Vous aimerez peut-être aussi
- Rapport Du Projet TechniqueDocument34 pagesRapport Du Projet TechniqueJacintho MPETEYEPas encore d'évaluation
- Cours ALIDocument9 pagesCours ALIFARCHASKY 888Pas encore d'évaluation
- Exercice Corrigés D'engrenages - Construction MécaniqueDocument7 pagesExercice Corrigés D'engrenages - Construction MécaniqueEmmanuel TchouyaPas encore d'évaluation
- Rapport Pompe HydrauliqueDocument13 pagesRapport Pompe Hydrauliqueharoldminko0Pas encore d'évaluation
- Parametrage Des Systemes MecaniquesDocument13 pagesParametrage Des Systemes MecaniquesAdam MoallaPas encore d'évaluation
- Arbre de ReducteurDocument3 pagesArbre de ReducteurhassankchPas encore d'évaluation
- TP 1 MDFDocument9 pagesTP 1 MDFbouchPas encore d'évaluation
- 01 Exercice EngrenageDocument4 pages01 Exercice EngrenageEl Hâfÿîdÿî KamelPas encore d'évaluation
- Chapitre 4 EngrenagesDroitsDocument20 pagesChapitre 4 EngrenagesDroitsKaram QaoubPas encore d'évaluation
- Cristall o Graph I eDocument15 pagesCristall o Graph I eWPas encore d'évaluation
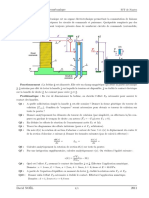
- David NOËL - TD de RDM - Relais ÉlectromagnétiqueDocument1 pageDavid NOËL - TD de RDM - Relais ÉlectromagnétiqueCesaire DanPas encore d'évaluation
- Examen MDF (GBI - S2 - Sep - 2020)Document1 pageExamen MDF (GBI - S2 - Sep - 2020)Soumia AOBAD100% (1)
- Schema Cinematique CoursDocument4 pagesSchema Cinematique CoursRihabBelgadaPas encore d'évaluation
- Statique - Exercices Divers ELEVEDocument2 pagesStatique - Exercices Divers ELEVEOussama ZagharPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- Cnc-Chimie-Mp-19999a CorrigéDocument7 pagesCnc-Chimie-Mp-19999a CorrigéAz-eddine KaibaPas encore d'évaluation
- Compte Rendu de La MDFDocument9 pagesCompte Rendu de La MDFAbdelhak Ait OumhaPas encore d'évaluation
- Capitre 4 Mdf-ConvertiDocument9 pagesCapitre 4 Mdf-ConvertiLina alikh100% (1)
- Examen - Ratrapage 2016 +correctionDocument2 pagesExamen - Ratrapage 2016 +correctionBen FahPas encore d'évaluation
- DS2 1Document5 pagesDS2 1Braxt MwIra GibecièrePas encore d'évaluation
- Exo 8 Batteur A HouleDocument4 pagesExo 8 Batteur A HouleDABAKH LDEEBOYPas encore d'évaluation
- Série 03Document5 pagesSérie 03Dadiom AbdouPas encore d'évaluation
- SN°1MD Fluides SMP (S6) SMC (S4)Document6 pagesSN°1MD Fluides SMP (S6) SMC (S4)rachida lakaazPas encore d'évaluation
- Semestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtDocument9 pagesSemestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtAbdelali YacoubiPas encore d'évaluation
- Corrigé - TD - Liaison de Roue de Réducteur-Vis FinalDocument4 pagesCorrigé - TD - Liaison de Roue de Réducteur-Vis FinalIkram El JamaiPas encore d'évaluation
- Sujet 2 Mécanique Du Point, Rattrapage Du Semestre 1, L1PCSM 2021-2022Document1 pageSujet 2 Mécanique Du Point, Rattrapage Du Semestre 1, L1PCSM 2021-2022محمد لمين قريشPas encore d'évaluation
- Rapport Alternateur (Autosaved) (Recovered)Document22 pagesRapport Alternateur (Autosaved) (Recovered)RabbiPas encore d'évaluation
- TRAVAUX DIRIGES N°1 Réaction Acido-BasiqueDocument3 pagesTRAVAUX DIRIGES N°1 Réaction Acido-BasiqueAlex N'zue100% (1)
- Chapitre IIDocument9 pagesChapitre IIabdouPas encore d'évaluation
- Transformateurs Monophasés Correction Des Exercices III, IV Et VDocument7 pagesTransformateurs Monophasés Correction Des Exercices III, IV Et VBoutairPas encore d'évaluation
- MHDDocument6 pagesMHDAbdessemed FouziPas encore d'évaluation
- TD2-mécanique Des Fluides-2013Document23 pagesTD2-mécanique Des Fluides-2013SALEHPas encore d'évaluation
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
- TD1 - CorrectionDocument19 pagesTD1 - Correctionfrançois lutorPas encore d'évaluation
- Devoir 1esaDocument6 pagesDevoir 1esasb aliPas encore d'évaluation
- TD M2 - 1Document12 pagesTD M2 - 1Aziz DinarPas encore d'évaluation
- Théorie Mecanismes Etude de Cas-MaxpidDocument25 pagesThéorie Mecanismes Etude de Cas-MaxpidMerv Bouda100% (1)
- TDDocument14 pagesTDYassir Ez-znafryPas encore d'évaluation
- Projet MMC UCAODocument2 pagesProjet MMC UCAOnarcisse100% (1)
- TD Eq2Document5 pagesTD Eq2Lÿnçrë Mërss DoriPas encore d'évaluation
- Correction Fiche TD 1Document8 pagesCorrection Fiche TD 1Oussama DellaaPas encore d'évaluation
- TD Chap V - Tuyère Simple - Gaz ParfaitDocument5 pagesTD Chap V - Tuyère Simple - Gaz ParfaitMathilde MimiPas encore d'évaluation
- Contenu Régime PolyphaséDocument1 pageContenu Régime PolyphaséGbah KONE100% (1)
- 16 Statique Degré Dhyperstatisme Exemples de CalculDocument1 page16 Statique Degré Dhyperstatisme Exemples de CalculDialseny Dalaba100% (1)
- Epreuve Maths II PSI CNC 2019Document4 pagesEpreuve Maths II PSI CNC 2019bensimo111999Pas encore d'évaluation
- Viscosite ExDocument4 pagesViscosite ExJulie PeliatePas encore d'évaluation
- Corrigé de La Série-MécafluDocument5 pagesCorrigé de La Série-MécafluDenis SuarezPas encore d'évaluation
- Cinematique Graphique CorrigeDocument11 pagesCinematique Graphique Corrigemoez.abdenadherPas encore d'évaluation
- TP HydDocument6 pagesTP HydKhaoula ZefanePas encore d'évaluation
- Cours 12Document5 pagesCours 12BalalaŇaŖîfPas encore d'évaluation
- Filtre A TambourDocument5 pagesFiltre A TambourAnonymous kxOcSmhc100% (1)
- 02 Principe Fondamental de La StatiqueDocument8 pages02 Principe Fondamental de La StatiqueMaman dan malan NasserPas encore d'évaluation
- Embrayage HydrocinetiqueDocument6 pagesEmbrayage HydrocinetiqueAmine MerwarPas encore d'évaluation
- Projet MATLAB - FFT, Ifft Et FftshiftDocument3 pagesProjet MATLAB - FFT, Ifft Et FftshiftsaritaPas encore d'évaluation
- Transmettre L Energie Mecanique Cours CompletDocument89 pagesTransmettre L Energie Mecanique Cours Completlaghmam.elmehdiPas encore d'évaluation
- TP Hydrolique 1 Version Prof 2Document13 pagesTP Hydrolique 1 Version Prof 2fatimazahraajabroukPas encore d'évaluation
- Semestre 1 Master: Fabrication Mé: IntituléDocument70 pagesSemestre 1 Master: Fabrication Mé: Intitulésamir ghebouliPas encore d'évaluation
- TD Cinématique-Sout - Concours 2024-CorrigéDocument4 pagesTD Cinématique-Sout - Concours 2024-Corrigédahbanyfi70Pas encore d'évaluation
- TD N°1 Robotique Industrielle 2021Document2 pagesTD N°1 Robotique Industrielle 2021Hocine BoukhiarPas encore d'évaluation
- TD18 CorrectionDocument8 pagesTD18 CorrectionHamza SadikPas encore d'évaluation
- Exercices Sur La Génération de L'énergie ÉlectriqueDocument2 pagesExercices Sur La Génération de L'énergie ÉlectriqueDimitri Valdes TchuindjangPas encore d'évaluation
- 02 - Tableau Convocation Session 2 - L3 Infocom - Semestre ImpairDocument2 pages02 - Tableau Convocation Session 2 - L3 Infocom - Semestre ImpairFeider FeiPas encore d'évaluation
- M Lemeire PDFDocument61 pagesM Lemeire PDFfg55930Pas encore d'évaluation
- Conception Et Étude D - Un PontDocument172 pagesConception Et Étude D - Un PontFerhat Outaleb100% (1)
- Chap 2 Les Extrudeuses 2020 EtudiantsDocument62 pagesChap 2 Les Extrudeuses 2020 EtudiantsElyess Ben Ahmed100% (1)
- Ensembles, Application 2 - 21-23Document4 pagesEnsembles, Application 2 - 21-23fbdbhdPas encore d'évaluation
- Histoire Révolution Industrielle: Objectif: Expliciter Les Notions D'artisanat Et D'industrieDocument7 pagesHistoire Révolution Industrielle: Objectif: Expliciter Les Notions D'artisanat Et D'industrieLuana PereiraPas encore d'évaluation
- Technologie D'électrotechnique, 2e Bac Pro: Livre Du Professeur Télécharger, Lire PDFDocument7 pagesTechnologie D'électrotechnique, 2e Bac Pro: Livre Du Professeur Télécharger, Lire PDFBrah SaminouPas encore d'évaluation
- 1956 Les Mysteres MajeursDocument0 page1956 Les Mysteres Majeursguynahas3845Pas encore d'évaluation
- Fiche Verifications MotoDocument2 pagesFiche Verifications MotoHabi GueyePas encore d'évaluation
- DM 1Document2 pagesDM 1Lotfi Ben MalekPas encore d'évaluation
- Bachelard - Margolin, Jean-ClaudeDocument242 pagesBachelard - Margolin, Jean-ClaudeAdel CherietPas encore d'évaluation
- 1presentation Les Rituels en MaternelleDocument57 pages1presentation Les Rituels en MaternelleOcellina Cps100% (3)
- L Ordre Dans Ir Cours Et Exercices CorrigesDocument8 pagesL Ordre Dans Ir Cours Et Exercices CorrigesHamza IDAISSAPas encore d'évaluation
- Travaux PratiqueDocument5 pagesTravaux PratiquerakolovaPas encore d'évaluation
- MR067 Bardage PDFDocument48 pagesMR067 Bardage PDFDjamila HaddiPas encore d'évaluation
- TD5-TP5 PythonVerFinaleDocument2 pagesTD5-TP5 PythonVerFinalehayat KIRATEPas encore d'évaluation
- Instrumentation Et Automatisation AECDocument2 pagesInstrumentation Et Automatisation AECMebrek SamirPas encore d'évaluation
- Charte Eco-ResponsableDocument2 pagesCharte Eco-Responsableapi-385648143Pas encore d'évaluation
- 2-Pursol MSDS FR PDFDocument14 pages2-Pursol MSDS FR PDFEl Hadi MohamedPas encore d'évaluation
- Tp2 Avec CorrectionDocument4 pagesTp2 Avec CorrectionABDOUBNPas encore d'évaluation
- Cours Complet PDFDocument136 pagesCours Complet PDFBilel WerghemmiPas encore d'évaluation
- Guide de Redaction PDFDocument45 pagesGuide de Redaction PDFidia.ouedraogo.2000Pas encore d'évaluation
- Conception ArchitecturaleDocument6 pagesConception ArchitecturaleYasmine KaraPas encore d'évaluation
- 8029 8039 Premium Deskphones Datasheet FRDocument2 pages8029 8039 Premium Deskphones Datasheet FRJalloul Jalloulo OPas encore d'évaluation
- Exam Materaux PDFDocument19 pagesExam Materaux PDFmaraghni_hassine7592Pas encore d'évaluation
- Chamoa P PsidaDocument112 pagesChamoa P PsidaHanaa DamiPas encore d'évaluation
- Exploitation de Texte 2 Ce2Document48 pagesExploitation de Texte 2 Ce2EULOGE KOULAIPas encore d'évaluation
- Memory FinalDocument93 pagesMemory FinalAllarassem NgamadjiPas encore d'évaluation