Vous aimerez peut-être aussi
- Cahier D'algorithmique Avec AlgoboxDocument16 pagesCahier D'algorithmique Avec AlgoboxvinblanPas encore d'évaluation
- tp2 Ci3 Doshydro PDFDocument12 pagestp2 Ci3 Doshydro PDFÕůśśmãŞįmőPas encore d'évaluation
- TD4 Stabilité SolutionDocument3 pagesTD4 Stabilité SolutionSàmi BmPas encore d'évaluation
- Labo Science 64 La Dissection D Un Oeil de MammifereDocument5 pagesLabo Science 64 La Dissection D Un Oeil de MammifereSami213dz NarcosPas encore d'évaluation
- Presentation 10 04 30 PDFDocument10 pagesPresentation 10 04 30 PDFHechmi ChermitiPas encore d'évaluation
- TP STATIQUE-tp1Document4 pagesTP STATIQUE-tp1Faci DnfPas encore d'évaluation
- Seance1 Traction Elastique PDFDocument8 pagesSeance1 Traction Elastique PDFnadaPas encore d'évaluation
- Utilisation Du Solveur D'excel PDFDocument6 pagesUtilisation Du Solveur D'excel PDFAnes MansourPas encore d'évaluation
- TP Maxpid Hacheur PDFDocument14 pagesTP Maxpid Hacheur PDFoumaima arbiPas encore d'évaluation
- CI9 2 CapsuleuseDocument8 pagesCI9 2 CapsuleuseNessPas encore d'évaluation
- Projet Matlab0607S2Document8 pagesProjet Matlab0607S2Feno RamanantsoaPas encore d'évaluation
- Etude Cinématique Du Bras de Robot Maxpid: I. ContexteDocument6 pagesEtude Cinématique Du Bras de Robot Maxpid: I. ContexteSiwar MbarekPas encore d'évaluation
- Tp1 STR Bonlougou & DaDocument23 pagesTp1 STR Bonlougou & DaPaul BonlougouPas encore d'évaluation
- Mines MP 2007 SIDocument5 pagesMines MP 2007 SIFares MentseurPas encore d'évaluation
- VCDocument8 pagesVCiboussaPas encore d'évaluation
- EPANET Est Un Logiciel de Simulation Du Comportement Hydraulique Et Qualitatif de LDocument13 pagesEPANET Est Un Logiciel de Simulation Du Comportement Hydraulique Et Qualitatif de LKhaoula Zefane100% (1)
- TP4 Simulation Comportement DroneDocument12 pagesTP4 Simulation Comportement DroneRock AsmaePas encore d'évaluation
- TD1 Structure Et Performances Des Systemes AsservisDocument10 pagesTD1 Structure Et Performances Des Systemes AsservisWillybrood FonckPas encore d'évaluation
- TP ANSYs PDFDocument38 pagesTP ANSYs PDFYoussef Amhine100% (3)
- TP_6axesDocument12 pagesTP_6axesYassir ElantriPas encore d'évaluation
- TP 1Document10 pagesTP 1Med Hacen MoustaphaPas encore d'évaluation
- Auro1a1 TPDocument5 pagesAuro1a1 TPMed Ramy Gaddem EssefiPas encore d'évaluation
- Rapport Pgrand Projet PDFDocument25 pagesRapport Pgrand Projet PDFBourrasPas encore d'évaluation
- CC Composanst ProgrammablesDocument1 pageCC Composanst Programmablesvictor fonkouPas encore d'évaluation
- MCC 3sigma - Série 4 HACHEUR PDFDocument6 pagesMCC 3sigma - Série 4 HACHEUR PDFPenda NiassPas encore d'évaluation
- TD5 Chaines de SolidesDocument3 pagesTD5 Chaines de SolidesLoic GomaPas encore d'évaluation
- Modélisation D'une Machine Asynchrone Sous Matlab en Vue Sa Commande PDFDocument37 pagesModélisation D'une Machine Asynchrone Sous Matlab en Vue Sa Commande PDFGUESSOUMA100% (1)
- Article 17525Document8 pagesArticle 17525Zouhir AmakranePas encore d'évaluation
- Auro1a1 TPDocument5 pagesAuro1a1 TPchahid abdellahPas encore d'évaluation
- M2 EPSA GD2E S10 EtudeDeSystemes2Document2 pagesM2 EPSA GD2E S10 EtudeDeSystemes2arbibatmaPas encore d'évaluation
- L3-MI - 2022 - Automatique 3 - TDN4 - MatlabDocument1 pageL3-MI - 2022 - Automatique 3 - TDN4 - MatlabarcPas encore d'évaluation
- TP Sans FilDocument6 pagesTP Sans FilaymenayariPas encore d'évaluation
- 6115 Enonce Verin 6 AxesDocument6 pages6115 Enonce Verin 6 AxesMohammed RedPas encore d'évaluation
- Rapport Identifecation NaitaliDocument11 pagesRapport Identifecation NaitaliEl GhafraouiPas encore d'évaluation
- DVB S2Document10 pagesDVB S2Alloula AlaePas encore d'évaluation
- TP2 CapteursDocument4 pagesTP2 Capteursyoussef_dablizPas encore d'évaluation
- Examen_Rattrapage_automatiqueDocument2 pagesExamen_Rattrapage_automatiqueAchrafPas encore d'évaluation
- CORRIGE EXAMENJanvier2017Document4 pagesCORRIGE EXAMENJanvier2017Sel Ma100% (1)
- Chapitre 01 CFDDocument4 pagesChapitre 01 CFDنضالہٰ يٰونايٰتہٰدPas encore d'évaluation
- TP 4Document2 pagesTP 4Omar AmriPas encore d'évaluation
- TP Spe Serie 2 3 Structurel Dynamique GaletDocument2 pagesTP Spe Serie 2 3 Structurel Dynamique GaletAlexandre LamPas encore d'évaluation
- S3 TP1 MaxpidDocument4 pagesS3 TP1 MaxpidSiwar MbarekPas encore d'évaluation
- Article 101Document8 pagesArticle 101Charo CassPas encore d'évaluation
- Série de TD #02Document5 pagesSérie de TD #02zachazet100% (1)
- e3c-spe-sciences-ingenieur-premiere-03880-sujet-officielDocument10 pagese3c-spe-sciences-ingenieur-premiere-03880-sujet-officiellucaspouplard100Pas encore d'évaluation
- Devoir TractionDocument11 pagesDevoir TractionOunaies Mohamed100% (1)
- TPB03 C Recochiffres MasterSIDocument5 pagesTPB03 C Recochiffres MasterSIDjimramadji JosuéPas encore d'évaluation
- 01 DS PT 2020 2021 SujetDocument10 pages01 DS PT 2020 2021 Sujets.benzekri.04Pas encore d'évaluation
- Comm2 JET12 ELAJRAMI ABSDocument9 pagesComm2 JET12 ELAJRAMI ABSHonore herisoaPas encore d'évaluation
- TP3 MSD Système en TreillisDocument11 pagesTP3 MSD Système en Treillisحليمة حفيضيPas encore d'évaluation
- TP1Document11 pagesTP1kuetecedric0Pas encore d'évaluation
- TP - Outil de Simulation MATLABDocument17 pagesTP - Outil de Simulation MATLABRaphael RAKOTOARIVELOPas encore d'évaluation
- TP1 - CFDDocument14 pagesTP1 - CFDSalah ChPas encore d'évaluation
- 4845-projet-1-reconceptionDocument2 pages4845-projet-1-reconceptionBRAHIMPas encore d'évaluation
- Algobox Fiche 1Document6 pagesAlgobox Fiche 1Amine Oeega100% (1)
- Rapport 20-SimDocument9 pagesRapport 20-SimElnBEKKARYPas encore d'évaluation
- 4 6028548841219820033Document35 pages4 6028548841219820033nassima abdelaliPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Aide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesD'EverandAide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesPas encore d'évaluation
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- LES MACROS AVEC GOOGLE SHEETS: Programmer en JavascriptD'EverandLES MACROS AVEC GOOGLE SHEETS: Programmer en JavascriptPas encore d'évaluation
- PSI1 MathsDocument8 pagesPSI1 MathsIlyas MhammediPas encore d'évaluation
- CNC Si Tsi Ge 2016Document18 pagesCNC Si Tsi Ge 2016Monsif monsifPas encore d'évaluation
- Examens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFDocument10 pagesExamens Exercices Astuces Tous Ce Que Vous Voulez Compteurs Exercices Corriges TP Bascule JK 1 PDFIlyas MhammediPas encore d'évaluation
- UPSTI Corrige CCP TSI 2016 TelesiegeDebrayableDocument9 pagesUPSTI Corrige CCP TSI 2016 TelesiegeDebrayableTheKing 68Pas encore d'évaluation
- 9248 16siscnc1Document19 pages9248 16siscnc1Ilyas MhammediPas encore d'évaluation
- COMAXDocument5 pagesCOMAXIlyas MhammediPas encore d'évaluation
- Arthron RobotDocument2 pagesArthron RobotIlyas MhammediPas encore d'évaluation
- 8779 Sciences de Ingenieur S 2016Document23 pages8779 Sciences de Ingenieur S 2016AFADPas encore d'évaluation
- Onduleurs REDDocument14 pagesOnduleurs REDIlyas MhammediPas encore d'évaluation
- 04 Electrocinetique Regimes Transitoires PDFDocument8 pages04 Electrocinetique Regimes Transitoires PDFRiad TifaPas encore d'évaluation
- Algebre Lineaire 2020Document109 pagesAlgebre Lineaire 2020Ilyas MhammediPas encore d'évaluation
- Chapitre 2 ConceptionDocument103 pagesChapitre 2 ConceptionRaed BrayekPas encore d'évaluation
- TD Diagramme de BodeDocument5 pagesTD Diagramme de BodeIlyas MhammediPas encore d'évaluation
- 2015 TH Sammour Hussein PDFDocument122 pages2015 TH Sammour Hussein PDFAchraf AlaouiPas encore d'évaluation
- 21 SeptembreDocument34 pages21 SeptembreProfesseur De MATHSPas encore d'évaluation
- MP MATHS MINES 1 2016.extraitDocument4 pagesMP MATHS MINES 1 2016.extraitIlyas MhammediPas encore d'évaluation
- PT 2018-2019 21-09-2018 Devoir Surveille #1Document21 pagesPT 2018-2019 21-09-2018 Devoir Surveille #1Ilyas MhammediPas encore d'évaluation
- CNC Si Tsi GM 2018 CGDocument6 pagesCNC Si Tsi GM 2018 CGIlyas MhammediPas encore d'évaluation
- 05 TDs Logique CombinatoireDocument18 pages05 TDs Logique CombinatoireIlyas MhammediPas encore d'évaluation
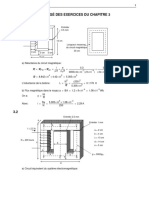
- Corrige Des Exercices Du Chapitre 3 3 1Document15 pagesCorrige Des Exercices Du Chapitre 3 3 1Ilyas MhammediPas encore d'évaluation
- Etude Dynamique D'un Circuit Magnétique Non Linéaire: March 2005Document7 pagesEtude Dynamique D'un Circuit Magnétique Non Linéaire: March 2005Ilyas MhammediPas encore d'évaluation
- Ex 02 STS1 ElectromagnetismeDocument28 pagesEx 02 STS1 ElectromagnetismeIlyas MhammediPas encore d'évaluation
- Chapitre 1Document87 pagesChapitre 1Ilyas MhammediPas encore d'évaluation
- Ex 02 STS1 ElectromagnetismeDocument28 pagesEx 02 STS1 ElectromagnetismeAbdelbaki Elfahem100% (3)
- 2018 Les Rivages UrbainsDocument51 pages2018 Les Rivages UrbainsIlyas MhammediPas encore d'évaluation
- Les Appareils MagnétoélectriqueDocument22 pagesLes Appareils MagnétoélectriqueAnonymous MWy9YAF30100% (2)
- 96 Ssi Sujet Zero Version 1Document37 pages96 Ssi Sujet Zero Version 1Ilyas MhammediPas encore d'évaluation
- Baccalauréat Scientifique Épreuve de Sciences de L'ingénieurDocument23 pagesBaccalauréat Scientifique Épreuve de Sciences de L'ingénieurIlyas MhammediPas encore d'évaluation
- 96 Ssi Sujet Zero Version 2 Bonne CopieDocument12 pages96 Ssi Sujet Zero Version 2 Bonne CopieIlyas MhammediPas encore d'évaluation
- TP1 Reflexion RefractionDocument3 pagesTP1 Reflexion Refractionfafoulol100% (1)
- DC3 4ScT (09-10)Document9 pagesDC3 4ScT (09-10)Wagih MrassiPas encore d'évaluation
- Numenéra - Guide Du JoueurDocument66 pagesNumenéra - Guide Du JoueurLe Chasseur0% (1)
- La Généralité Sur La Compensation de Puissance RéactiveDocument24 pagesLa Généralité Sur La Compensation de Puissance RéactiveChakib ZendaguiPas encore d'évaluation
- Synthese RDMDocument7 pagesSynthese RDMfd_haslerPas encore d'évaluation
- Trigonometrie 2scDocument4 pagesTrigonometrie 2scmathcomPas encore d'évaluation
- Remplir Et Boucher Grafcet Et Programmation EleveDocument10 pagesRemplir Et Boucher Grafcet Et Programmation EleveursulaahoulahouPas encore d'évaluation
- Fiche Autorisation Travail XavierDocument1 pageFiche Autorisation Travail XavierMercelatPas encore d'évaluation
- These JCQDocument159 pagesThese JCQMed larbi MustaphaPas encore d'évaluation
- l2 Geomorphologie 2014 - 2015Document94 pagesl2 Geomorphologie 2014 - 2015BTI YokotaPas encore d'évaluation
- TP 1: Incertitudes de MesureDocument6 pagesTP 1: Incertitudes de Mesuremmm aaPas encore d'évaluation
- Chapitre 16-RéservoirsDocument40 pagesChapitre 16-Réservoirsreve abdoPas encore d'évaluation
- 02 CHAPITRE 1 La Pollution HarmoniquesDocument6 pages02 CHAPITRE 1 La Pollution HarmoniquesYass561Pas encore d'évaluation
- Hecht-PhysiqueDocument30 pagesHecht-PhysiqueadrienscaleaPas encore d'évaluation
- TD Dualité 2021Document2 pagesTD Dualité 2021AYMANE JAMAL100% (1)
- Technologie en Automatismes Industriels PDFDocument122 pagesTechnologie en Automatismes Industriels PDFnada100% (2)
- PH5 Oscillations Mécaniques LibresDocument17 pagesPH5 Oscillations Mécaniques LibresMouhamed Ali SahbaniPas encore d'évaluation
- CHAPITRE 3 Les Transformations IntegralesDocument33 pagesCHAPITRE 3 Les Transformations IntegralesIshak KETTAFPas encore d'évaluation
- 1 e Dictionnaire 2Document3 pages1 e Dictionnaire 2hend boussaadaPas encore d'évaluation
- Transparents Opto 2ENDocument53 pagesTransparents Opto 2ENmounaPas encore d'évaluation
- THE-LAST-DOCDocument29 pagesTHE-LAST-DOCyoussef joynerPas encore d'évaluation
- Nombres ComplexespDocument14 pagesNombres ComplexespHouria DinariPas encore d'évaluation
- Chapitre - I ElectrotechniqueDocument56 pagesChapitre - I ElectrotechniqueMaroua SederPas encore d'évaluation
- Intra Été 2021Document5 pagesIntra Été 2021Mohamed AmmouriPas encore d'évaluation
- IPhO LANDRAUD Cours Electricité Partie 1 IPHO 2018Document28 pagesIPhO LANDRAUD Cours Electricité Partie 1 IPHO 2018Yassine RiahiPas encore d'évaluation
- Cor SerieDocument19 pagesCor SerieDescartes VergezPas encore d'évaluation
- Dalle PleineDocument6 pagesDalle PleineBedoui AmeniPas encore d'évaluation
- TP7 Mesure de La Tension SuperficielleDocument4 pagesTP7 Mesure de La Tension SuperficielleAbde TamPas encore d'évaluation