluation
- Le Petit Guide Pratique 2016 2017Document60 pagesLe Petit Guide Pratique 2016 2017_black_key_Pas encore d'évaluation
- Devis Chair PDFDocument2 pagesDevis Chair PDFHervé D'AvillaPas encore d'évaluation
- COMPO DE PASSAGE CE2 Exp Dictee A ImprimerDocument2 pagesCOMPO DE PASSAGE CE2 Exp Dictee A Imprimerאור האהבה רוח חזקה100% (2)
- Fisca Internationale - Partie 2Document30 pagesFisca Internationale - Partie 2Anas Damoun100% (1)
- Dans La Salle Dattente de Dieu Dans Quelle Période Êtes-VousDocument1 pageDans La Salle Dattente de Dieu Dans Quelle Période Êtes-VousdavidPas encore d'évaluation
- DUNGS - Pressure Switch LGW A2-A2P - Instruction ManualDocument12 pagesDUNGS - Pressure Switch LGW A2-A2P - Instruction ManualNoparit KittisatitPas encore d'évaluation
- Questions Sur La Galette Des RoisDocument2 pagesQuestions Sur La Galette Des RoisATPas encore d'évaluation
- RECUEILEDE5 FinalprocidingDocument275 pagesRECUEILEDE5 FinalprocidingMansour HassanePas encore d'évaluation
- Exercices Sur La Methode Des Differences Finies 1Document2 pagesExercices Sur La Methode Des Differences Finies 1Adel BenmessaoudPas encore d'évaluation
- La Gestion Des Approvisionnements Et de StockDocument28 pagesLa Gestion Des Approvisionnements Et de Stockel khaiat mohamed aminePas encore d'évaluation
- Bob MarleyDocument1 pageBob MarleyLes Archives TeleramaPas encore d'évaluation
- Maison Artemisia Bulletin AdhesionDocument4 pagesMaison Artemisia Bulletin AdhesionChiekhna Cheikh Sadbou FayePas encore d'évaluation
- Neuvaines Pour Le Mois D'avrilDocument1 pageNeuvaines Pour Le Mois D'avrillydiaPas encore d'évaluation
- ReimsDocument13 pagesReimsvicnet31Pas encore d'évaluation
- Les Questions Et Les... - Entretien, CV Et Lettre de Motivation. - FacebookDocument4 pagesLes Questions Et Les... - Entretien, CV Et Lettre de Motivation. - Facebookabdeljalil ibn yassinePas encore d'évaluation
- 4° - Emprunt Et Metissage Dans La Chanson ActuelleDocument5 pages4° - Emprunt Et Metissage Dans La Chanson Actuellebamora53Pas encore d'évaluation
- Guide Conception Genie IndustrielDocument55 pagesGuide Conception Genie IndustrielDaroonPas encore d'évaluation
- Ebauche Projet MemoireDocument10 pagesEbauche Projet MemoireTerry BELFLEURPas encore d'évaluation
- Diagnostic Nord Ouest Nov 2019Document32 pagesDiagnostic Nord Ouest Nov 2019Roller Saint PierrePas encore d'évaluation
- MMMMM MERABET - Samira PDFDocument122 pagesMMMMM MERABET - Samira PDFMario MandžukićPas encore d'évaluation
- Pujilah Allah Dalam Bait-Nya: Panggilan IbadahDocument112 pagesPujilah Allah Dalam Bait-Nya: Panggilan IbadahJoshua ArielPas encore d'évaluation
- Support de Cours - Le Metier D'assistante de DirectionDocument17 pagesSupport de Cours - Le Metier D'assistante de DirectionDEEP 2KPas encore d'évaluation
- Politique Nationale de Nutrition Et Plan National D'action Pour La Nutrition (ONN-2004)Document66 pagesPolitique Nationale de Nutrition Et Plan National D'action Pour La Nutrition (ONN-2004)HayZara Madagascar100% (1)
- K9C Fiches TM 39-M-15Document9 pagesK9C Fiches TM 39-M-15Matheus B. SilvaPas encore d'évaluation
- rabarisoaVazolyN SN M2 09Document52 pagesrabarisoaVazolyN SN M2 09RmjulienPas encore d'évaluation
- RapportDocument27 pagesRapportFellahi AyaPas encore d'évaluation
- Les Protocoles de Base TCPDocument17 pagesLes Protocoles de Base TCPBenie DE DieuPas encore d'évaluation
- Borderô Diário Da Anserve Data: ApartDocument18 pagesBorderô Diário Da Anserve Data: ApartKaique FreitasPas encore d'évaluation