Vous aimerez peut-être aussi
- 8 Automate ProgrammableDocument63 pages8 Automate Programmableelectrotecnia_tvpcPas encore d'évaluation
- Automate ProgrammableDocument62 pagesAutomate ProgrammableFou FoufaPas encore d'évaluation
- Etat de L'artDocument9 pagesEtat de L'artAbdoul Bagui YaoubaPas encore d'évaluation
- Cours - API - Partie IIDocument41 pagesCours - API - Partie IIAkram BENACHOURPas encore d'évaluation
- Automate Programmable IndustrielDocument6 pagesAutomate Programmable IndustrielAbdessamad HajjiPas encore d'évaluation
- Automate Programmable Industriel IntroductionDocument8 pagesAutomate Programmable Industriel IntroductionAdel Haddad HauntedPas encore d'évaluation
- Presentation Automate ProgrammableDocument21 pagesPresentation Automate ProgrammableAmine100% (1)
- Automatisme Avec Siemens APIDocument90 pagesAutomatisme Avec Siemens APImedmalekPas encore d'évaluation
- 2 - Automates ProgrammablesDocument30 pages2 - Automates ProgrammablesAbir KhrissPas encore d'évaluation
- Automate ProgramableDocument71 pagesAutomate ProgramableDida Dadal0% (1)
- Automate Programmable Industrielle SIMENSDocument23 pagesAutomate Programmable Industrielle SIMENSIkràm Zerki57% (7)
- Cour Step7 PDFDocument60 pagesCour Step7 PDFAhmed Hamada80% (10)
- Formation SurDocument104 pagesFormation SurBadr Dlala75% (4)
- Automatisme de PlusDocument7 pagesAutomatisme de PlusAlaealeaPas encore d'évaluation
- Automate Programmable Industriel PLCDocument26 pagesAutomate Programmable Industriel PLCSebastien PaulPas encore d'évaluation
- Exercice Automate Programmable PDFDocument2 pagesExercice Automate Programmable PDFDre33% (12)
- L'automate ProgrammableDocument10 pagesL'automate ProgrammableRadouan ManPas encore d'évaluation
- Step7 7Document60 pagesStep7 7Imane BenidderPas encore d'évaluation
- Le GEMMA PDFDocument25 pagesLe GEMMA PDFYoussefDiddaPas encore d'évaluation
- Automates Programmables IndustrielsDocument32 pagesAutomates Programmables Industrielssumororo100% (1)
- Introduction Aux Systèmes Automatisés de ProductionDocument30 pagesIntroduction Aux Systèmes Automatisés de ProductionAmine Ait Elaasri100% (4)
- EEA602 - Automatismes Industriels Cours I+II PDFDocument43 pagesEEA602 - Automatismes Industriels Cours I+II PDFalkassoum100% (1)
- Formation Tia STEP7Document7 pagesFormation Tia STEP7Hamadi Ben SassiPas encore d'évaluation
- TP1 Tapis Profibus VariateurDocument7 pagesTP1 Tapis Profibus Variateurjmroussel100% (2)
- CTIA06 - Programmation Des Automates S7-300 - Les Blocs D'organisation (OB) PDFDocument9 pagesCTIA06 - Programmation Des Automates S7-300 - Les Blocs D'organisation (OB) PDFErwanDouguetPas encore d'évaluation
- SLC500 User ManuelDocument712 pagesSLC500 User ManuelFitas Mounir100% (2)
- Cours Autom LPAIIDocument65 pagesCours Autom LPAIIElmokh LassaadPas encore d'évaluation
- LadderDocument6 pagesLadderBadreddine Tiss100% (2)
- Cours APIs7&8Document108 pagesCours APIs7&8Fa Rachid100% (2)
- SiemensDocument13 pagesSiemensanisonfirePas encore d'évaluation
- Cours Automatismes Industrielsv2 Chapitres 123456Document47 pagesCours Automatismes Industrielsv2 Chapitres 123456プリンス モハメッドPas encore d'évaluation
- Pfe AutomatisationDocument28 pagesPfe AutomatisationKa Bi50% (6)
- Cours RLIDocument174 pagesCours RLIMohamed Ayed100% (1)
- M - 28 - Câblage D'un Automate ProgrammableDocument62 pagesM - 28 - Câblage D'un Automate ProgrammableHîChàmBàQàs100% (3)
- Le Grafcet G7Document66 pagesLe Grafcet G7Anonymous dR83ohhqPas encore d'évaluation
- Cours Automatisme Première PartieDocument32 pagesCours Automatisme Première PartieRabbiPas encore d'évaluation
- Formation TIADocument81 pagesFormation TIAHamadi Ben Sassi100% (3)
- Régulation Par Step 7Document64 pagesRégulation Par Step 7Мхамед Аит Абдерахман100% (3)
- TIA Formation CPU 315-2DPDocument23 pagesTIA Formation CPU 315-2DPМхамед Аит АбдерахманPas encore d'évaluation
- Cours Automatisme 2015Document49 pagesCours Automatisme 2015anasPas encore d'évaluation
- 19 RegulationDocument11 pages19 RegulationAli Toumi SiefPas encore d'évaluation
- Chapitre III Les Automates Programmables Industriels 201718Document12 pagesChapitre III Les Automates Programmables Industriels 201718KadiPas encore d'évaluation
- Objectif Step7 Chapitre 4Document14 pagesObjectif Step7 Chapitre 4Jacques NjohPas encore d'évaluation
- L'automate s7 400Document3 pagesL'automate s7 400fethiya0% (1)
- Supervision Master2018Document115 pagesSupervision Master2018Fatima zahra RaissouniPas encore d'évaluation
- ProjetttDocument66 pagesProjetttWafa Afsa100% (3)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Cours APIs ESA2Document17 pagesCours APIs ESA2Nek Moussa100% (1)
- Cours Commande SequentielleDocument128 pagesCours Commande SequentiellepythagoretenkamPas encore d'évaluation
- LES AUTOMATES PROGRAMMABLES (Notes de Cours)Document17 pagesLES AUTOMATES PROGRAMMABLES (Notes de Cours)Youness RabahPas encore d'évaluation
- Chapitre IIIDocument18 pagesChapitre IIISalhi BahaPas encore d'évaluation
- Chapitre 1Document11 pagesChapitre 1Aimen KerkoudPas encore d'évaluation
- Chap 5Document31 pagesChap 5Maryem SãhlãøûîPas encore d'évaluation
- 3 Programmation Des AutomatesDocument54 pages3 Programmation Des AutomatesHamed Assan100% (1)
- Chapitre 1Document78 pagesChapitre 1Anis YanisPas encore d'évaluation
- API GénéralitéDocument6 pagesAPI GénéralitéboutalibzinebPas encore d'évaluation
- Automatique: Les Automates Programmables Industriels (API)Document30 pagesAutomatique: Les Automates Programmables Industriels (API)Louis TabiPas encore d'évaluation
- Architecture D Un SAPDocument36 pagesArchitecture D Un SAPAziz ZizouPas encore d'évaluation
- Automate Programmable PDFDocument62 pagesAutomate Programmable PDFElkhalil OunarhiPas encore d'évaluation
- Compte Rendu de TP de Logique ProgrammableDocument23 pagesCompte Rendu de TP de Logique ProgrammableYayoune Kholio100% (1)
- TPE Fondamentaux de LANDocument61 pagesTPE Fondamentaux de LANkamdem bocheng joelPas encore d'évaluation
- Chapitre 2 Analyse Synthese Systeme Asservis Lineaire Abaque Nichols BlackDocument5 pagesChapitre 2 Analyse Synthese Systeme Asservis Lineaire Abaque Nichols BlackMed Raslene AlouiPas encore d'évaluation
- Synchronisation PDFDocument29 pagesSynchronisation PDFMouradElmatadorPas encore d'évaluation
- Chapitre 2Document14 pagesChapitre 2satima omPas encore d'évaluation
- Chapitre 6 La Gestion Des Fichiers PDFDocument8 pagesChapitre 6 La Gestion Des Fichiers PDFaminou mohamadouPas encore d'évaluation
- CASTEL - Fiche Produit - XE ALARME - Version ANTI AGRESSIONDocument2 pagesCASTEL - Fiche Produit - XE ALARME - Version ANTI AGRESSIONyannis tardivelPas encore d'évaluation
- Bialan Energetique Salle ServeurDocument2 pagesBialan Energetique Salle ServeurActu MaketPas encore d'évaluation
- TP OpenvpnDocument5 pagesTP OpenvpnAhmed BendahmanePas encore d'évaluation
- WifiDocument14 pagesWifiJovan EpohPas encore d'évaluation
- Chapitre1 Travaux Davant-ProjetDocument5 pagesChapitre1 Travaux Davant-ProjetÑar ĎjesPas encore d'évaluation
- Gestion Des Entrees Et SortiesDocument51 pagesGestion Des Entrees Et SortiesTegra KmdPas encore d'évaluation
- Cours API MII SembarquésDocument40 pagesCours API MII SembarquésGabbianimarcoPas encore d'évaluation
- MémoireDocument77 pagesMémoirebouzi100% (1)
- Cours Programmation VariablesDocument61 pagesCours Programmation Variablesihsen gasmiPas encore d'évaluation
- TP7modulation DémodulationDocument8 pagesTP7modulation DémodulationHicham Ait SellamPas encore d'évaluation
- Cloud Computing Sécurité, Gouvernance Du SI Hybride Et Panorama Du Marché (Plouin, Guillaume)Document285 pagesCloud Computing Sécurité, Gouvernance Du SI Hybride Et Panorama Du Marché (Plouin, Guillaume)Giresse KazadiPas encore d'évaluation
- Cours PHPDocument106 pagesCours PHPkaiggiakPas encore d'évaluation
- Référentiel D'installation 9500MPR OCIDocument120 pagesRéférentiel D'installation 9500MPR OCINshom Elis GwanfogbePas encore d'évaluation
- 1-GLSI3-Intro CS SocketsDocument40 pages1-GLSI3-Intro CS Socketsfab fabPas encore d'évaluation
- Interconnexion de Deux Sites Distants (DHCP-OSPF-HSRP)Document11 pagesInterconnexion de Deux Sites Distants (DHCP-OSPF-HSRP)khawla.benhalla.5Pas encore d'évaluation
- C4-Heritage Et PolymorphismeDocument31 pagesC4-Heritage Et PolymorphismeReda AsriPas encore d'évaluation
- Configuration Requise Pour AutoCAD 2024 Including Specialized ToolsetsDocument1 pageConfiguration Requise Pour AutoCAD 2024 Including Specialized ToolsetsrajtarPas encore d'évaluation
- Debian Perferique Wifi BroadcomDocument4 pagesDebian Perferique Wifi BroadcomSouleymane TraorePas encore d'évaluation
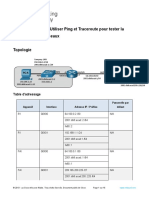
- 13.3.2 Lab - Use Ping and Traceroute To Test Network ConnectivityDocument16 pages13.3.2 Lab - Use Ping and Traceroute To Test Network ConnectivityPape FayePas encore d'évaluation
- Examen 1617Document3 pagesExamen 1617Loic GannoPas encore d'évaluation
- Act 4.1Document5 pagesAct 4.1Zied kallel50% (6)
- Installation de GLASSFISH Sun Application ServerDocument6 pagesInstallation de GLASSFISH Sun Application ServerSaadi BadisPas encore d'évaluation
- TD Canal Propagation Licence Prof TA CorrectionDocument4 pagesTD Canal Propagation Licence Prof TA CorrectionYoussef Jamma3Pas encore d'évaluation
- CTFL Syllabus 2018 FR PDFDocument96 pagesCTFL Syllabus 2018 FR PDFagunaou2102Pas encore d'évaluation
- Exposé Technique de Transùission Numérique TOUKAMDocument9 pagesExposé Technique de Transùission Numérique TOUKAMFabrice leonel Toukam PoualeuPas encore d'évaluation