Vous aimerez peut-être aussi
- Term S Fonctions TrigonometriquesDocument8 pagesTerm S Fonctions Trigonometriquesasaliah koudelakassaPas encore d'évaluation
- Fourier - Reconstitution D'un Signal Périodique - CoursDocument22 pagesFourier - Reconstitution D'un Signal Périodique - CoursFrançois PRAUDPas encore d'évaluation
- Exercice: Ecole Supérieure de Comptabilité Et de Finances de Constantine Série TD 2020/2021 1Document22 pagesExercice: Ecole Supérieure de Comptabilité Et de Finances de Constantine Série TD 2020/2021 1Mêry ÊmPas encore d'évaluation
- Poly Analyse 1 RDocument86 pagesPoly Analyse 1 Rzah eraPas encore d'évaluation
- Corrigé TD3 - 2021 2022Document13 pagesCorrigé TD3 - 2021 2022saidihakima87Pas encore d'évaluation
- Prosit 3 Bloc 3 Léo GeeraertDocument10 pagesProsit 3 Bloc 3 Léo Geeraertleogee13Pas encore d'évaluation
- Carte Mémoire Tle D-2Document125 pagesCarte Mémoire Tle D-2Aida Mbodji90% (20)
- 20 Trigo TDocument10 pages20 Trigo TSerge TshimangaPas encore d'évaluation
- Fonctions Exponentielles Cours 2Document7 pagesFonctions Exponentielles Cours 2Amine SemlaliPas encore d'évaluation
- Chapitre 2 - Varietes Et Coordonnees Geometrie I-1Document8 pagesChapitre 2 - Varietes Et Coordonnees Geometrie I-1hessoul100% (1)
- Formulaire de Trigonométrie 2021-2022Document2 pagesFormulaire de Trigonométrie 2021-2022Brahim MbarekPas encore d'évaluation
- Corrigé - Série de T.D. N°2 Du TS 521Document7 pagesCorrigé - Série de T.D. N°2 Du TS 521Ryad SenhadjiPas encore d'évaluation
- Formulario Calculo Integral CematDocument1 pageFormulario Calculo Integral CematSuria AndradePas encore d'évaluation
- MECA2 - Révisions - Fiche - MéthodesDocument5 pagesMECA2 - Révisions - Fiche - Méthodessalmaamane68Pas encore d'évaluation
- Corrigé Ex 20 Et 23Document1 pageCorrigé Ex 20 Et 23anaPas encore d'évaluation
- Trigonometrie PDFDocument6 pagesTrigonometrie PDFShayma HammamiPas encore d'évaluation
- Développements Limités - JC DucheinDocument8 pagesDéveloppements Limités - JC DucheinGabriel MautréPas encore d'évaluation
- Correction Exo 9, 10, 11Document4 pagesCorrection Exo 9, 10, 11Alassane SowPas encore d'évaluation
- GO-TD1 - CorrigéDocument13 pagesGO-TD1 - CorrigéMajd RasimPas encore d'évaluation
- Formules TrigonometriquesDocument8 pagesFormules Trigonometriquesbarryhamadounallaye1Pas encore d'évaluation
- Solution D'exercice: A) B) A) B) C) D)Document3 pagesSolution D'exercice: A) B) A) B) C) D)adil kasmiPas encore d'évaluation
- TD01 TNS 2021 SolDocument8 pagesTD01 TNS 2021 SolfatiPas encore d'évaluation
- Fomulaire MathsDocument8 pagesFomulaire MathsManel BendahiPas encore d'évaluation
- C - Maths@Tle D - CHAP II TRIGONOMETRIEDocument23 pagesC - Maths@Tle D - CHAP II TRIGONOMETRIEKAMBOU JULESPas encore d'évaluation
- Exponentielle 1Document2 pagesExponentielle 1aminintPas encore d'évaluation
- Logique Mathematique Serie Dexercices 1Document2 pagesLogique Mathematique Serie Dexercices 1saidighir94Pas encore d'évaluation
- PHY169 LP-CTT Devoir 2019-2020Document3 pagesPHY169 LP-CTT Devoir 2019-2020JoPas encore d'évaluation
- TP Asymptotes - Branches Infinies - SuitesDocument3 pagesTP Asymptotes - Branches Infinies - SuitestravisdamisPas encore d'évaluation
- Examen Blanc Maths 2bac Eco SGC Juin 2020 Sujet FRDocument3 pagesExamen Blanc Maths 2bac Eco SGC Juin 2020 Sujet FRAbdellah DaoudiPas encore d'évaluation
- TrigonometrieDocument2 pagesTrigonometrieAnge NiaziPas encore d'évaluation
- Champ Électrostatique Créé Par Un CondensateurDocument2 pagesChamp Électrostatique Créé Par Un CondensateurInes MahjoubPas encore d'évaluation
- ProjetDocument19 pagesProjetAntoine RahalPas encore d'évaluation
- Semaine 8Document8 pagesSemaine 8Kpabou KpabouPas encore d'évaluation
- Formules Des Dérivées Et PrimitivesDocument3 pagesFormules Des Dérivées Et PrimitivesCarine TchassaPas encore d'évaluation
- Solution Examen 20-2 1Document3 pagesSolution Examen 20-2 1FaroukPas encore d'évaluation
- Formule TrigonometrieDocument1 pageFormule TrigonometrieMihaiPas encore d'évaluation
- Points Cours - Mouvement Dans Un Champ UniformeDocument6 pagesPoints Cours - Mouvement Dans Un Champ UniformesocranedeoufPas encore d'évaluation
- Chapitre 3 Elec. Version Du 10 Mars PDFDocument38 pagesChapitre 3 Elec. Version Du 10 Mars PDFsixdelav76Pas encore d'évaluation
- Projet Automatique HASSISSENE MENEZDocument27 pagesProjet Automatique HASSISSENE MENEZsonia hassissenePas encore d'évaluation
- AMAS Chap5Document26 pagesAMAS Chap5ÏŠłãm Ould ChikhPas encore d'évaluation
- Chapitre 3 - Fonctions UsuellesDocument4 pagesChapitre 3 - Fonctions UsuellesСаломея ЕяPas encore d'évaluation
- Traqueur Du Soleil (Corrigé)Document5 pagesTraqueur Du Soleil (Corrigé)bhasalma220Pas encore d'évaluation
- Examene Physique 03 VF 2022Document5 pagesExamene Physique 03 VF 2022Omar LANGEURPas encore d'évaluation
- Nombres Complexes PDFDocument15 pagesNombres Complexes PDFDiomande WilfriedPas encore d'évaluation
- Modélisation MathématiqueDocument5 pagesModélisation MathématiqueMohammed Amine MajdoubPas encore d'évaluation
- Derivee Et Primitive-ConvertiDocument1 pageDerivee Et Primitive-ConvertiAmadou TraoréPas encore d'évaluation
- Sas Correction Bts Blanc MatsDocument5 pagesSas Correction Bts Blanc MatsStessy LokoPas encore d'évaluation
- Ta4 Fonction ExponentielleDocument4 pagesTa4 Fonction ExponentielleCrepin BAKATRAPas encore d'évaluation
- Solutions - Exercices - Antennes AvancéesDocument15 pagesSolutions - Exercices - Antennes AvancéesNtissar OutariPas encore d'évaluation
- Corrigé 05 PDFDocument2 pagesCorrigé 05 PDFEl Kamoun AminePas encore d'évaluation
- Tableau Transformees de LaplaceDocument2 pagesTableau Transformees de LaplaceANDAHMOUPas encore d'évaluation
- DM 3 - CorrigéDocument9 pagesDM 3 - Corrigéclementdufau5e6Pas encore d'évaluation
- Ta4 Fonction LogarithmeDocument4 pagesTa4 Fonction LogarithmeCrepin BAKATRAPas encore d'évaluation
- 2equations Et Inequations Exercices Non Corriges 1 MaDocument1 page2equations Et Inequations Exercices Non Corriges 1 Madohach24Pas encore d'évaluation
- Moment CinétiqueDocument16 pagesMoment CinétiqueDora BoraPas encore d'évaluation
- MDF - TD2 CorrigéDocument4 pagesMDF - TD2 Corrigéhamza maaroufiPas encore d'évaluation
- UEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Document29 pagesUEF611 Chapitre 3 Analyse Dans Lespace Détat Des Systèmes 2020Arrow ArrowPas encore d'évaluation
- MaaathDocument56 pagesMaaathdmg49cz2vjPas encore d'évaluation
- TD11 1Document3 pagesTD11 1Med FilaliPas encore d'évaluation
- Rep-Contôle N°01 - TCPI - 2016-2017Document2 pagesRep-Contôle N°01 - TCPI - 2016-2017Med FilaliPas encore d'évaluation
- TD10Document17 pagesTD10Med FilaliPas encore d'évaluation
- Catalogue Logiciels 2014Document32 pagesCatalogue Logiciels 2014Med FilaliPas encore d'évaluation
- Mécanismes Vitesses Et Accélération - Lois Entrée/sortie: Liaisons ÉquivalentesDocument7 pagesMécanismes Vitesses Et Accélération - Lois Entrée/sortie: Liaisons ÉquivalentesMed FilaliPas encore d'évaluation
- TCP-05-Projection-Orthogonale P 44Document1 pageTCP-05-Projection-Orthogonale P 44Med FilaliPas encore d'évaluation
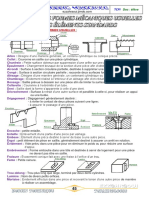
- TCP-06-Terminologies Formes P 45-51Document7 pagesTCP-06-Terminologies Formes P 45-51Med FilaliPas encore d'évaluation
- ClasseurTP1 Niveau 1Document6 pagesClasseurTP1 Niveau 1Med FilaliPas encore d'évaluation
- CPI2-INDUS-TD-cotation GPS Verin LVMDocument5 pagesCPI2-INDUS-TD-cotation GPS Verin LVMMed FilaliPas encore d'évaluation
- ANALYSE DESCENDANT (Ex)Document4 pagesANALYSE DESCENDANT (Ex)Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 4Document3 pagesLa Loi D Ohm Cours 4Med FilaliPas encore d'évaluation
- La Loi D Ohm Corrige Serie D Exercices 1Document5 pagesLa Loi D Ohm Corrige Serie D Exercices 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 1Document7 pagesLa Loi D Ohm Cours 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Serie D Exercices 1Document3 pagesLa Loi D Ohm Serie D Exercices 1Med Filali100% (1)
- La Loi D Ohm Cours 2Document4 pagesLa Loi D Ohm Cours 2Med FilaliPas encore d'évaluation
- La Loi D Ohm Exercices Non Corriges 1Document1 pageLa Loi D Ohm Exercices Non Corriges 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 3Document8 pagesLa Loi D Ohm Cours 3Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 6Document2 pagesLa Loi D Ohm Cours 6Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 5Document3 pagesLa Loi D Ohm Cours 5Med FilaliPas encore d'évaluation
- 03 Astrologie 21 Noel 2009 PDFDocument61 pages03 Astrologie 21 Noel 2009 PDFChristophe Garnier100% (1)
- Cours de Tracage Classe de Seconde CHDocument40 pagesCours de Tracage Classe de Seconde CHfokou.simplicegmail.com Fokou SimplicePas encore d'évaluation
- 13 Exo Elect Solution Cours PHY104 2020 2021Document29 pages13 Exo Elect Solution Cours PHY104 2020 2021Isaacar Moye la SouzaPas encore d'évaluation
- Info Semestre 1 BDocument16 pagesInfo Semestre 1 BMed AhmedPas encore d'évaluation
- S411 Analyse Des Mecanismes 4Document7 pagesS411 Analyse Des Mecanismes 4angamaPas encore d'évaluation
- 3 Cocody Master 1 Gestion, 2020 2021, Corrige de La Fiche de TD N°Document5 pages3 Cocody Master 1 Gestion, 2020 2021, Corrige de La Fiche de TD N°OUMAR OUATTARAPas encore d'évaluation
- Simulation Et Optimisation Des Procédés TechnologiquesDocument11 pagesSimulation Et Optimisation Des Procédés TechnologiquesSamakitka Martina0% (1)
- Benmansour - El Houmri - Commande Scalaire Et VectorielleDocument32 pagesBenmansour - El Houmri - Commande Scalaire Et VectoriellekaoutharPas encore d'évaluation
- TP002 Jamaltikouk Id1Document12 pagesTP002 Jamaltikouk Id1Jam MuslimPas encore d'évaluation
- PFC 3°gcDocument3 pagesPFC 3°gcKarimPas encore d'évaluation
- Controle Gestion PDFDocument107 pagesControle Gestion PDFMohammed TahtouhPas encore d'évaluation
- Lubrification HydrodynamiqueDocument101 pagesLubrification HydrodynamiqueSmail Lebbal100% (1)
- Chap5 - Cours Si ImbriquéeDocument2 pagesChap5 - Cours Si ImbriquéeAwalo MohamedPas encore d'évaluation
- TD4 MémoireDocument2 pagesTD4 MémoireŽặ Íŋặß0% (2)
- Exercices FractionsDocument4 pagesExercices FractionsDavid SelossePas encore d'évaluation
- Marc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Document495 pagesMarc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Erick TetsadjioPas encore d'évaluation
- Les Sous ProgrammesDocument5 pagesLes Sous ProgrammesHm Walid100% (2)
- Chapitre Ii Variables, Constantes, Types Et ExpressionsDocument13 pagesChapitre Ii Variables, Constantes, Types Et ExpressionsFabrice DjegouePas encore d'évaluation
- Mouvements Et TrajectoiresDocument1 pageMouvements Et TrajectoiresbmmostefaPas encore d'évaluation
- Master Rannou PDFDocument95 pagesMaster Rannou PDFRabii MontaPas encore d'évaluation
- TD1 CRC CorrectionDocument5 pagesTD1 CRC CorrectionWij Dan100% (1)
- Page 204 205,206Document12 pagesPage 204 205,206amigorena.baptiste91Pas encore d'évaluation
- Graphes D IntervallesDocument8 pagesGraphes D IntervallesMustapha JaballahPas encore d'évaluation
- Cours CircuitDocument46 pagesCours CircuitousmanePas encore d'évaluation
- Complement GC23Document10 pagesComplement GC23Magloire KajidPas encore d'évaluation
- 2f3906da4622e725a807ece1813149b4Document64 pages2f3906da4622e725a807ece1813149b4leaderdreamerPas encore d'évaluation
- TP N°4 TorsionDocument7 pagesTP N°4 TorsionKIYOMI FFPas encore d'évaluation
- Chap7 Echantillonnage Estimation Ponctuelle (2) - CopieDocument23 pagesChap7 Echantillonnage Estimation Ponctuelle (2) - CopieDavila AlomgbaPas encore d'évaluation
- TD4 CorrectionDocument15 pagesTD4 CorrectionistaitosPas encore d'évaluation
- Curriculum Vitae Yasni - MounirDocument1 pageCurriculum Vitae Yasni - MounirNadir BouazzaPas encore d'évaluation