Vous aimerez peut-être aussi
- MQ-TD & ExamensDocument37 pagesMQ-TD & ExamensFatima ElmourabitPas encore d'évaluation
- Couplage Magneto-Mecanique Pour Le Dimensionnement de Machines ElectriquesDocument5 pagesCouplage Magneto-Mecanique Pour Le Dimensionnement de Machines ElectriquesadrarwalidPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Mécanique Quantique - TD Et ExamensDocument29 pagesMécanique Quantique - TD Et Examenselmouainiabdelhakim9Pas encore d'évaluation
- TPE Énergie SolaireDocument11 pagesTPE Énergie SolaireAymard MougouPas encore d'évaluation
- Distribution Electrique PDFDocument106 pagesDistribution Electrique PDFAbdoulaye SoumahoroPas encore d'évaluation
- PréfaceDocument8 pagesPréfaceAmina ReminiPas encore d'évaluation
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- MMC Chapitre 1 EstemDocument23 pagesMMC Chapitre 1 Estemmehdi HEDDAJPas encore d'évaluation
- 5ESPE Théorie Champs Tournants 2018 2019 2 en 1Document13 pages5ESPE Théorie Champs Tournants 2018 2019 2 en 1fazfrito lacaviataPas encore d'évaluation
- Analyse XDocument10 pagesAnalyse Xpabouch100% (2)
- 2015 L2 SPIUE4 Session 1Document2 pages2015 L2 SPIUE4 Session 1kouakoukouassielyse76Pas encore d'évaluation
- Chapitre III - Les Circuits MagnétiquesDocument11 pagesChapitre III - Les Circuits MagnétiqueshafidPas encore d'évaluation
- Physique HarmonisationDocument19 pagesPhysique HarmonisationImad BenabdouallahPas encore d'évaluation
- CFM2007 1130Document6 pagesCFM2007 1130AdnanePas encore d'évaluation
- Problèmes de Mécanique - Quantique - Kalitzky-Karnakov PDFDocument309 pagesProblèmes de Mécanique - Quantique - Kalitzky-Karnakov PDFEdwar Salazar0% (1)
- P2 CH1 Logique BooléenneDocument37 pagesP2 CH1 Logique Booléennejackjackie344090990Pas encore d'évaluation
- Chapitre 2Document11 pagesChapitre 2LkhaybPas encore d'évaluation
- Structure Des Materiaux III DiffractionDocument27 pagesStructure Des Materiaux III DiffractionBoukalmoune IbrahimPas encore d'évaluation
- Chapter 01partie01 VZrReZDocument15 pagesChapter 01partie01 VZrReZisraPas encore d'évaluation
- CNC MP 2015 Physique 2 EpreuveDocument9 pagesCNC MP 2015 Physique 2 EpreuveMajda EL HAEKPas encore d'évaluation
- Cours Genie MecaniqueDocument12 pagesCours Genie MecaniqueMohamed BelhassenPas encore d'évaluation
- Cours Cristaux Photoniques M1 MicroélectroniqueDocument42 pagesCours Cristaux Photoniques M1 MicroélectroniqueIsraa Wissal RedouanePas encore d'évaluation
- Article 3 Bokovi 2007Document11 pagesArticle 3 Bokovi 2007Khd AchourPas encore d'évaluation
- PPHY01Document102 pagesPPHY01gislaincarden kamtakwapnangPas encore d'évaluation
- Microscope Effet TunnelDocument10 pagesMicroscope Effet TunnelDhouha BouaggaPas encore d'évaluation
- Epreuve de La Matière:: Exercice 1Document2 pagesEpreuve de La Matière:: Exercice 1Oubaida21 SnackPas encore d'évaluation
- ICPEED14Document7 pagesICPEED14Dadi AzizPas encore d'évaluation
- Devoir de Maison Sources de CourantDocument8 pagesDevoir de Maison Sources de CourantLilia BennaceurPas encore d'évaluation
- La Théorie de La Fonctionnelle de La Densité Et Ses Applications en NanotechnologieDocument25 pagesLa Théorie de La Fonctionnelle de La Densité Et Ses Applications en Nanotechnologieamine jodarPas encore d'évaluation
- Tds Chimie Quantique l3Document15 pagesTds Chimie Quantique l3يا سينPas encore d'évaluation
- Chapitre 2 Généralités Sur Les CapteursDocument10 pagesChapitre 2 Généralités Sur Les CapteursBenrabah IkhlasPas encore d'évaluation
- TD InductionDocument4 pagesTD InductionPkpk StafPas encore d'évaluation
- Préparation Concours Technologues Mécanique2Document51 pagesPréparation Concours Technologues Mécanique2Amina DinariPas encore d'évaluation
- Thomas HeiserDocument192 pagesThomas HeiserJušt LǿǾkPas encore d'évaluation
- Sujets ElectromagnetismeDocument12 pagesSujets ElectromagnetismeKimou Hakim0% (1)
- Physique Des VibrationsDocument499 pagesPhysique Des VibrationsɌąfīķ100% (2)
- Aihp 1932 2 4 269 0Document43 pagesAihp 1932 2 4 269 0Gopal PunithanPas encore d'évaluation
- Deconvolution V5Document12 pagesDeconvolution V5Jean-Pierre FANTONPas encore d'évaluation
- Réponse Transitoire D'un Réseau de Terre Simple Géométrie - Cas D PDFDocument6 pagesRéponse Transitoire D'un Réseau de Terre Simple Géométrie - Cas D PDFMendel Abi FimboPas encore d'évaluation
- Dynamique Des Structures Comportant DesDocument9 pagesDynamique Des Structures Comportant DesSalah KodsPas encore d'évaluation
- TD2 Traitement Du SignalDocument3 pagesTD2 Traitement Du SignalSaaid SaaidPas encore d'évaluation
- Tpe PVDocument12 pagesTpe PVAymard MougouPas encore d'évaluation
- Ajp Jphyscol198142c119Document16 pagesAjp Jphyscol198142c119Wassini BensPas encore d'évaluation
- Concours D Admission Sciences Industrielles-X - Si - 2004Document20 pagesConcours D Admission Sciences Industrielles-X - Si - 2004PiedmondPas encore d'évaluation
- Tsi Physique PDFDocument10 pagesTsi Physique PDFAymen DanounPas encore d'évaluation
- TD2017 2018Document46 pagesTD2017 2018Hasan Elmoumni100% (3)
- TD2 Chimie Quantique 2023 2024Document2 pagesTD2 Chimie Quantique 2023 2024JerryPas encore d'évaluation
- Compte Rendu AnalogiqueDocument15 pagesCompte Rendu AnalogiqueOUMAIMA BAHAFIDPas encore d'évaluation
- Determination Auto Consistante Des Frequences Propres de Poutres Et de Plaques Orthotropes.Document8 pagesDetermination Auto Consistante Des Frequences Propres de Poutres Et de Plaques Orthotropes.amira khaldiPas encore d'évaluation
- Questions CoursDocument2 pagesQuestions CoursjalaoumohamedPas encore d'évaluation
- TD-MQ 2009Document12 pagesTD-MQ 2009Salah Eddine SafyounPas encore d'évaluation
- ميكانيكااDocument18 pagesميكانيكااBrahmi SouilahPas encore d'évaluation
- Les Circuits MagnétiquesDocument33 pagesLes Circuits MagnétiquesAnas KertyPas encore d'évaluation
- SLCI ModelisationDocument6 pagesSLCI ModelisationMurat BasPas encore d'évaluation
- Arthron RobotDocument2 pagesArthron RobotIlyas MhammediPas encore d'évaluation
- UPSTI Corrige CCP TSI 2016 TelesiegeDebrayableDocument9 pagesUPSTI Corrige CCP TSI 2016 TelesiegeDebrayableTheKing 68Pas encore d'évaluation
- 9248 16siscnc1Document19 pages9248 16siscnc1Ilyas MhammediPas encore d'évaluation
- Examens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFDocument10 pagesExamens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFIlyas MhammediPas encore d'évaluation
- 8779 Sciences de Ingenieur S 2016Document23 pages8779 Sciences de Ingenieur S 2016AFADPas encore d'évaluation
- CNC Si Tsi Ge 2016Document18 pagesCNC Si Tsi Ge 2016Monsif monsifPas encore d'évaluation
- 2015 TH Sammour Hussein PDFDocument122 pages2015 TH Sammour Hussein PDFAchraf AlaouiPas encore d'évaluation
- COMAXDocument5 pagesCOMAXIlyas MhammediPas encore d'évaluation
- PSI1 MathsDocument8 pagesPSI1 MathsIlyas MhammediPas encore d'évaluation
- Chapitre 2 ConceptionDocument103 pagesChapitre 2 ConceptionRaed BrayekPas encore d'évaluation
- Algebre Lineaire 2020Document109 pagesAlgebre Lineaire 2020Ilyas MhammediPas encore d'évaluation
- COMAXDocument5 pagesCOMAXIlyas MhammediPas encore d'évaluation
- Onduleurs REDDocument14 pagesOnduleurs REDIlyas MhammediPas encore d'évaluation
- TD Diagramme de BodeDocument5 pagesTD Diagramme de BodeIlyas MhammediPas encore d'évaluation
- Ex 02 STS1 ElectromagnetismeDocument28 pagesEx 02 STS1 ElectromagnetismeAbdelbaki Elfahem100% (3)
- 21 SeptembreDocument34 pages21 SeptembreProfesseur De MATHSPas encore d'évaluation
- MP MATHS MINES 1 2016.extraitDocument4 pagesMP MATHS MINES 1 2016.extraitIlyas MhammediPas encore d'évaluation
- Ex 02 STS1 ElectromagnetismeDocument28 pagesEx 02 STS1 ElectromagnetismeIlyas MhammediPas encore d'évaluation
- 05 TDs Logique CombinatoireDocument18 pages05 TDs Logique CombinatoireIlyas MhammediPas encore d'évaluation
- 04 Electrocinetique Regimes Transitoires PDFDocument8 pages04 Electrocinetique Regimes Transitoires PDFRiad TifaPas encore d'évaluation
- Les Appareils MagnétoélectriqueDocument22 pagesLes Appareils MagnétoélectriqueAnonymous MWy9YAF30100% (2)
- Chapitre 1Document87 pagesChapitre 1Ilyas MhammediPas encore d'évaluation
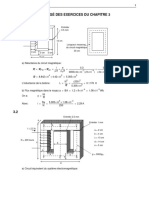
- Corrige Des Exercices Du Chapitre 3 3 1Document15 pagesCorrige Des Exercices Du Chapitre 3 3 1Ilyas MhammediPas encore d'évaluation
- PT 2018-2019 21-09-2018 Devoir Surveille #1Document21 pagesPT 2018-2019 21-09-2018 Devoir Surveille #1Ilyas MhammediPas encore d'évaluation
- CNC Si Tsi GM 2018 CGDocument6 pagesCNC Si Tsi GM 2018 CGIlyas MhammediPas encore d'évaluation
- 2018 Les Rivages UrbainsDocument51 pages2018 Les Rivages UrbainsIlyas MhammediPas encore d'évaluation
- 96 Ssi Sujet Zero Version 1Document37 pages96 Ssi Sujet Zero Version 1Ilyas MhammediPas encore d'évaluation
- 96 Ssi Sujet Zero Version 2 Bonne CopieDocument12 pages96 Ssi Sujet Zero Version 2 Bonne CopieIlyas MhammediPas encore d'évaluation
- Baccalauréat Scientifique Épreuve de Sciences de L'ingénieurDocument23 pagesBaccalauréat Scientifique Épreuve de Sciences de L'ingénieurIlyas MhammediPas encore d'évaluation
- Exposé Langages RegistresDocument16 pagesExposé Langages RegistresAyoub ArjdalPas encore d'évaluation
- Chappitre1 ZinbDocument13 pagesChappitre1 ZinbBelhout Belhout maroiaPas encore d'évaluation
- Guide-Complements NYA H23Document58 pagesGuide-Complements NYA H23mathis.stgelais26Pas encore d'évaluation
- Framabook5 Latex v1 Chapitre-3 Art-Libre PDFDocument17 pagesFramabook5 Latex v1 Chapitre-3 Art-Libre PDFYoussef FatihiPas encore d'évaluation
- MAT4112 ch2 v2007Document12 pagesMAT4112 ch2 v2007Joel TamoPas encore d'évaluation
- Scillations Libres Des Systèmes À Deux Degrés de LibertéDocument23 pagesScillations Libres Des Systèmes À Deux Degrés de LibertéonkPas encore d'évaluation
- TP EcoulDocument10 pagesTP EcoulAbdelhafid MoumnaPas encore d'évaluation
- Tipe Exemple Popagation D'un PolluantDocument16 pagesTipe Exemple Popagation D'un Polluantالعالم المظلمPas encore d'évaluation
- AlgebreDocument161 pagesAlgebreadjidavibruno7Pas encore d'évaluation
- Seance 1Document107 pagesSeance 1Simou El alamiPas encore d'évaluation
- SMIA2 Equations DifférentiellesDocument30 pagesSMIA2 Equations DifférentiellesAbdelhadi LahouaPas encore d'évaluation
- Chapitre 7 Combinatoire Des Equation DiffDocument78 pagesChapitre 7 Combinatoire Des Equation DiffSalay Jean Victort FlodioPas encore d'évaluation
- Chap8 Equation Et Inéquation Du 1er Dégre Dans IRDocument6 pagesChap8 Equation Et Inéquation Du 1er Dégre Dans IRMarcelle Pouomegne100% (2)
- Chap 3Document35 pagesChap 3filsdivin21Pas encore d'évaluation
- TSTI Logarithme - Neperien DSDocument2 pagesTSTI Logarithme - Neperien DSCoulibaly IssoufPas encore d'évaluation
- Matlab CoursDocument33 pagesMatlab Coursmohammed hammoumiPas encore d'évaluation
- Tpe SNLDocument6 pagesTpe SNLdilanho takamPas encore d'évaluation
- Brochure ISEecoDocument13 pagesBrochure ISEecoLatif CamaraPas encore d'évaluation
- Produit Scalaire Dans Etude Analytique (2) - Applications-: CercleDocument8 pagesProduit Scalaire Dans Etude Analytique (2) - Applications-: CercleSolaimane HammouchPas encore d'évaluation
- MétrologieDocument9 pagesMétrologieOumarou KontaPas encore d'évaluation
- II) 1.méthode de Bissection (Dichotomie)Document4 pagesII) 1.méthode de Bissection (Dichotomie)chemistry pharmacetiquePas encore d'évaluation
- Résultats TD 4Document2 pagesRésultats TD 4Sébastien UrienPas encore d'évaluation
- Notre RapportDocument39 pagesNotre RapportOussema SlimenPas encore d'évaluation
- Mesure Cellule: Contraintes SurcarottageDocument10 pagesMesure Cellule: Contraintes SurcarottageAMOUZOUN ChristophePas encore d'évaluation
- 2015-16 Cours ALDocument128 pages2015-16 Cours ALϟ KaiZyX ϟPas encore d'évaluation
- Sys Ex Cor8 2Document6 pagesSys Ex Cor8 2abdellah.jdarcPas encore d'évaluation
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsD'EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsPas encore d'évaluation
- 500 secrets pour avoir un potager merveilleuxD'Everand500 secrets pour avoir un potager merveilleuxÉvaluation : 2 sur 5 étoiles2/5 (1)
- Géologie de l'Amérique: Les Grands Articles d'UniversalisD'EverandGéologie de l'Amérique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Jus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTD'EverandJus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTPas encore d'évaluation
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)