Vous aimerez peut-être aussi
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFSofiane Redjradj100% (1)
- Distribution Des Exercice Pour Le Devoir S PDFDocument4 pagesDistribution Des Exercice Pour Le Devoir S PDFManel Guesmi100% (2)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
- Distribution Des Exercice Pour Le Devoir S PDFDocument4 pagesDistribution Des Exercice Pour Le Devoir S PDFManel GuesmiPas encore d'évaluation
- Distribution Des Exercice Pour Le Devoir S PDFDocument4 pagesDistribution Des Exercice Pour Le Devoir S PDFManel Guesmi100% (3)
- Moteurs Electriques 01Document129 pagesMoteurs Electriques 01Slim SaloumPas encore d'évaluation
- 15 Load FlowDocument8 pages15 Load Flowmolodme380100% (1)
- CorrigeDocument26 pagesCorrigeCedricPas encore d'évaluation
- MA ROD 270 - Id-Nr.363559-92Document12 pagesMA ROD 270 - Id-Nr.363559-92pomsarexnbPas encore d'évaluation
- ZZ4554 - Altivar 312 SolarDocument2 pagesZZ4554 - Altivar 312 SolarSINES France100% (1)
- Materiel DPT GEDocument4 pagesMateriel DPT GEBoris FouotsapPas encore d'évaluation
- TD Etalonnage Des DébitmètresDocument6 pagesTD Etalonnage Des DébitmètresAyache KazoulaPas encore d'évaluation
- BMR MDFKDocument5 pagesBMR MDFKguesdonPas encore d'évaluation
- ZZ3957Document2 pagesZZ3957Merveil BorgeasPas encore d'évaluation
- Montageanleitung Instructions de Montage Instrucciones de MontajeDocument16 pagesMontageanleitung Instructions de Montage Instrucciones de MontajeDaniil AdPas encore d'évaluation
- LEG008011Document11 pagesLEG008011KouassiPas encore d'évaluation
- BL Lot3Document4 pagesBL Lot3Malick GueyePas encore d'évaluation
- CC 500 CabDocument2 pagesCC 500 CabHITIMAN-APas encore d'évaluation
- Dinamo MonofasicosDocument12 pagesDinamo MonofasicosChint BoliviaPas encore d'évaluation
- B 8025 F 220Document12 pagesB 8025 F 220Maya MayoshkaPas encore d'évaluation
- dv2 Compact Sales Documentations FR A2019Document2 pagesdv2 Compact Sales Documentations FR A2019BERANGER DAVESNE DJOMALIA SIEWEPas encore d'évaluation
- ZBE102 DATASHEET FR FR-FRDocument3 pagesZBE102 DATASHEET FR FR-FRBachir NasraouiPas encore d'évaluation
- TPs Machines HydrauliquesDocument18 pagesTPs Machines Hydrauliqueskader100% (3)
- Couplemetre Dynamique Sans Contact rt8Document2 pagesCouplemetre Dynamique Sans Contact rt8Anonymous 3mJfZEPas encore d'évaluation
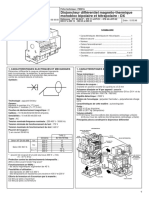
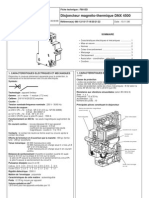
- Disjoncteurs Fiche TechniqueDocument8 pagesDisjoncteurs Fiche TechniqueAbdellah BennisPas encore d'évaluation
- Avm113 51365Document2 pagesAvm113 51365irbobyPas encore d'évaluation
- Fiche Technique Cable Unifilaire Rigide IngelecDocument2 pagesFiche Technique Cable Unifilaire Rigide IngelecFatima HamdiPas encore d'évaluation
- E510 Cuisine SERMES RevmDocument3 pagesE510 Cuisine SERMES RevmFlorent SeignezPas encore d'évaluation
- UCA-Rattrapages Touzet 2020Document4 pagesUCA-Rattrapages Touzet 2020rayane abbasPas encore d'évaluation
- Brandt Wte1271k 5x0614Document27 pagesBrandt Wte1271k 5x0614remikhaledPas encore d'évaluation
- Support Sujets GIM S3Document9 pagesSupport Sujets GIM S3Thierry BoulayPas encore d'évaluation
- Variateur de Vitesse C.A. Powerflex 4: Précautions GénéralesDocument12 pagesVariateur de Vitesse C.A. Powerflex 4: Précautions GénéralesRachid MoussaouiPas encore d'évaluation
- ABB1SAM201902R1004Document3 pagesABB1SAM201902R1004Moi AzouPas encore d'évaluation
- DISJ MIN HDB6s FRDocument2 pagesDISJ MIN HDB6s FRLassaad AlilaPas encore d'évaluation
- Modules de Perte Charge Singuliere, Coude, Vannes, Branchement, Hydraulique, Pression PDFDocument4 pagesModules de Perte Charge Singuliere, Coude, Vannes, Branchement, Hydraulique, Pression PDFichrakPas encore d'évaluation
- Caracteristiques_pompes_PHEDDocument16 pagesCaracteristiques_pompes_PHEDmawukokpeliPas encore d'évaluation
- Bilan PuissanceDocument73 pagesBilan PuissanceKaroum RiadPas encore d'évaluation
- 04 Dae TechniqueDocument25 pages04 Dae TechniqueHassan AbaPas encore d'évaluation
- F01204FR 02Document20 pagesF01204FR 02Rafael RuizPas encore d'évaluation
- FR Acs580-01 Qisg B B5Document16 pagesFR Acs580-01 Qisg B B5Abdallah MiidounePas encore d'évaluation
- Alternateurs - Alternators Alternateurs - Alternators: LSA 35 - 35 E LSA 35 - 35 EDocument11 pagesAlternateurs - Alternators Alternateurs - Alternators: LSA 35 - 35 E LSA 35 - 35 EOumar MandodjoPas encore d'évaluation
- KINGgates Book Manual FRDocument24 pagesKINGgates Book Manual FRmed taha hanfiPas encore d'évaluation
- Tour PDFDocument41 pagesTour PDFAhmed Ben HmidaPas encore d'évaluation
- Guide Rapide ATV930Document4 pagesGuide Rapide ATV930BrahimiPas encore d'évaluation
- TD N°1: Le ContacteurDocument6 pagesTD N°1: Le Contacteurrajakrifa100% (1)
- Auto-Electronisation de La Machine de Cacao.Document13 pagesAuto-Electronisation de La Machine de Cacao.Clement SaliPas encore d'évaluation
- Commande de MoteurDocument19 pagesCommande de MoteurAhmed RemaciPas encore d'évaluation
- Relais Ampermetrique Klixon Notice 00Document3 pagesRelais Ampermetrique Klixon Notice 00azertyquerty924Pas encore d'évaluation
- Relais Temporises Serie Essential 17 5 MM 1 Relais 5a Emar7 Ref 88829117Document3 pagesRelais Temporises Serie Essential 17 5 MM 1 Relais 5a Emar7 Ref 88829117coco MPPas encore d'évaluation
- Note de Calcul HAI AUTO CONS - VAR 1Document8 pagesNote de Calcul HAI AUTO CONS - VAR 1Karaluis MelisePas encore d'évaluation
- 1198d Fr-EnDocument11 pages1198d Fr-EnYvesnounounePas encore d'évaluation
- Comparatif CDCDocument1 pageComparatif CDCLucas LeonardoPas encore d'évaluation
- Preliminar Y: Convertisseur de Fréquence SMDDocument8 pagesPreliminar Y: Convertisseur de Fréquence SMDAbdelkader AbdelkaderPas encore d'évaluation
- RDT 405, 410: Régulateur Électronique Pour Des Applications Simples, Flexotron400Document9 pagesRDT 405, 410: Régulateur Électronique Pour Des Applications Simples, Flexotron400hito gamePas encore d'évaluation
- Servo Sous FlowcodeDocument10 pagesServo Sous Flowcodezouaoua slimanePas encore d'évaluation
- Motor OperatorDocument8 pagesMotor OperatoralexwingerPas encore d'évaluation
- HE-HER-DE00-E-DT052 - Relais de Puissance MiniatureDocument6 pagesHE-HER-DE00-E-DT052 - Relais de Puissance Miniatureandrei belgiumPas encore d'évaluation
- Variateur Mot Asynchrone GEN4 Secon IUT Aisne PDFDocument32 pagesVariateur Mot Asynchrone GEN4 Secon IUT Aisne PDFhacene sedratiPas encore d'évaluation
- Domestique Rigide Basse Tension (BT) 300/500 V & 450/750 V: H0 5 V - U/H0 7 V - U/H0 7 V - RDocument2 pagesDomestique Rigide Basse Tension (BT) 300/500 V & 450/750 V: H0 5 V - U/H0 7 V - U/H0 7 V - RWajih KlaaPas encore d'évaluation
- Fusionné 20231126 1230Document16 pagesFusionné 20231126 1230Blaise NjifonPas encore d'évaluation
- Test PlanDocument3 pagesTest PlanLIONN SOFTWARES100% (1)
- 1001 CircuitsDocument62 pages1001 CircuitsTomás PachecoPas encore d'évaluation
- Evaluation PER17Document80 pagesEvaluation PER17chabi oscar100% (1)
- Resistors - Et - Loi - D - Ohm - Exercices 2Document4 pagesResistors - Et - Loi - D - Ohm - Exercices 2Jessym HarrathPas encore d'évaluation
- Resume Cours Circuits ProgrammablesDocument100 pagesResume Cours Circuits ProgrammablesNouhaila GharradiPas encore d'évaluation
- Fiche Des Mesures de La Conductivité Thermique en Régime PermanentDocument4 pagesFiche Des Mesures de La Conductivité Thermique en Régime PermanentKhadijetou Mohamedou Sidi ElmeheboubePas encore d'évaluation
- DatasheetDocument5 pagesDatasheetEduardo SanchezPas encore d'évaluation
- Altivar 71Document108 pagesAltivar 71Martin Yauri CaceresPas encore d'évaluation
- TD2 - Lp3er S3 - 20-21-1Document2 pagesTD2 - Lp3er S3 - 20-21-1ya OuPas encore d'évaluation
- Gamme CC: Convertisseurs de Signaux AnalogiquesDocument26 pagesGamme CC: Convertisseurs de Signaux Analogiquesاشر اقPas encore d'évaluation
- Moteur Dahlander 2 Vitesses 1 Sens de RotationDocument2 pagesMoteur Dahlander 2 Vitesses 1 Sens de RotationSalah SalahPas encore d'évaluation
- Datasheet ZCS 1PH 1100 3300TL V3 FRDocument2 pagesDatasheet ZCS 1PH 1100 3300TL V3 FRHoussem KhelilPas encore d'évaluation
- Devis Cyber KaraDocument4 pagesDevis Cyber KaraMs Linux100% (3)
- As TablesDocument4 pagesAs TablesATzavarlaw100% (1)
- 4 Crcuit Resonnant-FiltrageDocument7 pages4 Crcuit Resonnant-FiltrageJade VidPas encore d'évaluation
- CR TP2Document6 pagesCR TP2Islam SadadouPas encore d'évaluation
- Circuits Et Puissance en TriphaséDocument6 pagesCircuits Et Puissance en TriphaséSaidPas encore d'évaluation
- Fiche BB37000Document9 pagesFiche BB37000Aurelien031Pas encore d'évaluation
- rapport-PFE-MARIEM-2 (1) Finale2Document73 pagesrapport-PFE-MARIEM-2 (1) Finale2firas timoumiPas encore d'évaluation
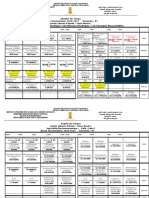
- Emploi de Temps (M1) S1-Génie Électrique - 2020-2021Document7 pagesEmploi de Temps (M1) S1-Génie Électrique - 2020-2021Abderrahim ZemmitPas encore d'évaluation
- 1 Er Chapitre Réseau BTDocument23 pages1 Er Chapitre Réseau BTNi halPas encore d'évaluation
- Correction Exam 15 Mars 2012Document2 pagesCorrection Exam 15 Mars 2012Marwan MoroPas encore d'évaluation
- Filtrage Analogique - Partie2Document19 pagesFiltrage Analogique - Partie2lasri lasriPas encore d'évaluation
- Allumage Moteur À EssenceDocument12 pagesAllumage Moteur À EssenceYacouba OuedraogoPas encore d'évaluation
- Comment Lire Votre FactureDocument3 pagesComment Lire Votre FactureMostapha HamdaouiPas encore d'évaluation
- Construire Un Émetteur FM Expérimental - ZonetronikDocument5 pagesConstruire Un Émetteur FM Expérimental - ZonetronikOthmane MadaniPas encore d'évaluation
- 25 I-E Td-CorrigeDocument4 pages25 I-E Td-CorrigeAyman KenPas encore d'évaluation
- ERDFDocument6 pagesERDFderma coolPas encore d'évaluation
- Reglages DisjoncteursDocument50 pagesReglages DisjoncteursdsfPas encore d'évaluation