Académique Documents
Professionnel Documents
Culture Documents
Modeles Plastiques Thesis
Transféré par
Ernest NsabimanaCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Modeles Plastiques Thesis
Transféré par
Ernest NsabimanaDroits d'auteur :
Formats disponibles
COLE CENTRALE DES ARTS ET
MANUFACTURES
COLE CENTRALE PARIS
THSE
prsente par
Alexandre FOUCAULT
pour l'obtention du
GRADE DE DOCTEUR
Spcialit : Mcanique
Modlisation du comportement cyclique des oura!es
en terre int!rant des tec"niques de r!ularisation
Soutenue le #$ %uin #&$& deant un %ury compos de :
'en C(AM)O* +rsident
'obert C(A'L,-' 'apporteur
+"ilippe M-STAT 'apporteur
Fernando LO+-./CA)ALL-'O -xaminateur
Fran0ois 1OL2O,'- -xaminateur
Ar3ou MO2A'-SS, FA'A(MA*2/'A.A1, 2irectrice de t"4se
+"ilippe 5OLMA6-' ,nit
T"4se prpare con%ointement :
Laboratoire de Mcanique des Sols7 Structures et Matriaux7 C*'S UM' 89:;
Laboratoire de Mcanique des Structures ,ndustrielles 2urables7 UM' -2F<C*'S #8=#
2partement Analyses Mcaniques et Acoustique de l'-2F '>2
#&$&/-CA+&&$9
#
=
Remerciements
?e pro@ite de cette pa!e pour marquer un point @inal A ce manuscrit et A ma ie
d'tudiant7 et par la mBme occasion remercier l'ensemble des personnes qui m'ont
aid7 !uid et encoura! durant ces trois annes de t"4seC
Cette t"4se C,F'- a t ralise entre le Laboratoire de Mcanique des Sols7
Structures et Matriaux de lD-cole Centrale +aris et le dpartement d'Analyses
Mcaniques et Acoustique de -2F '>2C
?e dbute ces remerciements en exprimant ma !ratitude A Claude 'ospars7 !rEce A
qui ce pro%et de t"4se a pu oir le %our pour moi A la @in de l't #&&FC Merci de
m'aoir contact et o@@ert l'opportunit de dbuter cette tr4s belle aenture "umaine
et scienti@iqueC
2e plus7 %e remercie iement les deux personnes en c"ar!e de mon encadrement:
Ar3ou Modaressi7 directrice de t"4se7 et Fran0ois 1oldoire7 encadrant industriel du
dpartement d'Analyses Mcaniques et Acoustique de -2F '>2C Merci pour la
con@iance que ous m'ae3 accorde7 les c"an!es r!uliers au cours de la t"4se
et les mt"odes de traail inculquesC C'est en partie !rEce A ous7 os conseils7
otre soutien7 ent"ousiasme et pda!o!ie que %'ai pu traailler dans un
enironnement serein pour mener A bien ce traailC
Mes sinc4res remerciements se diri!ent A prsent ers les membres du %uryC
Ce @ut pour moi un !rand plaisir que 'en C"ambon prside mon %ury de t"4seC Ses
conseils et son intrBt au cours de ces annes ont t des @acteurs stimulants7
enric"issants et constructi@s pour l'aancement de mes traauxC
?e remercie aussi Messieurs 'obert C"arlier et +"ilippe Mestat d'aoir accept de
rapporter ce traail7 de lire mon manuscrit en pro@ondeur7 de l'aluer et de le
corri!er en partieC Leur ais scienti@ique et apprciations sur cette t"4se
m'encoura!ent A poursuire mes actiits au sein de la rec"erc"e scienti@iqueC
,l m'a @ait tr4s plaisir de compter +"ilippe 5olmayer parmi les membres du %uryC Ses
conseils7 sa ision des probl4mes traits et son intrBt pour la science m'ont
beaucoup apports lors de nos discussions pour orienter mon traail ers les
besoins du Centre d',n!nierie (ydraulique de -2FC
Merci A Fernando Lope3/Caballero d'aoir accept de participer A ce %ury de t"4seC
?'ai beaucoup apprci notre collaboration7 ses conseils aiss lorsque %e le
sollicitais7 sa disponibilit et son en!a!ement pour m'aider A aancerC
?e remercie ensuite tr4s c"aleureusement tous les membres du Laboratoire
MSSMat aec qui les contacts ont tou%ours t amicaux et sympat"iques7
notamment Francis Armand7 2enis Aubry7 2idier Clouteau7 '!is Cottereau7 +ierre
-esque7 Mad"ia (attab7 Gilbert Le Gal7 Anne/Sop"ie Mouronal7 *ad4!e Ols CCC
Les bons moments parta!s ont contribu !randement A cette ambiance !nrale
des plus a!rablesC ?'exprime ma !ratitude particuli4re eners tous mes coll4!ues
H
doctorants : 'ac"ele Allena7 G"i3lane )enosman7 So@ia Costa d'A!uiar7 Amlie Fau7
Ana +atricia Gaspar7 Tammam (ammad7 Sa"ar (emmati7 Cristian *ieto/Gamboa7
-steban Sae37 Maryam TabbaI""a et -lsa 1ennatC
Mes penses ont !alement A l'ensemble du personnel du dpartement d'Analyses
Mcaniques et Acoustique de -2F '>2 pour m'aoir accueilli et permis de raliser
ce traail dans des conditions matrielles et "umaines des plus apprciablesC ?e
remercie notamment 1incent Guyonar" pour son soutien et la con@iance qu'il m'a
accorde tout au lon! du pro%etC J!alement7 une pense particuli4re pour Marc
5"am et 'omo Fernandes pour toute l'aide qu'ils ont su m'apporter durant la
t"4seC ?e remercie aussi tous ceux qui ont contribu de pr4s ou de loin A ce pro%et:
MicIaKl Abbas7 Aimery Assire7 Laurent )illet7 Clment C"aant7 Mat"ieu Courtois7
T"omas 2e So3a7 Geor!es 2eesa7 C"ristop"e 2urand7 ?oumana -l/G"arib7
,sabelle Fournier7 1incent Godard7 Sylie Granet7 *icolas Gre@@et7 +atricI Massin7
?acques +ellet7 ?ean/Mic"el +roix7 Fran0ois LaecIelCCC sans oublier les membres du
LaMS,2 aec qui %'ai parta! plus que de simples ca@s: Marion Allayrac7 Op"lie
An!lini7 ?rMme )eaurain7 ?ulien )erland7 2aniele Colombo7 Sam Cuillier7
Frdric 2aude7 Andr ?aubert7 'omain Lacombe et Mo"amed TorI"aniC
?'adresse mes remerciements les plus sinc4res A tous les membres de ma @amille :
parents7 N beaux/parents O7 @r4re7 N beau/@r4re et belle/soeur O7 cousins pour
m'aoir soutenu et paul durant ces annes de t"4seC -n@in7 ma !ratitude la plus
!rande se diri!e ers T"aPs7 ma @uture pouse7 pour son soutien7 sa
compr"ension7 son aide et sa patience tout au lon! de ces annesC
9
Rsm
L'ob%ecti@ tec"nique ma%eur de cette t"4se se rapporte au deloppement d'un outil
de simulation numrique @iable et robuste adapt A la maQtrise et la connaissance du
@onctionnement mcanique des oura!es !otec"niquesC Cet outil de simulation doit
notamment permettre une maQtrise des scnarii les plus pnalisants pour leur tenue7
notamment sous l'ala sismiqueC
La qualit des rsultats d'un tel outil dans le cadre de la mt"ode des lments @inis
est @onction du mod4le de comportement utilis7 de la qualit de l'int!ration du
mod4le et de sa rsolution numriqueC 2ans le cadre de ce traail7 le mod4le
lastoplastique de comportement cyclique des sols de l'-C+ Rdit de (u%euxS a t
introduit dans CodeTAster selon un sc"ma d'int!ration implicite7 permettant ainsi
une reprsentation @ine et prcise des p"nom4nes mis en %eu durant l'ala
sismiqueC Ce mod4le poss4de !alement l'aanta!e d'Btre adapt au comportement
de di@@rents types de sols dans le cadre des milieux poreux sous l'"ypot"4se des
petites d@ormationsC Apr4s alidation sur des c"emins de c"ar!ement aris7 le
mod4le est A prsent utilis pour la simulation de la construction par couc"es7 de la
mise en eau et de la tenue sismique de barra!es en terreC
Le caract4re non standard et adoucissant de ce mod4le conduit A mettre en oeure
des tec"niques de r!ularisation pour rsoudre le probl4me de dpendance
pat"olo!ique des rsultats aux mailla!es lors de l'apparition de modes de ruine
localiseC Le mod4le de second !radient de dilatation est utilis en complment au
mod4le de comportement de (u%eux pour contrMler la lar!eur des bandes de
localisation apparaissant sur les structures tudiesC La prise en compte d'une
cinmatique enric"ie permet de rendre ob%ecties aux mailla!es les rponses des
structures durant leur p"ase d'adoucissement mais n'instaure pas l'unicit des
solutions aux probl4mes poss suite aux instabilitsC 2ans le cadre d'essais
biaxiaux drains sur des matriaux dilatants exprims au sein des milieux du
second !radient de dilatation7 il est apparu une dpendance de la lar!eur des
bandes de cisaillement A l'tat de contraintes initial en plus des proprits des
matriauxC
A partir d'un exemple analytique d'une bande de matriau cisaille7 cette
dpendance a pu Btre exprime7 compare et maQtrise en @onction des param4tres
de r!ularisation par rapport aux rsultats des simulations numriquesC L'extension
de cette approc"e A un cas de stabilit de pente sous c"ar!ement d'une @ondation
super@icielle a ensuite t entreprisC La dpendance des lar!eurs de bandes A l'tat
de contraintes initial est apparue comme un lment cl de la maQtrise du coupla!e
entre le mod4le de second !radient de dilatation et les mod4les de type Cam/ClayC
M!ts"c#s $ Comportement cyclique des sols7 sc"ma d'int!ration implicite7 milieu
du second !radient de dilatation7 essai biaxial drain7 stabilit de pente7 di!ue en
terre7 mod4le de (u%euxC
F
A%str&ct
T"e main tec"nical ob%ectie o@ t"is +"2 t"esis deals Uit" t"e deelopment o@ a soil
be"aior numerical toolC ,t s"ould be robust7 e@@icient and adapted to model t"e
mec"anical be"aior o@ !eotec"nical structures ReC!C embanIment damS under t"e
Uorst loadin! scenarii suc" eart"quaIesC
,n t"e @inite element met"od7 t"e quality results is directly linIed to t"e soil
constitutie model7 t"e inte!ration sc"eme and t"e numerical resolutionC ,n t"is +"2
T"esis7 t"e -C+ elastoplastic soil model is introduced in CodeTAster t"rou!" an
implicit sc"emeC An implicit sc"eme ensures to respect t"e t"eoretical @ormulation o@
t"e modelC T"e -C+ constitutie model is one o@ t"e models aailable in t"e
literature to represent t"e be"aiour o@ di@@erent Iinds o@ soils under cyclic loadin!s
and it is used since t"e 8&'s by "ydraulic en!ineers at -2FC ,t is expressed in terms
o@ e@@ectie stresses and in@initesimal strainsC T"e deelopments are alidated @or
laboratory tests in a lar!e scale o@ loadin! pat"sC On t"e ot"er "and7 t"e study o@ a
sand embanIment Uas per@ormed and compared to t"e results obtained Uit" t"e
@inite element so@tUare G-F2yn deeloped at -C+C
T"e -C+ model is based on a non/associated @loU rule and it is able to reproduce a
so@tenin! be"aiorC L"en s"ear bands occur in t"e structure7 t"ese properties lead
to a pat"olo!ical sensitiity o@ t"e results dependin! on t"e mes" si3eC T"ere@ore7 a
re!ulari3ation tec"nique "as to be used to circument t"is problem and to obtain
ob%ectie results Uit" respect to t"e mes"C T"e second !radient o@ dilation model is
t"us c"osen to be coupled to t"e -C+ model and in t"is Uay7 to ensure a spatio/
temporal independence o@ resultsC (oUeer7 t"is mes" independence still eoles in
a potential domain o@ solutions7 U"en instability occursC T"e simulations o@ drained
biaxial tests on laboratory samples s"oU a dependence o@ s"ear bands t"icIness in
re!ard to t"e initial stress state and material propertiesC
An analytical problem o@ a dilatant s"ear band is used to extract t"e Iey @actorsC
T"ese t"eoretical solutions are compared and alidated to numerical responses7
U"ic" are in !ood accordanceC A bearin! capacity problem Uas also soled to
demonstrate t"e potential o@ t"e met"odC T"e conclusion o@ t"is UorI establis"es t"e
main role o@ initial stress state oer t"e s"ear band t"icIness in t"e context o@ t"e
second !radient o@ dilation model and t"e models based on Cam/Clay approac"C
'e()!r*s $ soil cyclic be"aior model7 implicit sc"eme7 second !radient o@ dilation
model7 drained biaxial test7 bearin! capacity7 embanIment7 (u%eux modelC
:
T&%#e *es m&ti+res
$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;
$C$ Le contexte industrielCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;
$C# Le pro%et scienti@iqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;
$C= Le plan du mmoireCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&
# Modlisation du comportement des !omatriauxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=
#C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=
#C# JlasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H
#C= Jlasto/plasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$F
#CH Autres approc"esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##
#C9 'eue de mod4les existantsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=
#CF ,nt!ration des mod4les de comportement lastoplastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCC=H
#C: ConclusionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=8
= Formulation t"orique du mod4le de (u%eux R$;89SCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=;
=C$ 'elation de comportement de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=;
=C# 2@inition des ariables d'tat et expression de l'ner!ie libreCCCCCCCCCCCCCCCCCCCCCCCH$
=C= Mcanismes lasto/plastiques diatoiresCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCHH
=CH Mcanismes isotropesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9&
=C9 Traitement des tats de tractionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9H
=CF +aram4tres lastoplastiques du mod4leCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9H
H Mt"ode d'int!ration applique au mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9:
HC$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9:
HC# ,nt!ration de l'quation constitutie non linaire lastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCC98
HC= ,nt!ration des quations constituties lasto/plastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9;
HCH Tenseur lasto/plastique continuCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:9
HC9 +erspecties d'olutionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC::
9 1alidation numrique de l'implantation du mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:;
9C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:;
9C# Modlisation d'une colonne $2 de sol bi/p"asique saturCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8$
9C= Conclusion sur l'implantation du mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;=
F Stabilit et bi@urcations rencontres en mcanique des solsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;9
FC$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;9
FC# Jquations du probl4me aux limitesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;:
FC= Analyse !lobale de l'olution du syst4me mcaniqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&$
FCH Unicit et stabilit des solutions au nieau localCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&#
FC9 Jtude de la bi@urcation en bandes localisesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&F
FCF Conclusion sur les crit4res de stabilitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$#
FC: Microstructure et localisationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$#
FC8 Mt"odes de r!ularisationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$9
: Application de la t"orie du second !radient de dilatation CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#:
:C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#:
:C# Formulation t"orique du mod4le de second !radientCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#8
:C= Formulation numriqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$==
:CH Coupla!e aec le mod4le de (u%eux pour des matriaux dilatantsCCCCCCCCCCCCCC$=H
:C9 Jtude numrique d'un essai biaxial drainCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=;
:CF Jtude de stabilit d'un dblaiCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$8&
8 Conclusions !nrales et perspectiesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;$
; AnnexesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;=
;C$ 'elations entre les param4tres lastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;9
;C# Calcul analytique de la matrice tan!ente d'int!ration locale CCCCCCCCCCCCCCCCCCCCCC$;:
;C= -ssai cyclique induisant une rotation de l'tat de contraintesCCCCCCCCCCCCCCCCCCCCCC#&;
8
;CH -ssai biaxial drain sur sable d'(ostunCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#$=
;C9 -ssai triaxial non drain cycliqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##=
;CF -ssai de cisaillement aec micro/dc"ar!esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=9
;C: Modlisation d'une di!ue en terre aec le mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCC#=;
;C8 Analyse des syst4mes dynamiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#H:
;C; +erturbation de la suite des itrs de la mt"ode de *eUtonCCCCCCCCCCCCCCCCCCCCCC#99
;C$& Application du mod4le de second !radient olumique A la dynamiqueCCCCCC#9:
;C$$ Tenseur lastoplastique du mod4le (u%eux type Cam/Clay R(CCSCCCCCCCCCCCC#F:
;C$# 2omaine des directions instables selon le crit4re de 'iceCCCCCCCCCCCCCCCCCCCCCCCCC#F;
;C$= Simulation d'un essai biaxial drain sur sable d'(ostun A 2'VH&WCCCCCCCCCC#:$
;C$H Analyse de stabilit de pente aec la mt"ode des tranc"es de )is"opCCCC#::
$& )iblio!rap"ieCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#:;
$ ,ntroduction ;
, Intr!*cti!n
,-, Le c!nte.te in*strie#
Jlectricit de France7 en tant qu'exploitant d'oura!es "ydrauliques7 doit maQtriser la
conception7 l'expertise et la raluation de toutes les installations lies A la
production "ydrauliqueC Le pro%et7 dans lequel s'inscrit ce traail de t"4se7 a pour
ob%ecti@ de mettre A disposition du Centre d',n!nierie (ydraulique RC,(S un outil de
simulation numrique adapt A la maQtrise et la connaissance qualitatie et
quantitatie du @onctionnement mcanique des oura!es !otec"niquesC Les outils
de modlisation alids et calibrs sont deenus indispensables dans les dossiers
de suret relati@s aux oura!es dont -2F dtient la concessionC ,ls permettent de
maQtriser leur comportement sur les scnarios les plus pnalisants pour leur tenueC
Une des @inalits du pro%et consiste A tablir une mt"odolo!ie de simulation7 aec
le CodeTAster7 en dynamique Rsollicitations sismiquesS non linaire sur des
barra!es en terre7 apr4s aoir modlis leurs p"ases de construction et de mise en
eauC Les mod4les de comportement adapts A une reprsentation @ine des
p"nom4nes mis en %eu localement dans les sols7 notamment durant l'ala
sismique7 sont dcrits comme adoucissants Rdiminution des contraintes mal!r une
au!mentation des d@ormationsS7 c'est/A/dire capables de dtecter les p"nom4nes
de ruine de ces oura!esC La prdiction et l'extension de ces modes de ruine au
sein des structures tudies supposent de dtenir des mt"odes numriques
adaptesC
Le CodeTAster est l'outil de simulation numrique delopp par -2F pour
rpondre aux en%eux de sXret dans le domaine de la mcaniqueC Ce lo!iciel Open
Source a pour mission de capitaliser les traaux de rec"erc"e de -2F '>2 en lien
aec la mcanique et de @ournir des mt"odes d'analyse aances en mcanique
des solides et des structures7 int!rant les coupla!es aec d'autres p"ysiques
R"ydraulique7 t"ermique7 acoustiqueSC
Le traail de rec"erc"e labor dans cette t"4se est capitalis dans CodeTAsterC ,l
s'inscrit principalement dans le domaine de la !otec"nique et a comme ob%ecti@
d'assurer une @iabilit et une robustesse des calculs raliss sur les structures
ises Rbarra!es en terreSC
,-/ Le 0r!1et scienti2i3e
L'utilisation de mod4les de comportement p"nomnolo!ique dans le contexte des
milieux continus est une approc"e rationnelle pour la modlisation des oura!es
!otec"niquesC -n e@@et7 mal!r l'au!mentation croissante des moyens de calculs7
la conduite d'tudes numriques int!rant la micromcanique des milieux poreux
n'apparaQt pas encore adapte A l'c"elle des oura!esC 2ans le contexte de cette
approc"e7 la qualit des rsultats sera tou%ours @onction du mod4le de
comportement utilis7 mais !alement de la qualit de son int!ration et de sa
rsolution numriqueC La qualit de l'int!ration rside dans la robustesse des
mt"odes numriques7 leur e@@icacit et leurs per@ormances en temps de calculC
Le mod4le de comportement c"oisi est le mod4le lasto/plastique multi/
mcanismes de l'-C+ dit de (u%euxC Le c"oix d'une int!ration par sc"ma implicite
!arantit d'obtenir A coner!ence de la rsolution des rsultats en accord aec la
$& $C# Le pro%et scienti@ique
@ormulation t"orique du mod4le7 qui constitue un des ob%ecti@s ma%eurs de cette
t"4seC Le mod4le de (u%eux est un des mod4les les plus per@ormants7 surtout pour
la modlisation des c"ar!ements cycliques7 disponibles A l'"eure actuelleC ,l o@@re7 de
plus7 l'aanta!e de sa pratique dans l'in!nierie7 qui a permis d'tablir les
param4tres du mod4le pour de nombreux types de solsC
Ce mod4le7 comme prcis ci/dessus7 est capable de reprsenter le comportement
adoucissant du sol7 dans un cadre non standard !nralisC Le syst4me d'quations
associes au probl4me continu A rsoudre conduit A des instabilits @aorisant
l'apparition de 3ones A @orts !radients de d@ormations7 dont la lar!eur n'est pas
maQtriseC *umriquement7 dans le cadre de la mt"ode des lments @inis R)ato3
et 2"att R$;;&S7 .ienIieUic3 et alC R#&&9SS7 une dpendance pat"olo!ique des
rsultats aux mailla!es est constate en @onction de la @orme des lments7 la
discrtisation spatiale ou encore l'orientation des mailles pour ce type de mod4les
de comportementC Les 3ones de localisation de d@ormation se concentrent alors
ncessairement sur une bande d'une paisseur d'un lmentC Ce p"nom4ne
conduit7 pour un ra@@inement spatial de plus en plus @in7 A un mode de ruine ne
dissipant pas d'ner!ie7 ce qui n'est pas ralisteC
2es mt"odes numriques dites de r!ularisation existent pour corri!er ces
p"nom4nesC Le second ob%ecti@ de cette t"4se consiste ainsi A raliser
l'introduction du mod4le de (u%eux au sein d'une cinmatique de milieu continu
enric"ie par le second !radient de dilatation RFernandes R#&&87 #&&;aSSC Les
rsultats attendus de ce coupla!e sont d'obtenir des rsultats indpendants au
mailla!e A coner!ence7 tant pour des essais biaxiaux drains7 que pour des tudes
d'oura!es !otec"niques7 telle qu'une tude de stabilit de pente sous c"ar!ement
d'une @ondation super@icielleC
,-4 Le 0#&n * mm!ire
La premi4re partie de ce mmoire re!roupe les quatre premiers c"apitres du
documentC Le premier c"apitre propose d'abord un rappel de d@initions sur la
construction des mod4les lasto/plastiques pour ensuite prsenter une biblio!rap"ie
non ex"austie de mod4les p"nomnolo!iques reprsentati@s du comportement
des solsC -n @in de ce premier c"apitre7 les di@@rentes mt"odes d'int!ration
numriques disponibles dans la littrature sont !alement prsentesC
Le second et le troisi4me c"apitres s'attac"ent A dcrire de mani4re ex"austie le
mod4le lastoplastique de (u%eux et le sc"ma d'int!ration implicite adopt pour
l'implantation du mod4le dans le CodeTAster Rnotamment la !estion des
mcanismesSC Le quatri4me c"apitre a pour ob%et de prsenter les rsultats obtenus
aec le sc"ma d'int!ration implicite en comparaison d'un sc"ma explicite aec
sous/incrmentation pour des tra%ets aris de c"ar!ement "omo!4neC -n @in de
c"apitre7 l'tude en poro/mcanique de la construction par couc"es d'une colonne
de sol et de sa rponse sous un c"ar!ement sismique est prsente dans le but
d'aluer les capacits du sc"ma d'int!ration implicite sur une structure
!otec"nique classiqueC -n annexe7 se situent !alement les rsultats d'tudes
ralises aec le mod4le de (u%eux sous CodeTAster pour simuler la construction7
la mise en eau et un c"ar!ement sismique d'une di!ue en terre "omo!4neC
La deuxi4me partie de ce mmoire traite des di@@icults apparaissant lors de la
rsolution des quations du probl4me mcanique tudiC Les points soules
$ ,ntroduction $$
abordent les notions de stabilit des oura!es !otec"niques7 tels que les barra!es
en terre7 dont les rsultats sont prsents en annexe ;C: C L'analyse de la tenue
mcanique de ces oura!es peut se ramener A l'tude de stabilit de pente ou A la
dtection des modes de rupture potentielsC ,ls correspondent A de @ortes
discontinuits au sein du milieu7 produisant alors des !lissements de terrain de
!rande ampleur pilots par des bandes de cisaillement tr4s @ines en comparaison
des dimensions des structures tudiesC
Le c"apitre F prsente des lments d'analyse de la stabilit des solutions des
probl4mes aux limites rencontrs en mcanique des solsC Sous une ision
synt"tique et restreinte aux petites d@ormations7 les outils mat"matiques
permettant de caractriser les p"nom4nes mis en %eu localement et !lobalement A
l'c"elle des structures !otec"niques sont introduitsC Ce c"apitre permet de %usti@ier
le c"oix des crit4res d'apparition d'instabilits utiliss par la suite dans le cadre des
tudesC Lorsque le syst4me d'quations associ au probl4me aux limites tudi
deient mal pos7 un mode de rupture localis peut apparaQtre impliquant pour le
mod4le numrique une incapacit A prciser la lar!eur de la 3one A @orts
cisaillementsC 2i@@rentes approc"es t"oriques ou numriques permettant de pallier
ces di@@icults sont alors prsentes en @in de c"apitre7 ce qui conduit A %usti@ier la
@ormulation c"oisie dans ce traailC
Le c"apitre : prsente tout d'abord la t"orie des milieux de second !radient de
dilatation delopp par Fernandes R#&&;aS7 tendue aux quations de la
dynamique pour quanti@ier son e@@et sur la propa!ation des ondes dans le milieuC
-nsuite des applications numriques aec le mod4le de (u%eux enric"i par cette
cinmatique sont prsentesC Les ob%ecti@s consistent dans un premier temps A
aluer la capacit de cette approc"e A @ournir des rsultats ob%ecti@s par rapport A
la discrtisation spatiale7 puis caractriser la aleur des param4tres
supplmentaires introduits7 et @inalement quanti@ier en temps C+U la prise en
compte de cette approc"eC
Apr4s les conclusions et perspecties prsentes au c"apitre 8 7 di@@rents aspects
tec"niques sont documents en Annexes RY; SC
$# $C= Le plan du mmoire
# Modlisation du comportement des !omatriaux $=
/ M!*#is&ti!n * c!m0!rtement *es 5!m&tri&.
# Modlisation du comportement des !omatriauxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=
#C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=
#C# JlasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H
#C#C$ Jlasticit linaire isotrope de (ooIeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H
#C#C# Jlasticit non linaireCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$9
#C= Jlasto/plasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$F
#C=C$ +artition des d@ormations et relation incrmentale "ypolastiqueCCCCCCCC$:
#C=C# Sur@ace de c"ar!e et domaine d'lasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:
#C=C= Jcrouissa!eCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$8
#C=CH '4!le d'coulement plastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;
#C=C9 'elations incrmentales aec seuil plastique uniqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;
#C=CF 'elations incrmentales pour l'lasto/plasticit A potentiels multiplesC C C#&
#CH Autres approc"esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##
#CHC$ (ypoplasticitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##
#CHC# T"orie de la plasticit !nraliseCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##
#C9 'eue de mod4les existantsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=
#C9C$ Modlisation du comportement des sols !ranulairesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=
#C9C$C$ 'sultats exprimentauxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=
#C9C$C# Mod4les de comportementCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#9
#C9C# Modlisation du comportement des ar!ilesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#F
#C9C#C$ 'sultats exprimentauxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#F
#C9C#C# Jtat limite en compression isotropeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#:
#C9C#C= Jtat critique en compression triaxialeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#8
#C9C#CH Mod4les Cam/Clay et Cam/Clay modi@isCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#8
#C9C#C9 Limitations des mod4les de type Cam/ClayCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=&
#C9C#C9C$ Anisotropie des ar!iles naturellesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=&
#C9C#C9C# Comportement des ar!iles sous sollicitations cycliquesCCCCCCCCCC=&
#C9C= Mod4les de comportement uni@is CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=$
#C9C=C$ Mod4les A sur@ace limiteCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=#
#C9C=C# Mod4le de (u%eux R$;89SCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC==
#CF ,nt!ration des mod4les de comportement lastoplastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCC=H
#C: ConclusionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=8
/-, Intr!*cti!n
L'un des ob%ecti@s ma%eurs de ce traail de t"4se repose sur l'utilisation d'un mod4le
de comportement des sols7 adapt A la modlisation de di!ues en terre pour les
di@@rentes p"ases de la ie de ces oura!es7 telles que leur construction7 leur mise
en eau et leur rsistance A l'ala sismiqueC
Les mod4les de comportement dits uni@is permettent de traiter le comportement
des sables et des ar!iles dans le mBme cadre7 pour des tats lEc"es et denses des
solsC Ces mod4les apparaissent donc particuli4rement bien adapts aux probl4mes
de remblais sur sol compressible7 syst4mes associant ar!iles ou limons et sol
!ranulaireC L'intrBt rside dans le @ait qu'un unique mod4le de comportement peut
Btre utilis pour modliser ces di@@rents types de matriauC
+our dcrire ces mod4les7 il est ncessaire de traailler7 en particulier7 dans le cadre
$H #C$ ,ntroduction
des milieux poreux saturs et de prsenter la t"orie de l'lasto/plasticitC
Ce c"apitre s'inspire des di@@rents traaux biblio!rap"iques de Mestat R#&&#S7
Cambou et (ic"er R#&&#S7 (au R#&&=S7 Coquillay R#&&9S7 ?encI R#&&9S et +runier
R#&&8SC
Un sol naturel satur est un milieu poreux constitu de deux p"ases : la p"ase
solide et la p"ase liquideC Le principe des contraintes e@@ecties de Ter3a!"i permet
une description satis@aisante de l'interaction entre les p"asesC Cette description
s'appuie sur la loi de 2arcy pour l'coulement du @luide7 sur les quations de
conseration des masses @luides7 de l'quilibre mcanique du milieu poreux et sur le
mod4le de comportement de la partie solide reliant le tenseur des contraintes
e@@ecties A ses d@ormationsC
Le mod4le de comportement d'un matriau est la relation @onctionnelle qui relie les
e@@orts intrieurs aux !randeurs cinmatiques dcriant les d@ormations de ce
milieuC La @orme !nrale de la relation @onctionnelle est donne par l'quation
suiante :
c
ij
=F(c
ij
) R#C$S
oZ c
ij
dsi!ne les composantes du tenseur des d@ormations7 c
ij
celles du
tenseur des contraintes et F la @onctionnelleC
,l existe en !omcanique un !rand nombre de mod4les de comportement plus ou
moins complexesC La complexit des mod4les dpend de la @inesse de description
des p"nom4nes naturels obsers et de l'ob%ecti@ poursuii dans l'analyseC Les
mod4les simpli@is se limitent A reprsenter !lobalement le comportement des
structures !otec"niques7 tandis que les mod4les plus olus permettent de mener
des analyses locales plus aances du comportement des solsC
/-/ #&sticit
Un comportement lastique d'un matriau implique la rersibilit des d@ormations
du milieuC Les d@ormations peuent alors Btre relies aux contraintes par une
relation @onctionnelle linaire ou non linaireC
/-/-, #&sticit #in&ire is!tr!0e *e H!!6e
2ans le cas d'un comportement lastique linaire isotrope7 le tenseur des
d@ormations est reli au tenseur des contraintes ia la relation de (ooIe7 en
composantes dans un rep4re cartsien :
c
ij
=
1++
E
(
c
ij
c
ij
0
)
+
E
(
c
kk
c
kk
0
)
6
ij
R#C#S
aec c
ij
0
l'tat de contraintes initial du sol assurant l'quilibre mcanique pour les
sols naturels au reposC
# Modlisation du comportement des !omatriaux $9
-t la relation inerse :
(
c
ij
c
ij
0
)
=
E
1++
c
ij
+E
(1++)(12+)
c
kk
6
ij
R#C=S
aec
6
ij
le symbole de 5ronecIer7
E le module d'6oun!7
+ le coe@@icient de +oissonC
E et + sont les deux param4tres de l'lasticit isotrope7 qui peuent Btre
substitus par le module de compressibilit K et le module de cisaillement G
par les relations suiantes :
G =
E
2(1++)
K =
E
3(12+)
R#CHS
Le mod4le lastique linaire isotrope est peu utilis pour dcrire le comportement
des sols7 car il ne peut ni dcrire l'irrersibilit du comportement7 ni sa dpendance
au c"emin de c"ar!ement subiC
/-/-/ #&sticit n!n #in&ire
L'approc"e lastique non/linaire permet de tenir compte de la non linarit
rersible du comportement des sols A de tr4s @aibles nieaux de d@ormationsC -lle
permet7 par exemple7 de dcrire la dpendance du comportement A l'tat de
contraintes ou de d@ormationsC
Les mod4les "yperlastiques constituent la premi4re cat!orie des mod4les
lastiques non linairesC Un mod4le est dit "yperlastique si la dissipation
intrins4que est tou%ours identiquement nulle Rin!alit de Clausius/2u"emSC Les
contraintes s'exer0ant sur le matriau dcoulent d'un potentiel d'ner!ie libre W
de (elm"olt3 telle que :
c
ij
=
W(c
kl
)
c
ij
R#C9S
2ans ces conditions7 le tenseur A liant les incrments de contraintes aux
incrments de d@ormations ri@ie la symtrie ma%eure en plus des symtries
mineuresC -n utilisant les notations suiantes :
d c
ij
=A
ijkl
dc
kl
R#CFS
cela si!ni@ie que
A
ijkl
=A
klij
C Les symtries mineures sont assures par la symtrie
des tenseurs de contraintes et de d@ormationsC
$F #C# Jlasticit
Les mod4les "ypolastiques constituent la seconde classe de mod4les de
comportement non linairesC ,ls ne drient plus d'un potentiel t"ermodynamique et
sont !nralement issus de @ormulations empiriquesC 2es dissipations internes
d'ner!ie se produisent au cours des cycles de c"ar!es<dc"ar!esC ,ls permettent
de traiter des !randes d@ormations RSimo et (u!"es R#&&&SS en introduisant des
d@ormations irrersibles et une relation incrmentale entre les taux de contraintes
et les taux de d@ormations lastiquesC Ces mod4les sont surtout utiliss en
complment d'une loi d'olution portant sur les d@ormations plastiques du milieu
RY#C= SC
+our une reue plus compl4te de ces mod4les7 on peut se r@rer au traail
biblio!rap"ique de Lee R$;;HS cit par Coquillay R#&&9SC
Ces mod4les n'ont pas la prtention de reprsenter le comportement rel des sols
mais sont utiliss comme base de dpart pour les mod4les lasto/plastiques
prsents au para!rap"e #C= C
/-4 #&st!"0#&sticit
La @ormulation classique du comportement lasto/plastique d'un milieu continu se
place dans l'"ypot"4se de la trans@ormation in@initsimaleC Ces mod4les de
comportement cartent tout e@@et de ieillissement du matriau et de iscositC
Les mod4les lasto/plastiques permettent de dcrire un comportement non linaire
aec une d@ormation irrersible des matriauxC Le sc"ma des mod4les lasto/
plastiques int4!re l'existence d'un palier d'coulement sur la courbe contrainte/
d@ormation et de d@ormations irrersiblesC Cette application permet de dcrire de
@a0on relatiement satis@aisante les principaux aspects du comportement mcanique
des sols saturs7 en conserant nanmoins un domaine de rersibilitC +ar ailleurs7
ce sc"ma est bien adapt A une implantation dans les lo!iciels de calcul par
lments @inisC
Le temps p"ysique n'est pas suppos interenir Rpas d'e@@et de itesseSC
Cette section ise A prsenter les notions @ondamentales de la t"orie de l'lasto/
plasticit7 qui sont7 pour un mod4le lasto/plastique A un seul mcanisme :
la partition des d@ormations7 qui dcompose le tenseur des d@ormations
totales en la somme du tenseur des d@ormations lastiques et du tenseur
des d@ormations plastiques [
la sur@ace de c"ar!e7 qui d@init le seuil de contrainte au delA duquel le
comportement d'un matriau est irrersible [
le domaine d'lasticit7 qui correspond A l'intrieur de la sur@ace de c"ar!e et
dans lequel les d@ormations sont rersibles [
le c"oix des ariables internes dcriant la mmorisation de l'"istoire des
tats du matriau Rcrouissa!e7 d@ormations plastiquesS [
l'crouissa!e7 qui permet de @aire oluer la sur@ace de c"ar!e dans l'espace
des contraintes en @onction de l'intensit des sollicitationsC 2ans ce cas7 le
domaine d'lasticit arie !alement [
la r4!le d'coulement plastique7 qui dcrit la mani4re dont oluent les
d@ormations plastiques et les autres ariables internes [
# Modlisation du comportement des !omatriaux $:
le crit4re de plasticit par@aite7 qui caractrise la rupture du matriauC
Lorsque le seuil de contrainte n'olue pas7 ce crit4re est con@ondu aec la
sur@ace de c"ar!eC
/-4-, P&rtiti!n *es *2!rm&ti!ns et re#&ti!n incrment&#e 7(0!#&s"
ti3e
La plasticit se caractrise par la prsence de d@ormations irrersibles au
dc"ar!ementC Les d@ormations se dcomposent en une partie lastique et une
partie plastiqueC La partition des taux de d@ormations donne la relation suiante :
c
ij
= c
ij
e
+ c
ij
p
R#C:S
Les taux de d@ormation lastique c
ij
e
et de contrainte c
ij
sont lis par
l'intermdiaire du tenseur d'lasticit
A
ijkl
:
c
ij
=A
ijkl
c
kl
e
R#C8S
aec
c
ij
e
le taux de d@ormation lastique7
c
ij
p
le taux de d@ormation plastiqueC
/-4-/ Sr2&ce *e c7&r5e et *!m&ine *8#&sticit
Le deuxi4me concept @ondamental est celui de domaine d'lasticitC Le domaine
initial d'lasticit d@init l'ensemble des tra%ets de c"ar!ement le lon! desquels le
comportement du matriau est continuellement lastiqueC Lorsque le tra%et de
c"ar!ement sort de ce domaine7 un p"nom4ne p"ysique supplmentaire se
superpose A celui de la d@ormation lastiqueC Ce p"nom4ne7 qui correspond A la
d@ormation plastique7 est irrersibleC
Le domaine d'lasticit est donc d@ini par une @onction scalaire f du tenseur de
contrainte
c
ij
7 appele @onction de c"ar!e du matriau et telle que :
f (c
ij
)0
correspond A l'intrieur du domaine [
f (c
ij
)=0
correspond A la @ronti4re du domaineC 2es d@ormations
plastiques peuent aoir lieu7 A condition que
f (c
ij
)
c
ij
c
ij
>0 7
correspondant au cas dit de c"ar!ement7 aec c
ij
le taux de contraintes [
f (c
ij
)>0
correspond A l'extrieur du domaineC Cette partie du domaine
est impossible A atteindreC
La condition f (c
ij
)0 est nomme crit4re d'lasticit et la condition
f (c
ij
)=0
est nomme crit4re de plasticitC f doit Btre une @onction conexeC
La sur@ace de c"ar!e peut dpendre de l'tat de contrainte seul : il s'a!it alors du
cas particulier de la plasticit par@aiteC -lle peut !alement dpendre du tra%et de
$8 #C= Jlasto/plasticit
d@ormation plastique ou d'une autre ariable interne : il s'a!it alors d'un mod4le
lasto/plastique aec crouissa!eC
+our le matriau crouissable7 le domaine d'lasticit actuel dpend de l'tat
d'crouissa!e7 reprsent par un ensemble de ariables k introduites dans
l'expression de la sur@ace de c"ar!eC La sur@ace de c"ar!e est alors note
f (c
ij
, k )=0 C Les olutions de l'tat d'crouissa!e sont conditionnes par celles
des d@ormations plastiquesC
/-4-4 cr!iss&5e
Les c"an!ements de @orme et de taille des sur@aces de c"ar!e sont contrMls par
les lois d'olution des ariables d'crouissa!eC Les di@@rents types d'crouissa!e
peuent Btre !nralement spars suiant un crouissa!e isotrope ou un
crouissa!e cinmatiqueC
L'crouissa!e isotrope contrMle la taille de la sur@ace de c"ar!e par l'intermdiaire
d'une ariable scalaireC Gnralement7 pour les mod4les relati@s au comportement
des !omatriaux7 cet crouissa!e porte sur l'an!le de @rottement de Coulomb
mobilis ou sur la pression critique de con@inement Rnotions d@inies au Y#C9 SC
Les crouissa!es non isotropes peuent modi@ier la sur@ace de c"ar!e en lui
appliquant une rotation7 une translation cinmatique ou une distorsionC
L'crouissa!e cinmatique par rotation7 introduit par une ariable tensorielle d'ordre
#7 contrMle la rotation de la sur@ace de c"ar!e autour d'un point @ixe de cette sur@aceC
L'crouissa!e cinmatique par translation7 introduit par une ariable tensorielle du
second ordre7 permet la translation de la sur@ace de c"ar!e7 tr4s utilise pour
modliser le comportement cyclique des solsC L'crouissa!e par distorsion contrMle
la @orme de la sur@ace de c"ar!e en introduisant une ariable tensorielle d'ordre HC
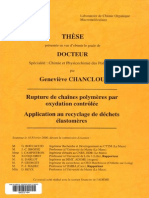
La @i!ure #C$ prsente l'ensemble des crouissa!es cinmatiques couramment
utiliss dans la littratureC L'axe des abscisses reprsente la pression isotrope de
con@inement p R p=
c
ij
6
ij
3
S et l'axe des ordonnes le diateur des contraintes
q R q=
.
1
2
s
ij
: s
ij
aec
s
ij
=c
ij
p6
ij
SC
Illustration 2.1 : Diffrentes formes de lois d'crouissage : a) isotrope ; b) rotation ; c)
translation ; d) distorsion (Jeremi et al. 2!!")
# Modlisation du comportement des !omatriaux $;
/-4-9 R+5#e *8c!#ement 0#&sti3e
La r4!le d'coulement plastique exprime l'accroissement de d@ormation plastique
en @onction des tats de contrainte c
ij
et c
ij
7 et d'crouissa!e k 7 par
l'intermdiaire d'un potentiel plastique g qui peut Btre di@@rent de la @onction de
c"ar!e f C L'expression !nrale de l'coulement plastique prend la @orme
suiante :
c
ij
p
=
\
g
c
ij
R#C;S
aec
\ un scalaire positi@ appel multiplicateur plastiqueC
Lorsque les @onctions f et g di@@4rent7 la r4!le d'coulement est dite non asso/
cieC
On introduit !alement7 lorsqu'il y a crouissa!e7 la ariable h(c
ij
, k ) 7 appele
module d'crouissa!e et d@inie par la relation :
h
\=
f
c
ij
c
ij
R#C$&S
/-4-: Re#&ti!ns incrment&#es &;ec sei# 0#&sti3e ni3e
-n considrant (c
ij
, k) l'tat de contrainte et d'crouissa!e sur la @ronti4re du
domaine d'lasticit actuel7 les relations suiantes sont ri@ies :
f (c
ij
, k) = 0
c
ij
= c
ij
e
+ c
ij
p
= c
ij
e
+
\
g
c
ij
R#C$$S
aec
\=0 en cas de dc"ar!ement et
\>0 en cas de c"ar!ementC
Le multiplicateur plastique doit A son tour Btre dtermin pour d@inir compl4tement
la relation de comportementC ,l @aut utiliser la condition de consistance
f =0 7 qui
indique que l'tat de contrainte doit rester sur la sur@ace de c"ar!e au cours du
c"ar!ement f =0 et
\>0 C Cette condition s'crit :
f =
f
c
ij
c
ij
+
f
k
k=0
R#C$#S
La loi d'crouissa!e de la ariable k qui !ouerne l'olution de cette ariable
peut s'crire comme suit :
k=
\l
k
(c
ij
, k ) R#C$=S
S'il y a d'autres ariables internes pour dcrire l'crouissa!e7 on d@init aussi les
r4!les d'coulement qui leur correspond sur le mBme mod4le Rquation #C;SC
#& #C= Jlasto/plasticit
Les relations prcdentes permettent d'tablir l'expression du module d'crouissa!e
h :
\h=
f
c
ij
c
ij
=
f
k
k=
f
k
\l
k
R#C$HS
2'oZ7 par identi@ication des termes dans l'quation #C$H7 on obtient :
h=
f
k
l
k
R#C$9S
-n utilisant la proprit de partition des d@ormations lastique et plastique
Rquation #C:S7 ainsi que la relation liant les incrments de contrainte aux incrments
de d@ormations lastiques Rquation #C8S7 la condition de consistance Rquation
#C$#S permet d'tablir l'expression du multiplicateur plastique
\ en c"ar!e :
\=
f
c
ij
A
ijkl
c
kl
h+
f
c
ij
A
ijkl
g
c
kl
R#C$FS
La relation incrmentale liant les incrments de d@ormations A ceux de contraintes
prend alors la @orme suiante Ren c"ar!eS :
c
ij
=
A
ijkl
(
A
ijnm
g
c
nm
)(
f
c
rs
A
rskl
)
h+
f
c
nm
A
nmrs
g
c
rs
c
kl
R#C$:S
/-4-< Re#&ti!ns incrment&#es 0!r #8#&st!"0#&sticit = 0!tentie#s
m#ti0#es
Cette partie s'inspire @ortement des traaux de Mestat R#&&#SC Les rsultats
d'expriences ont par@ois amen A remettre en cause le c"oix de la t"orie lasto/
plastique A un mcanisme uniqueC Un sc"ma t"orique plus lar!e a t propos
par 5oiter R$;F&S7 puis Mandel R$;F9S a@in d'introduire des sources multiples de
plasticitC
L'"ypot"4se de partition des d@ormations lastiques et plastiques demeure7 mais la
r4!le d'coulement plastique deient une combinaison linaire d'un certain nombre
de potentiels plastiques distinctsC Le nombre de potentiels plastiques peut7 quant A
lui7 arier selon le c"emin de c"ar!ement suiiC C"aque potentiel plastique d@init un
mcanisme plastiqueC La prsence d'un potentiel plastique dans la r4!le
d'coulement indique que le mcanisme plastique associ est acti@C
-n supposant un nombre n maximum de mcanismes potentiellement acti@s pour
un matriau7 le mcanisme i est caractris par une sur@ace de c"ar!e
# Modlisation du comportement des !omatriaux #$
f
i
(c
pq
, k
i
)
7 un potentiel plastique g
i
et une ariable d'crouissa!e k
i
C Les
ariables d'crouissa!e k
i
du mcanisme i peuent dpendre de la
plasti@ication de tous les mcanismes acti@s ou seulement du mcanisme i
considrC ,l @aut alors distin!uer les ariables de coupla!e des ariables propres A
c"aque mcanismeC La notion de mcanisme acti@ est quialente A la notion de
mcanisme en c"ar!e7 introduite ci/dessus dans le cas d'un mcanisme plastique
uniqueC
+ar d@inition7 on a :
si
f
i
0
ou
f
i
=0
et
f
i
0
7 le mcanisme i est considr comme
inacti@ et
\
i
=0
[
si
f
i
=0
et
f
i
>0
7 le mcanisme est acti@ et
\
i
>0
C
+our un nombre m de mcanismes acti@s7 aec m<n 7 A un instant donn de
c"ar!ement7 le taux de d@ormation plastique est obtenu A partir de la somme des
contributions plastiques de c"aque mcanisme :
c
rs
p
=
i=1
m
\
i
g
i
c
rs
R#C$8S
L'application de la condition de consistance au mcanisme i 7
f
i
=0 7 permet
d'tablir dans le cas !nral Rprsence de ariables de coupla!eS la relation
suiante :
j=1
m
|
(
f
i
c
pq
)
A
pqrs
(
g
j
c
rs
)
(
f
i
k
i
)
l
j
\
j
=
(
f
i
c
pq
)
A
pqrs
c
rs
R#C$;S
2ans le cas oZ la ariable
k
i
est une ariable restreinte A un seuil particulier7 les
@onctions d'crouissa!e
l
j
pour ( j 1, m , ji ) seront nullesC
Le mod4le de comportement s'exprime sous la @orme d'une relation multilinaire
entre le taux de contrainte et celui de d@ormationC L'quation prcdente7 crite
pour l'ensemble des mcanismes acti@s7 conduit A un syst4me de m quations :
j=1
m
D
ij
\
j
=B
i
R#C#&S
aec
D
ij
=
(
f
i
c
pq
)
A
pqrs
(
g
j
c
rs
)
(
f
i
k
i
)
l
j
B
i
=
(
f
i
c
pq
)
A
pqrs
c
rs
R#C#$S
## #CH Autres approc"es
/-9 Atres &00r!c7es
/-9-, H(0!0#&sticit
Les mod4les constituti@s d'"ypoplasticit ont t delopps depuis les annes
$;8&C ,ls constituent une description alternatie du comportement des solsC Ces
mod4les ne ncessitent pas de d@inir explicitement de sur@aces de c"ar!e ou de
potentiel plastique7 tout en dcriant le comportement non linaire et inlastique des
solsC La @orme !nrale des mod4les "ypoplastiques peut Btre ramene A
l'expression suiante :
c
ij
=A
ijkl
c
kl
+b
ij
c R#C##S
La premi4re partie de l'expression #C## reprsente la part "ypolastique du mod4le7
relation linaireC La seconde partie est quant A elle une @onction non linaire
caractrisant le comportement non linaire du solC Les tenseurs d'ordre H A et
d'ordre # b peuent dpendre selon les mod4les de une ou plusieurs ariables
d'tat7 telles que les contraintes de Cauc"y ou encore l'indice des ides du
matriauC
Une description @ine de ces @ormulations est notamment prsente par Tama!nini et
alC R#&&&S7 se @ocalisant sur les capacits de deux classes de mod4les
"ypoplastiques existants : le mod4le delopp par une quipe de c"erc"eurs de
5arlsru"e R5olymbas7 $;;$S et celui delopp A Grenoble par Caillerie et C"ambon
R$;;HSC
/-9-/ T7!rie *e #& 0#&sticit 5nr&#ise
L'ide principale relatie A la t"orie de la plasticit !nralise7 introduite par
.ienIieUic3 et Mr\3 R$;8HS7 puis tendue par +astor et alC R$;897 $;8F7 $;8:7 $;;&S
consiste A ne pas d@inir explicitement une sur@ace de c"ar!e et un potentiel
plastiqueC Les !radients de ces sur@aces sont utiliss directement dans l'criture des
mod4lesC
2e plus7 cette t"orie prdit l'apparition de d@ormations plastiques pour tout tat de
contraintes et toutes directions de c"ar!ement7 indpendamment des conditions de
c"ar!ement ou de dc"ar!ementC +our cette t"orie7 le comportement lasto/
plastique du matriau est dcrit par une relation !nrale incrmentale :
c=H
t
(
c , c , k
i
) c
R#C#=S
Le tenseur de ri!idit tan!ente H
t
dpend de l'tat de contrainte c 7 de la
direction du taux de contrainte c et de l'ensemble des ariables internes du
mod4le7
k
i
C
La dpendance de H
t
par rapport A la direction de c s'exprime en di@@renciant
les di@@rents cas de c"ar!ement7 c'est A dire le cas de c"ar!ement ( L) pour
N loadin! O et le cas de dc"ar!ement (U) pour N unloadin! OC Les conditions de
c"ar!ement<dc"ar!ement sont d@inies par les crit4res #C#H7 pour un tenseur n
norm n=1 7 d'ordre $7 d@inissant une direction dans l'espace des contraintes
# Modlisation du comportement des !omatriaux #=
A partir d'un tat de contraintes c :
n c
e
> 0 - chargement
n c
e
0 - dchargement
n c
e
= 0 - chargement neutre
R#C#HS
aec
c
e
le taux de contrainte lastique7 c'est A dire le taux de contrainte tabli
pour un matriau purement lastiqueC Le ecteur de direction n dans l'espace des
contraintes est suppos connu pour c"aque mcanismeC ,l dpend de l'tat de
contrainte c et de l'ensemble des ariables d'crouissa!e k C
-n d@inissant :
( H
t , L
)
1
= ( H
t , e
)
1
+
1
h
L
n
gL
n
( H
t , U
)
1
= ( H
t , e
)
1
+
1
h
U
n
gU
n
R#C#9S
la continuit de c"ar!ement neutre est assure car :
c
L
=
(
H
t , e
)
1
c= c
U
R#C#FS
H
t , e
est le tenseur de ri!idit lastiqueC Les modules d'crouissa!e en
c"ar!ement7 h
L
7 et en dc"ar!ement7
h
U
7 sont obtenus sans @aire r@rence A
la sur@ace de c"ar!eC Les tenseurs d'ordre $ n
gL
et n
gU
7 norms7 sont les
directions normales aux potentiels plastiques de c"ar!ement et de dc"ar!ementC
2ans le cadre de la plasticit !nralise7 le comportement non linaire irrersible
des sols peut Btre compl4tement d@ini par trois directions (n , n
gL
, n
gU
) 7 deux
@onctions scalaires (h
L
, h
U
) et un tenseur de ri!idit lastique H
t , e
C
Les quations tablies dans le cadre de la plasticit !nralise !ardent la mBme
@orme que celles tablies dans le cadre lasto/plastique classiqueC ,l est nanmoins
possible de d@inir a posteriori une @orme de sur@ace de c"ar!e et de potentiel
plastique en int!rant les termes n et n
gL/U
7 comme ralis par +astor et alC
R$;;&SC
/-: Re;e *e m!*+#es e.ist&nts
L'ob%et de ce para!rap"e est de prsenter le comportement des sols sous
c"ar!ements monotone et cyclique et les !randes classes de mod4les existants
adapts A ce type de c"ar!ementsC
/-:-, M!*#is&ti!n * c!m0!rtement *es s!#s 5r&n#&ires
2.5.1.1 Rsultats exprimentaux
L'interprtation des essais triaxiaux en sollicitations monotones raliss sur des sols
#H #C9 'eue de mod4les existants
!ranulaires m4ne aux obserations suiantes relees par Mestat R#&&#S :
Apparition de d@ormations irrersibles pour de @aibles d@ormationsC Le
domaine d'lasticit de ces matriaux est tr4s rduitC
Les sables denses prsentent un pic de rsistance7 suii d'un
radoucissement pro!ressi@C Le cisaillement impos conduit alors dans un
premier temps A une compression de l'c"antillon suiie d'une au!mentation
de olumeC
Les sables lEc"es ne prsentent pas de pic de rsistance aant d'atteindre
une aleur asymptotique limiteC Le olume de l'c"antillon diminue durant
toute la dure de l'essaiC
L'eneloppe des points de rupture Rquialente au palier d'coulement
plastique sans d@ormation olumiqueS dans le plan de Mo"r (c ,t) est
une droite passant par l'ori!ine7 tant pour un sable lEc"e que pour un sable
dense R c contrainte normale et t contrainte tan!entielle localeS C
Lorsqu'il y a c"an!ement de comportement olumique7 aec un passa!e
d'une p"ase de contraction A une p"ase de dilatance7 l'tat du sol est appel
N tat caractristique OC
La d@ormation olumique tend ensuite ers une limite pour les !randes
d@ormationsC La condition dc
v
=0 correspond A la notion N d'tat
critique OC
+our les @ortes pressions de con@inement7 une courbure de l'eneloppe de
rupture apparaQt ers l'axe des compressions isotropesC
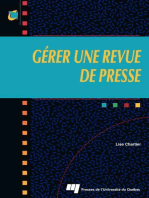
Les essais sur presse tridimensionnelle montrent une eneloppe de rupture
en @orme de trian!le curili!ne dans le plan diatorique Rillustration #C#7
Lade R$;::SSC *anmoins7 cette eneloppe ne prsente pas de points
an!uleuxC
+our les sables "umides ou l!4rement ciments7 l'eneloppe de rupture ne
passe plus par l'ori!ine et le matriau prsente donc une co"sionC
Les rsultats d'essais sous sollicitions cycliques permettent de mettre en idence
les points suiants RCambou et (ic"er7 #&&#S :
-@@et de l'"istoire de c"ar!ement en contraintes qui a!it essentiellement sur
la partie diatoire de la rponseC Cet e@@et traduit l'olution d'une
anisotropie induite aec l'"istoire de c"ar!ementC
-@@et des ariations de olume qui se traduit par une au!mentation de
densit en r!ime drain ou une diminution de la contrainte e@@ectie en
conditions non draines7 qui peut conduire A la liqu@action des solsC
# Modlisation du comportement des !omatriaux #9
2.5.1.2 Modles de comportement
+our reprsenter le comportement des sables sous c"ar!ement monotone7
di@@rentes approc"es de modlisation dans le cadre de l'lasto/plasticit ont t
mises en place :
Mod4le lasto/plastique par@aitement plastique : sur@ace de rupture de Mo"r/
CoulombC
Mod4les lasto/plastiques A deux mcanismes : la ma%orit de ces mod4les
associe un mcanisme plastique pour les sollicitations diatoires
RcisaillementS et un second pour les sollicitations isotropesC ?encI R#&&9S a
tabli une reue biblio!rap"ique tendue des mod4les de ce type7 dont le
mod4le C?S# dans son approc"e "irarc"ise mise en place par MaleIi
R$;;8SC
Mod4les lasto/plastiques A un mcanisme @erm sur l'axe des
compressions isotropes RN cap model OSC ?encI R#&&9S propose !alement
une reue biblio!rap"ique de ces mod4les7 dont les mod4les de 2esai
R$;8&S ou encore de *oa R$;8#S bas sur le mod4le de Cam/Clay
Rprsent au Y#C9C#CH SC
Les mod4les de type lasto/plastique bass sur un seul crit4re de plasticit RMo"r/
CoulombS7 A crouissa!e isotrope Rtype Cam/ClayS7 ou bien A deux sur@aces de
c"ar!e deloppant uniquement des crouissa!es isotropes Rmod4le de Lade
R$;::SS7 ne sont pas adapts A la modlisation du comportement des sols sous
sollicitations cycliques7 mais donnent des rsultats acceptables pour des
c"ar!ements monotonesC 2ans le cadre de l'lasto/plasticit7 un crouissa!e mixte
apparaQt ncessaire pour reproduire les p"nom4nes cycliques obsers pour les
sablesC Cependant7 la modlisation de l'anisotropie induite par la rotation des
contraintes principales reste un des points les plus dlicatsC
2es mod4les adapts aux comportements des sables sous c"ar!ements cycliques
existent et ont notamment t proposs par G"aboussi et Momem R$;:;7 $;8#S7
Man3ari et 2a@alias R$;;:S7 2esai R$;;HS et Fan! R#&&=S7 (u%eux R$;89S7 +rost et
5eane R$;;&SC Ces mod4les int4!rent de l'crouissa!e cinmatique en translation7
rotation ou mixte7 aec un ou plusieurs mcanismes plastiquesC
Illustration 2.2 : #race de la surface de rupture d'apr$s %ade(1"&&)
#F #C9 'eue de mod4les existants
G"aboussi et Momem R$;8#S proposent un mod4le cyclique pour les sables
en utilisant un crouissa!e isotrope et cinmatique de la sur@ace de c"ar!eC
Le module d'crouissa!e est suppos et les d@ormations olumiques sont
calcules A partir d'une relation semi/empiriqueC Les d@ormations
diatoires sont issues d'une loi d'coulement non associeC Ce mod4le
sous/estime la part des d@ormations plastiques de cisaillement7 tandis que
les d@ormations olumiques sont en bon accord aec les rsultatsC
Le mod4le lasto/plastique de Man3ari et 2a@alias R$;;:S est bas sur le
concept d'tat critiqueC ,l combine deux sur@aces de c"ar!e et la t"orie de
plasticit A sur@ace limite RN boundin! sur@ace plasticity OSC L'ide ma%eure de
la plasticit A sur@ace limite est construite sur la notion d'une sur@ace
en!lobant tous les tats de contrainte possiblesC La distance entre l'tat de
contrainte et son ima!e sur la sur@ace limite est utilise pour aluer le
module d'crouissa!eC La prise en compte de ces deux sur@aces permet de
d@inir une transition douce de l'tat lastique A l'tat plastiqueC
2ans le cadre de la plasticit !nralise7 +astor et alC R$;;&S d@inissent un mod4le
capable de reprsenter le comportement des sables sous sollicitations cycliquesC
5"oei et alC R#&&HS ralisent des simulations de tenue au sisme de di!ues en terre
aec ce mod4le en comparaison des rsultats obtenus aec les N cap models OC ,ls
dmontrent que cette approc"e permet notamment de mieux rendre compte du
comportement rel de ces oura!es sous sismes7 notamment aec l'application
sur le barra!e de San Fernando7 oZ la monte de pression interstitielle dans le
barra!e se produit apr4s le sisme7 p"nom4ne obser lors du sisme de $;:;C
Ce mod4le a !alement t utilis par Fernande3 Merodo R#&&$S pour simuler le
p"nom4ne de liqu@action d'un talus de sable lEc"e sous c"ar!ement sismiqueC
/-:-/ M!*#is&ti!n * c!m0!rtement *es &r5i#es
2.5.2.1 Rsultats exprimentaux
Les essais A l'appareil triaxial en sollicitations monotones7 raliss sur des sols
co"rents naturels tels que les ar!iles7 permettent d'identi@ier des traits de
comportement !nraux A cette classe de matriaux RMestat7 #&&#S :
Le comportement drain !nral d'une ar!ile est analo!ue A celui d'un
sableC Les ar!iles surconsolides prsentent un pic de rsistance et leur
olume au!mente au cours du cisaillementC Les ar!iles normalement
consolides diminuent de olumeC
Les ar!iles prsentent un domaine rersible A l'intrieur duquel7 pour un
@aible nombre de cycles de c"ar!e/dc"ar!e7 le comportement du sol est
rersibleC
La trace de la sur@ace de rupture dans le plan (c, t) est compose d'une
partie incure pour les @aibles pressions Rdomaine des ar!iles
surconsolidesS et d'une droite pour les pressions plus @ortes Rdomaine des
ar!iles normalement consolidesSC
2es d@ormations irrersibles dues A la iscosit du sol sont !alement
prsentes en permanenceC
# Modlisation du comportement des !omatriaux #:
Les essais de consolidation isotrope et les essais triaxiaux permettent d'introduire
les concepts d'tat limite et d'tat critiqueC
2.5.2.2 tat limite en compression isotrope
Les rsultats d'un essai de compression isotrope sont reports dans le plan
(ln p' , e) 7 oZ e est l'indice des ides du matriau et p' la pression isotrope
e@@ectieC Les courbes obtenues peuent Btre simpli@ies et assimiles A des droites
Rillustration #C=S7 alors que le comportement rel des sols prsente une "ystrsis
Rillustration #CHSC
Lors du c"ar!ement isotrope sur une ar!ile normalement consolide7 le
comportement du sol s'assimile A une droite de pente \ C Cette partie de la
rponse est appele droite de consolidation normaleC Le lon! de cette courbe7 le sol
est dit normalement consolid et se troue A l'tat plastiqueC La courbe est
!nralement reprsente par l'quation suiante :
e=e
\
\ln p' R#C#:S
Lors d'un dc"ar!ement ou rec"ar!ement7 le comportement du sol est modlis par
une droite de pente plus @aible C Les p"ases de comportement7 oZ le matriau a
une rponse suiant la droite de pente 7 sont associes au domaine d'lasticit
du matriauC La rponse lastique du matriau est contrMle par un mod4le
lastique non linaireC L'quation de cette courbe est la suiante :
e=e
ln p' R#C#8S
Les constantes e
\
et e
correspondent respectiement aux indices des ides
obtenus pour une pression de r@rence p' =1kPa C
Illustration 2.' : (tat limite et tat criti)ue dans le plan (ln p' , e)
#8 #C9 'eue de mod4les existants
Les points A et ) de l'illustration #C= sont des points de passa!e d'un tat lastique A
un tat plastiqueC Ce sont des points d'tat limiteC -ntre les points A et )7 la courbe
de dc"ar!ement !arde la mBme pente7 mais la quantit e
olue et pourra Btre
considre comme un param4tre d'crouissa!e des mod4les dans la description de
l'essai de compression isotropeC e
peut donc Btre quali@i d'indice des ides
irrersible ou plastiqueC
2.5.2.3 tat critique en compression triaxiale
+our des ar!iles reconstitues7 au cours d'un essai triaxial drain7 les c"antillons
de sol attei!nent un palier d'coulement plastique7 caractris par un tat de
contraintes q/ p' constant et une ariation olumique nulleC ]uand l'tat critique
est atteint7 les di@@rents tats critiques obtenus pour un sol @orment une droite
unique dans l'espace (q , p' , e) appele droite d'tat critiqueC Ces lments
dcrient l'tat critique de l'c"antillon @ormul mat"matiquement comme suit :
q = M p'
e = I\ln p'
R#C#;S
aec :
M=
6sin
3sin
I param4tre du matriau
an!le de @rottement du matriau
Les rsultats exprimentaux montrent que7 dans le plan (ln p' , e) 7 la droite d'tat
critique est parall4le A la droite de consolidation ier!e Roir illustration #C=SC
2.5.2.4 Modles Cam-Clay et Cam-Clay modiis
Le mod4le Cam/Clay R'oscoe et alC7 $;98S et le mod4le de Cam/Clay modi@i
R'oscoe et )urland7 $;F8S ont t delopps pour dcrire le comportement des
ar!iles normalement consolids ou @aiblement surconsolidsC 2eux ersions
successies du mod4le de Cam/Clay ont t proposesC
Illustration 2.* : +omportement rel de la ,aolinite sous c-arge.dc-arge isotropes dans le
plan (ln p' , e) (/l.#abbaa 1"0&)
e
ln p'
# Modlisation du comportement des !omatriaux #;
Le premier mod4le permettait de dcrire qualitatiement les p"nom4nes obsers
exprimentalementC Mais7 pour des c"emins de sollicitations proc"es de l'axe de
compression et des rapports de contraintes @aibles R
p/ p
c
S7 ce mod4le prdit des
d@ormations diatoriques trop @ortesC
Le second mod4le corri! par 'oscoe et )urland R$;F8S modi@ie la loi d'coulement
et supprime la @onction lo!arit"me de l'expression du seuil plastique7 @onction
dlicate A int!rer numriquementC Ce mod4le est actuellement disponible dans le
lo!iciel CodeTAster ^':C&$C$H_C
Le tableau #C$ prsente la relation contrainte/dilatance7 la sur@ace de c"ar!e et la loi
lastique non linaire suiie par c"acun de ces mod4les7 exprime en respectant la
conention de la mcanique des sols Rtat de compression positi@S :
M!*+#e C&m"C#&( >ersi!n !ri5in&#e >ersi!n m!*i2ie
#&sticit n!n #i"
n&ire
c
v
e
=
1+e
0
p'
p'
c
e
= 0
R#C=&aS
c
v
e
=
1+e
0
p'
p'
c
e
=
1
3G
q
R#C=&bS
Sr2&ce *e c7&r5e
q
M p'
ln
(
p
c
p'
)
=0 R#C=$aS (
q
M p'
)
2
+1
p
c
p'
=0 R#C=
$bS
Re#&ti!n c!ntr&inte"
*i#&t&nce
c
v
p
c
p
=M
q
p'
R#C=#aS
c
v
p
c
p
=
M
2
(
q
p'
)
2
2
q
p'
R#C=#bS
T&%#e& /-, $ Re#&ti!n c!ntr&inte"*i#&t&nce? sr2&ce *e c7&r5e et #&sticit n!n
#in&ire 0!r #es m!*+#es C&m"C#&( @Mest&t? /AA/B
aec c
v
p
=c
ij
p
6
ij
7 c
p
=
.
2
3
e
ij
p
e
ij
p
7 e
ij
p
=c
ij
p
1
3
c
v
p
6
ij
C
G dsi!ne le module de cisaillement et
e
0
l'indice des ides initial li A l'tat des
contraintes initialesC
La pression de prconsolidation p
c
est d@inie comme le point d'intersection entre
la sur@ace de c"ar!e du mod4le et l'axe des pressions isotropes Rillustration #C9SC
Cette pression %oue le rMle de ariable d'crouissa!e contrMlant les olutions de la
sur@ace de c"ar!eC La loi d'crouissa!e associe A cette ariable s'crit comme
suit :
p
c
=p
c!
exp
(
1+e
0
\
c
v
p
)
R#C==S
oZ p
c!
correspond A la pression de prconsolidation initialeC
=& #C9 'eue de mod4les existants
Les mod4les de comportement de type Cam/Clay comportent @inalement sept
param4tres matriaux : e
\
, \, , " , e
0
, + et #
c!
C I est donn par la
relation : I=e
\
\+ C
2.5.2.5 !imitations des modles de type Cam-Clay
/-:-/-:-, Anis!tr!0ie *es &r5i#es n&tre##es
Les mod4les de type Cam/Clay reprsentent bien un !rand nombre de p"nom4nes
qui caractrisent le comportement des ar!iles normalement consolides sous
c"ar!ement monotoneC -n reanc"e7 ces mod4les ne permettent pas de dcrire les
p"nom4nes typiques qui apparaissent dans les sables ou les ar!iles
surconsolidesC
Les mod4les de type Cam/Clay ne tiennent pas compte de l'anisotropie des ar!iles
naturelles7 due au mode de dposition des matriauxC Ces mod4les ont t
delopps en considrant les sols comme isotropesC 2es olutions ont donc t
apportes pour corri!er ces pointsC ,l existe notamment le mod4le Mlanie
delopp par 5attan R$;;&S7 Lepidas et Ma!nan R$;;&S et Mouratidis et Ma!nan
R$;8=S cits par Mestat R#&&#SC Ce mod4le lasto/plastique est @inalement construit
aec une sur@ace de c"ar!e A crouissa!e isotrope et une relation lastique linaire
anisotropeC
/-:-/-:-/ C!m0!rtement *es &r5i#es s!s s!##icit&ti!ns c(c#i3es
La modlisation du comportement des sols sous c"ar!ements cycliques est un
autre point @aible des mod4les de type Cam/ClayC Les mod4les bass sur le concept
d'tat critique estiment conenablement les c"ar!ements monotones appliqus aux
sols7 mais ces mod4les sont incapables de modliser correctement le
comportement des sols sous c"ar!ement cycliqueC Lors des p"ases de
dc"ar!ement et d'entuelles p"ases de re/c"ar!ement7 le comportement cyclique
est uniquement modlis par un comportement lastique7 alors que les rsultats
@ont apparaQtre des d@ormations irrersibles au cours des cycles successi@sC
2es mod4les adapts aux comportements des ar!iles sous sollicitations cycliques
existent dans la littrature7 dont par exemple le N bubble model O7 delopp par Al/
Tabbaa RAl/Tabbaa R$;8:S7 Al/Tabbaa et Muir Lood R$;8;SS ou par la suite le
Illustration 2.1 : 2eprsentation des surfaces de c-arge dans le plan ( p , q) ; (gauc-e)
mod$le initial (droite) mod$le modifi (3estat 2!!2)
# Modlisation du comportement des !omatriaux =$
mod4le de )arnic"on R#&&#SC Ces mod4les int4!rent de l'crouissa!e isotrope et
cinmatique aec un ou plusieurs mcanismes plastiquesC
Al/Tabbaa R$;8:S deloppe un mod4le A deux sur@aces de c"ar!e aec
crouissa!e cinmatiqueC Ce mod4le est bas sur le mod4le Cam/Clay modi@i et
permet notamment d'obtenir de bons rsultats pour le comportement de la Iaolinite
pour des tats suconsolidsC Ce mod4le est tr4s proc"e des mod4les delopps
par Mr\3 et alC R$;:;S et (as"i!uc"i R$;89SC
Une sur@ace de c"ar!e interne7 de dimension plus rduite7 dlimite le domaine
lastique du mod4le et enre!istre des in@ormations relaties aux c"an!ements
antrieurs de sollicitations en contraintesC Une @onction d'interpolation est utilise
pour rduire la aleur des modules de ri!idit du mod4le lorsque la sur@ace de
c"ar!e intrieure s'approc"e de la sur@ace extrieureC La sur@ace de c"ar!e
intrieure a la mBme @orme que la sur@ace de c"ar!e extrieure7 identique A celle
dcrite dans le mod4le Cam/Clay modi@i Rquation #C=$bS7 rduite suiant un
coe@@icient d'"omot"tie 'C La sur@ace extrieure prend A prsent le nom de sur@ace
limite RN boundin! sur@ace OSC La loi d'coulement plastique est normale A la sur@ace
de c"ar!e intrieureC La translation de la sur@ace de c"ar!e intrieure suit une
direction obtenue du point ima!e de l'tat de contraintes sur la sur@ace de c"ar!e
limiteC
Stallebrass R$;;&S tend ce mod4le N )ubble O en introduisant une sur@ace
cinmatique supplmentaire relatie A l'"istoire des c"ar!ements prcdentsC Une
description @ine du mod4le tendu est prsente par (au R#&&=SC
)arnic"on R#&&#S prsente un mod4le de comportement A deux sur@aces limitesC La
premi4re sur@ace limite drie d'une simpli@ication du mod4le de 5aliaIin et 2a@alias
R$;;&S Rcit par )arnic"on R#&&#SSC La seconde sur@ace limite est issue du mod4le
N bubble ORAl/Tabbaa R$;8:SS tendue A une @orme !nraliseC -n e@@et7 le mod4le
ori!inal est crit uniquement pour des simulations d'essais triaxiaux7 soit
c
1
c
2
=c
3
C -lle incorpore A la @ois le concept de sur@ace limite et d'crouissa!e
mixte Risotrope et cinmatiqueSC
/-:-4 M!*+#es *e c!m0!rtement ni2is
Comme prcis en introductionRY#C$ S7 la olont de modliser le comportement des
di!ues en terre pour les di@@rentes p"ases de leur ie a conduit l'in!nierie d'-2F A
plutMt considrer un mod4le de comportement dit N uni@i O7 capable de modliser A
la @ois le comportement des ar!iles ou des sables pour des sollicitations monotones
et cycliquesC
Le deloppement de mod4les capables de prdire conenablement le
comportement des sols sous des c"ar!ements cycliques est essentiel pour
rsoudre des probl4mes !otec"niques tels que la consolidation des sols sous les
oies de transport R@erroiaires ou routi4resS7 le comportement de structures
!otec"niques sous sismes7 sous le ent ou encore la "ouleC
2ans le cadre de la plasticit7 pour dcrire le comportement monotone et cyclique
des sols7 il est possible de distin!uer dans la littrature deux !randes classes de
mod4les :
mod4les A sur@ace limite7
=# #C9 'eue de mod4les existants
mod4les A multi/mcanismes plastiquesC
La premi4re classe de mod4les est caractrise par deux sur@aces7 une extrieure
et une autre situe A l'intrieur de la premi4reC ,l est ensuite ncessaire de poser
une r4!le pour la d@inition du module d'crouissa!e relie aux deux sur@aces
R2a@alias7 $;8:SC
La seconde classe de mod4les concerne le concept des sur@aces de c"ar!e
multiples et la t"orie de l'crouissa!e cinmatique introduits par Mr\3 R$;F:S et
,Uan R$;F:S pour les mtaux et appliqus aux sols par +rost R$;::7 $;:8S7 Aubry
et alC R$;8#S suii de (u%eux R$;89SC
2.5.3.1 Modles " surace limite
2a@alias et +opo R$;:9S ont introduit la t"orie de la plasticit aec sur@ace limiteC
2es mod4les A sur@ace limite ont alors t delopps7 A partir des mod4les de type
Cam/Clay7 pour dcrire le comportement cyclique des ar!iles R2a@alias et (errmann
R$;8&S7 Al/Tabbaa R$;8:S7 Stallebrass R$;;&SS mais !alement le comportement
cyclique des sables RMan3ari et 2a@alias R$;;:SSC 6u et alC R#&&:S ont propos un
mod4le uni@i pour reprsenter le comportement des sols et des ar!iles en ralisant
une extension du mod4le CASM delopp par 6u R$;;8S7 nomme CASM/cC
Le mod4le CASM RClay And Sand Model7 6u R$;;8SS est construit sur le mod4le
Cam/ClayC C'est un mod4le A sur@ace de c"ar!e unique int!rant le concept d'tat
critiqueC La loi d'coulement d@inie pour ce mod4le dcoule d'un potentiel plastique
di@@rent de celui de la sur@ace de c"ar!eC La loi d'crouissa!e associe A la
pression critique de r@rence n'est plus uniquement dpendante des d@ormations
olumiques plastiques7 mais !alement des d@ormations diatoires plastiques R6u7
$;;9SC
2eux param4tres supplmentaires sont a%outs par rapport au mod4le Cam/ClayC
Le premier permet de modi@ier la @orme de la sur@ace de c"ar!e et le second permet
de modi@ier la position de l'intersection entre la li!ne d'tat critique et la sur@ace de
c"ar!eC ,l est possible aec ce mod4le de d@inir un tat critique qui ne se produit
pas ncessairement au pic du diateur des contraintes sur la sur@ace de c"ar!eC
Ceci est notamment obser exprimentalement pour les sables RCoop R$;;&S cit
par (au R#&&=SSC
Le potentiel plastique du mod4le CASM suit la relation de contrainte/dilatance de
'oUe R$;F#SC Le c"oix de cette loi d'coulement conduit A un coulement non
associC
Le mod4le est bas sur l'expression d'une sur@ace limite RN boundin! sur@ace OS sur
laquelle est d@ini un point ima!e de l'tat de contrainte actuel dans le plan
( p' , q) C Ce point ima!e est construit par l'intersection de la sur@ace limite et
d'une li!ne droite passant par l'ori!ine et l'tat de contrainte actuelC Le module
d'crouissa!e associ A l'tat de contraintes actuel appartenant A la sur@ace de
c"ar!e rsulte de la somme du module d'crouissa!e calcul au point ima!e et
d'une @onction de la distance entre le point ima!e et l'tat de contrainte actuelC
Le mod4le tendu CASM/c introduit cinq noueaux param4tres pour dcrire le
comportement cyclique des solsC
# Modlisation du comportement des !omatriaux ==
2eux de ces param4tres contribuent A l'estimation du module d'crouissa!e
pour les c"ar!ements ier!esC
Les modules d'crouissa!e du mod4le sont !alement d@inis di@@remment
pour les cas de dc"ar!ement et de rec"ar!ementC ,ls contrMlent la pente de
la courbe contrainte/d@ormation en @onction des cas de dc"ar!ement ou
de rec"ar!ementC
Le dernier param4tre7 introduit dans cette ersion du mod4le CASM7 d@init
le domaine d'adaptation du matriauC L'adaptation caractrise le
comportement d'un matriau qui7 sous l'action de cycles de c"ar!ement7 est
purement lastiqueC
Ces modi@ications permettent notamment de corri!er la surestimation des
d@ormations irrersibles obtenues aec le mod4le ori!inal de 2a@alias et +opo
R$;::S et permettent !alement de reproduire le comportement "ystrtique des
sols entre le dc"ar!ement et le re/c"ar!ementC
2.5.3.2 Modle de #u$eux %1&'5(
Le mod4le de comportement dit de N (u%eux O7 con0u au laboratoire MSSMat de
lD-C+ R(u%eux R$;:;S7 Aubry et alC R$;8#S7 (u%eux R$;89SS7 est un des mod4les
lastoplastiques cycliques de mcanique des sols R!omatriaux !ranulaires :
ar!iles sableuses7 normalement consolides ou sur/consolides7 !raes`S le mieux
adapt pour des simulations dDoura!es !otec"niques soumis au sismeC ,l est de
plus exploit depuis de nombreuses annes par le Centre d',n!nierie (ydraulique
de l'-2FC Son paramtra!e est donc bien maQtrisC
Les points suiants permettent de rsumer la construction du mod4le :
Ce mod4le multi/mcanismes Rsp"riques a pour un tra%et isotrope a et
diatoiresS A ariables mmoratrices est caractris par "uit sur@aces de
c"ar!e aec crouissa!e7 d@inies pour des tra%ets monotones et pour des
tra%ets cycliquesC
,l int4!re le concept d'tat critique et le crit4re de rupture de Mo"r/CoulombC
Les mcanismes diatoires sont d@inis par plans @ixes7 ce qui induit une
anisotropie de comportement du solC Les mcanismes isotropes portent
uniquement sur le comportement isotrope des solsC
A lDintrieur de ces sur@aces de rersibilit7 le comportement du matriau
est lastique non linaireC
Un crouissa!e isotrope des sur@aces de c"ar!e de c"aque plan est introduit
et porte sur une mobilisation pro!ressie de l'an!le de @rottement du
matriauC Cet crouissa!e par plan permet notamment de !nrer une
anisotropie induite du comportement du solC
L'crouissa!e cinmatique des sur@aces de c"ar!e7 permettant de
caractriser le comportement cyclique des sols7 est contrMl par des
ariables d'"istoire A olution discontinueC
La r4!le dDcoulement normal est adopte pour les mcanismes isotropes7
tandis que la r4!le dDcoulement pour les mcanismes diatoires est non
associe7 suiant la r4!le de dilatance de 'oscoe et alC R$;98SC
Le tenseur de d@ormation plastique rsulte du cumul des contributions des
=H #C9 'eue de mod4les existants
diers mcanismes acti@s Rt"orie prsente au Y#C=CF SC La d@ormation
plastique olumique couple l'ensemble des mcanismesC
La description compl4te du mod4le de (u%eux est prsente au c"apitre Y= C
/-< Int5r&ti!n *es m!*+#es *e c!m0!rtement #&st!0#&s"
ti3e
La mt"ode des lments @inis est de plus en plus utilise pour analyser le
comportement de structures dans des domaines d'in!nierie tr4s arisC Le
comportement de ces structures se caractrise souent par des non linarits7 qui
ncessitent des al!orit"mes robustes pour l'int!ration numrique des mod4les de
comportement inlastiquesC La conception de mod4les de comportement7 leur
alidation et utilisation dans des codes de calcul ne peuent pas Btre abordes sans
la dimension de mise en bure numrique de ces mod4les et sans la qualit des
sc"mas d'int!ration retenus dans un code de calcul industrielC
L'int!ration numrique des mod4les de comportement doit combiner les aspects
de prcision et de stabilit des calculs locaux raliss en re!ard du mod4le de
comportement continu7 mais !alement les aspects de temps de calcul local
ncessaire A la rsolution du probl4me non linaire localC Les sc"mas d'int!ration
locale contrMlent directement la prcision et la stabilit de la solution numrique
!lobale de la structureC
Le mod4le de comportement7 incorpor dans un code de calcul par lments @inis7
sera appel en c"aque point d'int!ration du mod4le numriqueC A cet instant de
c"ar!ement
t
n+1
7 l'al!orit"me de rsolution !lobale de l'quilibre de la structure
@ournira une estimation de l'incrment de d@ormations
Ac
n+1
Rpour un code de
calcul oZ les inconnues nodales sont les dplacementsSC Le mod4le de
comportement dera alors renoyer l'incrment de contraintes correspondant
Ac
n+1
7 ainsi que la mise A %our des ariables d'"istoire
Ak
n+1
C L'incrment de
d@ormations
Ac
n+1
7 tabli A partir du dsquilibre mcanique entre les e@@orts
extrieurs et les @orces internes7 arie7 selon le c"oix du modlisateur7 pour un
sc"ma de rsolution !lobale type *eUton ori!inal ou modi@iC
Les tec"niques d'int!ration peuent Btre spares en deux !randes cat!ories7 A
saoir les approc"es explicites Rprdiction d'-uler7 N @orUard -uler OS ou les
approc"es implicites R'etour d'-uler7 N bacIUard -uler OSC Les lments prsents
ci/dessous sont en !rande partie issus du traail biblio!rap"ique ralis par (uan!
et Gri@@it"s R#&&;S7 Olier et alC R#&&8S et +iccue33u R$;;$SC
Les notions relaties A la @ormulation incrmentale des mod4les lastoplastiques7
dont nous aons besoin dans cette section pour prsenter les di@@rents al!orit"mes
d'int!ration locale7 ont t pralablement prsentes au Y#C= C La ma%orit des
mod4les prsents au Y#C9 ne peuent pas conduire A une int!ration analytique
des quations di@@rentielles qui les dcrientC Le probl4me7 discrtis en temps7 est
alors pos au traers d'un syst4me d'quations di@@rentielles7 auquel est a%out les
quations non linaires7 qui traduisent le respect des sur@aces de c"ar!e du mod4leC
# Modlisation du comportement des !omatriaux =9
Les sc"mas d'int!ration explicites sont le plus souent stables moyennant le
respect de certaines conditions qui conduisent A limiter @ortement l'amplitude des
incrments de c"ar!ement pour assurer la consistance des mod4les et limiter la
dpendance des prdictions A la discrtisation du c"ar!ement employeC Ces
sc"mas sont tr4s robustes7 mais coXteux en temps de calcul A cause des @aibles
incrments de c"ar!ementC
La discrtisation explicite de la @ormulation incrmentale est aise7 car on dispose
d'une quation @ournissant directement l'expression de l'incrment du multiplicateur
plastique
A\
n+1
Rquation de consistanceS7 sans rsoudre un probl4me non
linaireC Le principe de rsolution prsent en #C=H est un cas particulier d'un
mod4le de comportement A mcanisme plastique uniqueC
A\
n+1
=
(
f
c
)
n
: A
n
: Ac
n+1
(
f
c
)
n
: A
n
:
(
g
c
)
n
(
f
k
)
n
l
n
Ac
n+1
= A
n
: Ac
n+1
A\
n+1
A
n
:
(
g
c
)
n
Ak
n+1
= A\
n+1
l
n
R#C=HS
L'indice n @ait r@rence A la solution coner!e A l'instant
t
n
et ( n+1) A
l'instant
t
n+1
C
Le respect de l'quation d@inissant la sur@ace de c"ar!e n'est pas assur7 car il
n'est pas pris en compte explicitement dans cette approc"e et on peut aoir des
probl4mes de dier!enceC
+our les sc"mas implicites7 Simo et Taylor R$;89S ont propos la mt"ode implicite
de pro%ection du point le plus proc"e RN Closest +oint +ro%ection Met"od O7 C++MSC
Cette mt"ode de discrtisation directe des quations assure leur respect A c"aque
pas de tempsC -lle bn@icie de plus d'un rsultat de coner!ence ers la solution
continue RMoreau R$;:=S7 (u!"es R$;8=SSC -lle consiste A tablir dans un premier
temps une prdiction lastique des contraintes7 A partir des quations lastiques et
de l'incrment de d@ormation completC Cette prdiction lastique est ensuite
corri!e et ramene par pro%ection ers la ou les sur@aces de c"ar!e miseRsS A %our
du mod4leC
Le syst4me discrtis7 prsent dans l'quation #C=97 est une illustration pour un
mod4le A mcanisme plastique unique7 de l'al!orit"me d'int!ration implicite type
C++M :
=F #CF ,nt!ration des mod4les de comportement lastoplastique
c
n+1
c
n
A
n+1
: Ac
n+1
+A\
n+1
A
n+1
:
(
g
c
)
n+1
=0
k
n+1
k
n
A\
n+1
l
n+1
=0
f
n+1
=0
R#C=9S
-n posant
$
n+1
=(c
n+1
, k
n+1
, A\
n+1
)
7 on peut crire un ecteur rsidu
%
(
$
n+1
) :
%( $
n+1
) =
c
n+1
c
n
A
n+1
: Ac
n+1
+A\
n+1
A
n+1
:
(
g
c
)
n+1
k
n+1
k
n
A\
n+1
l
n+1
f
n+1
R#C=FS
+our rsoudre le probl4me7 on peut appliquer une mt"ode de *eUton sur le
syst4me complet Rc'est A dire le rsiduS :
Phase de Prdiction
$
n+1
0
=$
n+1
&
Phase de Correction
%
(
$
n+1
m+1
)
=%
(
$
n+1
m
)
+
%($
n+1
m
)
( $
n+1
m
)
(
$
n+1
m+1
$
n+1
m
)
=0
Avec:
m: n'm(r) 'it(r+ti)n
R#C=:S
La p"ase de prdiction est tablie en appliquant par exemple un tir d'-uler7
approc"e expliciteC L'estimation de
%($
n+1
m
)
( $
n+1
m
)
ncessite le calcul de dries
partielles du second ordre pour les diers lments du mod4le lastoplastiqueC La
coner!ence du probl4me non linaire local est considre atteinte au respect d'un
crit4re de coner!ence portant sur la norme de %( $
n+1
m+1
)
C A c"aque itration7 la
aleur de $
n+1
m+1
est mise A %our de la mani4re suiante :
$
n+1
m+1
=$
n+1
m
(
%($
n+1
m
)
( $
n+1
m
)
)
1
%($
n+1
m
)
R#C=8S
# Modlisation du comportement des !omatriaux =:
La stabilit numrique inconditionnelle et la prcision de cette mt"ode ont
notamment t examines par Orti3 et +opo R$;89SC Sa coner!ence quadratique
ers la solution assure au nieau !lobal rend cette solution attractie et %usti@ie
notamment sa place prpondrante au sein des mt"odes d'int!ration numriqueC
-lle prsente nanmoins des di@@icults pour la mettre en place7 telles que :
la construction du module lasto/plastique consistant7
la ncessit de calculer les !radients des lois d'coulement Rce qui demande
des calculs analytiques supplmentairesS7
une coner!ence locale di@@icile A obtenir dans les 3ones oZ les sur@aces de
c"ar!e prsentent de @ortes courbures ou des c"an!ements de r!ime tel
que le r!ime d'adoucissement du matriau par exempleC
Cette classe d'al!orit"mes a t adapte A une lar!e classe de mod4les de
comportement des sols RMan3ari et *our R$;;:S [ 'ouainia et Muir Lood R#&&$S [
Montcns et )or%a R#&&#S [ )or%a et alC R#&&=SSC Ces mod4les drient souent du
mod4le de Cam/Clay modi@i R'oscoe et )urland R$;F8SS7 incluant par exemple un
crouissa!e cinmatique RFoster et alC R#&&9SSC
-n an!lais7 on nomme cette classe de mt"ode N return mappin! al!orit"m OC La
mt"ode de retour radial RN radial return al!orit"m OS propose par 5rie! et 5rie!
R$;::S est un cas particulier de cette classe7 appliqu au mod4le de 1on MisesC
2'autres mt"odes ont !alement intress les c"erc"eurs7 telles que la mt"ode
de N Cuttin! +lane Al!orit"m ORC+AS prsente par Simo et Orti3 R$;89S et Orti3 et
Simo R$;8FSC Le sc"ma demande un processus explicite d'int!ration qui a
dmontr des proprits intressantes de coner!enceC L'al!orit"me mis en place
ncessite uniquement le calcul de dries premi4resC -n reanc"e7 il n'est pas
possible d'tablir de module lasto/plastique consistant linarisC Ce sc"ma est
conditionnellement stableC 2e plus7 des erreurs de prcision notables apparaissent
d4s que les incrments de c"ar!ement au!mententC
Une mt"ode d'int!ration mixte entre les approc"es implicite et explicite a t mise
en place par Olier et alC R#&&8SC Cette mt"ode ralise une int!ration implicite de
l'tat de contrainte A partir d'une extrapolation explicite des ariables internes du
mod4leC Cette mt"ode7 nomme ,M+L/-d7 a t prsente pour deux classes de
mod4les de comportement7 A saoir un mod4le d'endomma!ement et un mod4le
lasto/plastiqueC Les aanta!es aancs par les auteurs de cette mt"ode sont les
suiants :
le tenseur constituti@ tan!ent est symtrique et d@ini positi@7 mBme si le
tenseur analytique ne l'est pasC
la robustesse de la mt"ode est meilleure si on emploie la matrice scante
R)ar!ellini R#&&;SSC
en l'absence de sources de non/linarits autres que celles induites par le
mod4le de comportement7 ce tenseur tan!ent reste constantC A c"aque
incrment7 la solution est obtenue apr4s une itrationC Un !ain certain en
temps de calcul est obtenuC
L'ordre de prcision de l'al!orit"me d'int!ration est au moins linaireC *anmoins7
l'erreur absolue est plus importante que pour les mt"odes implicites et une @orte
=8 #CF ,nt!ration des mod4les de comportement lastoplastique
dpendance au pas de temps est obsereC
,l existe peu de comparaisons entre les mt"odes d'int!ration pour un mBme
mod4le de comportementC Les conclusions extraites de ces traaux apparaissent
alors di@@rentes en @onction des mod4les7 puisque Man3ari et +rac"at"ananuIit
R#&&$S prconisent pour un mod4le A sur@ace limite RN boundin! sur@ace OS une
mt"ode d'int!ration implicite type C++M en comparaison aux mt"odes de
N cuttin! plane O et explicite aec N sous incrmentations OC -n reanc"e7
Lat"u!ala et +al R$;;;S critiquent les mt"odes implicites en dmontrant des
probl4mes de dier!ence et de stabilit pour les mod4les (iSS R2esai R$;;HSSC Ces
derni4res conclusions sont7 en reanc"e7 tablies pour des c"ar!ements purement
monotones tandis que la premi4re tude a t mene pour des c"ar!ements
sismiques appliqus A une colonne de solC
*anmoins7 le c"oix pour les mt"odes type N C++M O a t lar!ement adopt pour
traiter de nombreux mod4les de comportement non linaires dans beaucoup de
domainesC
/-C C!nc#si!n
Ce c"apitre a permis de prsenter la t"orie de l'lasto/plasticit applique au
comportement des solsC +ar la suite7 le comportement !nral des ar!iles et des
sables a t prsent et des exemples de mod4les reprsentati@s ont t citsC
*anmoins7 il est ncessaire de prciser que la complexit des mod4les est
souent lie A celle des p"nom4nes reprsentsC Cette complexit a un e@@et direct
sur le nombre de param4tres des mod4les utilissC Ces param4tres matriaux sont
ensuite souent di@@iciles A d@inir7 en raison du manque de donnes exprimentales
ou des probl4mes de recala!eC L'utilisation d'un mod4le et sa di@@usion
s'accompa!ne donc ncessairement d'une procdure maQtrise d'identi@ication des
param4tres matriauxC
Les mod4les lasto/plastiques dits uni@is apparaissent comme adapts aux
besoins de cette t"4se pour la modlisation de remblais soumis A des sismesC La
modlisation du comportement cyclique des sols ncessite nanmoins un nieau de
complexit le pour les mod4les de comportement aptes A en saisir le plus de
dtailsC
Le mod4le de (u%eux a t c"oisi pour modliser les di@@rentes p"ases de la ie
d'un remblai7 A saoir sa construction7 sa mise en eau et sa tenue au sismeC Ce
mod4le est utilis depuis la @in des annes $;8& par le Centre d',n!nierie
(ydraulique RC,(S de l'-2FC Le C,(7 @ort de son exprience sur ce mod4le7 sou"aite
en disposer dans le lo!iciel par Jlments Finis CodeTAsterC Le traail A suire
consiste donc A int!rer numriquement ce mod4le dans CodeTAsterC
2i@@rents al!orit"mes d'int!ration prsents dans la littrature ont !alement t
prsents dans le but de c"oisir le sc"ma le mieux adapt aux besoins de cette
t"4seC Les aspects de @lexibilit et prcision des rsultats ont t la motiation
ma%eure dans le c"oix de l'al!orit"me type C++M au u des rsultats publis pour
des applications du type c"ar!ement sismique RMan3ari et +rac"at"ananuIit
R#&&$SSC
= Formulation t"orique du mod4le de (u%eux R$;89S =;
4 F!rm#&ti!n t7!ri3e * m!*+#e *e H1e. @,DE:B
= Formulation t"orique du mod4le de (u%eux R$;89SCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=;
=C$ 'elation de comportement de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC=;
=C# 2@inition des ariables d'tat et expression de l'ner!ie libreCCCCCCCCCCCCCCCCCCCCCCCH$
=C#C$ 1ariables d'tatCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCH$
=C#C# Jner!ie libreCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCH#
=C#C= Loi lasto/plastique non linaire de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCH=
=C= Mcanismes lasto/plastiques diatoiresCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCHH
=C=C$ Crit4res diatoires en c"ar!ement monotoneCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCHH
=C=C# Lois d'coulement et d'crouissa!e en c"ar!ement monotoneCCCCCCCCCCCCCCHF
=C=C= Crit4res diatoires en c"ar!ement cycliqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCH:
=C=CH Lois d'coulement et d'crouissa!e en c"ar!ement cycliqueCCCCCCCCCCCCCCCCCH8
=CH Mcanismes isotropesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9&
=CHC$ Crit4re isotrope en c"ar!ement monotoneCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9$
=CHC# Lois d'coulement et d'crouissa!e en c"ar!ement monotoneCCCCCCCCCCCCCC9$
=CHC= Crit4re isotrope en c"ar!ement cycliqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9#
=CHCH Lois d'coulement et d'crouissa!e en c"ar!ement cycliqueCCCCCCCCCCCCCCCCC9#
=C9 Traitement des tats de tractionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9H
=CF +aram4tres lastoplastiques du mod4leCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9H
4-, Re#&ti!n *e c!m0!rtement *e H1e.
Le mod4le de comportement des sols de (u%eux a t delopp par les c"erc"eurs
de l'-cole Centrale +aris R-C+S dans les annes $;8& a@in de reprsenter la
r"olo!ie des sols pour des c"ar!ements alterns7 par exemple sous sismeC Cette
relation de comportement de mcanique des sols est un mod4le multi/mcanismes7
caractris par deux @ois quatre sur@aces de c"ar!e aec crouissa!e : trois relies
A des mcanismes diatoires et une A un mcanisme isotrope7 d@inies pour des
tra%ets monotones et des tra%ets cycliquesC Les mcanismes diatoires sont d@inis
sur trois plans @ixes7 ce qui induit une ort"otropie de comportement du solC Les
mcanismes sp"riques reproduisent la @orte non/linarit du comportement des
!omatriaux sur un c"emin de c"ar!ement isotropeC
Au Laboratoire MSSMat de l'-C+7 il existe plusieurs ersions du mod4le de (u%eux
mises en bure dans le lo!iciel lments @inis G-F2yn :
une ersion 1& int!re en explicite7 aec les Hx# mcanismes
d'crouissa!e dans un rep4re cartsien @ixe R ( , , - , . ) ou ( r , 0, .) RCosta
2'A!uiar7 #&&8SS7 et une lasticit non linaireC Ce mod4le correspond au
mod4le implant7 en implicite7 dans le cadre de cette t"4se dans le lo!iciel
CodeTAster [
une ersion 1$7 dite ,SOG-O7 exprime en contraintes principales7 sur le
rep4re dtermin au pas prcdent puis ractualis7 tablie par +iccue33u
R$;;$S mais peu exprimente par l'-C+ [
une ersion 1#7 dite G-OMAT7 oZ les crit4res de plasticit sont exprims
dans les plans de cisaillement et de contraintes normales7 sur un A trois des
plans @ixesC -lle est ddie aux matriaux co"rents reprsentant une
anisotropie initiale comme de la ma0onnerie et des roc"es7 oZ des ariables
d'endomma!ement Rquatre pour c"aque direction de @issuration : amplitude
H& =C$ 'elation de comportement de (u%eux
et directionS ont t a%outes par rapport au mod4le de base lasto/
plastiqueC Cette extension du mod4le permet de reprsenter la @issuration et
la baisse de raideur anisotrope dans les plans perpendiculaires A la
@issurationC Ce mod4le a t appliqu en tra%et cyclique dans le cadre de la
t"4se de +iccue33u R$;;$SC Modaressi R#&&=S prsente l'application de ce
mod4le aux panneaux de ma0onnerie et aux roc"esC
Une ersion 1= RAubry et alC7 $;;&S7 ddie aux inter@aces7 utilise
notamment dans la t"4se de Costa d'A!uiar R#&&8S7 qui s'est intresse aux
inter@aces sol<pieu et A la localisation des d@ormations autour des pieuxC
Cette @ormulation est utile pour reprsenter les sur@aces de rupture d'une
structure en !omatriaux7 en poursuite d'un calcul reposant sur une
cinmatique de milieux continusC Les discontinuits estimes sont a%outes A
partir de l'obseration des 3ones A @ort !radient de d@ormationC Ces
mod4les ont !alement t utiliss pour modliser des discontinuits
cinmatiques situes A l'intrieur d'un massi@ roc"eux RLope3/Caballero
R#&&=aSS ou de roc"e RModaressi et Aubry R$;8;SSC
Le mod4le dcrit ci/dessous correspond au mod4le indic 1&C
C"acun des plans diatoires7 indic par k 7 est d@ini par les ecteurs de base
(
e
i
k
, e
j
k
)
7 extraits de la base (
e
1
, e
2
, e
3
) de l'espace A trois dimensionsC On note
les indices :
i
k
= 1+m) ( k , 3)
j
k
= 1+m) ( k+1, 3)
R=C$S
Rem&r3e $
+our les modlisations en d@ormations planes R#2/+LA*S7 le plan k=3
correspond au plan (
e
1
, e
2
) du mod4leC
Le mod4le comporte une lasticit non linaire contrMle par le module d'6oun!
dpendant de la pression de con@inementC Le coe@@icient de +oisson est suppos
constantC
Un crit4re limite tridimensionnel proc"e de celui de Mo"r/Coulomb est considr
pour prendre en compte l'in@luence de la contrainte moyenne e@@ectie sur la raideur
du sol et des caractristiques de ruptureC Le concept d'tat critique est !alement
int!r A ce mod4le pour reprsenter le coupla!e entre les contraintes diatoires et
les ariations de olume et @ormuler l'crouissa!e isotrope li au milieu !ranulaireC
Un crouissa!e cinmatique est a%out pour reprsenter le comportement cyclique
des sols7 coupl A l'crouissa!e en densit du solC
Le mod4le de (u%eux est exprim en contraintes e@@ecties dans le cas d'une
modlisation couple "ydro/mcanique : la pression "ydrostatique du @luide n'est
pas prise en compte par le mod4le de (u%eux explicitementC Ce mod4le a t
= Formulation t"orique du mod4le de (u%eux R$;89S H$
tendu au comportement des sols non saturs dans le cadre de la t"4se de Abou/
)eIr R$;;9S et aux c"ar!ements non isot"ermes RLaloui R$;;9S [ Modaressi et Laloui
R$;;:S [ Modaressi et ModaressiR$;;9SSC
4-/ D2initi!n *es ;&ri&%#es *8t&t et e.0ressi!n *e #8ner5ie
#i%re
4-/-, >&ri&%#es *8t&t
Les ariables serant A dcrire l'tat du point matriel sont les suiantes :
c : tenseur de d@ormation [
c
p
: tenseur de d@ormation plastique : on note spcialement
c
v
p
=tr c
p
=c
ij
p
/
ji
la d@ormation plastique olumique7 / tant le tenseur
identitC
r
k
m
: les @acteurs de mobilisation des mcanismes diatoires en tra%et
monotone : ils interiennent pour l'crouissa!e isotrope des sur@aces de
c"ar!e diatoires [
r
k
c
les @acteurs de mobilisation des mcanismes diatoires cycliques : ils
interiennent pour l'crouissa!e mixte Risotrope et cinmatiqueS des sur@aces
de c"ar!e diatoires cycliques [
r
4
m
: le @acteur de mobilisation du mcanisme isotrope en tra%et monotone :
il interient comme crouissa!e isotrope de la sur@ace de c"ar!e [
r
4
c
: le @acteur de mobilisation du mcanisme isotrope cyclique : il
interient pour l'crouissa!e mixte Risotrope et cinmatiqueSC
Les diers mcanismes d'olution lasto/plastique @ont interenir des ariables
d'crouissa!e : les @acteurs de mobilisation et la d@ormation olumique plastique
cumule7 c
v
p
7 commune A l'ensemble des mcanismes et %ouant le rMle de
ariable de coupla!eC
+our simpli@ier les critures7 le tenseur des contraintes e@@ecties est not c et la
pression de con@inement isotrope e@@ectie p est d@inie par la relation
p=1/ 3tr ( c) C +our c"aque mcanisme plastique rattac" A un plan k 7 on note
par :
c
( k)
=0
(k )
c0
( k )
R=C#S
les contraintes considres dans le plan k 7 oZ
0
( k)
dsi!ne le tenseur
symtrique de pro%ection sur le plan de base (
e
i
k
, e
j
k
) 7 de normale e
k
:
0
( k)
=e
i
k
e
j
k
+e
j
k
e
i
k
R=C=S
aec i
k
et j
k
d@inis par la relation =C$C
H# =C# 2@inition des ariables d'tat et expression de l'ner!ie libre
Le tenseur
c
( k)
s'crit @inalement sous la @orme explicite suiante :
c
( k)
=c
i
k
i
k
e
i
k
e
i
k
+c
j
k
j
k
e
j
k
e
j
k
+c
i
k
j
k
e
i
k
s
e
j
k
R=CHS
La pression de con@inement du plan k est tablie suiant la @ormule :
p
k
( c) =
1
2
tr
(
c
(k )
)
R=C9S
+our les mcanismes diatoires7 le tenseur des contraintes diatoires
1
(k )
doit
Btre d@ini de la @a0on suiante :
1
(k )
( c)=c
( k )
p
k
( c) /
(k )
R=CFS
On note en@in la norme de 1on Mises du tenseur des contraintes diatoires
1
(k )
:
q
k
( c)=1
( k)
( c)
2"
2D
=
.
1
2
( 1
ij
)
( k)
( 1
ij
)
(k )
R=C:S
+ar ailleurs7 plusieurs ariables d'"istoire sont ncessaires A la d@inition des
di@@rents mcanismes cycliquesC Une description @ine de ces ariables sera
prsente aux para!rap"es Y=C= et Y=CH C L'olution de ces ariables est
discontinue et correspond aux tats matriaux atteints au moment du dc"ar!ement
du mcanisme considr :
p
H
: ariable scalaire mmoratrice7 enre!istrant la aleur de la pression
de con@inement p( c) [
c
vH
p
: ariable scalaire mmoratrice7 enre!istrant la aleur de la
d@ormation plastique olumique [
p
kH
: ariable scalaire mmoratrice7 enre!istrant la aleur de la pression
de con@inement du plan k 7 p
k
[
1
(k ) H
: ariable tensorielle mmoratrice7 enre!istrant la aleur du diateur
des contraintes
1
(k )
du plan k [
1
(k ) H
c
: ariable tensorielle mmoratrice7 enre!istrant la aleur du diateur
des contraintes N modi@ies O 1
(k )
c
(
c , c
v
p
, r
k
c
)
du plan k C
4-/-/ ner5ie #i%re
On note l'ner!ie libre par la somme d'une contribution lastique et d'une
contribution d'crouissa!e :
F
(
c( ') , c
p
, r
k
K
)
=F
(l+s
( c( ') , c
p
)+H
(cr
(
c
v
p
, r
k
K
)
R=C8S
pour k 1,4 et K| m, c C
La dissipation t"ermodynamique est obtenue par di@@rence A partir de la densit de
= Formulation t"orique du mod4le de (u%eux R$;89S H=
puissance de d@ormation7 ceci dans un processus isot"erme :
D=cc (
')
F
(
c( ') , c
p
, r
k
K
)
=c
ij
c
ji
p
H
(cr
(
c
v
p
, r
k
K
)
R=C;S
Le coupla!e t"ermique n'est pas rsoluC On ne peut donc pas di@@rencier la densit
de puissance dissipe du taux d'ner!ie d'crouissa!e7 correspondant A un terme
d'ner!ie bloqueC Cependant7 c
ij
c
ji
p
n'est pas ncessairement positie7
contrairement A D C La partie lastique du mod4le de (u%eux est non linaire : il
est di@@icile d'en extraire l'expression du potentiel F
(l+s
( c ( ') , c
p
) C
Comme le mod4le de comportement de (u%eux poss4de une lasticit non linaire
particuli4re Rc@ Y=C#C= S7 on ne peut pas donner l'expression int!re de l'ner!ie
libre du mod4le de (u%euxC
-n reanc"e7 en considrant le cas particulier de l'lasticit linaire A temprature
constante et un mod4le de (u%eux rduit A un unique mcanisme diatoire7
Modaressi et alC R$;;;S7 reprenant une partie des traaux de Modaressi et alC R$;;HS
sur les mod4les de type Cam/Clay aec une loi de dilatance de type 'oscoe7 ont
tabli l'expression de l'ner!ie libre et de la dissipation du mod4le de (u%euxC
L'application des principes de la t"ermodynamique a montr que le seuil de
plasticit du mod4le de (u%eux Rdans sa @ormulation standard7 (u%eux R$;:;SS ne
correspondait pas exactement A la @ormulation dcoulant de l'ner!ie libre et de la
dissipation tablieC
Le point de di@@rence concerne l'expression de la pression critique7
#
c
C La
pression critique introduite dans le mod4le de (u%eux7 identique A celle du mod4le
Cam/Clay7 ne dpend pas des d@ormations diatoires plastiques7 mais
uniquement des d@ormations olumiques plastiques Rquation =C$=SC
4-/-4 L!i #&st!"0#&sti3e n!n #in&ire *e H1e.
On admet que le module d'6oun! du sol dpend de la pression de con@inement
$
e@@ectie p' ( c) par une loi puissance7 dans le domaine des compressions
p' ( c)0 C Les modules de compression et de cisaillement sont d@inis comme
des @onctions non linaires de la pression isotrope :
K ( p' ) = K
ref
(
p'
#
ref
)
n
e
G( p' ) = G
ref
(
p'
#
ref
)
n
e
R=C$&S
Les modules initiaux de cisaillement G
ref
et de compressibilit K
ref
sont
mesurs A la pression de con@inement de r@rence #
ref
et
n
e
prcise le de!r
de non/linarit C
Le cas
n
e
=0
correspond A l'lasticit linaireC
$ "ypot"4se issue de la t"orie de (ert3 applique aux assembla!es de billes puis
!nralise aux matriaux !ranulaires7 )iare3 et (ic"erR$;;HSC
HH =C# 2@inition des ariables d'tat et expression de l'ner!ie libre
-n pratique7 cette loi conduit A une plus !rande ri!idit du sol au @ur et A mesure
que l'on descend en pro@ondeurC
4-4 Mc&nismes #&st!"0#&sti3es *;i&t!ires
On consid4re trois mcanismes diatoires : un dans c"aque plan de !lissement
k de normale
e
k
C Une distinction est nanmoins @aite pour di@@rencier le
comportement monotone du sol et le comportement sous c"ar!ement cycliqueC Une
sur@ace de c"ar!e dite monotone est sollicite pour des tats de contrainte
maximaux %amais subis auparaant par le matriauC 2es sur@aces de c"ar!e
cycliques sont introduites7 caractrises par des ariables d'"istoire A olution
discontinue7 pour des cycles de c"ar!ement Rsur@ace actie d4s la dc"ar!e A partir
de l'tat atteint A la @in du tra%et monotoneSC
4-4-, Crit+res *;i&t!ires en c7&r5ement m!n!t!ne
Les mcanismes diatoires dans le plan
(
e
i
k
, e
j
k
)
pour un tra%et monotone et
ier!e sont r!is par le crit4re :
f
k
m
( c ,c
v
p
, r
k
m
)=q
k
( c)+p
k
( c) F ( p
k
(c) , c
v
p
) r
k
m
<0 R=C$$S
aec p
k
( c) et q
k
( c) d@inis en =C9 et =C: A partir des contraintes e@@ecties c C
La @onction qui caractrise la rsistance du sol en @onction de la d@ormation
olumique plastique prend la @orme :
F ( p
k
( c) ,c
v
p
)="
(
1b ln
p
k
( c)
#
c
(
c
v
p
)
)
R=C$#S
Les expressions prcdentes @ont interenir deux noueaux param4tres matriau :
"=sin
pp
aec
pp
l'an!le de @rottement matriau A l'tat critique [
b param4tre positi@ contrMlant la @orme de la sur@ace de c"ar!eC ,l arie
entre & et $7 d'une sur@ace de c"ar!e de type Mo"r/coulomb A une sur@ace
de c"ar!e de type Cam/ClayC
La ariable d'crouissa!e r
k
m
olue entre une aleur initiale r
(l+
7 param4tre
matriau caractrisant la taille du seuil A l'tat initial et l'unit correspondant A la
sur@ace de plasticit par@aite pour ce mcanismeC
Les crit4res Rou sur@aces de c"ar!e plastiqueS @ont interenir la @onction de pression
critique7 qui caractrise la rsistance du sol7 dpendant de l'indice des ides dans le
matriau Rcrouissa!e en densitS :
#
c
(
c
v
p
)
=#
c!
exp
(
c
v
p
)
R=C$=S
2eux param4tres matriau interiennent dans la d@inition de cette pression
= Formulation t"orique du mod4le de (u%eux R$;89S H9
critique : la pression critique de r@rence initiale #
c!
Rn!atieS et 7 la
compressibilit plastique du matriau RpositieSC La pression critique croQt en aleur
absolue lorsque le matriau subit une d@ormation plastique olumique n!atie
Rcompression de l'c"antillonSC
Le crit4re tabli en =C$$ s'inspire @ortement du mod4le de Cam/Clay ori!inalC
*anmoins7 l'expression a t modi@ie par (u%eux R$;:;S7 car ce mod4le sous/
estimait les d@ormations diatoires pour des ar!iles surconsolidesC +our corri!er
cette @aiblesse7 la sur@ace de c"ar!e a t modi@ie en introduisant une dpendance
en @onction des d@ormations diatoires7 ia les @acteurs de mobilisation7 sans
modi@ier la r4!le d'coulement olumique de 'oscoe R$;98SC
L'illustration =C$ permet de isualiser l'e@@et du param4tre de @orme b et du @acteur
de mobilisation r
k
m
sur le seuil du mcanisme par rapport A la droite d'tat critique
et la droite d'tat caractristique7 qui tient compte du passa!e d'un tat contractant A
dilatantC Les aleurs prsentes sont @actices mais permettent de rendre compte de
l'e@@et des param4tres ou ariables d'crouissa!e sur la @orme de la sur@ace de
c"ar!e diatoire monotoneC
Rem&r3e $
Le crit4re monotone peut Btre re@ormul en normalisant la contrainte diatoire
q
k
( c) par le terme
(
p
k
( c) F ( p
k
( c) ,c
v
p
) )
7 de telle sorte qu'il peut Btre reprsent
!omtriquement par un cercle de rayon r
k
m
:
f
k
m
=
q
k
( c)
p
k
( c) F ( p
k
(c) , c
v
p
)
r
k
m
<0
R=C$HS
Cette expression est rendue possible pour tout tat de contrainte !arantissant
p
k
( c) 0 C +ar la suite7 la quantit
q
k
( c)
p
k
( c) F
(
p
k
( c) , c
v
p
)
sera note q
k
( c) et le
tenseur normalis de la partie diatoire des contraintes sera not (
1
k
)
ij
C
Illustration '.1 : 4urface de c-arge d5iatoire monotone reprsente dans le plan (
p
k
, q
k
)
HF =C= Mcanismes lasto/plastiques diatoires
4-4-/ L!is *8c!#ement et *8cr!iss&5e en c7&r5ement m!n!t!ne
Les taux de d@ormation plastique se dcomposent en une partie purement
diatoire7 respectant une loi d'coulement associe par rapport A la sur@ace de
c"ar!e et une partie olumique7 non associe7 respectant les principes de la loi de
dilatance de 'oscoe R$;98SC L'expression de la loi d'coulement est la suiante :
( c
k
m
)
ij
p
=
\
k
m
( 1
k
m
)
ij
=
\
k
m
(
(
1
k
)
ij
2q
k
( c)
o( r
k
m
)
2
(
sin+
q
k
( c)
p
k
( c)
)
(
/
k
)
ij
)
R=C$9S
Le tenseur unit est d@ini par la relation suiante : (
/
k
)
=e
ik
e
ik
+e
jk
e
jk
Le tenseur d'ordre # 1
(k )
m
dsi!ne la direction d'coulement plastiqueC L'an!le
caractristique correspond A l'an!le de @rottement associ A une ariation nulle
de olume RLuon! R$;8&SSC Cet an!le diise le plan (
p
k
, q
k
) en un domaine
contractant R
q
k
sin( p
k
) S et un domaine dilatant R q
k
>sin( p
k
) SC o est
un param4tre matriau d@ini comme le coe@@icient de dilatanceC
La @onction ( r ) permet de contrMler l'amplitude de la ariation de olume lors
d'un coulement plastique diatoireC -n conditions draines7 en dessous d'un
nieau de d@ormations7 la ariation de olume reste nulle sous c"ar!ement
diatoireC -n conditions non draines7 l'olution de la pression interstitielle dpend
notamment des d@ormations diatoiresC L'expression de la @onction ( r ) est
tablie au re!ard de ces rsultats exprimentaux :
( r ) =
0 r r
h-s
- )m+ine pse')3(l+stiq'e
(
rr
h-s
r
m)b
r
h-s
)
m
si r
m)b
>r>r
h-s
- )m+ine h-st(r(tiq'e
1 r>r
m)b
- )m+ine pl+stiq'e
R=C$FS
Les param4tres matriaux r
h-s
et r
m)b
dlimitent les @ronti4res du domaine
"ystrtiqueC Ce domaine est relati@ aux petites d@ormations ( 1%) et a un rMle
tr4s important pour le comportement du mod4le sous sismeC
La loi d'olution suiie par la ariable interne r
k
m
est r!ie par les mBmes
multiplicateurs plastiques
\
k
m
que ceux introduits pour la d@inition de (
c
p
) :
r
k
m
=
\
k
m
l
k
m
=
\
k
m
(1r
k
m
)
2
+
R=C$:S
Le param4tre + a un rMle important pour la construction du module d'crouissa!eC
Une aleur @aible de + conduit A atteindre rapidement le diateur maximal de
contraintesC L'approc"e la plus simple7 considrant + comme une constante7 ne
permet pas de respecter le comportement exprimental des matriauxC La aleur de
= Formulation t"orique du mod4le de (u%eux R$;89S H:
+ olue en @onction des d@ormations diatoiresC (u%eux R$;89S propose la
relation suiante :
+=+
c
+(r
k
m
) ( +
m
+
c
)
R=C$8S
+
m
et +
c
sont deux param4tres matriaux Rstrictement positi@sSC L'olution des
@acteurs de mobilisation est strictement positieC 2e plus7 on impose r
k
m
<1 C
Les sur@aces de c"ar!e diatoires monotones sont considres acties tant que la
aleur normalise
q
k
( c)
p
k
( c) F( p
k
( c) , c
v
p
)
est !ale A la aleur maximale "istorique
atteinte par le de!r de mobilisation monotone r
k
m
C
]uand un c"ar!ement sollicite une dc"ar!e des mcanismes monotones7 il @aut
considrer les mcanismes diatoires cycliques7 d@inis tan!ents aux seuils des
mcanismes monotones dans le plan (
1
k
)
ij
C Une succession de c"ar!e<dc"ar!e<
rec"ar!e conduit A modi@ier l'expression du seuil cyclique tant que cela s'a4re
ncessaireC
4-4-4 Crit+res *;i&t!ires en c7&r5ement c(c#i3e
La cration d'un mcanisme diatoire N @ils O est initie lorsqu'une dc"ar!e
apparaQt au nieau d'un mcanisme monotoneC Si le seuil de plasticit du
mcanisme N @ils O est @ranc"i7 le mcanisme cyclique est alors considr comme
acti@C
Une cration successie de mcanismes cycliques est possible7 lorsque des
c"an!ements de direction de c"ar!ement interiennentC
,l est !alement possible apr4s dc"ar!e puis rec"ar!e par exemple7 qu'un
mcanisme monotone succ4de A un mcanisme cyclique7 lorsque l'tat de
contrainte entre en contact aec le seuil "istorique le plus crouiC
L'illustration =C# Rpa!e 9&S permet de prsenter pour un c"emin de c"ar!ement
donn l'olution des sur@aces de c"ar!e monotone et cycliques du mod4le de
(u%euxC +our @aciliter la lisibilit du !rap"ique7 certains termes c"an!ent
d'expression7 tels que t
( k)
H
-n
k
Rd@ini A l'qC=C##S7 (
1
k
)
ii
-(
1
k
)
1
et (
1
k
)
ij
-(
1
k
)
2
Rd@inis A partir de l'qC=C$HSC
Les sur@aces de c"ar!e des mcanismes diatoires cycliques prennent
l'expression !nrale suiante :
f
k
c
(c , c
v
p
, r
k
c
)=q
k
c
(c , c
v
p
, r
k
c
)+p
k
( c) F ( p
k
(c) , c
v
p
) r
k
c
<0 R=C$;S
oZ q
k
c
(
c ,c
v
p
, r
k
c
)
est une ariante de q
k
( c) :
q
k
c
( c ,c
v
p
, r
k
c
)=1
(k )
c
( c , c
v
p
, r
k
c
)
2"
2D
R=C#&S
H8 =C= Mcanismes lasto/plastiques diatoires
aec
1
( k)
c
(c ,c
v
p
, r
k
c
)=1
(k )
(c)p
k
( c) F (c , c
v
p
) ( 4
( k)
H
+r
k
c
t
( k)
H
) R=C#$S
La ariable d'crouissa!e r
k
c
olue entre la aleur initiale r
(l+
c
d@inissant le
domaine initial du mcanisme cyclique diatoire et le de!r de mobilisation
monotone r
k
m
C Cette ariable introduit l'e@@et d'crouissa!e au cisaillement pour les
mcanismes diatoires cycliquesC
Le tenseur mmoire 4
(k )
H
7 d@inissant le point de tan!ence entre les sur@aces
N @ils O et N p4re O7 et le ecteur normal t
( k)
H
indiquant la direction de c"ar!ement
prcdant le c"an!ement de direction sont donns par les relations suiantes :
( 4
k
H
)
ij
=
(
1
k
H
)
ij
p
k
H
( c) F
H
(
c ,c
v
p
)
( t
k
H
)
ij
=
(
1
k
cH
)
ij
q
k
cH
(c , c
v
p
, r
k
c
)
R=C##S
Rem&r3e $
La sur@ace de c"ar!e cyclique peut !alement Btre exprime comme un cercle de
rayon r
k
c
:
f
k
c
=
q
k
c
( c, c
v
p
, r
k
c
)
p
k
( c) F ( p
k
( c) ,c
v
p
)
r
k
c
R=C#=S
4-4-9 L!is *8c!#ement et *8cr!iss&5e en c7&r5ement c(c#i3e
L'coulement plastique li A ces mcanismes est associ pour la partie diatoire et
non associ pour la partie olumique7 de @a0on analo!ue au traitement ralis pour
l'coulement plastique issu des mcanismes monotones :
(1
k
c
)
ij
=
(
(
1
k
c
(c , c
v
p
, r
k
c
) )
ij
2q
k
c
( c ,c
v
p
, r
k
c
)
o( r
k
c
)
2 (
sin+
(
1
k
)
mn
: ( 1
k
c
)
mn
2 q
k
c
(c , c
v
p
, r
k
c
) p
k
(c)
)
( /
k
)
ij
)
R=C#HS
L'olution de la ariable d'crouissa!e r
k
c
est dtermine et c"oisie de @a0on A
assurer l'!alit suiante pour les ariables monotones et cycliques :
h
k r
K
=f
k ,r
k
m
l
k
m
=f
k ,r
k
c
l
k
c
R=C#9S
Le module d'crouissa!e h
kr
K
a la mBme expression @inale pour les mcanismes
monotones et cycliquesC A partir de l'expression tablie pour le mcanisme
= Formulation t"orique du mod4le de (u%eux R$;89S H;
monotone7 l'olution de r
k
c
s'crit :
r
k
c
=
\
k
c
(1r
k
c
)
2
k
c
+
c
+( r
k
c
) ( +
m
+
c
)
R=C#FS
aec
k
c
=
2 q
k
c
2q
k
c
( 1
k
c
)
mn
: ( t
k
H
)
mn
R=C#:S
L'obtention de la @onction
k
c
n'a pu Btre tablie qu'apr4s la mise en place de tests
de non r!ression mettant en aant une rotation de l'tat de contraintes RY;C= 7
pC#&;SC La @ormulation explicite de cette @onction n'apparaQt pas dans les articles de
r@rence d@inissant le mod4le de (u%eux R(u%eux7 $;89 [ Aubry et Modaressi7
$;;FSC
C!mment&ires sr #8i##str&ti!n 4-/ $
La premi4re p"ase reprsente7 A partir d'un tat de contrainte isotrope7 un
c"ar!ement diatoire monotone Rpassa!e du point & au point ASC
Le troisi4me sc"ma prsente la con@i!uration tablie lorsqu'une dc"ar!e interient
au nieau du c"ar!ement diatoireC Un mcanisme diatoire cyclique est cr et
d@ini par le couple de ariables d'"istoire
(( 4
k
H
)
ij
,
(
n
k
)
ij
)
Rpoint )SC
Le quatri4me sc"ma prsente l'crouissa!e mixte suii par une sur@ace de c"ar!e
diatoire cycliqueC Le centre du N cercle O Rreprsentant la sur@ace de c"ar!e
cycliqueS se dplace le lon! de l'axe d@ini par le tenseur (
n
k
)
ij
Rpassa!e du point
) au point CSC
Le cinqui4me sc"ma reprsente le cas d'une nouelle dc"ar!e cyclique7 qui
conduit A une olution discontinue du couple des ariables d'"istoire
(( 4
k
H
)
ij
,
(
n
k
)
ij
)
C On consere nanmoins les in@ormations relaties au mcanisme
N p4re O cyclique prcdent Rcercle en pointillsSC On remarquera que la direction
retenue pour d@inir (
n
k
)
ij
est tablie suiant la direction entre le centre du cercle
du mcanisme N p4re O et le point de c"ar!ement correspondant A la dc"ar!e RqC
=C##SRpassa!e du point C au point 2SC
Le sixi4me sc"ma prsente A noueau l'crouissa!e mixte de la sur@ace de c"ar!e
cyclique du mcanisme N @ils ORpoint FSC
Le septi4me sc"ma prsente plusieurs p"ases de l'olution des sur@aces de
c"ar!e diatoire :
dans un premier temps7 la sur@ace de c"ar!e du mcanisme N @ils O s'est
crouie %usqu'au nieau prcdemment atteint par la sur@ace de c"ar!e du
mcanisme N p4re OC Ce c"ar!ement conduit A rtablir le mcanisme
cyclique N p4re ORpassa!e du point F au point GS [
la sur@ace de c"ar!e du mcanisme N p4re O continue A s'crouir %usqu'A
atteindre le nieau "istorique maximum de c"ar!ement diatoire Rpoint (SC
Le mcanisme monotone est alors racti le lon! de ce c"emin de
9& =C= Mcanismes lasto/plastiques diatoires
c"ar!ementC L'crouissa!e subi par cette sur@ace de c"ar!e monotone est
uniquement isotrope Rpoint ?SC
4-9 Mc&nismes is!tr!0es
Sur des c"emins de c"ar!ement isotrope7 les di@@rents mcanismes diatoires ne
sont pas sollicitsC Or7 les !omatriaux prsentent une @orte non/linarit sur ces
c"emins de c"ar!ementC 2ans le domaine des compressions p( c) 0 7 un
comportement lasto/plastique est identi@i pour les c"emins ier!es en
compression et un autre comportement7 contrMl par une ariable d'"istoire locale7
pour les c"ar!ements cycliques Roir illustration =CHSC Ces mcanismes !n4rent
Illustration '.2 : (5olution des surfaces de c-arge des mcanismes d5iatoires sui5ant un tra6et
de c-argement alatoire 72&.!1.2'8. %es points ronds indi)uent les c-angements de direction de
c-argement.
= Formulation t"orique du mod4le de (u%eux R$;89S 9$
uniquement des d@ormations olumiques et sont coupls aux mcanismes
diatoires par la d@ormation olumique plastiqueC
4-9-, Crit+re is!tr!0e en c7&r5ement m!n!t!ne
Le mcanisme isotrope pour un tra%et monotone est r!i par le crit4re :
f
4
m
(c ,c
v
p
, r
4
m
)=p (c)+ #
c!
exp(c
v
p
) r
4
m
<0 R=C#8S
2eux noueaux param4tres matriaux interiennent dans l'expression de ce crit4re
Rquation =C#8SC Le param4tre d@init la distance entre la droite d'tat critique et
la droite de consolidation isotrope dans le plan ( lnp, e) Roir illustration =C=SC Le
rayon lastique r
(l+
s
caractrise la taille du seuil A l'tat lastique et interient dans
l'expression de la ariable d'crouissa!e r
4
m
=( r
4
m
+r
(l+
s
)
C
Rem&r3e : -n pratique7 A l'tat initial7 la aleur r
4
m
est calcule explicitement de
@a0on A quilibrer le seuil associ au mcanisme isotrope monotoneC
4-9-/ L!is *8c!#ement et *8cr!iss&5e en c7&r5ement m!n!t!ne
La loi d'coulement plastique pour ce mcanisme est associe et sa contribution
aux taux de d@ormations plastiques prend la @orme suiante :
( c
4
m
)
ij
p
=
\
4
m
(
1
4
m
)
ij
=
\
4
m p
3p
/
ij
=
1
3
\
4
m
sign( p) /
ij
R=C#;S
\
4
m
dsi!ne le multiplicateur plastique sp"rique monotone7 qui doit Btre positi@C
Illustration '.' : Dfinition du param$tre utilis dans l'e9pression des seuils des
mcanismes isotropes
9# =CH Mcanismes isotropes
On notera sign( p)=
p
p
7 ce qui donne en pratique
\
4
m
sign( p)<0 C Ce
mcanisme !n4re par consquent uniquement des d@ormations de contractanceC
La loi d'olution suiie par le de!r de mobilisation r
4
m
est pilote par le mBme
multiplicateur plastique
\
4
m
:
r
4
m
=
\
4
m
l
4
m
=
\
4
m
(1r
4
m
)
2
c
m
#
ref
#
c
(c
v
p
)
R=C=&S
c
m
est un param4tre matriau positi@C L'olution r
4
m
doit tou%ours Btre positie et
le de!r de mobilisation doit tou%ours rester in@rieur A l'unit7 r
4
m
<1 C
4-9-4 Crit+re is!tr!0e en c7&r5ement c(c#i3e
2ans le cas d'un c"ar!ement isotrope cyclique7 un mcanisme isotrope cyclique est
d@ini et construit suiant la mBme approc"e que celle prsente pour les
mcanismes diatoires cycliquesC L'expression du crit4re de ces mcanismes est
la suiante :
f
4
c
(c ,c
v
p
, r
4
c
, 4
4
H
)=p
c
(c ,c
v
p
, 4
4
H
)+ #
c
(c
v
p
) r
4
c
<0 R=C=$S
aec :
4
4
H
=
p
H
#
c
(
c
v
p
)
H
p
c
(
c , c
v
p
, 4
4
H
)
= p( c)+ #
c
(
c
v
p
)
4
4
H
R=C=#S
p
H
et
#
c
( c
v
p
)
H
dsi!nent les aleurs atteintes par p( c) et par #
c
(
c
v
p
)
au
point de dc"ar!eC Le param4tre r
(l+
sc
] 0,1 7 souent initialis A la mBme aleur
que r
(l+
s
7 caractrise la taille du seuil correspondant A l'tat lastique et interient
dans l'expression de la ariable d'crouissa!e r
4
c
=( r
4
c
+r
(l+
sc
)
C
4-9-9 L!is *8c!#ement et *8cr!iss&5e en c7&r5ement c(c#i3e
La contribution du mcanisme isotrope cyclique au taux des d@ormations plastiques
a une @orme identique A celle du mcanisme isotrope monotone :
( c
4
c
)
ij
p
=
\
4
c
( 1
4
c
)
ij
=
\
4
c p p
c
3pp
c
/
ij
=
1
3
\
4
c
sign( p) sign( p
c
) /
ij
R=C==S
\
4
c
dsi!ne le multiplicateur plastique sp"rique cyclique7 qui doit Btre positi@C
= Formulation t"orique du mod4le de (u%eux R$;89S 9=
La loi d'olution suiie par la ariable d'crouissa!e r
4
c
est pilote par le mBme
multiplicateur plastique
\
4
c
C Comme introduit pour le de!r de mobilisation
monotone r
4
m
7 le de!r de mobilisation cyclique respecte une expression
quialente pour son olution :
r
4
c
=
\
4
c
l
4
c
=
\
4
c
(1r
4
c
)
2
2c
c
#
ref
#
c
( c
v
p
)
R=C=HS
c
c
est un param4tre d'crouissa!e positi@C L'olution
r
4
c
doit tou%ours Btre
positie et le de!r de mobilisation doit tou%ours rester in@rieur au de!r de
mobilisation monotone7 r
4
c
<r
4
m
Rcondition !alement alable pour les mcanismes
diatoiresSC
Le @acteur 1/ 2 de la relation =C=H est issu d'une condition similaire A celle
exprime pour les mcanismes diatoires monotones et cycliques Roir qC =C#9SC
C!mment&ires sr #8i##str&ti!n 4-9 $
La p"ase de c"ar!e monotone correspond A l'crouissa!e isotrope du mcanisme
isotrope monotone %usqu'au nieau de c"ar!ement
p
H
1
Rpoint ASC
La p"ase suiante correspond A une dc"ar!e conduisant A la cration d'un
mcanisme isotrope cycliqueC La ariable n permet d'indiquer s'il s'a!it d'un
mcanisme cyclique de N d/compression O !lobale de l'c"antillon R n=1 S ou
bien de N re/compression O R n=1 SC Cette premi4re dc"ar!e interient %usqu'A
atteindre la aleur
p
H
2
en contraintes isotropes totales Rpoint )SC
Illustration '.* : (5olution des surfaces de c-arge des mcanismes isotropes sui5ant un
tra6et de c-argement alatoire.
9H =CH Mcanismes isotropes
La troisi4me p"ase correspond A une N re/compression O de l'c"antillon7 oZ le
mcanisme cyclique est d@ini par n , r
is)
c5
, p
H
2
Rpoint CSC
4-: Tr&itement *es t&ts *e tr&cti!n
MBme si le r!ime "abituel de c"ar!ement du sol est la compression7 il est possible
de se trouer en tat de traction7 soit lors de l'int!ration numrique du mod4le7 soit
simplement au cours des itrations de rsolution du syst4me non linaire des
quations d'quilibreC ,l est donc ncessaire de proir un comportement en
tractionC ,l est ainsi propos un mcanisme lasto/plastique par@ait pour c"aque plan
de !lissement k 7 aec une co"sion nulleC
Un crit4re est tabli sur la pression de con@inement p
k
( c) dans le plan k :
f
k
tr
( c) =p
k
( c)p
0
tr
<0 R=C=9S
Aec p
0
tr
=10
!
#
ref
C
La loi d'coulement est associe :
( c
k
tr
)
ij
p
=
\
k
tr
(
1
k
tr
)
ij
=
\
k
tr 1
2
(
/
k
)
ij
R=C=FS
Les d@ormations olumiques plastiques !nres ne contribuent pas A l'olution
de la ariable de coupla!e c
v
p
des autres mcanismes du mod4leC
Les mcanismes plastiques peuent Btre considrs acti@s simultanment aux
mcanismes diatoires du mod4leC
4-< P&r&m+tres #&st!0#&sti3es * m!*+#e
L'identi@ication des di@@rents param4tres du mod4le est un en%eu essentiel pour la
maQtrise du mod4le7 sa di@@usion et son utilisationC Les traaux de Lope3/Caballero
R#&&=a7 #&&:S ont contribu notamment A la mise en place d'une strat!ie
d'identi@ication des di@@rents param4tres du mod4leC L'essentiel des matriaux
tudis et recals aec le mod4le sont issus de sols remanis pour lesquels de
nombreux rsultats exprimentaux sont disponibles dans la littratureC Lope3/
Caballero R#&&=aS s'intressent particuli4rement A la modlisation du comportement
sismique des sols7 tout en s'assurant de conserer une description prcise des
c"ar!ements monotonesC
Le tableau =C$ rsume les param4tres utiliss dans le mod4le de (u%euxC Ces
param4tres sont classs selon leur rMle dans le mod4leC
= Formulation t"orique du mod4le de (u%eux R$;89S 99
Mod4le Jlasticit
Fonction de
c"ar!e
Jcrouissa!e
2omaines de
comportement
Jtat ini/
tial
(u%eux
K
ref
7
G
ref
7 n
e
7
#
ref
pp
7
7 b 7
+
m)n
7 +
c-c
7
7 o 7
,
m
7 c
m)n
7
c
c-c
r
el+
7 r
h-s
7
r
m)b
7 r
el+
is)
#
c!
T&%#e& 4-, $ P&r&m+tres * m!*+#e *e H1e. @L!0eF"C&%&##er!? /AA4&B
Lope3/Caballero R#&&=aS et Modaressi R#&&=S proposent ensuite de classi@ier les
di@@rents param4tres selon leur rMle sur le comportement du sol Rtableau =C#SC ,ls
identi@ient notamment trois cat!ories de param4tres : ceux qui contribuent A la
ri!idit du sol7 ceux qui sont associs A un tat indpendant de l'"istoire du matriau
et en@in ceux qui !4rent l'olution des ariables d'crouissa!eC Finalement7 selon
leurs mt"odes d'obtention7 les param4tres peuent Btre classs dans deux
!roupes distincts : un !roupe relati@ A ceux accessibles A partir des essais in/situ ou
de laboratoire et un second !roupe oZ les param4tres ne peuent pas Btre mesurs
directementC
'i!idit Jtats Jcrouissa!e
2irectement mesu/
rables
Jlasticit ( G , K )
+lasticit
pp
7 7 7
#
c!
r
h-s
*on directement
mesurables
+
m)n
7 +
c-c
b
o 7 ,
m
7 c
m)n
7 c
c-c
7 r
el+
7
r
m)b
7 r
el+
is)
T&%#e& 4-/ $ C#&ssi2ic&ti!n *es 0&r&m+tres * m!*+#e *e H1e. @M!*&ressi?
/AA4B
Une mt"odolo!ie d'identi@ication des param4tres proue est notamment
prsente dans les traaux de Lope3/Caballero R#&&=aS et Modaressi R#&&=SC ,ls ont
propos et test cette mt"odolo!ie sur di@@rents matriaux sableux R(ostun 'F7
Toyoura7 MonetryS et ar!ileux Rar!ile noireSC
Le c"apitre suiant s'attac"e A dtailler l'al!orit"me mis en place pour int!rer
numriquement le mod4le de (u%eux prsent ci/dessus selon un sc"ma implicite
dans le lo!iciel CodeTAsterC
9F =CF +aram4tres lastoplastiques du mod4le
H Mt"ode d'int!ration applique au mod4le de (u%eux 9:
9 Mt7!*e *8int5r&ti!n &00#i3e & m!*+#e *e H"
1e.
H Mt"ode d'int!ration applique au mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9:
HC$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9:
HC# ,nt!ration de l'quation constitutie non linaire lastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCC98
HC= ,nt!ration des quations constituties lasto/plastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC9;
HC=C$ 2omaine potentiel des mcanismes acti@sCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF&
HC=C# +rdiction lastiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF=
HC=C= +"ase de correction : quations non linaires A rsoudreCCCCCCCCCCCCCCCCCCCCCCF9
HC=C=C$ ,trations de correction de *eUtonCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF9
HC=C=C# +"ase de mise A %ourCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF:
HC=C=C= Gestion des c"ecs d'int!ration localeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF:
HC=C=CH Crit4re de coner!ence localCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF8
HC=CH ContrMle de l'olutionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF;
HC=CHC$ Multiplicateurs plastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF;
HC=CHC# 1ariables internesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF;
HC=C9 ContrMle des mcanismes acti@sCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCF;
HCH Tenseur lasto/plastique continuCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:9
HC9 +erspecties d'olutionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC::
9-, Intr!*cti!n
Compte tenu des di@@rents lments prsents au Y#CF Rnotamment la stabilit au
c"ar!ement sismiqueS7 l'al!orit"me d'int!ration utilis pour le mod4le de (u%eux est
la mt"ode implicite de pro%ection du point le plus proc"e RC++MSC La @ormulation
est tablie A partir des traaux de Mialon R$;8=S et de Simo et Taylor R$;89SC
+iccue33u R$;;$S a par ailleurs tudi di@@rents al!orit"mes d'int!ration du mod4le
de (u%eux et prconise pour sa part l'utilisation d'un sc"ma explicite aec contrMle
de l'olution des contraintes et des ariables d'crouissa!e par sous/
incrmentationsC ,l dconseille iement d'utiliser la mt"ode de N Cuttin! +lane O
au u des rsultats obtenusC La taille de discrtisations doit Btre tr4s rduite due aux
@ortes non/linarits prsentes dans le mod4leC ,l s'est !alement intress A un
sc"ma semi/implicite permettant de c"oisir un pas de discrtisation beaucoup plus
!rand7 au prix d'une mise en bure qu'il quali@ie de complexeC Cette qualit
d'int!ration a !alement un coXt en termes d'e@@ort de calculC
Modaressi R#&&=S indique nanmoins qu'une int!ration prcise du mod4le assure
un @onctionnement correct du mod4le et qu'une rponse locale plus prcise peut
conduire A un nombre d'itrations !lobales plus @aible et ainsi compenser ce
surcoXtC Ces derniers points aancs nous conduisent A penser qu'un e@@ort
supplmentaire pour raliser une int!ration implicite du mod4le assurera des
qualits indniables en termes de robustesse et de @iabilit du mod4le7 notamment
pour des c"ar!ements conduisant le sol A des tats instables tels que la
liqu@actionC
+our les para!rap"es suiants7 les indices + @ont r@rence aux aleurs des
inconnues A l'tat coner! apr4s int!ration locale du mod4leC Les indices
@ont7 quant A eux7 r@rence aux aleurs des quantits concernes A l'tat coner!
98 HC$ ,ntroduction
prcdentC
9-/ Int5r&ti!n *e #83&ti!n c!nstitti;e n!n #in&ire #&s"
ti3e
2ans le cas d'une prdiction purement lastique Raucune olution des ariables
d'crouissa!e et des d@ormations plastiquesS7 le nouel tat de contrainte ri@ie
seulement l'quation d'tat suiante :
c
ij
"
=c
ij
#
+A
ijkl
(c
ij
"
) Ac
kl
RHC$S
Le tenseur caractrisant le comportement lastique non linaire A
ijkl
(c
ij
"
)
est une
@onction de l'tat de contrainte s'exprimant sous la @orme suiante :
A
ijkl
(c
ij
"
)=A
ijkl
ref
(
p
"
#
ref
)
n
e
RHC#S
A
ijkl
ref
est le tenseur lastique obtenu A la pression moyenne de r@rence #
ref
Rquation =C$&SC L'quation non linaire RHC$S est rsolue par la mt"ode des s/
cantesC La mt"ode des scantes est base sur un al!orit"me de rec"erc"e du 3ro
d'une @onctionC Cette approc"e est conduite pour une succession de droites7 %usqu'A
obtenir le nieau de prcision sou"aiteC
La prdiction lastique de l'tat de contrainte tablie en HC$ peut Btre en de"ors des
limites du domaine d'lasticit du matriauC ,l est alors ncessaire de distin!uer les
incrments de d@ormations lastiques et plastiques pour assurer A l'tat de
contrainte @inal c
ij
"
de rester sur les seuils des di@@rentes sur@aces de c"ar!e du
mod4le de (u%euxC
2ans le but d'tablir un prdicteur lastique de N meilleure qualit O c
ij
las
RqC HC=S7
la contribution de l'tat de contraintes c
ij
$
d@ini A partir de HC$ est attnue par la
prise en compte de l'tat de contraintes prcdent c
ij
#
C Cette approc"e permet
notamment de limiter les probl4mes de dier!ence de l'al!orit"me d'int!ration
locale interenant par la suite RYHC= SC
,l @aut alors di@@rencier l'tat de contrainte issu de la prdiction lastique c
ij
las
:
c
ij
las
=c
ij
#
+A
ijkl
(
c
ij
#
+c
ij
$
2
)
Ac
kl
=c
ij
#
+Ac
ij
(l+s
RHC=S
de l'tat de contrainte @inal obtenu apr4s prise en compte des coulements plas/
tiques et olution des ariables d'crouissa!e du mod4le :
c
ij
"
=c
ij
#
+A
ijkl
(c
ij
"
) Ac
kl
e
RHCHS
-n r4!le !nral7 le domaine lastique du mod4le de (u%eux est de dimension tr4s
@aible et les incrments de d@ormations sollicitent rapidement les al!orit"mes pr/
H Mt"ode d'int!ration applique au mod4le de (u%eux 9;
sents ci/dessous RYHC= SC
Un re/dcoupa!e de l'incrment de d@ormation Ac
kl
7 au nieau local7 est intro/
duit de @a0on A assurer une olution contrMle de l'tat de contrainte sur la prdic/
tion lastiqueC Ces crit4res portent sur les parties isotrope et diatoire du tenseur
de contrainte lastique prdit :
p
(
c
ij
(l+s
)
p
(
c
ij
#
)
p
(
c
ij
#
)
< !%
q
k
(
c
ij
(l+s
)
q
k
(
c
ij
#
)
q
k
( c
ij
#
)
< !%
RHC9S
Ce contrMle permet !alement d'iter des dier!ences pouant apparaQtre durant le
processus de rsolution locale ultrieur RYHC= SC
9-4 Int5r&ti!n *es 3&ti!ns c!nstitti;es #&st!"0#&sti3es
L'ensemble des tapes ncessaires pour raliser l'int!ration implicite du mod4le de
(u%eux est prsent sur l'illustration HC$C
L'al!orit"me mis en place rsulte d'une part des traaux prcdents en lien aec le
mod4le de (u%eux R+iccue33u7 $;;$S7 mais aussi d'un processus d'amliorations
successies issues du retour d'exprience accumul lors de la mise en place des
cas/tests de non r!ression du mod4le dans le lo!iciel CodeTAsterC
+our un incrment de d@ormations conduisant A un prdicteur lastique c
ij
(l+s
situ dans l'espace des contraintes et ariables internes7 en de"ors des di@@rentes
sur@aces de c"ar!esRYHC# et YHC=C# S7 il conient de d@inir le domaine potentiel des
mcanismes acti@s7
"
p)t
RYHC=C$ SC -nsuite7 il est ncessaire de rsoudre le
syst4me d'quations locales non linaires7 tabli sur la base des mcanismes
potentiellement acti@s7
"
p)t
C Apr4s coner!ence7 on ralue l'ensemble des
mcanismes rellement actis
"
+ct
7 et s'il y a des di@@rences aec
"
p)t
7 on
reprend la rsolution locale non linaire aec
"
+ct
C
F& HC= ,nt!ration des quations constituties lasto/plastiques
9-4-, D!m&ine 0!tentie# *es mc&nismes &cti2s
Les mcanismes lasto/plastiques "
k
K
7 pour k 1,4
#
et K=| m, c
=
7 sont
actis ou inactis selon le type de c"ar!ement suiiC Un domaine potentiel de
mcanismes acti@s7
"
p)t
7 est ainsi dtermin au dbut du pas courant A partir de
l'tat atteint prcdemmentC
Le c"oix initial des mcanismes potentiellement actis au dmarra!e du pas de
temps considr rsulte de l'tat mcanique coner! atteint A l'instant coner!
prcdentC Cet tat mcanique est caractris par l'tat d'actiation des di@@rents
mcanismes Rmonotones ou cycliquesS et les aleurs des ariables c
ij
#
et o
ij
#
C
o
ij
#
reprsente l'ensemble des ariables d'crouissa!e du mod4le7 propres A
# k 1,4 est l'indice qui permet de di@@rencier les mcanismesC +our k 1,3 7 l'in/
dice caractrise le mcanisme diatoire dont la normale au plan de pro%ection est porte
par e
k
C +our k=4 7 il s'a!it des mcanismes isotropesC
= K=| m, c est l'indice indiquant la di@@rence entre les mcanismes monotones m et
cycliques c C
Illustration *.1 : 4c-ma d'intgration implicite du mod$le de :u6eu9 dans +ode;/ster
H Mt"ode d'int!ration applique au mod4le de (u%eux F$
c"aque mcanisme7 que ce soient les de!rs de mobilisation
( r
k
K
)
#
7 la d@ormation
olumique plastique
(c
v
p
)
#
ou encore les ariables d'"istoire tensorielles
( 4
ij
H
)
#
et
(t
ij
H
)
#
caractrisant les sur@aces de c"ar!e des mcanismes cycliques7 d'oZ
o
ij
#
=(( r
k
K
)
#
, (c
v
p
)
#
,( 4
ij
H
)
#
, (t
ij
H
)
#
)
C
+our caractriser l'tat d'actiation des di@@rents mcanismes d'un tat coner!7 le
domaine des mcanismes plastiques rellement actis est introduit et nomm
"
+ct
RYHC=C9 SC
La prdiction lastique tablie en HC$ permet d'tablir une nouelle estimation de
"
p)t
A l'aide de l'olution de
f
k
K
7 pour k 1,4 et K=|m, c 7 et des
seuils des mcanismesC Tous les lments sont alors runis pour d@inir les
situations de c"ar!ement ou de dc"ar!ement pour c"aque mcanismeC
"
p)t
est initialis A la aleur de
( "
+ct
)
#
et les ariables d'"istoire des
mcanismes cycliques N p4res O sont enre!istresC +our tous les mcanismes
"
k
K
7 deux !randeurs sont calcules pour aider A la construction de
"
p)t
:
c
k
K
= f
k ,c
K
(c
ij
las
) A
ijmn
Ac
mn
g
k
K
= f
k
K
(c
ij
las
)
RHCFS
+our les mcanismes cycliques "
k
c
7 la quantit c
k
m
est !alement calcule pour
le mcanisme monotone "
k
m
associC -n cas d'c"ec du calcul pour l'aluation
de f
k ,c
K
(c
ij
las
)
7 on tablit la aleur de la drie de la @onction de c"ar!e A l'tat de
contraintes coner! prcdent7 c
ij
#
7 f
k ,c
K
(c
ij
#
)
C
Si c
k
m
0 et les sur@aces de c"ar!e de "
k
c
et "
k
m
sont N proc"es O7 alors
"
p)t
:="
p)t
"
k
m
"
k
c
et les aleurs des ariables d'crouissa!e sont
rinitialises A l'tat initial7 notamment r
k
c
=r
(l+
c
C Le crit4re de proximit entre les
sur@aces de c"ar!e monotone et cyclique est tabli en calculant la di@@rence entre
le @acteur de mobilisation atteint pour le seuil monotone r
k
m
et la aleur du @acteur
de mobilisation A l'tat coner! prcdent r
k
c
C
Tous les mcanismes possibles "
k
K
sont ensuite passs en reue en testant les
aleurs c
k
K
et g
k
K
C Les di@@rentes situations sont les suiantes :
"
k
m
"
p)t
C Alors7 si c
k
m
0 7 "
k
m
reste dans "
p)t
[ sinon7 les
ariables d'"istoire
( 4
ij
H
)
"
sont d@inies et si g
k
c
0 pour le mcanisme
"
k
c
associ A "
k
m
7 "
k
c
et "
k
m
ne sont plus des lments de
F# HC= ,nt!ration des quations constituties lasto/plastiques
l'ensemble
"
p)t
C -n reanc"e7 dans le cas oZ g
k
c
0 7 "
k
m
est retir
de
"
p)t
au pro@it de "
k
c
C
"
k
m
"
p)t
C Alors7 si c
k
m
0 et g
k
m
0 7 alors "
p)t
:="
p)t
"
k
m
7
mais si g
k
m
0 7 "
k
m
n'est pas a%out au domaine
"
p)t
C
"
k
c
"
p)t
C Alors7 si c
k
c
0 7 "
k
c
reste dans "
p)t
[ sinon7 les
ariables d'"istoire
( 4
ij
H
)
"
correspondantes A l'tat coner! prcdent
sont mmorisesC Si g
k
c
0 pour "
k
c
d@ini par
( 4
ij
H
)
"
7 "
k
c
est
maintenu dans
"
p)t
C 2ans le cas contraire7 si g
k
c
0 7 "
k
c
est retir
de
"
p)t
C
"
k
c
"
p)t
C Alors7 si c
k
c
0 et g
k
c
0 7 alors "
p)t
:="
p)t
"
k
c
C
L'entualit de micro/dc"ar!es pour les mcanismes diatoires doit
nanmoins Btre considreC On teste pour cette entualit le seuil du
mcanisme N p4re O de "
k
c
: si g
k
c
0 7 alors le mcanisme N @ils O n'a
plus lieu d'Btre considr et ce mcanisme N @ils O est remplac dans
"
p)t
par le mcanisme N p4re O7 en s'assurant d'attribuer aux ariables
d'"istoire
( 4
ij
H
)
"
les proprits de ce dit mcanisme N p4re OC
Si7 au terme de l'analyse prcdente7 aucun mcanisme ne subsiste dans
"
p)t
7
le r!ime est alors considr lastique7 c'est A dire le r!ime lastique apparaQt
lorsqu'aucun mcanisme n'est actiC
Rem&r3e $
2ans le cadre des mod4les de comportement A mcanismes multiples coupls7 les
conditions de c"ar!e<dc"ar!e des di@@rents mcanismes ne peuent pas Btre
tablies A partir des conditions de 5u"n/TucIer RY#C=CF SC +our un incrment de
d@ormation donn7 ces conditions ne sont pas su@@isantes pour dterminer les
mcanismes rellement acti@sC La liste suiante donne des exemples de situation
entuelle7 que l'al!orit"me local doit pouoir !rer :
Si seulement une sur@ace de c"ar!e est actie Rc'est A dire A\
k
K
>0 S7
alors la condition c
k
K
0 implique ncessairement A\
k
K
>0 7 c'est A dire
que le mcanisme "
k
K
est le seul mcanisme acti@ [
Si plusieurs sur@aces de c"ar!e sont acties7 alors c
k
K
0 n'implique pas
ncessairement que A\
k
K
>0 C -n e@@et7 on peut aoir
g
k
K
(
c
ij
#
+Ac
ij
(l+s
)
0 mais g
k
K
(
c
ij
"
)
0 C +our une illustration !omtrique
de cet exemple7 se r@rer aux traaux de Simo et alC R$;88SC
2e mBme7 si plusieurs sur@aces de c"ar!e sont acties7 alors la condition
H Mt"ode d'int!ration applique au mod4le de (u%eux F=
A\
k
K
>0 ne ncessite pas la condition c
k
K
0 RSimo et alC R$;88S
donnent un exemple !omtrique de cette entualitSC
L'ensemble des procdures mises en place pour dterminer au mieux
"
p)t
est
prsent sur l'illustration HC# :
9-4-/ Pr*icti!n #&sti3e
Une prdiction lastique est ncessaire pour initialiser le processus de rsolution ia
la mt"ode de *eUton et obtenir une solution d'essai explicite en calculant un
candidat
(
A\
k
K
)
0
C
+our respecter les domaines de d@inition des dierses dries dans les quations
prsentes ci/dessous7 on impose A tous les p
k
(l+s
d'Btre strictement n!ati@sC On
modi@ie donc le prdicteur lastique c
ij
(l+s
initial pour d@inir c
ij
(l+s
de la @a0on
suiante :
c
ij
(l+s
=c
ij
#
+A
ijkl
( c
ij
(l+s
) jAc
kl
RHC:S
Illustration *.2 : Dfinition du domaine potentiel des mcanismes actifs
"
p)t
du mod$le de
:u6eu9
FH HC= ,nt!ration des quations constituties lasto/plastiques
j est calcul a@in d'assurer p
k
(l+s
<10
6
#
ref
C
%
(
=
( c
ij
(l+s
,
(
c
v
p
)
#
,
(
r
k
K
)
#
, 0
)
correspond au prdicteur initial ncessaire A la rsolution du syst4me non linaire
localC Cette restriction permet d'assurer de respecter les domaines de d@inition des
termes de la matrice %acobienneC
A"adi et 5renI R#&&=S ont !alement recours A une tape de conditionnement pour
proscrire les tats de traction issus du prdicteur lastiqueC ,ls traaillent dans le
plan des contraintes principalesC Les tats modi@is sont soumis A une translation le
lon! de l'axe "ydrostatique et une diminution de leurs aleurs sur leurs
composantes diatoiresC
La solution d'essai explicite
(
A\
k
K
)
0
est obtenue A partir du domaine
"
p)t
7 en
rsolant les quations linarises autour de l'tat sans olution plastique c
ij
(l+s
:
(
f
k
K
(A\
l
L
)
)
%
(
(A\
l
L
)
0
=f
k
K
( c
ij
(l+s
, (c
v
p
)
#
,( r
k
K
)
#
) RHC8S
aec
(
f
k
K
(A\
l
L
)
)
%
(
=
(
f
k
K
c
ij
)
%
(
A
ijrs
( c
ij
las
) ( 1
l
L
)
rs
#
+
(
f
k
K
c
v
p
)
%
(
( 1
l
L
)
rs
#
/
rs
+
(
f
k
K
r
l
L
)
%
(
( l
l
L
)
#
6
kl
RHC;S
L'criture du mod4le de (u%eux ori!inal ne peut pas admettre plus de quatre
mcanismes plastiques acti@s simultanmentC
A partir de l'quation HC87 l'expression des incrments des multiplicateurs plastiques
peut Btre obtenue comme suit :
(A\
l
L
)
0
=
f
k
K
( c
ij
(l+s
, ( c
v
p
)
#
,( r
k
K
)
#
)
(
f
k
K
(
A\
l
L
)
)
%
(
RHC$&S
Le calcul des olutions des inconnues locales s'e@@ectue ensuite comme suit :
(
Ac
ij
)
0
= c
ij
#
+A
ijrs
( c
ij
(l+s
)
(
Ac
rs
k
(
A\
k
K
)
0
(
1
k
K
)
rs
#
)
(
Ac
v
p
)
0
=
k
(
A\
k
K
)
0
(
1
k
K
)
mn
#
/
mn
, K| m, c
(Ar
k
K
)
0
= (A\
k
K
)
0
( l
k
K
)
#
RHC$$S
On impose de plus que :
(
A\
k
K
)
0
0 7
Les @acteurs de mobilisation sont borns sur la solution d'essai :
H Mt"ode d'int!ration applique au mod4le de (u%eux F9
(( r
k
m
)
#
+(Ar
k
m
)
0
)<1 7
( ( r
k
c
)
#
+( Ar
k
c
)
0
)<( r
k
m
)
#
7
de @a0on A assurer la raisemblance des olutions des ariables internesC
Le ecteur solution estim apr4s la prdiction d'-uler s'exprime @inalement comme
suit :
$
0
=
$
e
+A$
0
RHC$#S
,l est compos des inconnues suiantes du probl4me non linaire local :
$
0
=
((
c
ij
)
0,
( c
v
p
)
0
,( r
k
K
)
0
, (A\
k
K
)
0
)
RHC$=S
aec
(
c
ij
)
0
= c
ij
#
+
(
Ac
ij
)
0
(c
v
p
)
0
= (c
v
p
)
#
+( Ac
v
p
)
0
( r
k
K
)
0
= ( r
k
K
)
#
+( Ar
k
K
)
0
RHC$HS
Le nombre total d'inconnues du ecteur solution
$
0
peut Btre au maximum de
quin3e : six pour les composantes du tenseur de contrainte7 une pour la d@ormation
olumique plastique7 les di@@rents de!rs de mobilisation associs aux mcanismes
acti@s Rlimits A quatreS et @inalement les multiplicateurs plastiques associs aux
mcanismes acti@s R!alement limits A quatreSC
9-4-4 P7&se *e c!rrecti!n $ 3&ti!ns n!n #in&ires = rs!*re
4.3.3.1 )trations de correction de *e+ton
Les itrations de correction de *eUton consistent A rsoudre les quations
suiantes simultanment7 pour
Ac
kl
donn :
Loi d'tat incrmentale d'lasticit non linaire7 note ( LE)
ij
:
c
ij
"
c
ij
#
A
ijkl
( c
ij
"
) (Ac
kl
Ac
kl
p
)=0 RHC$9S
Jolution incrmentale de la ariable de coupla!e c
v
p
7 ( LEVP) :
(c
v
p
)
"
(c
v
p
)
#
k 1,4
A\
k
K
(1
k
K
)
ij
/
ij
=0 , K| m, c
RHC$FS
Jolution incrmentale des @acteurs de mobilisation r
k
K
7 (
LR
k
K
) :
( r
k
K
)
"
(r
k
K
)
#
A\
k
K
l
k
K
=0
RHC$:S
FF HC= ,nt!ration des quations constituties lasto/plastiques
Jquations des sur@aces de c"ar!e f
k
K
7 (
LF
k
K
) :
f
k
K
=0 RHC$8S
L'int!ration locale du mod4le consiste A rsoudre le syst4me carr %( A%) =0 7
aec A%=
(
Ac
ij
, Ac
v
p
,Ar
k
K
, A( A\
k
K
) )
et %=
(
LE
ij
, LEVP , LR
k
K
, LF
k
K
)
C
On rsout de mani4re implicite le syst4me %( A%) =0 par une mt"ode de
*eUton7 pour k 1,4 et K=| m, c C
A l'itration j de la boucle de correction locale de *eUton7 on rsout l'quation
matricielle :
(
%
A%
)
A%
j
6A%
j+1
=%
(
A%
j
) RHC$;S
oZ la matrice tan!ente
(
%
A%
)
A%
j
7 non symtrique7 est calcule de la mani4re
prsente en annexe ;C# RpC$;:S :
(
%
( A%)
)
A%
=
|
LE
ij
c
rs
LE
ij
c
v
p
E
ref
LE
ij
r
k
K
#
ref
LE
ij
(
A\
k
K
)
E
ref
LEVP E
ref
c
rs
LEVP
c
v
p
LEVP E
ref
r
k
K
#
ref
LEVP
(
A\
k
K
)
LR
k
K
#
ref
c
rs
LR
k
K
#
ref
c
v
p
E
ref
LR
k
K
r
k
K
LR
k
K
#
ref
(
A\
k
K
)
E
ref
LF
k
K
c
rs
LF
k
K
c
v
p
E
ref
LF
k
K
r
k
K
#
ref
0
RHC#&S
Le syst4me est conditionn dans le but d'assurer A c"aque ariable du syst4me la
dimension des multiplicateurs plastiques A\
k
K
et A c"aque quation celle de
l'quation HC$F ( LEVP) C Ce c"oix permet d'aoir des quations du mBme ordre
de !randeur7 donc d'assurer une coner!ence plus N uni@orme O sur l'ensemble du
syst4meC
Rem&r3e $
Le dterminant de la matrice tan!ente
(
%
A%
)
A%
j
est a priori positi@ en
p"ase d'crouissa!e positi@C Cependant7 il pourrait deenir n!ati@C Aucun
H Mt"ode d'int!ration applique au mod4le de (u%eux F:
traitement particulier n'a pour l'instant t initi pour obserer ce
p"nom4neC
,l est A noter que dans cette p"ase de corrections plastiques7 les aleurs
n!aties des multiplicateurs plastiques sont acceptesC Ces corrections
n'ont aucune relation aec la notion de c"ar!e a dc"ar!e des seuils
lastoplastiquesC
4.3.3.2 ,-ase de mise " $our
Apr4s rsolution7 on met A %our le ecteur solution :
A%
j +1
= A%
j
+6A%
j +1
%
j +1
=
%
e
+A%
j +1
RHC#$S
Le candidat %
j+1
est alors test par rapport au crit4re de coner!ence local
RYHC=C=CH SC
4.3.3.3 .estion des c-ecs d/int0ration locale
Les actions menes7 dcrites ci/dessous7 interiennent en cas d'c"ec de l'al!o/
rit"me de *eUton local RYHC=C= SC Toute modi@ication apporte A
"
p)t
conduit n/
cessairement A reprendre l'int!ration locale aec le noueau domaine
"
p)t
C Ce
processus de mise A %our de
"
p)t
est toute@ois limit A cinq tentaties7 @aute de
quoi le mod4le de comportement renoie un indicateur d'c"ec au nieau !lobalC
Les premiers cas traits s'intressent apr4s c"aque itration de l'al!orit"me
de *eUton au risque de c"eauc"ement de deux sur@aces de c"ar!e dia/
toires cyclique et monotone ou cyclique et cyclique dans l'espace des
contraintes et ariables internesC Ces p"nom4nes sont dtects ia des
tests de proximit entre la position de l'tat actuel A la
j
6me
itration Rtat
d@ini par son tat de contraintes et aleurs des ariables internesS et la sur/
@ace de c"ar!e mise en cause en cas de c"eauc"ementC
+our le cas particulier des deux sur@aces de c"ar!e diatoires cyclique
et monotone7 si la proximit est tablie7 le mcanisme monotone "
k
m
est a%out directement au domaine
"
p)t
tout en retirant le mcanisme
cyclique tan!ent "
k
c
C
+our les cas de proximit de deux sur@aces de c"ar!e diatoires cy/
cliques N p4re O et N @ils O7 le crit4re de proximit porte sur la position de
l'tat actuel par rapport A la position de l'tat mmoire caractrisant le
point de cration de la sur@ace de c"ar!e N @ils OC Cet tat mmoire est
un point de tan!ence entre les sur@aces de c"ar!e N p4re O et N @ils OC Si
la proximit est tablie7 le mcanisme N @ils O est retir de
"
p)t
pour
ensuite y a%outer le mcanisme N p4re OC
F8 HC= ,nt!ration des quations constituties lasto/plastiques
2'autres c"ecs peuent se produire durant l'al!orit"me de *eUton local7
notamment l'apparition d'tats de contrainte de tractionC
Si un tat de traction est dtect apr4s c"ec local7 pour tout multiplica/
teur plastique7 associ A un mcanisme diatoire7 n!ati@ apr4s le tir ex/
plicite d'-ulerRYHC=C# S7
(
A\
k
K
)
0
7 le mcanisme diatoire est retir de
"
p)t
C
Si tous les multiplicateurs plastiques sont positi@s apr4s le tir explicite
d'-uler7 c'est A dire
(
A\
k
K
)
0
0 7 alors une solution "euristique consiste
A retirer l'ensemble des mcanismes diatoires prsents dans
"
p)t
7
pour obtenir un noueau prdicteur apr4s actualisation de
"
+ct
RYHC=C9
SC
+our les cas di@@rents de ceux prsents ci/dessus7 une autre approc"e
"euristique a t mise en place pour !rer ce probl4me d'c"ec d'int!ration
localeC On re!arde la aleur maximale de
%
(
A%
j
) C Si cette aleur maxi/
male est porte par une loi d'olution d'un mcanisme diatoire cyclique
"
k
c
7 alors le mcanisme en question est retir de
"
p)t
C
La derni4re tentatie "euristique s'attac"e A contrMler la prsence de mca/
nismes diatoires cycliques ier!esC Si c'est le cas7 ces mcanismes sont
retirs de
"
p)t
C
Si aucun des traitements spci@iques dcrits ci/dessus n'a t sollicit7 la non/
coner!ence locale du mod4le est suppose et cette in@ormation est renoye A l'al/
!orit"me d'int!ration !lobale de l'quilibre non linaireC
4.3.3.4 Critre de con1er0ence local
La coner!ence est rpute acquise d4s lors que :
%
(
A%
j+1
)
=
.
i
(
%
(
A%
j+1
) )
2
<j
RHC##S
La norme sur le rsidu utilise aussi la mise A l'c"elle des diers termes inter/
enantsC 24s lors que la coner!ence est acquise7 le candidat %
j+1
deiendra
l'tat coner!
%
"
A condition de respecter les crit4res d'olution RYHC=CH S et
apr4s s'Btre assur que le domaine des mcanismes rellement acti@s
"
+ct
RYHC=C9 S correspond au domaine des mcanismes potentiellement acti@s
"
p)t
C Le
param4tre j est donn par l'utilisateurC Sa aleur par d@aut est @ixe A
j=10
6
C
H Mt"ode d'int!ration applique au mod4le de (u%eux F;
9-4-9 C!ntrG#e *e #8;!#ti!n
4.3.4.1 Multiplicateurs plastiques
Apr4s coner!ence de l'al!orit"me local de *eUton7 il @aut s'assurer de la positiit
des multiplicateurs plastiques
( A\
k
K
)
"
C +our des aleurs n!aties de
( A\
k
K
)
"
7
aant l'option conduisant A stipuler le dc"ar!ement du mcanisme "
k
K
7 un ratio
RqC HC#=S est calcul entre la aleur du multiplicateur plastique et la aleur
maximale des multiplicateurs plastiques supposs acti@sC Si ce ratio a une aleur
in@rieure en aleur absolue A une tolrance @ixe par l'utilisateur7 o Rproc"e de
10
6
S7 le mcanisme "
k
K
est considr Btre en c"ar!ement N neutre O et on
impose
( A\
k
K
)
"
=0
pour le mcanisme "
k
K
C
A\
k
K
"+,
k =1,4
(
A\
k
K
, o
)
<o
RHC#=S
4.3.4.2 2aria3les internes
Les aleurs pour l'tat coner! obtenu pour les @acteurs de mobilisation doient /
ri@ier un interalle de aleurs co"rent aec le mod4le :
( r
k
m
)
"
< 1
( r
k
c
)
"
< ( r
k
m
)
"
RHC#HS
Une r4!le pour l'olution des @acteurs de mobilisation et la d@ormation olumique
plastique a !alement t mise en place pour !arantir la prcision des rsultats ob/
tenus :
( r
k
K
)
"
(r
k
K
)
#
( r
k
K
)
#
< 10%
(c
v
p
)
"
(c
v
p
)
#
"+,
((
c
v
p
)
#
,o
)
< 10%
RHC#9S
Le param4tre o est le mBme que celui introduit dans l'expression HC#=C +our des
incrments de d@ormation !nrant des olutions suprieures A cette r4!le7 un
processus de re/dcoupa!e local est appliqu pour !arantir la prcision des rsul/
tatsC
9-4-: C!ntrG#e *es mc&nismes &cti2s
On dcrit dans ce para!rap"e la !estion de l'actiation e@@ectie des mcanismes
plastiquesC
:& HC= ,nt!ration des quations constituties lasto/plastiques
Simo et alC R$;88S proposent deux approc"es di@@rentes pour dterminer les
mcanismes rellement acti@sC La premi4re mt"ode consiste A rsoudre le syst4me
local A partir de
"
p)t
%usqu'A coner!ence7 puis de ri@ier la positiit des
multiplicateurs plastiques de tous les mcanismes de
"
p)t
C +our toutes les
itrations de correction plastique de cette approc"e7 le domaine
"
p)t
reste @ixC
La deuxi4me approc"e permet7 quant A elle7 de modi@ier
"
p)t
au cours des
itrations de correction de *eUtonC Le si!ne des multiplicateurs plastiques est
ri@i A c"aque itrationC A une itration donne7 si le multiplicateur plastique relati@
A un mcanisme est n!ati@7 alors ce mcanisme est retir de
"
p)t
et la
procdure de rsolution est rinitialiseC
A l'inerse du c"oix de Simo et alC R$;88S7 l'al!orit"me c"oisi ici pour contrMler les
mcanismes acti@s pour l'int!ration de (u%eux a t la premi4re solution proposeC
,l paraQt plus @acile A implanter et n'impose aucune condition supplmentaire sur les
aleurs obtenues par les itrs successi@sC -n reanc"e7 il est sXr que la seconde
approc"e !arantit d'obtenir une coner!ence monotone du syst4meC
Apr4s coner!ence du syst4me d'quations locales non linaire7 on ri@ie
l'ensemble des mcanismes rellement acti@s
"
+ct
selon la procdure suiante7
en partant de la prdiction de
"
p)t
Rc@ illustration HCF pa!e :9SC
L'arbre de dcision mis en place est un lment constituti@ du mod4le de (u%eux7
puisqu'il dcrit l'enc"aQnement des mcanismes cycliques et les enre!istrements
des ariables N mmoires O discr4tes et les entuelles restaurations des ariables
d'crouissa!eC La mt"odolo!ie mise en place pour construire le domaine
"
+ct
est relie directement au sc"ma d'int!ration implicite du mod4leC Cet arbre de
dcision ne peut pas Btre translat directement A un sc"ma d'int!ration explicite
puisqu'il est construit en supposant un tat de contraintes admissible7 c'est A dire
\( k , K) , f
k
K
( c
k
, r
k
K
,c
v
p
)<0 C
La liste d'actions suiante prsente l'al!orit"me mis en place7 qui passe en reue
tous les mcanismesC Toute modi@ication de
"
+ct
conduira A reprendre une
nouelle rsolution locale non linaire RYHC= S :
,- C&s *8n mc&nisme *;i&t!ire m!n!t!ne &cti2 "
k
m
&;ec A\
k
m
0 $
$C$C Si r
k
m
=r
(l+
7 alors ce mcanisme "
k
m
est dsacti :
"
+ct
:="
+ct
\
"
k
m
[
$C#C Sinon Rremise en cause de l'estimation @aite dans
"
p)t
SRillustration
HC=S :
$C#C$C S'il existait un mcanisme cyclique pralablement A l'tape de
cration de
"
p)t
7 le mcanisme cyclique "
k
c
est restaur mais
dclar inacti@ Rnon pris en compte dans
"
+ct
S7 tandis que le
mcanisme monotone "
k
m
est retir : "
+ct
:="
+ct
\
"
k
m
[
$C#C#C S'il n'existait pas de mcanisme cyclique7 on cre un mcanisme
H Mt"ode d'int!ration applique au mod4le de (u%eux :$
cyclique "
k
c
A partir de l'tat coner! prcdent et on enl4e
"
k
m
de
"
+ct
: "
+ct
:="
+ct
\
"
k
m
[
/- C&s *8n mc&nisme is!tr!0e m!n!t!ne "
4
m
&cti2 &;ec A\
4
m
0 $
#C$C Si r
4
m
=r
(l+
s
7 alors "
4
m
est retir de
"
+ct
: "
+ct
:="
+ct
\
"
4
m
[
#C#C Sinon :
#C#C$C S'il existait un mcanisme cyclique "
4
c
pralablement A l'tape
de
"
p)t
7 le mcanisme cyclique "
4
c
est restaur mais dclar
inacti@ Rnon pris en compte dans
"
+ct
S7 tandis que le mcanisme
monotone "
4
m
est retir : "
+ct
:="
+ct
\
"
4
m
[
#C#C#C S'il n'existait pas de mcanisme cyclique7 un mcanisme cyclique
est cr A condition que
p
"
p
#
#
c
0 Ron rappelle que #
c
dpend
de c
v
p
7 ariable de coupla!e de l'ensemble des mcanismesSC
2ans ce cas7 le mcanisme "
4
m
est retir de
"
+ct
C
4- C&s *8n mc&nisme *;i&t!ire m!n!t!ne "
k
m
in&cti2 $ Si le seuil
f
k
m
(c
"
, o
"
)0 7 alors ce mcanisme deient acti@ : "
+ct
:="
+ct
"
k
m
7
et les ariables internes associes au mcanisme cyclique acti@ "
k
c
prennent des aleurs initiales ier!esC
9- C&s *8n mc&nisme is!tr!0e m!n!t!ne "
4
m
cr m&is in&cti2 $ Si le
seuil f
4
m
(c
"
, o
"
)0 7 alors ce mcanisme deient acti@ :
"
+ct
:="
+ct
"
4
m
[ si le seuil f
4
m
(c
"
, o
"
)0 7 alors7 si
p
"
p
#
#
c
0 7
on d@init un mcanisme cyclique "
4
c
et on retire "
4
m
C
Illustration *.' : <estion des mcanismes pour la constitution du domaine des mcanismes
plasti)ues acti5s
"
+ct
: cas 1.2.1 ; cas 1.2.2
:# HC= ,nt!ration des quations constituties lasto/plastiques
:- C&s *8n mc&nisme c(c#i3e "
k
c
cr &0&r&;&nt *&ns
"
p)t
site
& *c7&r5ement *8n mc&nisme m!n!t!ne "
k
m
:
9C$C Si A\
k
c
0 7 le mcanisme "
k
c
est retir de
"
+ct
:
"
+ct
:="
+ct
\
"
k
c
[
9C#C Si le seuil du mcanisme "
k
m
est positi@7 f
k
m
(c
"
, o
"
)0 alors :
9C#C$C +our un mcanisme diatoire7 on actie "
k
m
:
"
+ct
:="
+ct
\
"
k
c
"
k
m
et le mcanisme cyclique reprend des
aleurs initiales ier!es pour ses ariables internesC
9C#C#C +our un mcanisme isotrope : si le mcanisme cyclique "
4
c
a
t modi@i suite A l'tape de cration de
"
p)t
7 le mcanisme
cyclique d@ini aant
"
p)t
est restaur [ sinon7 le mcanisme
monotone "
4
m
est acti : "
+ct
:="
+ct
\
"
4
c
"
4
m
et le
mcanisme cyclique reprend des aleurs initiales ier!es pour ses
ariables internesC
9C=C S'il s'a!it d'un mcanisme diatoire cyclique "
k
c
dclar acti@ dans
"
p)t
7 on contrMle le non/c"eauc"ement de la sur@ace de c"ar!e
cyclique aec la sur@ace de c"ar!e monotoneC On calcule la position
absolue norme du centre de la sur@ace de c"ar!e cyclique
7
k
c
=4
k
H
+t
k
H
r
c
k
A laquelle on a%oute le rayon du cercle de la sur@ace
de c"ar!e cyclique r
k
c
C Cette aleur est teste par rapport au rayon de
la sur@ace monotone r
k
m
C Si
(( 7
k
c
+r
k
c
) r
k
m
)
r
k
m
0
7 il y a c"eauc"ement
des sur@acesC ,l est ncessaire de modi@ier la sur@ace de c"ar!e cyclique
en restaurant la sur@ace de c"ar!e cyclique N p4re O de la sur@ace
actuellement actieC
9CHC S'il s'a!it d'un mcanisme cyclique "
k
c
dclar inacti@ dans
"
p)t
7
Illustration *.* : +as 1.' = 2estauration de la surface de c-arge du mcanisme d5iatoire
c>cli)ue ? p$re @ pour empAc-er le c-e5auc-ement des surfaces de c-arge
H Mt"ode d'int!ration applique au mod4le de (u%eux :=
alors :
9CHC$C +our un mcanisme diatoire cyclique "
k
c
:
9CHC$C$C Si le seuil f
k
c
(c
"
, o
"
)0 alors "
k
c
est dclar acti@ et :
$C Si ce mcanisme cyclique est N @ils O d'un autre mcanisme
cyclique7 alors si le seuil du mcanisme N p4re O
f
( k , p6re)
c
(c
"
, o
"
)0 est !alement iol7 c'est le mcanisme
N p4re O qui est a%out A
"
+ct
[
9CHC$C#C Si la procdure de construction de
"
p)t
a modi@i une
sur@ace de c"ar!e cyclique d%A existante et si7 apr4s int!ration
locale7 la condition
t
k
H
(
4
k
H
1
k
c
p
k
F( p
k
, c
v
p
)
)
0
est respecte7
alors la modi@ication aance pour la construction de
"
p)t
n'aait pas lieu d'BtreC Le mcanisme cyclique N p4re O doit Btre
restaurC Si de plus7 f
( k , p6re)
c
(c
"
, o
"
)0 7 le mcanisme est
a%out A
"
+ct
C
9CHC$C=C Si la condition
t
k
H
(
4
k
H
1
k
c
p
k
F( p
k
, c
v
p
)
)
0
est ri@ie pour
un mcanisme cyclique dont le mcanisme N p4re O est le
mcanisme monotone7 le mcanisme monotone "
k
m
doit Btre
acti [
9CHC$CHC Si le mcanisme cyclique "
k
c
inacti@ tait d%A croui A
l'tat coner! (c
#
, o
#
) 7 alors un mcanisme cyclique N @ils O
doit Btre cr A l'tat inacti@ pour l'tat coner! (c
"
, o
"
) C
9CHC#C +our un mcanisme isotrope cyclique "
4
c
:
Illustration *.1 : +as 1.*.1.2 : 2estauration du mcanisme c>cli)ue p$re
:H HC= ,nt!ration des quations constituties lasto/plastiques
9CHC#C$C Si
(
( p)
( #
c
)
)
"
<
(
( p)
( #
c
)
)
#
et si le mcanisme cyclique
s'crouit pour des c"ar!ements d'extension : si f
4
c
(c
"
, o
"
)0 7
alors "
4
c
est dclar acti@C Sinon7 le mcanisme "
4
c
reprend
les aleurs des ariables N mmoires O tablies aant la cration
du
"
p)t
C Si "
4
c
n'tait pas d@ini A l'tat (c
#
, o
#
) 7 alors le
mcanisme isotrope monotone "
4
m
est !alement dsactiC
9CHC#C#C Si
(
( p)
( #
c
)
)
"
(
( p)
( #
c
)
)
#
et si le mcanisme s'crouit pour
des c"ar!ements de compression : si f
4
c
(c
"
, o
"
)0 7 alors
"
4
c
est dclar acti@C Sinon7 les ariables mmoratrices
reprennent les aleurs antrieures tablies A l'tat (c
#
, o
#
) C
9CHC#C=C Si
(
( p)
( #
c
)
)
"
(
( p)
( #
c
)
)
#
et si le mcanisme s'crouit pour
des c"ar!ements d'extension :
$C Si la cration du mcanisme est interenue lors de la cration
de
"
p)t
7 le mcanisme cyclique reprend les aleurs
tablies prcdemment pour l'tat (c
#
, o
#
) C Si
f
4
c
(c
"
, o
#
)0 7 alors le mcanisme "
4
c
est dclar acti@7
A condition que le mcanisme cyclique existe A cet tatC
Sinon7 le mcanisme monotone "
4
m
est dclar inacti@
!alementC
#C S'il n'y a pas eu de cration d'un noueau mcanisme
cyclique isotrope dans
"
p)t
7 alors on modi@ie les ariables
N mmoires O de "
4
c
temporairement A partir de (c
#
, o
#
)
C 2e plus7 si f
4
c
(c
"
, o
t
)0 7 alors "
4
c
est dclar acti@
aec les ariables N mmoires O temporairement admisesC
9CHC#CHC Si
(
( p)
( #
c
)
)
"
<
(
( p)
( #
c
)
)
#
et si le mcanisme s'crouit pour
des c"ar!ements de compression :
$C Si la cration du mcanisme est interenue lors de la cration
de
"
p)t
7 le mcanisme cyclique reprend les aleurs
tablies prcdemment pour l'tat (c
#
, o
#
) C Si
f
4
c
(c
"
, o
#
)0 7 alors le mcanisme "
4
c
est dclar acti@C
#C S'il n'y a pas eu de cration d'un noueau mcanisme
cyclique isotrope dans
"
p)t
7 alors on modi@ie les ariables
N mmoires O de "
4
c
temporairement A partir de
(c
#
, o
#
) et si f
4
c
(c
"
, o
t
)0 7 alors "
4
c
est dclar acti@
aec les ariables N mmoires O temporairement admisesC
H Mt"ode d'int!ration applique au mod4le de (u%eux :9
Rem&r3e $
2ans le cas oZ
"
+ct
"
p)t
7 on redmarre l'al!orit"me de *eUton local en
utilisant non plus le prdicteur lastique des contraintes c
ij
(l+s
RqCHC:S7 mais le
rsultat obtenu A la @in de l'tape c"oue prcdente7
(
c
(ch)'(
"
)
ij
7 associ aux
aleurs des ariables internes
o
#
C Cette procdure permet de dmarrer le
processus de rsolution de *eUton local aec un candidat en contraintes que l'on
esp4re plus proc"e de la solution @inale que le prdicteur lastiqueC
9-9 Tenser #&st!"0#&sti3e c!ntin
Le tenseur lasto/plastique permet de relier directement la ariation de contrainte
totale A la d@ormation totale7 le tout exprim sous @orme incrmentale :
c
ij
=H
ijrs
ep
c
rs
=A
ijrs
(c
ij
"
) ( c
rs
c
rs
p
)
RHC#FS
Son expression est tablie A partir des conditions de co"rence pour les mca/
nismes acti@s7 monotone ou cyclique L=| m , c C Les quantits interenant dans
ces expressions sont calcules pour l'tat coner!
(c
"
, o
"
)
C
La condition de co"rence pour un mcanisme l s'exprime comme suit :
Illustration *.B : 4c-ma global de dfinition du domaine des mcanismes plasti)ues acti5s
"
+ct
du mod$le de :u6eu9
:F HCH Tenseur lasto/plastique continu
f
l
L
=
f
l
L
c
ij
c
ij
+
f
l
L
c
v
p
c
v
p
+
f
l
L
r
l
L
r
l
L
=0 RHC#:S
aec
f
l
L
c
ij
c
ij
=
f
l
L
c
ij
A
ijrs
( c
ij
"
)
(
c
rs
k
\
k
K
( 1
k
K
)
rs
)
f
l
L
c
v
p
c
v
p
=
f
l
L
c
v
p
k
\
k
K
(1
k
K
)
rs
/
rs
=
f
l
L
c
v
p
k
\
k
K
(1
k
K
)
v
f
l
L
r
l
L
r
l
L
=
f
l
L
r
l
L
\
l
L
l
l
L
, K| m, c L| m, c
RHC#8S
L'criture explicite de la condition de co"rence pour le mcanisme l deient :
k
\
k
K
(
f
l
L
c
ij
A
ijrs
(
c
ij
"
) (
1
k
K
)
rs
+
f
l
L
c
v
p
(
1
k
K
)
v
)
+
\
l
L
f
l
L
r
l
L
l
l
L
=
f
l
L
c
ij
A
ijrs
(
c
ij
"
) c
rs
K| m, c , L| m, c
RHC#;S
On d@init un ecteur !lobal pour les multiplicateurs plastiques des di@@rents mca/
nismes acti@s Rprsents ici aec les quatre mcanismes acti@s simultanmentS :
A
k
K
=|
\
1
K
,
\
2
K
,
\
3
K
,
\
4
K
RHC=&S
+our la suite7 trois autres matrices sont utilises pour permettre une criture plus
concise de la matrice lasto/plastique du mod4le :
B
lk
LK
=
f
l
L
c
ij
A
ijrs
(c
ij
"
) (1
k
K
)
rs
+
f
l
L
c
v
p
(1
k
K
)
v
+
f
l
L
r
l
L
l
l
L
6
lk
( D
l
L
)
rs
=
f
l
L
c
ij
A
ijrs
( c
ij
"
)
(E
k
K
)
rs
= | (1
1
K
)
rs
,( 1
2
K
)
rs
, (1
3
K
)
rs
, (1
4
K
)
rs
RHC=$S
Les dimensions maximales des matrices prsentes ci/dessus sont ^HxH_ pour
B
lk
LK
7 ^HxF_ pour
( D
l
L
)
rs
7 ^FxH_ pour
( E
k
K
)
rs
C
L'inersion du syst4me tabli A partir de la relation HC#; permet d'obtenir l'expres/
sion du ecteur des multiplicateurs plastiques :
A
k
K
=( B
lk
LK
)
1
( D
l
L
)
rs
c
rs
RHC=#S
Les manipulations al!briques qui suient sont ncessaires pour obtenir l'expres/
sion de H
ijrs
ep
:
H Mt"ode d'int!ration applique au mod4le de (u%eux ::
c
ij
= A
ijrs
(c
ij
"
) ( c
rs
c
rs
p
)
= A
ijrs
(c
ij
"
) c
rs
A
ijrs
( c
ij
"
) (E
k
K
)
rs
A
k
K
= A
ijrs
(c
ij
"
) c
rs
A
ijrs
( c
ij
"
) (E
k
K
)
rs
( B
lk
LK
)
1
( D
l
L
)
mn
c
mn
RHC==S
L'expression @inale de la matrice lasto/plastique H
ijrs
ep
est donc la suiante :
H
ijrs
ep
=A
ijrs
(c
ij
"
) (
/
ijrs
(E
k
K
)
rs
B
lk
LK
( D
l
L
)
ij
)
RHC=HS
Rem&r3e $
Selon Simo et Taylor R$;89S7 le tenseur lasto/plastique continu ne permet pas d'as/
surer une coner!ence quadratique7 caractristique des mt"odes de *eUtonC Ce
probl4me est li au @ait que les incrments de contrainte et de d@ormation sont de
dimension @inie et non in@initsimaleC
+our prserer cette caractristique7 il @aut d@inir l'oprateur tan!ent consistant
aec le sc"ma d'int!rationC Cette remarque permet d'enisa!er une amlioration
@uture des deloppements actuels du mod4le de (u%eux dans CodeTAster7 si un tel
besoin s'a4rait ncessaireC
9-: Pers0ecti;es *8;!#ti!n
+our contribuer A la robustesse et la @iabilit des rsultats obtenus suite A
l'int!ration du mod4le de (u%eux7 d'autres mt"odes de complment aux
al!orit"mes implicites existent dans la littratureC
Armero et +re3/Fo!uet R#&&#S et ?eremic R#&&$S ont notamment montr le besoin
pour les al!orit"mes implicites type C++M d'int!rer une mt"ode de 'ec"erc"e
Linaire localeC Cette oie d'olution est actuellement mise en place dans
CodeTAster pour d'autres mod4les de comportementC Une application sur le mod4le
de (u%eux est enisa!eable et pourrait entuellement permettre de !a!ner en
stabilit7 en robustesse et en temps de calculC
:8 HC9 +erspecties d'olution
9 1alidation numrique de l'implantation du mod4le de (u%eux :;
: >&#i*&ti!n nmri3e *e #8im0#&nt&ti!n * m!*+#e
*e H1e.
9 1alidation numrique de l'implantation du mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:;
9C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC:;
9C# Modlisation d'une colonne $2 de sol bi/p"asique saturCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8$
9C#C$ Construction par couc"esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8$
9C#C$C$ GomtrieCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8$
9C#C$C# +roprits des matriauxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8#
9C#C$C= Conditions aux limites et c"ar!ementCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8=
9C#C$CH 2roulement du calculCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8H
9C#C$C9 +ost/traitement des rsultatsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8H
9C#C# Analyse sismique CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8F
9C#C#C$ Conditions aux limites et c"ar!ementCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC8:
9C#C#C# 'sultats de l'tudeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC88
9C#C= Conclusion sur l'tude de la colonne de solCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;$
9C= Conclusion sur l'implantation du mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;=
:-, Intr!*cti!n
Le processus de alidation de l'implantation numrique du mod4le de (u%eux a t
men en comparant les rsultats @ournis par CodeTAster et le lo!iciel LaUyer7
delopp A l'Jcole Centrale +arisC
Le lo!iciel LaUyer ralise l'int!ration numrique sur un point matriel du mod4le de
(u%eux dans sa ersion 1& RY=C$ S pour des c"ar!ements quelconques et pour des
conditions draines ou non drainesC Le c"ar!ement considr A ce point matriel
est appliqu directement en contraintes7 d@ormations ou sollicitations mixtesC Le
mod4le est int!r selon un sc"ma explicite aec redcoupa!e local7 al!orit"me
c"oisi A la suite des traaux de t"4se de +iccue33u R$;;$SC
La procdure de alidation a t mene par tapes dans le but de s'assurer de la
bonne implantation des di@@rents mcanismes du mod4leC Les di@@rentes tapes
pour alider l'int!ration ont t les suiantes :
-ssai de compression isotrope cycliqueC Ce test permet essentiellement de
contrMler la bonne implantation des mcanismes isotropes monotone et
cycliquesC
-ssai de cisaillement cycliqueC Ce test permet un contrMle de l'implantation
correct des mcanismes diatoires monotone et cycliques pour di@@rents
taux de con@inement initialC
-ssais triaxiaux drains monotonesC Ces tests ont permis de alider le
coupla!e de rsolution entre les mcanismes diatoires monotones et le
mcanisme isotrope monotone7 aussi bien pour des matriaux A caract4re
dilatant que contractantC
-ssais triaxiaux non/drains monotonesC Ces tests ont permis de alider le
coupla!e entre les mcanismes diatoires monotones et les mcanismes
isotropes monotone et cycliques7 pour des matriaux lEc"es et densesC
-ssais triaxiaux non drains cycliquesC Ces tests alident le coupla!e entre
8& 9C$ ,ntroduction
les mcanismes isotropes monotone et cycliques7 ainsi que les mcanismes
diatoires monotone et cycliquesC
-ssais cycliques aec rotation du tenseur des contraintes7 qui ont permis de
mettre en aant la @ormulation exacte de l'olution des @acteurs de
mobilisation cycliques diatoire et isotrope RY=C=CH et Y=CHCH SC
L'ensemble de ces rsultats est au%ourd'"ui restitu dans la base de cas/tests du
lo!iciel CodeTAsterC ,ls sont accessibles aux utilisateurs du lo!iciel7 mais !alement
documents et publis en li!ne sur le site de CodeTAsterRUUUCcode/asterCor!SC
La dmarc"e consistait ensuite A raliser une tude de consolidation d'une colonne
de sol7 en modlisant sa construction par couc"es successiesC Cette tude a t
con@ronte aux rsultats obtenus aec le lo!iciel lments @inis de l'-C+7 G-F2ynC
Le lo!iciel d'Jlments Finis G-F2yn contient !alement le mod4le de (u%eux
Rersion 1& Y=C$ S7 int!r selon le mBme sc"ma explicite aec redcoupa!e local
que celui prsent dans LaUyerC
-n@in7 aant l'application du mod4le A la simulation d'un cas d'tude industrielle
Rmodlisation d'une di!ue en terreS7 un c"ar!ement sismique a t appliqu A la
colonne de sol prcdemment construite par couc"esC
Les aspects de stabilit7 robustesse et respect des quations du mod4le sont
dtaills en annexes ;CH et ;C9 RpC#$=S pour un essai biaxial drain et un essai
triaxial non drain cycliqueC Ces essais sont modliss pour di@@rentes aleurs
d'incrments de c"ar!ement dans le but d'aluer les capacits de l'al!orit"me
implicite appliqu au mod4le de (u%eux7 sans redcoupa!e localC
Les conclusions !nrales de ces deux essais sont les suiantes :
Les aleurs des ariables d'tat7 telles que l'tat de contraintes et les
ariables internes du mod4le sont identiques entre les deux codes de calcul
lorsqu'ils ont atteint respectiement la coner!ence de leurs rsultatsC
La coner!ence des rsultats issus du sc"ma implicite est obtenue pour
des aleurs d'incrments au moins $& @ois plus lar!es que les aleurs
obtenues aec le sc"ma d'int!ration explicite aec sous/dcoupa!es
locauxC
+our des incrments de c"ar!ement trop importants7 l'al!orit"me
d'int!ration locale dier!eC ,l apparaQt ncessaire d'introduire des crit4res de
sous/dcoupa!es locaux Roir YHC# et YHC=CH S en ue d'une utilisation
industrielle du mod4leC
Le nombre d'itrations de corrections plastiques locales reste @aible pour les
tra%ets de c"ar!ement monotone mais au!mente rapidement lorsque des
c"an!ements de direction de c"ar!ement suriennentC
Le taux de coner!ence quadratique de l'oprateur tan!ent est obtenu A
partir d'un taux d'incrments minimumC
Le cas/test prsent en annexe ;CF RpC#=9S a t ralis dans le but de solliciter le
mod4le de (u%eux sur un c"emin de c"ar!ement indit et de tester l'aptitude des
deloppements mis en bure A reproduire la @ormulation ori!inale du mod4le de
9 1alidation numrique de l'implantation du mod4le de (u%eux 8$
(u%euxC L'essai tudi s'apparente A un essai de cisaillement cyclique drain
contrMl en @orceC Au cours des cycles de c"ar!e/dc"ar!e7 des micro/dc"ar!es
sont ralises pour tester la capacit du mod4le de (u%eux A retrouer le module de
cisaillement croui aant cette micro/dc"ar!eC Le sc"ma d'int!ration implicite
permet d'obtenir le comportement attenduC
Le para!rap"e suiant RY9C# S dmontre la capacit du CodeTAster A reproduire les
rsultats @ournis par G-F2yn pour l'tude de construction par couc"es d'une
colonne de sol7 suiie d'un c"ar!ement sismique appliqu A la base de la colonneC
:-/ M!*#is&ti!n *8ne c!#!nne ,D *e s!# %i"07&si3e s&tr
L'ob%et de cette tude est de modliser numriquement la pose successie des
couc"es d'une colonne unidimensionnelle de sol7 en prenant en compte A la @ois le
coupla!e "ydro/mcanique Rla consolidation du sol par di@@usion du @luideS et la
plasti@ication du sol due A son comportement non linaire7 puis l'application d'un
c"ar!ement sismiqueC
L'analyse de ce cas @ournit un outil de base pour l'in!nierie !otec"nique : mise en
place de la modlisation de la construction7 mais aussi conolution du si!nal
sismique @iltr par la colonne de solC Ce dernier point est essentiel en analyse
sismique pour dduire de mani4re simpli@i un N e@@et de site O li A la strati@ication
locale des solsC
Les mod4les et la documentation de ces cas/tests sont disponibles sur le site de
CodeTAsterC Les tudes sont r@rences sous les tiquettes LT*1$=# et
L2*+$&$C Les rdacteurs de ces documentations sont MC5"am et GC2eesaC Ces
tests ont permis de alider les mt"odolo!ies de construction par couc"es d'une
colonne de sol et d'application d'un c"ar!ement sismique ralis aec le mod4le de
(u%eux C ,ls ont !alement permis d'amliorer la robustesse des al!orit"mes
d'int!ration locale du mod4le de (u%euxC
+our cette tude7 l'int!ration numrique du mod4le de (u%eux dans CodeTAster
prend en compte les crit4res de sous/incrmentations prsents aux YHC# et YHC=CH C
:-/-, C!nstrcti!n 0&r c!c7es
On sou"aite modliser numriquement la pose successie
des couc"es d'une colonne unidimensionnelle de sol7 en
prenant en compte A la @ois le coupla!e "ydromcanique
et la plasti@ication du sol due A son comportement non/
linaire Rmod4le de (u%euxSC Les solutions calcules sont
compares A des rsultats issus du code par lments
@inis G-F2yn de l'-C+C
5.2.1.1 .omtrie
Le mod4le est constitu de 10+1 lments au total : il
s'a!it de poser $& couc"es de sol sur un substratum
lastique poreux ri!ide reprsent par une $$4me couc"e
indice &7 d'une "auteur de 9m Rillustration 9C$SC C"aque
couc"e est constitue d'un lment de mailla!e R]UA28
Illustration 1.1 : <omtrie
de la colonne de sol sur
substratum roc-eu9
8# 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
en #2 ou (-dA#& en =2S7 d'une "auteur de 2 m 7 d'une lar!eur et d'une
pro@ondeur de 1m c"acuneC La colonne de sol mesure donc 20 m au totalC
+ar principe7 le probl4me est bidimensionnel Rles d@ormations planes se produisent
dans un plan erticalSC On se place de plus dans l'"ypot"4se d'une inariance du sol
par translation "ori3ontaleC Les d@ormations mcaniques et les @lux "ydrauliques
sont donc nuls dans la direction "ori3ontale Rmod4le bdomtriqueSC
5.2.1.2 ,roprits des matriaux
Les proprits lastiques7 inlastiques et "ydrauliques des matriaux utilises sont
dcrites ci/apr4s :
M!*+#e *e H1e.
L!i *8c!#ement H
cr!iss&5e is!tr!0e
Pr!0rits 7(*r&"
#i3es
#&sticit =$ j
s
| kg/ m
3
#:&&
K
ref
| "#+ =$=7$ +
m)n
&7&$: j
e
| kg/ m
3
$&&&
G
ref
| "#+ #$97F +
c-c
&7&&$ B $7&
n
e
&79 c
m)n
&7&8
1iscosit :
+
10
3
#
ref
| "#+ /$7& c
c-c
&7&H K
int
| m
3
/kg / s 10
12
t&t criti3e H P#&stici"
t 0&r2&ite
,
m
&7; H
8
| #+
1
10
&
=$ Sei# *es *!m&ines +orosit &7=9
=& r
el+
&7&$
# r
el+
is)
&7&&$
b &7##
r
h-s
&7&9
#
c!
| "#+ /$7$# r
m)b
&7;
o $79
T&%#e& :-, $ P&r&m+tres m&tri& t&%#is 0&r '!r*1&ni @,DD:B
Le matriau poro/lastique du roc"er est caractris par un module d'6oun! !al A
!000MPa aec un coe@@icient de +oisson de &7= et des proprits "ydrauliques
identiques A celles prcises dans le tableau 9C$C
La aleur de la permabilit du matriau poreux s'obtient A partir de la permabilit
intrins4que7 la iscosit7 la masse olumique de l'eau et l'acclration de
pesanteur
H
C
H On calcule d'abord la conductiit du @luide A partir de la conductiit intrins4que :
\=
K
int
+
=10
'
kg
1
m
3
s
1
[ ce qui donne @inalement pour la permabilit du matriau
poreux : K=j
e
g\=',(110
6
m s
1
9 1alidation numrique de l'implantation du mod4le de (u%eux 8=
5.2.1.3 Conditions aux limites et c-ar0ement
2ans le mod4le considr7 les conditions aux limites s'appliquent aux *+1
couc"es prsentes A l'tape * du calculC -lles sont identiques A celles d'un essai
bdomtrique Rla colonne de sol est un c"antillon d'un espace in@ini par translation
"ori3ontaleS :
Les conditions d'inariance "ori3ontale :
'
,
=0
sur les se!ments latraux [
Une condition de bloca!e de la couc"e ri!ide de substratum :
'
-
=0
sur le se!ment du bas [
Une condition de pression "ydraulique nulle A la sur@ace libre de la colonne
dans le but de simuler une condition de draina!e :
p
8
=0
sur la maille du dessus de la *+1
+me
couc"e Rderni4re
poseS [
Un tat de contrainte e@@ecti@ isotrope initial non nul dans c"aque couc"e
pose7 correspondant au poids d'une couc"e de 1m constitue du mBme
matriau
9
:
#
0
=10 kPa
dans la *+1
+me
couc"e Rderni4re poseS [
Les conditions de c"ar!ement :
L'ensemble de la colonne de sol est soumis A la pesanteur [
La construction de la colonne de sol s'e@@ectue en respectant un laps de temps
At =10
6
s
entre le dbut de l'tape * et celui de l'tape *+1 7 ce qui
correspond A une itesse de construction de
2,10
6
m-s( -1&cm-./ur ) C 2urant ce
laps de temps7 il y a di@@usion du @luide et consolidation de la colonne de sol sous
l'e@@et de son propre poids Rtassement de la colonneSC ,l est important de eiller A ce
que ce laps de temps soit su@@isant en le mettant en rapport aec la aleur de la
permabilit du matriau poreuxC *otamment7 le produit de At aec cette
permabilit donne une distance de di@@usion du @luide qui doit Btre su@@isante Rici de
l'ordre de 10m S par rapport A la dimension de la colonne R 20 m de "auteurSC
P&r!is * m!*+#e >&#ers
C
!
n
*
i
t
i
!
n
s
&
.
#
i
m
i
t
e
s
)AS '
-
=0
FAC-S LAT-'AL-S '
,
=0
(AUT
p
8
=0
Con@inement initial
#
0
=10 kPa
C
7
&
r
"
5
e
m
e
n
t
TOUS
+esanteur
g=',(1 m-s
2
T&%#e& :-/ $ C!n*iti!ns &. #imites et c7&r5ement &00#i3s 0!r #&
c!nstrcti!n *e #& c!#!nne *e s!#
9 Cette initialisation est indispensable pour les matriaux dont les proprits dpendent de
l'tat initial et son c"oix peut aoir des consquences sur la rponse @inaleC
8H 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
5.2.1.4 4roulement du calcul
La mt"ode pour la construction de la colonne de sol est une approc"e multi/
mod4lesC A c"aque tape *+1 du calcul7 un mod4le contenant strictement les
*+1 couc"es poses est construitC Les tats de contraintes7 dplacements et
ariables internes issus de l'tape prcdente sont trans@rs A l'tape *+1 par
des oprations de trans@ert de c"ampC
La modlisation est bidimensionnelle et quasi/statiqueC C"aque couc"e est
reprsente par un lment ]UA28C On utilise une modlisation aec int!ration
compl4te7 soit ; points d'int!rationC L'al!orit"me de *eUton/'ap"son est utilis
pour rsoudre les quations d'quilibre et le mod4le de (u%eux est int!r
implicitementC
Le dsquilibre !lobal maximal exi! est in@rieur A une aleur relatie de
10
10
durant la p"ase de construction de la colonne pour les rsultats @ournis par
CodeTAsterC
L'int!ration numrique7 pour le code G-F2yn Rutilis pour la comparaisonS7 est
e@@ectue par la mt"ode de Gauss en utilisant H points d'int!ration par lment
2D Rextension de l'tude ralise par Lope3/Caballero et Modaressi R#&&FaSSC
Lorsque le probl4me est coupl7 les tests de coner!ence sur G-F2yn sont
ddoubls sur c"acune des parties mecaniques et "ydrauliquesC La coner!ence
est alors considre acquise si quatre tests sont satis@aits : en dplacements/
rotations7 en pressions interstitielles7 en dsquilibre mcanique et en dsquilibre
"ydrauliqueC Les crit4res de coner!ence sont tous normaliss par la aleur de la
ariable d'intrBt au nieau de c"ar!ement prcdent RAubry et Modaressi R$;;FSSC
La tolrance sur les dplacements est !ale A
10
3
et la tolrance sur le
dsquilibre est !ale A
10
2
C L'al!orit"me de *eUton modi@i est utilisC
5.2.1.5 ,ost-traitement des rsultats
Les solutions sont post/traites en termes de tassementC Cependant7 l'utilisation de
la mt"ode multi/mod4les ne donne pas acc4s directement au tassement de la
colonne : le dplacement ertical de la derni4re couc"e pose *+1 est la somme
du tassement rellement induit par cette couc"e et du tassement cumul des
couc"es in@rieuresC ,l est alors ncessaire de retirer ce tassement cumul pour
s'intresser uniquement au tassement subi par la seule couc"e *+1 C
L'illustration 9C# prsente les rsultats obtenus aec CodeTAster pour l'ensemble
des tapesC La courbe @ournie par le lo!iciel G-F2yn est superpose apr4s la pose
de la derni4re couc"eC Les rsultats sont tr4s proc"es entre les deux codes et
coner!ent ers une aleur maximale du tassement de l'ordre de 4 cm au centreC
Le tassement dans la colonne de sol prsente un pro@il symtrique par rapport A un
axe "ori3ontal situ A une "auteur de 1!m Ril @aut a%outer les !m de la
@ondation ri!ideSC 2e @aibles di@@rences apparaissent nanmoins en tBte de colonne
entre les deux codesC
9 1alidation numrique de l'implantation du mod4le de (u%eux 89
L'illustration 9C= prsente en simultan le pro@il des contraintes erticales et de la
pression "ydraulique de la colonne de sol en @in de constructionC Les rsultats
ports sur cette courbe sont issus des lo!iciels CodeTAster et G-F2yn et
apparaissent !alement identiquesC L'quilibre "ydrostatique semble atteint au sein
de la colonne apr4s sa consolidationC La discrtisation spatiale est di@@rente entre
les deux codesC Aec G-F2yn7 les aleurs sont relees en c"aque point de Gauss7
tandis que les rsultats de CodeTAster sont calculs aux nbuds sommets des
lments par extrapolationC
Une comparaison plus @ine entre les deux codes peut Btre ralise en post/traitant
les ariables d'crouissa!e du mod4le de (u%euxC Les rsultats prsents ci/
dessous reprennent les rayons diatoires monotones r
.
m
7 les rayons isotropes
monotones r
is)
m
et les d@ormations olumiques plastiques cumules c
v
p
C 2es
di@@rences plus nettes apparaissent pour le pro@il des rayons diatoires monotones
r
.
m
7 en aleurs mais !alement leurs olutions respecties Rillustration 9CHaSC -n
tBte de colonne7 les rsultats @ournis par G-F2yn prdisent un crouissa!e plus
Illustration 1.' : +omparaison des profils de contraintes 5erticales et de pression ->drauli)ue
en fin de construction de la colonne de sol entre les logiciels +ode;/ster (ronds rouges) et
<CDD>n (carrs bleus)
Illustration 1.2 : #assement de la colonne de sol apr$s sa construction ; (gauc-e.a) (5olution
du tassement au cours de la construction ; (droite.b) +omparaison des rsultats entre
+ode;/ster et <CDD>n
8F 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
important R 0,2-0,! SC Cette di@@rence en tBte de colonne con@irme les
remarques @ormules au re!ard des tassements de la colonneC -n reanc"e7
l'crouissa!e port par le mcanisme isotrope est quasi identique pour les deux
codes Rillustration 9CHbSC ,l en est de mBme concernant les aleurs obtenues pour la
ariable de coupla!e du mod4le7 la d@ormation olumique plastique7 c
v
p
Rillustration 9C9SC
:-/-/ An&#(se sismi3e
La rponse dynamique A une sollicitation sismique est calcule en continuit de
l'tape initiale de pose successie des couc"es ralise en quasi/statiqueC Le
c"ar!ement sismique est appliqu directement apr4s la @in de la construction de la
colonne de sol7 sans temps de reposC
Les analyses sismiques ralises aec G-F2yn Rextension de l'tude ralise par
Lope3/Caballero et Modaressi R#&&FbSS et CodeTAster utilisent un sc"ma
d'int!ration dans le temps de *eUmarI implicite aec =0,! et =0,2!
Illustration 1.* : +omparaison des profils de ra>ons d5iatoires monotones (a.gauc-e) et
ra>ons isotropes monotones (b.droite)
Illustration 1.1 : +omparaison du profil de c
v
p
E la fin de la construction de la colonne
9 1alidation numrique de l'implantation du mod4le de (u%eux 8:
Rsc"ma prsent au Y;C8C#C$ S7 aleurs n'introduisant aucun amortissement li au
sc"ma numriqueC Le rsidu !lobal relati@ sur l'quilibre est @ix A une aleur de
j=10
6
durant le sisme pour le calcul aec CodeTAsterC
Le pas de temps utilis pour les deux lo!iciels est de
10
3
s
C L'c"antillonna!e du
si!nal sismique appliqu est de
10
2
s
C
5.2.2.1 Conditions aux limites et c-ar0ement
Au cours de cette tape7 les conditions aux limites de c"ar!ement sont tr4s
similaires A celles exposes pour l'tude statique prcdenteC La di@@rence ma%eure
proient du bloca!e des dplacements latraux des @aces latralesC Cette condition
est remplace par une condition de priodicit obtenue en rendant !aux les
dplacements des nbuds des @aces !auc"e et droite en is/A/isC
La seconde di@@rence interient sur la couc"e de substratum roc"euxC Les
dplacements "ori3ontaux ne sont plus bloqus sur les bords latraux et des
lments de @ronti4re absorbante A e@@et amortisseur en dynamique sont a%outs
Roir Modaressi R$;8:S et Aubry et Modaressi R$;;#SSC
+our les calculs dynamiques7 un
acclro!ramme est utilis pour simuler
le c"ar!ement sismique Rillustration 9CFS7
norm selon l'acclration maximale
oulueC
24s la @in de la p"ase de construction de
la colonne7 un c"ar!ement
supplmentaire A la pesanteur erticale
est appliquC 2ans un premier temps7
Illustration 1.& : +omparaison des spectres
rponse obtenus en tAte de colonne a5ec
<CDD>n et +ode;/ster en fonction de la
fr)uence (cas ?lasti)ue)
Illustration 1.B : /cclration impose (gauc-e) et spectre norm (droite) au bas du roc-er en
fonction du temps norme E 0,1! g
88 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
une acclration "ori3ontale mono/appui
F
quialente A une pesanteur dans la
direction "ori3ontale7 pondre par une excitation norme A
10
!
m-s
2
est
applique A toute la colonne sur un interalle de 16,(s C Ce premier calcul permet
de solliciter uniquement la colonne de sol de @a0on lastiqueC 2e cette @a0on7 on
s'assure que les sc"mas en temps utiliss dans les deux codes de calcul sont bien
identiquesC
2ans un second temps7 une acclration "ori3ontale mono/appui pondre par une
excitation norme de 0,1! g est applique A l'ensemble de la colonne sur le mBme
interalle de tempsC
5.2.2.2 Rsultats de l/tude
Les rsultats obtenus pour le c"ar!ement sismique rduit sollicitant uniquement une
rponse lastique de la colonne de sol sont prsents sur les illustrations 9C: et 9C8C
Les rsultats sont tr4s concluants et quasi/identiques entre les deux lo!icielsC 2es
di@@rences7 interprtes comme mineures7 sont relees aux pics de rponse sur
l'illustration 9C:C Les sc"mas numriques propres A c"aque code donnent des
rsultats quialents en temps et en @rquenceC
-n prenant en compte l'tat de contraintes du matriau dans la colonne de sol et la
dpendance du module de cisaillement A cet tat de contraintes7 on obtient A partir
de la @ormule analytique la @rquence @ondamentale !ale A f
0
anal
=2,1401 A partir
de la @ormule f
0
=
1
4
i
k
2
si
H
i
7 k tant le nombre de couc"es du milieuC La aleur
obtenue numriquement est tr4s proc"e de la @ormule analytique puisqu'!ale A
f
0
num
=2,2!01 C
Les acclrations relees au sommet de la colonne de sol entre les deux lo!iciels
de calcul sont compares sur l'illustration 9C; R pour le si!nal norm A 0,1! g SC
Les si!naux sont tr4s proc"es entre les deux lo!iciels pour les six premi4res
secondes du si!nalC Les aleurs des acclrations maximales sont du mBme ordreC
On remarque ensuite des di@@rences plus nettes apr4s 6s de si!nalC L'amplitude
de la rponse obtenue aec CodeTAster est alors plus importante et un dp"asa!e
apparaQt entre les deux rponsesC Les rsultats obtenus dans le domaine @rquentiel
F C'est A dire que le dplacement de la colonne est rsolu en rep4re relati@C
Illustration 1.0 : +omparaison de l'acclration rele5e au sommet de la colonne de sol entre
<CDD>n (bleu discontinu) et +ode;/ster (rouge continu) pour une acclration norme E
10
!
m-s
2
9 1alidation numrique de l'implantation du mod4le de (u%eux 8;
con@irme ces di@@rences Rillustration 9C$&aSC On constate nanmoins que le premier
pic de rsonance est bien rele par les deux lo!icielsC Le deuxi4me mode de
d@ormation apparaQt A une @rquence quasi/identique entre les deux lo!iciels7 mais
son amplitude est plus marque aec CodeTAsterC A partir du troisi4me mode de
d@ormation7 les @rquences propres et aleurs de rponses associes sont
di@@rentes et les @rquences plus @aibles aec CodeTAsterC
-n comparant les pro@ils de contraintes e@@ecties et de pression "ydraulique dans la
colonne de sol en @in de sisme R t =16,(s S Rillustration 9C$#S7 on constate
!alement des di@@rences7 localises en tBte et en partie in@rieure de colonneC -n
e@@et7 A une pro@ondeur de 2 m sous la sur@ace libre7 le sol s'est liqu@i aec
CodeTAster R
c
--
-0Pa
S7 tandis qu'aec G-F2yn7 ce p"nom4ne ne se produit
pas en totalitC On obsere nanmoins !alement une monte de pression
"ydraulique A ce nieau de pro@ondeur sur G-F2ynC Les pro@ils de contraintes sont
!alement di@@rents en partie in@rieure oZ les solutions issues de G-F2yn
prsentent une diminution des contraintes e@@ecties7 moins marque sur
CodeTAster Rillustrations 9C$$ et 9C$#aSC
L'illustration 9C$&b prsente le pro@il du dplacement ertical obtenu apr4s le
c"ar!ement sismique pour les deux lo!icielsC On constate des di@@rences plus
marques A partir d'une pro@ondeur de (m C A cette "auteur7 les dplacements
obtenus aec G-F2yn prsentent un incrment important de dplacement axial7
non retrou aec CodeTAsterC Sur l'illustration 9C$#a7 on peut !alement distin!uer
une baisse de l'tat de contraintes e@@ectiesC Apr4s ce point7 les rsultats di@@4rent
en aleurs mais non en terme d'olutionC La di@@rence se rduit @inalement en tBte
de colonne oZ CodeTAster prdit la liqu@action du sol qui produit des dplacements
importantsC
Illustration 1." : +omparaison de l'acclration rele5e au sommet de la colonne de sol entre
<CDD>n (bleu discontinu) et +ode;/ster (rouge continu) pour une acclration norme E
0,1! g
;& 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
Illustration 1.11: (5olution temporelle des contraintes effecti5es 5erticales dans la colonne de
sol; /.+ode;/ster F <.<CDD>n
Illustration 1.1! : (<auc-e.a) +omparaison des spectres de rponse obtenus en tAte de colonne
a5ec +ode;/ster et <CDD>n en fonction de la fr)uence ; (Droite.b) +omparaison des
dplacements 5erticau9 (dG>) dans la colonne de sol E t =16,(s entre +ode;/ster (rond
rouge) et <CDD>n (carr bleu) ;
9 1alidation numrique de l'implantation du mod4le de (u%eux ;$
:-/-4 C!nc#si!n sr #8t*e *e #& c!#!nne *e s!#
Les rsultats sont apparus quasi/identiques entre les deux lo!iciels apr4s les
p"ases de construction par couc"esC Les pro@ils des tats de contraintes e@@ecties7
de pression "ydraulique et de tassements reles sur la colonne de sol ont permis
de s'assurer d'une part que la mt"odolo!ie mise en place dans CodeTAster pour
raliser cette tude de construction tait identique A celle propose par l'quipe de
c"erc"eurs de l'Jcole Centrale +arisC 2'autre part7 cette p"ase de construction a
permis de alider7 sur une structure7 la capacit de l'al!orit"me implicite de (u%eux A
donner des rsultats conaincants tout en utilisant pour l'al!orit"me de *eUton
!lobal la matrice lasto/plastique continue du mod4le de (u%euxC
-n reanc"e7 des di@@rences apparaissent apr4s l'application du c"ar!ement
sismique norm A 0,1! g entre les deux codesC Les rsultats obtenus en tBte de
colonne en terme d'acclration sont tr4s proc"es entre les deux lo!iciels sur les
premi4res secondes du sisme R%usqu'A 6s S7 aant l'apparition de ariations sur
l'amplitude des acclrations releesC Les rponses des spectres d'acclration
dans le domaine @rquentiel prsentent des di@@rences si!ni@icaties apr4s le pic de
rsonanceC 2e mBme7 les pro@ils des contraintes e@@ecties et de pression
"ydraulique sont proc"es7 mais des di@@rences apparaissent nanmoins en des
points particuliers de la structureC La liqu@action en tBte de colonne apparaQt
uniquement aec CodeTAster et une baisse des contraintes e@@ecties A une
"auteur de 1&m apparaQt aec G-F2yn7 qui conduit A des ariations sur les
dplacements erticaux de la colonneC
Mal!r les tests de non r!ression mis en place7 pour tester le mod4le de (u%eux
dans son int!ralit et diers c"emins de c"ar!ement7 des di@@rences subsistent
entre les deux lo!iciels lors de l'analyse sismique de la colonne de solC Le calcul
sismique sollicitant la colonne de sol dans son domaine lastique nous a pourtant
assur que les sc"mas numriques de *eUmarI des deux lo!iciels donnent des
rsultats quasi/identiques dans une situation oZ le coupla!e "ydro/mcanique ne
%oue pas Ronde SSC
Illustration 1.12 : +omparaison des profils de c
--
2
et p
8
rele5s apr$s le sisme (
t =16,(s ) dans la colonne de sol entre +ode;/ster (rond rouge) et <CDD>n (carr bleu) ;
superposition des 5aleurs obtenues en fin de construction de la colonne (Din.++)
;# 9C# Modlisation d'une colonne $2 de sol bi/p"asique satur
La procdure mise en place pour
identi@ier les sources de di@@rences
entre les deux lo!iciels nous a conduit
ensuite A raliser la construction et la
mise sous sisme de la colonne de
sol aec un mod4le purement
mcanique Rcas drainSC Les rsultats
obtenus sont cette @ois/ci beaucoup
plus proc"es et prsents sur les
illustrations 9C$=7 9C$H7 9C$9 et 9C$FC
On ne constate aucun dp"asa!e
particulier entre les deux rponses
des codes pour les acclrations
relees en tBte de colonne7 de mBme
que sur le spectre d'acclration oZ
les = premiers pics de rsonance sont
bien retrous R%usqu'A 10 01 SC
Les di@@rences relees sur l'olution de c
v
p
sont A rapproc"er des dier!ences
constates entre les deux codes pour la !estion des micro/dc"ar!es cycliques
RY;CF S7 conduisant A surestimer la aleur de c
v
p
pour G-F2yn par rapport A Code/
Aster et delopper des nieaux de tassements suprieurs A cette "auteur R
$ =1!m SC Cette modlisation en conditions s4c"es permet tout de mBme de
repousser les di@@rences constates prcdemment sur la prise en compte des
termes "ydrauliques durant le c"ar!ement sismiqueC Cette remarque n'est pas en
contradiction aec les calculs raliss pour un sisme @aible sollicitant uniquement
une rponse lastique de la colonne7 puisque la d@ormation olumique reste nulle
pour un c"ar!ement @aible de cisaillementC La pression "ydraulique dans la colonne
de sol n'olue pas durant ce calculC
Illustration 1.1* : +omparaison des acclrations rele5es au sommet de la colonne de sol
entre +ode./ster et <CDD>n pour une colonne s$c-e (signal norm E 0,1! g )
Illustration 1.1' : +omparaison des spectres de
rponse obtenus en tAte de colonne a5ec
+ode;/ster et <CDD>n en fonction de la
fr)uence en conditions s$c-es
9 1alidation numrique de l'implantation du mod4le de (u%eux ;=
:-4 C!nc#si!n sr #8im0#&nt&ti!n * m!*+#e *e H1e.
Les rsultats obtenus aec le mod4le de (u%eux implant dans CodeTAster selon
un sc"ma d'int!ration implicite sont en accord aec le comportement
p"nomnolo!ique du mod4le incrmentalC Les deloppements raliss7 en
comparaison des rsultats obtenus aec G-F2yn7 sont alids sur une lar!e
!amme de c"emins de c"ar!ementC
La @ormulation du mod4le a !alement t lar!ie pour !rer les tats de traction
des milieux !ranulairesC 2es mcanismes A coulement plastique par@ait ont t
a%outs pour @ermer les sur@aces de c"ar!e diatoires pour des aleurs de pression
Illustration 1.11 : +omparaison des profils de contrainte 5erticale et c
v
p
en fin de sisme
t =16,(s entre +ode;/ster et <CDD>n ; superposition des 5aleurs obtenues en fin de
construction de la colonne (Din.++); cas de la colonne s$c-e
Illustration 1.1B : +omparaison des tassements rele5s durant le sisme entre
+ode;/ster et <CDD>n E diffrents ni5eau9 de -auteur (cas de la colonne s$c-e);
<=<CDD>n et /.+ode;/ster
;H 9C= Conclusion sur l'implantation du mod4le de (u%eux
isotrope proc"e de 3ro RY=C9 SC Ces deloppements sont ncessaires pour des
tudes ralises sur des structures !otec"niques7 oZ des tats de traction peuent
se delopper numriquement ou encore au cours des itrations de *eUton !lobal
aant coner!enceC
L'al!orit"me d'int!ration implicite s'est montr e@@icace sur l'ensemble des c"emins
de c"ar!ement7 aec des per@ormances tr4s intressantes relees lors des essais
quant A la prcision des rsultats @ournis en comparaison notamment du sc"ma
d'int!ration expliciteC
La alidation des deloppements a !alement t entreprise sur l'tude de
construction par couc"es d'une colonne de sol suiie de l'application d'un
c"ar!ement sismiqueC L'application du sisme a permis de tester le mod4le de
(u%eux delopp selon un sc"ma d'int!ration implicite pour des c"emins de
c"ar!ement inditsC La !estion des ariables internes A olution discr4te du
mod4le de (u%eux R 4
k
H
S apparaQt comme tant une di@@icult conduisant A des
dier!ences de rsultats reles entre les deux al!orit"mesC *anmoins7 les
analyses de ces dier!ences lors de l'analyse sismique de la colonne de sol entre
les lo!iciels CodeTAster et G-F2yn semblent Btre en partie lies A la rsolution du
probl4me "ydromcanique coupl durant la p"ase sismique en plus du sc"ma
d'int!ration du mod4le de (u%euxC
La dimension industrielle des deloppements est au%ourd'"ui considre atteinte
du point de ue @iabilit7 robustesse et e@@icacitC La construction par couc"es d'une
di!ue simpli@ie "omo!4ne a t modlise7 suiie de sa mise en eau puis de
l'application d'un c"ar!ement sismique A sa base7 aec le CodeTAsterC Les rsultats
@ournis par le CodeTAster ont t compars et alids pour les p"ases de
c"ar!ement quasi/statiquesC -n parall4le7 l'tude du benc"marI ralis en $;;# sur
la di!ue 3one d'-l ,n@iernillo a !alement t e@@ectue aec le CodeTAsterC L'tude
ralise par 5"am R#&&;S sur la di!ue "omo!4ne est prsente au Y;C: C
Les premi4res conclusions relaties A ces tudes d'ener!ure con@irment la bonne
correspondance des rsultats entre CodeTAster et G-F2ynC L'ensemble des tudes
industrielles a t ralis en utilisant l'oprateur tan!ent continu du mod4le de
(u%euxC Cet oprateur apparaQt donc adapt pour rsoudre les probl4mes non
linaires en lien aec le mod4le de (u%euxC *anmoins7 les p"ases de calcul
ralises ne sollicitent pas de sin!ularits du syst4me d'quations non linaires A
rsoudre au cours du calcul Rles crit4res permettant de caractriser l'apparition de
ces sin!ularits seront prsents au YF SC Les per@ormances en temps C+U de
l'al!orit"me implicite sont tr4s acceptables au%ourd'"ui en comparaison des rsultats
obtenus aec G-F2ynC +our exemple7 la p"ase de construction de la di!ue
simpli@ie ncessite un temps C+U de $"&& aec CodeTAster contre $"&& aec
G-F2yn7 mais ="=&min pour la mise en eau aec CodeTAster contre 8min pour
G-F2ynC ,l @aut nanmoins rester i!ilant quant A ces aleurs7 car elles n'ont pas
t tablies sur les mBmes mac"ines de calcul et la mt"odolo!ie initie dans
CodeTAster pour la mise en eau n'a pas t optimiseC Cependant7 le rapport de
temps C+U entre les deux sc"mas est non n!li!eable7 notamment pour la p"ase
de mise en eauC Comme prcis dans les perspecties du YHC9 7 l'int!ration d'une
mt"ode de rec"erc"e linaire au sein de l'al!orit"me local de *eUton derait
permettre de diminuer le nombre d'itrations de corrections plastiques et ainsi
permettre d'amliorer les itesses de rsolution des probl4mes rsolus aec le
mod4le de (u%eux sous un sc"ma d'int!ration impliciteC
F Stabilit et bi@urcations rencontres en mcanique des sols ;9
< St&%i#it et %i2rc&ti!ns renc!ntres en mc&ni3e
*es s!#s
F Stabilit et bi@urcations rencontres en mcanique des solsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;9
FC$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;9
FC# Jquations du probl4me aux limitesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;:
FC#C$ +robl4me d'olution dynamiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;:
FC#C# +robl4me @ormul en itesse dans le cas quasi/statiqueCCCCCCCCCCCCCCCCCCCCCCCC;8
FC#C= 'ec"erc"e de solutions perturbesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC;;
FC= Analyse !lobale de l'olution du syst4me mcaniqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&$
FC=C$ -xistence et unicit du probl4me en itesse Rcas quasi/statiqueSCCCCCCCC$&$
FC=C$C$ Mod4les lasto/plastiques associs Rou standardSCCCCCCCCCCCCCCCCCCCCCCCC$&#
FC=C$C# Mod4les lasto/plastiques non associs Rnon standardSCCCCCCCCCCCCCC$&#
FCH Unicit et stabilit des solutions au nieau localCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&#
FC9 Jtude de la bi@urcation en bandes localisesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&F
FC9C$ Condition cinmatiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&:
FC9C# Condition statique CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&:
FC9C= Loi de comportementCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&:
FC9CH Condition !nrale de bi@urcationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&8
FC9CHC$ Cas des lois linairesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&8
FC9CHC# Cas des lois multilinairesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&;
FC9CHC#C$ Application au cas bilinaireCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$&;
FC9CHC#C# Cas !nralCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$$
FCF Conclusion sur les crit4res de stabilitCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$#
FC: Microstructure et localisationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$#
FC:C$ C"an!ement d'c"elleCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$#
FC:C# Limite des milieux continus classiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$H
FC:C#C$ Jpaisseur de bandes de cisaillement indtermineCCCCCCCCCCCCCCCCCCCCCC$$H
FC:C#C# 2pendance des rsultats numriques au mailla!e CCCCCCCCCCCCCCCCCCCCC$$H
FC8 Mt"odes de r!ularisationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$9
FC8C$ Mod4les discontinusCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$9
FC8C# Mod4les continusCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$:
FC8C#C$ Mod4les iscoplastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$:
FC8C#C# Mod4les dpendant en espaceCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$8
FC8C#C#C$ Mod4les A ariables r!ularisesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$$8
FC8C#C#C# Mod4les A !radient de ariables internesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#$
FC8C#C#C= Milieux continus micromorp"iquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#$
FC8C= 'etour sur les mod4les de r!ularisationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#9
<-, Intr!*cti!n
Le prsent c"apitre traite d'un probl4me aux limites exprim en itesse7 plus
prcisment en taux de ariations7 appliqu aux structures !otec"niques pour des
mod4les de comportement locaux lasto/plastiquesC Ces probl4mes ne rpondent
pas A la d@inition propose par (adamard R$;&=S des probl4mes dits N bien
poss O dans le cadre de la mcanique des milieux continus [ les conditions
ncessaires pour un probl4me mat"matique N bien pos O reposant sur
l'existence7 l'unicit et la stabilit des solutions is/A/is des conditions initialesC
La notion de stabilit en mcanique non linaire recoure une problmatique
;F FC$ ,ntroduction
associe A l'quilibre !nral d'un syst4me mcanique7 mais aussi relie A l'c"elle
locale de la relation constitutieC -lle int4!re le comportement d'une perturbation
dans le syst4me d@ini A l'aide de crit4res7 qui d@inissent le comportement ultrieur
du syst4meC La condition de stabilit est relatie A la sensibilit de la solution du
probl4me dynamique7 si elle existe7 par rapport aux perturbationsC La stabilit au
sens de Lyapuno R$;&:S stipule que les perturbations inities autour de la position
dDquilibre resteront bornes si la solution est stable7 ou sDampli@ieront pour une
solution instableC -n reanc"e introduire7 puis retirer une perturbation dynamique
dans un syst4me ne !arantit pas le retour de l'tat du syst4me A la branc"e de
solutions initiale7 mBme si elle est stableC
Les mod4les de comportement des sols7 les plus proc"es des rsultats
exprimentaux proposs dans la littrature7 sont construits sur des mod4les lasto/
plastiques A simple ou multiples seuils plastiques7 aec coulement plastique non
associ R*oa7 $;8# [ (u%eux7 $;89SC La consquence de la prise en compte de tels
mod4les pour dcrire le comportement p"nomnolo!ique du matriau est une
perte de symtrie du tenseur de ri!idit localC
2e plus7 les rsultats exprimentaux montrent un comportement adoucissant de ces
matriaux pour diers c"emins de c"ar!ement7 menant alors A des points sin!uliers
sur les courbes de rponse pour les structures tudiesC Ces points sin!uliers
correspondent mat"matiquement A des sin!ularits du syst4me d'quations tabli
pour exprimer l'quilibre du domaine considrC A ces points sin!uliers7 des
bi@urcations de solutions peuent apparaQtre et di@@rentes branc"es de solutions
peuent Btre construites7 A partir de la branc"e @ondamentale d@inie %usqu'ici par les
conditions initiales et suppose stableC
L'analyse aux aleurs propres de l'oprateur tan!ent du syst4me d'quations tabli
pour exprimer le probl4me aux limites discrtis A rsoudre permet de dtecter ces
points sin!uliersC Le c"an!ement de si!ne du dterminant de l'oprateur tan!ent
correspond au passa!e d'une branc"e unique de solutions A des branc"es de
solutions en nombre ariableC L'annulation d'une aleur propre de cet oprateur
correspond7 entre autres7 A la perte d'unicit du probl4me aux limites posC
Les outils existants pour la dtection des bi@urcations dues A des e@@ets
!omtriques ne sont pas applicables aux cas des bi@urcations matrielles
introduites ci/dessusC -n e@@et7 l'oprateur tan!ent du syst4me n'est alors pas
continu driable7 ce qui rend impossible l'utilisation des crit4res bass sur la
drie seconde de l'ner!ie potentielle7 la stabilit de l'quilibre tant d@inie par le
caract4re minimum local de l'ner!ie potentielle R*!uyen7 #&&&SC La perte de
continuit de l'oprateur tan!ent est lie A la p"ase de transition entre les r!imes
lastique et plastique du matriauC Les relations locales incrmentales des mod4les
constituti@s ne sont alors plus di@@rentiablesC
Les outils A disposition pour analyser ces modes de bi@urcation sont donc restreints
aux proprits de l'oprateur tan!ent du syst4me d'quations du probl4me aux
limites @ormul en itesseC Les notions d'unicit et de stabilit seront abordes en
r@rence aux traaux antrieurs7 A la @ois aux nieaux local et !lobal7 le tout
appliqu aux mod4les de comportement lasto/plastiqueC
Les lments delopps dans ce c"apitre ne constituent pas des aances
scienti@iques sur le t"4me de la stabilit des probl4mes aux limites rencontrs en
mcanique des solsC ,ls ont ocation A prsenter7 sous une ision synt"tique7 les
ob%ets mat"matiques permettant de caractriser les p"nom4nes mis en %eu aux
F Stabilit et bi@urcations rencontres en mcanique des sols ;:
c"elles locale et !lobale des structures !otec"niques tudies lorsque leurs
stabilits sont perduesC Ce c"apitre nous permet de %usti@ier le c"oix des crit4res de
stabilit utiliss par la suite dans le cadre de nos tudes pour caractriser leurs
pertes de stabilitC
<-/ 3&ti!ns * 0r!%#+me &. #imites
La premi4re tape consiste A poser conenablement le probl4me aux limites que
lDon c"erc"e A rsoudre pour tudier ensuite les proprits de ses solutionsC Le
principe de base utilis pour exprimer les quations d'quilibre du probl4me pos
dans le cadre de la mcanique des milieux continus est le principe des puissances
irtuellesC Le probl4me aux limites est alors crit sous la @orme @aible d'un syst4me
d'quations aux dries partiellesC
<-/-, Pr!%#+me *8;!#ti!n *(n&mi3e
Le probl4me consiste A tudier lDolution dynamique dDun milieu continu7 de
domaine D et de @ronti4re D 7 suppos A l'quilibre et soumis A une
sollicitation entre deux instants t
0
et t
1
C Cette olution s'crit sous la @orme
d'un syst4me d'quations partielles d'ordre $ :
U (t )=F ( U(t )) RFC$S
aec U(t ) le ecteur dplacement des inconnuesC
Le probl4me est ici @ormul en petites d@ormations et restreint aux matriaux non
isqueuxC Les ariables sont exprimes en con@i!uration La!ran!ienne et une
olution r!uli4re de l'acclration est supposeC Les quations dDquilibre7
exprimes A lDinstant t compris entre les instants t
0
et t
1
7 sDobtiennent au
moyen du t"or4me des puissances irtuelles :
+our tout couple ('
t
, c
t
) et tout c"amp cinmatiquement admissible
6v2
0
:
|
D
c
ij
t
c
ij
(6 v) d D+
|
D
j
'
i
t
6v
i
dD
|
D
jf
i
t
6v
i
dD
|
Dc
t
i
t
6 v
i
d I=0
RFC#S
aec :
2
0
: l'espace ectoriel de (ilbert des c"amps de dplacement admissible7
s'annulant sur la @ronti4re
D
'
[
D : le domaine occup A l'instant t 3
D
c
: la partie de la @ronti4re D oZ les ecteurs contraintes sont connusC La
partie complmentaire
D
'
de D est d@inie comme suit :
D
'
D
c
=D et D
'
iD
c
=Y 3
c
ij
t
: les composantes du tenseur des contraintes de Cauc"y A l'instant t [
6v
i
: les composantes du c"amp de itesse irtuel cinmatiquement admissible A
l'instant t C Ces c"amps admissibles sont restreints aux conditions suiantes : ils
doient Btre driables et
6v
i
=0
sur
D
'
[
;8 FC# Jquations du probl4me aux limites
t
i
t
: les composantes des ecteurs @orces par unit de sur@ace appliqus A l'instant
t [
j : la masse olumique du solide [
f
i
t
: les composantes des @orces olumiques appliques A l'instant t [
L'tat de contraintes c est quant A lui obtenu A partir d'une relation incrmentale
reliant le taux de contraintes au taux de d@ormation par l'intermdiaire d'un
oprateur lastoplastique tan!ent7 c
ij
=H
ijkl
c
kl
C Cet oprateur7 tenseur du H
4me
ordre7 dpend de l'tat de contraintes et de ariables internes actuelsC
<-/-/ Pr!%#+me 2!rm# en ;itesse *&ns #e c&s 3&si"st&ti3e
Soit une con@i!uration
D
t
d@inie au temps t et une autre
D
t+At
au temps
t +At 7 toutes deux A l'quilibreC Le probl4me expos se limite A prsent A
considrer uniquement des sollicitations quasi/statiques monotones7 les termes
dDinertie nDtant plus pris en compteC On peut alors crire les !alits suiantes
restreintes aux cas des petites d@ormations Ron ne tient pas compte des ariations
de !omtrie de D durant cet interalle de temps7 soit
D
t
=D
t +At
=D
S :
+our tout c"amp cinmatiquement admissible
6v2
0
:
au temps t
|
D
c
ij
t
c
ij
( 6v) dD
|
D
j f
i
t
6 v
i
d D
|
Dc
t
i
t
6 v
i
d I=0
RFC=S
au temps t +At :
|
D
c
ij
t+At
c
ij
( 6v ) d D
|
D
j f
i
t+At
6 v
i
d D
|
Dc
t
i
t+At
6 v
i
d I=0
RFCHS
La di@@rence entre ces deux quations permet d'obtenir les quations du probl4me
@ormul en itesse lorsque At tend ers & RC"ambon R#&&HaSSC
|
D
c
ij
c
ij
(6 v) dD
|
D
j
f
i
t
6 v
i
dD
|
Dc
t
i
t
6v
i
d I=0
RFC9S
oZ c
ij
7
t
i
7
f
i
sont les dries temporelles des termes introduits dans
l'quation FC=C
Le probl4me d'olution7 exprim au YFC#C$ 7 permet notamment d'appr"ender les
notions de stabilit des solutions des probl4mes aux limites possC Le para!rap"e
suiant introduit A ce probl4me d'olution une perturbation en dplacement7 dont
on c"erc"e A analyser la stabilitC Cette approc"e se d@init comme la mt"ode de
perturbation linaire7 oZ la perturbation introduite est in@iniment petite pour pouoir
@aire un deloppement limitC
F Stabilit et bi@urcations rencontres en mcanique des sols ;;
<-/-4 Rec7erc7e *e s!#ti!ns 0ertr%es
Soit une con@i!uration
D
t
i
d@inie A l'instant
t
i
A l'quilibre et soumise A aucune
@orce extrieureC 2urant l'interalle de temps |
t
i
, t
0
7 aucun point sin!ulier en
rponse n'est apparu7 ce qui !arantit l'unicit des solutions sur cette branc"e
@ondamentaleC A l'instant
t
0
7 une perturbation est superpose A la solution et son
comportement est analysC La stabilit du syst4me reste assure si de petites
perturbations produisent uniquement des c"an!ements limits de la solutionC Un
exposant & est a%out A tous les c"amps correspondant A la solution "omo!4neC
2ans le cadre expos ci/dessus7 nous analysons A prsent le comportement des
c"amps perturbs
'='
0
+6'
et
c=c
0
+6c
R
6'<'
0
et
6c<c
0
SC
-n considrant la linarit des termes inertiels7 la di@@rence entre les deux
quations exprimant le principe des puissances irtuelles pour ces deux c"amps de
solutions R"omo!4ne et perturbS permet d'obtenir la relation suiante sous sa
@orme @aible :
Trouer (6' ,6c) tel que :
di4 6c
i
j6 '
i
=0
6 c
ij
=H
ijkl
0
(
c
kl
(6 ')
)
RFCFS
Rem&r3e , : La relation prcdente est !ouerne par les proprits de
l'oprateur tan!ent
H
t
7 plus prcisment par la drie temporelle de droite de
l'quation d'tat du mod4le de comportement7 calcul en (' , c) dans la direction
c(6 ') C +our la suite de l'analyse7 la solution de r@rence dont on tudie la
stabilit sera considre en permanence en c"ar!eC Les dc"ar!es lastiques
issues de la perturbation sont n!li!esC Cette restriction limite la alidit des
rsultats au re!ard des instabilits en dynamique de type @lottement7 puisque les
oscillations induites par ce p"nom4ne peuent conduire A des dc"ar!es du
matriau R)enallal et Comi R#&&#SSC
Rem&r3e / $ On ne tient pas compte de la ariation de l'oprateur tan!ent en
@onction du c"amp perturb
\=
\
0
+6
\
C Ces termes sont utiles pour une analyse
@ine du point d'mer!ence de solutions perturbes non bornesC ,ls ne sont pas
ncessaires en reanc"e pour caractriser une olution non borne de la
perturbationC Cette analyse a t mene par )enallal et Comi R#&&#S dans le cadre
des milieux poreux satursC
A partir du syst4me linaris autour de la solution de r@rence7 le probl4me aux
aleurs propres de ce syst4me peut Btre obtenu directement en supposant des
perturbations de la @orme !nrale : 6 4 =
4 exp(i (n ,+(t t
0
)) 7 aec n une
direction de polarisation RecteurS7 ( le nombre d'onde de la perturbation et 7
qui peut Btre reli au taux de croissance de la perturbation dans le tempsC Le c"oix
de cette @orme est quialent A l'application de la trans@orme de Fourier A des
c"amps de d@ormations polarises dans l'espace au syst4me "omo!4ne prsent
en FCFC
Une olution non borne de la perturbation introduite se caractrise par - :
$&& FC# Jquations du probl4me aux limites
i ( c
ij
n
j
j
2
'
i
=0
c
ij
= H
ijkl
t
e
u
c
kl
c
kl
=
i (
2
( '
k
n
l
+n
k
'
l
)
RFC:S
Le syst4me prsent en FC: peut se rduire A une quation unique contrMlant les
dplacements du milieu ' :
(
2
( n H n) '+j
2
'=0
RFC8S
On obtient alors l'quation aux aleurs propres suiantes :
det | (
2
( n H n)+j
2
/ =0 RFC;S
)enallal et Comi R#&&#S tablissent un rapproc"ement entre la @orme des solutions
du syst4me perturb linaris et les solutions de la @orme ondes "armoniques
propa!aties7 caractrises par =i (c 7 aec c la clrit de l'ondeC -n
re%etant le cas c- 7 ils tablissent que les olutions non bornes des
perturbations correspondent A (- C Les croissances illimites R +()- S
sont d@inies par la condition ncessaire et su@@isante que
c
2
<0
ou
c
2
est
complexeC Une olution non borne des perturbations introduites est alors relie A
des discontinuits stationnaires R c=0 S ou des instabilits par @lottement
R@ortement lies A l'"ypot"4se initiale de solide linaire de comparaison7 YFC=C$C$ SC
)enallal et Comi R#& #&&=S tendent l'approc"e par perturbation linaire aux
milieux poreux saturs inlastiques sous c"ar!ements quasi/statique et dynamiqueC
,ls en d!a!ent les conditions d'initiation de perturbations croissantes et aussi les
conditions d'olutions non bornes des perturbationsC Les conditions de croissance
non borne des perturbations introduites sont similaires A celles prsentes ci/
dessus RqC FC;S pour les c"ar!ements dynamiquesC +our le cas de c"ar!ement
quasi/statique7 ils tablissent des di@@rences quant aux conclusions A tablirC
+our un mod4le de comportement non associ7 des instabilits de @lottement
peuent apparaQtre uniquement sous c"ar!ement dynamiqueC
-n dynamique7 les conditions de croissance illimite se caractrisent
uniquement par (- Rmode localisSC -n quasi/statique7 des modes
di@@us peuent apparaQtre en conditions non drainesC
-n annexe ;C8 7 une analyse !nrale des syst4mes dynamiques est prsenteC
-lle est dtaille suiant l'approc"e continue et !alement discrtise selon le
sc"ma d'int!ration temporelle de *eUmarIC On s'intresse alors pour ce dernier
cas au comportement du sc"ma de *eUton A l'introduction d'une perturbation
autour de la solutionC On peut ainsi d!a!er des crit4res d'instabilits dier!entes
relati@s aux oprateurs discrtiss de raideur du syst4meC
F Stabilit et bi@urcations rencontres en mcanique des sols $&$
<-4 An&#(se 5#!%&#e *e #8;!#ti!n * s(st+me mc&ni3e
<-4-, E.istence et nicit * 0r!%#+me en ;itesse @c&s 3&si"st&"
ti3eB
-n $;987 (ill propose une condition su@@isante d'unicit pour un probl4me @ormul en
itesseC ,l consid4re pour ce probl4me un solide de olume D C ,l dmontre que
l'unicit du probl4me @ormul en itesse est assure par la condition FC$&7 dans le
cadre des petites d@ormationsC (ill a nonc initialement cette condition en !randes
trans@ormationsC
+our tout couple de c"amps de itesse '
i
1
et '
i
2
cinmatiquement admissible7
|
D
A c
ij
A c
ij
d v>0
RFC$&S
oZ c
ij
est le taux du tenseur de contraintes de Cauc"y associ au taux de
d@ormation c
ij
C
Le terme A correspond A la di@@rence entre deux c"amps admissibles7 c'est A
dire :
A c
ij
= c
ij
2
c
ij
1
A c
ij
= c
ij
2
c
ij
1
C
+our un mod4le constituti@ incrmental linaire7 le tenseur de ri!idit ne dpend que
de l'tat de contrainte et de l'"istoire de c"ar!ement incrmental du matriauC
L'int!ration de l'quation FC$& coPncide aec l'expression du traail du second ordre
Rnotion d@inie ultrieurementSC +ar consquent7 l'unicit de la solution sera assure
si et seulement si le tenseur de ri!idit est d@ini positi@C
L'quialence nonce ci/dessus est en reanc"e plus di@@icile A dmontrer pour des
mod4les constituti@s incrmentaux non linairesC
C"ambon et Caillerie R$;;;S ont traaill sur ce su%et pour des mod4les lasto/
plastiques A un mcanisme7 "ypo/plastiques ou A endomma!ementC ,ls ont alors
prou7 tout d'abord A l'c"elle locale7 que la positiit de la densit du traail du
second ordre pour toute itesse de d@ormation coPncide aec les termes mis en %eu
localement dans l'int!rale de l'quation FC$& :
Lemme :
5i \ c
ij
, d
2
6= c
ij
c
ij
>o c
ij
2
a4ec o>0
al/rs p/ur \A c
ij
, A c
ij
A
c
ij
>oA c
ij
2
et in4ersement
RFC$$S
+uis7 A l'c"elle !lobale7 ils en ont dduit que la positiit de la densit du traail du
second ordre de tous les points du domaine D est une condition su@@isante
d'unicit de la solution du probl4me @ormul en itesseC
C"ambon R#&&HaS @ait !alement remarquer que ce t"or4me d'unicit reste rai
pour tout sous/domaine de D et indpendamment des conditions aux limitesC
$&# FC= Analyse !lobale de l'olution du syst4me mcanique
L'analyse pour dterminer l'unicit des solutions du probl4me aux limites peut
par@ois Btre ramene A l'tude d'un probl4me linaire7 oZ il @aut cette @ois/ci
distin!uer pour ces approc"es les mod4les lasto/plastiques A coulement associ
et ceux A coulement non associ Rc@ YFC#C= SC
5.3.1.1 Modles lasto-plastiques associs %ou standard(
Les mod4les lasto/plastiques associs ri@ient la r4!le de normalit7 c'est A dire
que l'coulement plastique issu du mod4le constituti@ est normal A la sur@ace de
c"ar!e du mod4le constituti@C Ce type de comportement n'apparaQt pas comme le
plus adapt pour reprsenter celui des !omatriauxC
-n s'intressant A l'unicit et A la stabilit des solutions issues du probl4me aux
limites considr7 (ill R$;98S ne restreint pas son analyse aux seuls modes de
d@ormation !nrant une localisation des d@ormations7 mais coure d'autres types
de modes tels que les modes di@@us par exempleC
+our simpli@ier le probl4me non linaire li A l'oprateur tan!ent du mod4le
constituti@7 (ill introduit la notion de solide linaire de comparaisonC ,l s'a!it d'un
solide linaire @icti@ qui7 pour toutes les directions de sollicitations7 reproduit le
comportement en c"ar!e du solide lasto/plastique relC (ill dmontre alors que la
bi@urcation du solide rel ne peut prcder celle du solide linaire de comparaisonC
5.3.1.2 Modles lasto-plastiques non associs %non standard(
A la suite des traaux de (ill R$;98S7 la condition su@@isante d'unicit a t tendue et
!nralise aux mod4les lasto/plastiques non associs A simple potentiel plastique
par Maier R$;:&S7 (uecIel et Maier R$;::S7 'aniecIi R$;:;S7 'aniecIi et )ru"ns
R$;8$S7 ainsi que )i!oni et (uecIel R$;;$SC
Ces auteurs ont introduit de noueaux solides linaires de comparaison7 A
coulement plastique normalC 2eux solides linaires de comparaison sont d@inis
pour raliser A prsent un encadrement de la c"ar!e critique7 !nrant une
bi@urcation du solide relC
Le solide linaire de comparaison permettant d'tablir une borne in@rieure du
c"ar!ement en!endrant une bi@urcation du solide rel rpond A la d@inition d'un
matriau standard7 dont les proprits peuent Btre modi@ies par l'introduction d'un
param4tre scalaireC Ce param4tre doit Btre a%ust pour tablir au mieux cette borne
in@rieureC
+our la borne suprieure de l'encadrement7 le solide linaire de comparaison
considr est d@ini de @a0on analo!ue aux mod4les associsC Le tenseur tan!ent
d@inissant ce solide @icti@ correspond alors au tenseur du solide lasto/plastique rel
le lon! du c"emin de c"ar!ementC Cette borne sera e@@ectiement suprieure7 A
condition que le mode de bi@urcation dcel sollicite bien les points de c"ar!ement
identi@is comme tant en c"ar!e RC"ambon R#&&HaSSC
+our les mod4les incrmentaux non linaires non associs7 des modes de
bi@urcation7 qui correspondent A la perte d'unicit de la solution7 peuent apparaQtre
antrieurement aux modes localiss en bandes de cisaillementC
<-9 Unicit et st&%i#it *es s!#ti!ns & ni;e& #!c&#
2ans ce para!rap"e7 l'expos porte sur une synt"4se des mt"odes d'analyse de la
F Stabilit et bi@urcations rencontres en mcanique des sols $&=
stabilit matrielle des mod4les lasto/plastiquesC Les instabilits dues A des e@@ets
!omtriques Rle @lamba!e d'une poutre en est un exempleS et dues A des e@@ets
dynamiques Rinstabilits par @lottement induites par des e@@ets d'inertie ou de non/
linarits matriellesS ne sont pas traitesC
Les tudes menes dans le prsent para!rap"e se restrei!nent au cadre des
mod4les de comportement lasto/plastique7 indpendants en itesse7 dont
l'expression !nrale est donne par la relation suiante :
c
ij
=H
ijkl
c
kl RFC$#S
aec H l'oprateur tan!ent qui est construit A partir de l'"istoire de c"ar!ement en
contraintes et en d@ormations Rtat caractris par des ariables d'tat et
param4tres d'"istoire7 o SC Cet oprateur dpend !alement de la direction du
taux de d@ormation7 c C H est symtrique pour les matriaux associs et non
symtrique pour les cas non associsC
Les instabilits matrielles rencontres dans la nature se distin!uent suiant deux
modes7 un mode localis et un mode di@@usC Le mode localis s'tablit t"oriquement
en rec"erc"ant une solution alternatie A la solution "omo!4ne du probl4me
considr7 @aisant apparaQtre une bande de localisation Rcette tude sera aborde
ultrieurement au YFC9 SC Les modes de rupture di@@use ne @ont pas interenir de
bandes de localisation et sont d@inis par un c"amp de dplacement c"aotique en
espaceC
,l est intressant d'appliquer et d'interprter ici la d@inition de stabilit de Lyapuno
R$;&:SC La stabilit dDune solution A un probl4me sDexprime !nralement ia la
d@inition propose par Lyapuno R$;&:SC 2ans le cadre des milieux continus7 la
d@inition peut sDexprimer comme suit : N %Htat de contrainte et de dformation dHun
matriau a5ec une -istoire de sollicitations donnes est dit stable si pour tout
scalaire positif e il e9iste j(e) de
R
"
tel )ue pour tout incrment de
sollicitation born par j la rponse associe demeure borne par e . O R2are
et alC R$;;9S[ )amber!er R$;8$SSC
-n dDautres termes7 toute perturbation apporte A un tat limite de contrainte Rdit de
ruptureS conduisant A une rponse totalement di@@rente du mode de d@ormations
prcdemment tabli est une proprit dDun tat instableC
La notion de rupture associe aux matriaux N dits standard O Rri@iant la r4!le de
normalitS correspond A l'existence d'un tat limite de contraintes7 caractris par
une d@ormation indtermine pour un taux de contraintes nul Rpalier plastique
par@aitS :
c
ij
=0 et c
kl
indtermin
RFC$=S
La condition prcdente implique la proprit suiante pour l'oprateur tan!ent
constituti@ :
$&H FCH Unicit et stabilit des solutions au nieau local
det ( H )=0
RFC$HS
Cette condition constitue un crit4re d'instabilit pour les matriaux associsC
La condition de plasticit par@aite d@init seulement une direction d'coulement
plastique7 mais pas son intensitC
Les analyses classiques de stabilit du domaine des !omatriaux reposent sur ce
crit4re limite de plasticitC Or7 dans le cadre de l'lastoplasticit A coulement
plastique non associ7 (ill R$;F#S7 T"omas R$;F$S7 Mandel R$;FHS et )i!oni et
(uecIel R$;;$S ont montr que des instabilits pouaient se delopper A l'intrieur
strict du crit4re limite de plasticit7 telles que le p"nom4ne de liqu@action des sols
par exempleC
+our raliser cette analyse7 (ill R$;98S propose une condition su@@isante de stabilit
Roir aussi +etryI7 $;;;SC Selon (ill7 un tat de contrainte/d@ormation est instable si
un processus de d@ormations pour une direction de c"ar!ement donne peut Btre
en!endr et poursuii sans l'apport d'ner!ie extrieure R2are et alC7 $;;9 [ 2are
et Laoua@a7 #&&& [ 2are et alC7 #&&H [ 2are et Lambert7 #&&HSC La condition de
stabilit de (ill indique @inalement qu'un tat de contrainte/d@ormation est stable7 si
pour tout couple ( c, c) reli par la relation constitutie du matriau7 la densit du
traail du second ordre est strictement positi@ :
d
2
6= c
ij
c
ij
>0
RFC$9S
+our les relations "yperlastique/plastique7 le postulat de 2rucIer R$;9;S R
c
ij
c
p
ij
>0 S implique la condition de (illC -n e@@et7 on a c
ij
c
ij
e
>0 pour les
mod4les "yperlastiques et la dcomposition classique en lasto/plasticit des
d@ormations en une partie lastique et plastique assure c
ij
c
ij
= c
ij
c
ij
e
+ c
ij
c
ij
p
>0 C
La condition de stabilit nonce par (ill R$;98S7 !alement appele condition de
positiit du traail de second ordre7 apparaQt moins restrictie que celle de 2rucIer7
portant uniquement sur les coulements plastiques locauxC
2ans le cadre de l'lasto/plasticit associe en petites d@ormations7 (ill R$;:8S a
montr que la positiit du traail du second ordre est assure tant que le module
d'crouissa!e h>0 Rc@ quation #C$& du Y#C=CH SC 24s que le module
d'crouissa!e prend des aleurs n!aties Rc'est A dire p"ase de radoucissement
du matriau et perte d'inersibilit de la relation FC$#S7 la aleur du traail du second
ordre est alors n!atieC
*oa R$;;HS7 d'un point de ue d'exprimentateur7 s'intresse aux conditions
d'unicit de la rponse "omo!4ne d'un probl4me aux limites qu'est un c"antillon de
laboratoireC Cet c"antillon peut Btre soumis A des conditions de c"ar!ement
complexes7 imposes par des asserissements en contraintes7 en d@ormations ou
mixtes Rc'est A dire contrMlabilit de l'essaiSC *oa a montr que7 pour un mod4le
lasto/plastique A un mcanisme7 la perte de contrMlabilit Rou d'unicitS correspond
A la perte de positiit du traail de second ordre et A l'annulation du dterminant de
la partie symtrique de l'oprateur constituti@ lasto/plastique ROstroUsIi et TaussIy
F Stabilit et bi@urcations rencontres en mcanique des sols $&9
R$;9$S7 cit par *oa7 #&&HSC Ce rsultat a par la suite t tendu aux mod4les
"ypoplastiques dans un cas restreint par -l (assan R$;;:S7 puis dans le cadre
!nral par *iemunis R#&&#SC 2epuis7 l'quialence entre la positiit d@inie du
traail du second ordre et l'unicit a t montre par C"ambon R#&&HbS Rc@ lemme
FC$$ du YFC=C$ SC
La condition de stabilit de (ill prend !alement souent le nom de crit4re local
d'unicitC -n e@@et7 pour une @ormulation multilinaire incrmentale des quations de
comportement7 comme FC$# 7 les instabilits matrielles dtectes A l'aide de ce
crit4re coPncident aec la perte de d@inie/positiit de la partie symtrique du
tenseur constituti@ lasto/plastique
H
s
C Une condition ncessaire de perte
d'unicit est alors :
det ( H
s
)=0
RFC$FS
Considrons un mod4le lasto/plastique tabli A partir d'un crit4re f (c , o)<0 7
@onction des contraintes c et o l'ensemble des ariables d'crouissa!e dont les
lois d'olution sont supposes aoir la @orme o=
\r C Un potentiel plastique
d'coulement g (c) d@inissant une r4!le d'coulement non associe compl4te la
d@inition du mod4leC
\ est le multiplicateur plastique satis@aisant les relations
classiques de 5u"n/TucIer
\0 7 f (c , o)<0 et
\f ( c, o)=0 C
L'expression explicite de l'oprateur tan!ent7 en condition de c"ar!e plastique7 est
donne par la relation suiante7 A partir de la relation de consistance
f (c , o)=0 :
H
ijkl
=A
ijkl
(
A
ijnm
g
c
nm
)
(
f
c
rs
A
rskl
)
h+
f
c
nm
A
nmrs
g
c
rs
RFC$:S
oZ h est le module instantan d'crouissa!e R h=
f
o
r S et A
ijkl
le tenseur
lastiqueC H
ijkl
n'est pas symtrique7 A moins que le potentiel plastique g ne
coPncide aec le crit4re f C
Lorsque h est n!ati@7 le matriau prsente un comportement radoucissantC La
aleur seuil de h=0 correspond au cas limite de la plasticit par@aiteC Le
comportement de N snap/bacI O est contrMl par le terme
(
h+
f
c
nm
A
nmrs
g
c
rs
)
C
Ce p"nom4ne ne peut pas apparaQtre si on assure la condition
h>
f
c
nm
A
nmrs
g
c
rs
C Mr\3 R$;F=S a d@ini des interalles de aleurs pour h
a@in de dlimiter le domaine d'unicit de la rponseC Si
h>h
'
7 l'unicit est assure
pour tout incrment de d@ormations Ret l'inerse si
h<h
'
SC
(uecIel et Maier R$;::S et Maier et (uecIel R$;:;S ont montr pour ce type de
mod4le que la perte de positiit du traail de second ordre est lie A une aleur
critique du module plastique d'crouissa!e :
$&F FCH Unicit et stabilit des solutions au nieau local
h
cr
'
=
1
2 |
.
(
f
c
ij
: A
ijkl
:
f
c
kl
)
(
g
c
ij
: A
ijkl
:
g
c
kl
)
f
c
ij
: A
ijkl
:
g
c
kl
RFC$8S
+our le cas de la plasticit A coulement associ R f =g S7 le module
d'crouissa!e critique deient !al A 3ro :
h
'
=0
C +our les matriaux
caractriss par un mod4le lasto/plastique non associ7 la perte de positiit du
traail de second ordre interiendra tou%ours aant la condition exprime par la
relation FC$HC
<-: t*e *e #& %i2rc&ti!n en %&n*es #!c&#ises
Les crit4res prsents dans cette section permettent d'appr"ender les probl4mes
de bi@urcation en bande localise7 p"nom4ne obser lar!ement dans la nature et
en laboratoire au cours d'expriences oulues initialement "omo!4nesC
2ans la nature7 on peut obserer la localisation des d@ormations au sein des
@ormations !olo!iques comme les @ailles et les plissements7 par exempleC Les
bi@urcations obseres en laboratoire sur des c"antillons initialement "omo!4nes
conduisent A la localisation des d@ormations dans des bandes de cisaillement ou
de compaction par exempleC +armi ces essais7 on peut citer les essais uniaxiaux de
traction sur les matriaux ductiles Rli!nes de LedersS et les essais triaxiaux de
compression raliss sur les sols et les roc"esC Les essais raliss sur des
c"antillons de sol initialement "omo!4nes peuent Btre des essais biaxiaux
R1ardoulaIis7 $;8& [ 2esrues7 $;8H [ 2esrues et C"ambon7 $;8F [ cit par
1ossou!"i #&&$S7 des essais A l'appareil triaxial R1ardoulaIis7 $;:; [ 2esrues7
$;;& [ 1ardoulaIis et Sulem7 $;;9 [ 2esrues et alC $;;F [ cits par 1ossou!"i #&&$S
et des essais A la boQte de cisaillement RScarpelli et Lood7 $;8# cit par 1ossou!"i
#&&$SC
Une bande de cisaillement est une 3one linaire7 d'paisseur r!uli4re et non nulle7
dans laquelle la d@ormation de cisaillement est relatiement @orte par rapport A la
d@ormation A l'extrieur de la bandeC ,l existe une discontinuit de la d@ormation
aux @ronti4res de cette bande7 mais le c"amp de dplacement reste quant A lui
continuC
L'en%eu consiste alors A reproduire dans le cadre t"orique ces p"nom4nes
naturelsC Les premiers traaux relati@s A l'tude t"orique de la localisation ont t
mens par (adamard R$;&=SC Ces traaux reposent sur l'analyse de la itesse de
propa!ation d'ondes d'acclration dans les solides lastiques linairesC La bande
de cisaillement est considre comme une onde d'acclration stationnaireC La
localisation correspond A la transition entre un tat oZ la itesse de propa!ation des
ondes existe et un tat oZ elle est ima!inaireC +ar la suite7 T"omas R$;F$S7 (ill
R$;F#S et Mandel R$;FHS ont tendu les principes de cette approc"e dynamique aux
matriaux A comportement non linaireC -nsuite7 'ice R$;:FS7 'udnicIi et 'ice
R$;:9S7 (ill et (utc"inson R$;:9S s'y intressent par une approc"e quasi/statique et
tablissent les conditions ncessaires pour que ce p"nom4ne de localisation se
produiseC
'ice R$;:FS consid4re un milieu "omo!4ne in@ini non isqueuxC A ce milieu est
associe une solution @ondamentale d'quilibre7 base sur un c"amp "omo!4ne de
contrainte et de d@ormationC La t"orie de la bi@urcation consiste A introduire une
F Stabilit et bi@urcations rencontres en mcanique des sols $&:
solution alternatie caractrise par l'apparition d'une bande de localisation
Rbi@urcation en mode supposS7 pour une continuit r!uli4re du c"ar!ementC
L'quilibre de cette solution doit rpondre aux conditions de cinmatique et de
statique7 tout en respectant la loi de comportement du matriau7 tant A l'extrieur
qu'A l'intrieur de la bandeC Ces traaux permettent d'int!rer dans le cadre de la
mcanique des milieux continus les concepts de la localisation des d@ormationsC
<-:-, C!n*iti!n cinm&ti3e
Cette premi4re condition est lie au mode de d@ormation supposC -lle traduit la
discontinuit du c"amp de d@ormation entre le milieu A l'intrieur et A l'extrieur de
la bandeC La solution de base correspondant A la continuit du c"ar!ement a un
!radient de itesse not
7
0
C On consid4re une autre solution @aisant interenir
une bande localiseC T"omas R$;F$S a dmontr que la relation reliant le !radient
des incrments de d@ormation A l'intrieur et A l'extrieur de la bande s'crit de la
@a0on suiante Rc'est A dire conditions de compatibilit de MaxUellS :
7
1
=
7
0
+gn
RFC$;S
oZ
7
0
est le !radient de itesse de d@ormations A l'extrieur de la bande7
7
1
le
!radient de itesse de d@ormations A l'intrieur de la bande7 n le ecteur normal
A la bande Rdirection de polarisationS et g un ecteur quelconque7 indiquant le
@onctionnement de la bandeC
<-:-/ C!n*iti!n st&ti3e
La seconde condition caractrise la continuit du ecteur contraintes sur le @ront
port par la bande7 exprime en itesseC On consid4re
c
1
la itesse de contrainte
de Cauc"y7 par rapport A un rep4re @ixe7 A l'intrieur de la bande et
c
0
le mBme
tenseur d@ini A l'extrieur de la bandeC Le lon! du @ront entre le milieu "omo!4ne et
la bande7 on peut crire :
c
1
n= c
0
n
RFC#&S
C"ambon R#&&HaS prcise que cette relation n'est pas restreinte au domaine des
petites d@ormations7 mais peut Btre tendu A celui des !randes trans@ormationsC
<-:-4 L!i *e c!m0!rtement
La relation constitutie d'un matriau d@ini non isqueux relie la itesse de
contrainte au !radient de itesse de d@ormation7
7 C Cette relation est suppose
Btre alide aussi bien A l'intrieur qu'A l'extrieur de la bande de localisationC Si l'on
consid4re c la drie temporelle du tenseur de contrainte de Cauc"y par rapport
A un rep4re @ixe7 cette relation peut s'crire :
c=G (
7)
RFC#$S
oZ G une @onction tensorielle non linaire de tenseur dpendant de l'tatC
$&8 FC9 Jtude de la bi@urcation en bandes localises
<-:-9 C!n*iti!n 5nr&#e *e %i2rc&ti!n
-n int!rant la relation constitutie du matriau dans la condition cinmatique7 puis
dans la condition d'quilibre statique7 on obtient la relation qui d@init comme
possible l'existence d'un mode de d@ormation localis sous @orme de bande de
cisaillementC Gne bifurcation en bande est possible si il e9iste un 5ecteur normal
unitaire n et un 5ecteur g )uelcon)ue non nul tels )ue
|
G
ij
(
7
0
+gn)G
ij
(
7
0
)
n
j
=0 , \i
RFC##S
La relation FC## ne @ait pas de di@@rences entre l'intrieur et l'extrieur de la bande7
puisqu'en posant g ' =g 7 elle peut Btre rcrite A l'extrieur de la bande de la
@a0on suiante :
|
G
ij
(
7
1
+g' n) G
ij
(
7
1
)
n
j
=0 , \i
RFC#=S
5.5.4.1 Cas des lois linaires
2ans le cas d'tude de 'ice R$;:FS7 le mod4le de comportement local est considr
comme incrmental linaireC Cette "ypot"4se permet d'tablir une relation linaire
entre la drie temporelle du tenseur de contrainte de Cauc"y et le tenseur
!radient des itesses :
c
ij
=H
ijkl
7
kl RFC#HS
La condition de bi@urcation prend alors la @orme suiante :
n
0, g
0 tels 8ue ( H
ijkl
n
j
n
l
)g
k
=0 , \i
RFC#9S
Cette condition doit Btre satis@aite pour un ecteur g
0 C On en dduit alors :
det (9)=det
(
H
ijkl
n
l
n
j
)
=0
RFC#FS
Cette condition est souent appele condition de bi@urcation ou condition de
localisation R'ice7 $;:FSC Le crit4re de 'ice s'nonce @inalement comme suitC %a
bifurcation en bande de cisaillement est possible d$s )u'il e9iste un 5ecteur unitaire
n tel )ue et ( nHn) =0 .
'emarque $ : ,l @aut noter que l'"ypot"4se d'un comportement incrmental linaire
ne correspond pas aux mod4les les plus utiliss pour reprsenter le comportement
des !omatriauxC L'extension de ce crit4re A d'autres types de mod4les est
restreinteC
'emarque # : Le crit4re tabli est !alement appel crit4re d'ellipticit car7 dans le
F Stabilit et bi@urcations rencontres en mcanique des sols $&;
cadre d'une analyse linaire7 il correspond A la perte d'ellipticit du syst4me
d'quations aux dries partielles !ouernant l'quilibre localC ,l conduit aussi A la
perte d'"yperbolicit du probl4me dynamique associC
5.5.4.2 Cas des lois multilinaires
C"ambon R$;8FS a tabli7 dans un cadre tr4s !nral7 une condition ncessaire de
bi@urcation en bandes7 pour des mod4les de comportement applicables au
comportement des !omatriauxC Ces mod4les sont tablis A partir de lois multi/
linaires prsentes ci/dessousC
La relation linaire FC$# tablie au para!rap"e prcdent entre les taux de
contraintes et le !radient des itesses est diise en n relations linairesC C"aque
relation linaire est alable dans une 3one tensorielle7 reprsentant un cMne et
note 7
o
C La relation compl4te s'crit alors :
F7
o
= c = M
o
:
F
c
ij
= M
ijkl
o
:
F
kl
o0, ., n1
RFC#:S
Une condition supplmentaire de continuit est A a%outer A la relation FC#: pour une
itesse de d@ormation le lon! d'une @ronti4re entre deux domaines 7
o
et 7
ad%acents :
( M
ijkl
M
ijkl
o
)
F
kl
=0
RFC#8S
Cette condition est ncessaireC Sinon7 pour deux directions de c"ar!ement proc"es
d'une @ronti4re entre deux cMnes7 deux rponses radicalement distinctes pourraient
Btre obtenues RC"ambon R#&&HaSSC
La condition de bi@urcation pour des mod4les multilinaires s'exprime @inalement de
la @a0on suiante R'ice7 $;:F [ C"ambon7 #&&HaS :
N Si
7
0
est le cMne auquel appartient
F
0
et 7
o
celui de
F
0
+gn
7 on peut
crire A partir de la relation FC#= :
|( M
ijkl
o
M
ijkl
0
)
F
kl
0
+M
ijkl
o
g
k
n
l
n
j
=0 , \i
RFC#;S
C O
La condition de bi@urcation FC#; permet d'introduire ici les notions de bi@urcation
continue et discontinue au sens de 'ice R$;:FSC Une bi@urcation continue se d@init
par un tenseur constituti@ matriau identique dans la bande et A l'extrieur de la
bandeC A l'inerse7 une bi@urcation discontinue est tablie pour deux tenseurs
constituti@s di@@rents entre l'extrieur et l'intrieur de la bandeC
<-:-9-/-, A00#ic&ti!n & c&s %i#in&ire
'ice et 'udnicIi R$;8&S7 )orr et Maier R$;8;S pour des cas particuliers de mod4les
de comportement7 puis C"ambon et alC R#&&&S7 dans le cadre !nral des mod4les
lastoplastiques A simple potentiel plastique7 ont dmontr la condition ncessaire
et su@@isante pour l'apparition d'une bande de cisaillement :
$$& FC9 Jtude de la bi@urcation en bandes localises
N Gne bifurcation par bande est possible pour les matriau9 bilinaires si et
seulement si le dterminant du tenseur acousti)ue associ E une Ione linaire est
ngatif ou gal E Iro tandis )u'il est positif pour l'autre Ione @. Comme
"abituellement7 une des deux 3ones en dc"ar!e quiaut plus ou moins A de
l'lasticit indice $7 le crit4re de bi@urcation par bande deient :
et (M
ijkl
0
n
l
n
j
)<0
RFC=&S
Le crit4re de mode de bi@urcation discontinue7 qui correspond A la perte d'ellipticit
des quations7 est d@ini par l'apparition d'une aleur propre nulle du tenseur
acoustiqueC
'emarque $ : 2i@@rents auteurs ont traaill sur la dtermination des conditions de
localisation attac"es A des mod4les incrmentaux bilinaires tels que 'udnicIy et
'ice R$;:9S7 'unesson et alC R$;;$S7 Ottosen et 'unesson R$;;$a7 $;;$bS et )i!oni
et (uecIel R$;;$S7 A partir de la mt"ode des multiplicateurs de La!ran!eC 2'autres
auteurs comme )enallal et Comi R$;;FS7 +errin et Leblond R$;;=S et S3ab\ R$;;H7
$;;;S ont traaill sur ces mBmes questions7 mais en considrant une mt"ode
!omtrique de rsolutionC ,ls ont pu tablir des @ormulations explicites des modules
d'crouissa!e critique7 en @onction des mod4les de comportement considrs7 qui
correspondent A la perte d'ellipticit des quations et A l'existence possible des
modes de bi@urcations discontinuesC
'emarque # : +our des mod4les de comportement non associs7 le tenseur
constituti@ tan!ent et le tenseur acoustique ne sont pas symtriquesC 2ans ce cas7
les parties relles des aleurs propres du tenseur acoustique sont bornes par les
aleurs propres minimale et maximale du tenseur acoustique symtrisC La perte de
d@inie positiit du tenseur acoustique symtris apparaQtra aant la perte
d'ellipticit des quationsC Ce p"nom4ne correspond A la perte d'ellipticit @orte et il
a t analys par )i!oni et (uecIel R$;;$S7 )i!oni et .accaria R$;;#a7 $;;#bS7
*eilsen et Sc"reyer R$;;=S7 'i33y et alC R$;;FS et S3ab\ R$;;:S Rcit par S3ab\7
$;;;SC La condition reposant sur le crit4re d'ellipticit @orte sera tou%ours atteinte
aant le crit4re de bi@urcation discontinueC -lle est donc une condition ncessaire A
ce mode de bi@urcationC La perte d'ellipticit @orte peut conduire !alement A des
modes de bi@urcation di@@usC
'emarque = : Truesdell et *oll R$;F9S Rcit par )i!oni et +etryI7 #&&#S ont montr
que la propa!ation des ondes planes dans le milieu dpend des aleurs propres du
tenseur acoustique 9 C Les ondes se propa!ent dans le milieu pour des aleurs
propres relles positiesC L'apparition de aleurs propres n!aties ou complexes
est relie respectiement A des perturbations dier!entes ou de @lottementC Les
instabilits de @lottement sont relies A l'au!mentation des oscillations de
perturbations priodiques dans un milieu "omo!4ne in@ini R'ice7 $;:: cit par )i!oni
et +etryI7 #&&#SC
'emarque H : Le crit4re de bi@urcation tablit en FC=& int4!re toutes les directions
n conduisant A des aleurs n!aties ou nulles du crit4reC On construit ainsi
F Stabilit et bi@urcations rencontres en mcanique des sols $$$
l'interalle des orientations possibles de bandes de cisaillement RC"ambon et
Moullet7 #&&HSC
<-:-9-/-/ C&s 5nr&#
Le t"or4me tabli dans le cas d'un mod4le bilinaire n'est pas transposable au cas
!nral des mod4les multilinairesC ,l est di@@icile d'tablir la condition ncessaire de
bi@urcation par bandes pour ce type de mod4lesC
C"ambon R$;8FS a nanmoins tabli le t"or4me suiant pour les lois
multilinaires :
N Au cours d'un c"ar!ement monotone correspondant A une au!mentation du
scalaire \ 7 il existe une aleur critique minimum7
\
c
7 marquant l'initiation d'une
bi@urcation par bandes7 qui correspond A une solution non triiale
F
0
+gn
C
Cette aleur est telle que cette solution appartienne A une @ronti4re de 3one ou bien
que g ait des composantes A aleur in@inieC O
Ce t"or4me a permis pour des lois lasto/plastiques A simple potentiel de retrouer
les rsultats antrieurs tablis par 'ice et 'udnicIi R$;8&S et )orr et Maier R$;8;S
Roir expression du t"or4me ci/dessusSC -n reanc"e7 ce t"or4me n'a pas encore
t appliqu A des mod4les multilinairesC
'emarque $ : Lorsque le crit4re de 'ice s'a4re ri@i pour une direction de bande
n 7 alors la condition d'unicit n'est plus alable A l'intrieur de la bande R*icot7
#&&8 cit par +runier7 #&&8S :
et
(
H
ijkl
n
j
n
l
)
=0, a4ec n0
=
g0,
(
H
ijkl
n
j
n
l
)
g
k
=0 , \i
=
g
i
( H
ijkl
n
j
n
l
) g
k
=0 , \i
RFC=$S
Or7 en supposant un mode de d@ormation polaris non nul du type
c=
1
2
( gn+ng ) Rd@ini symtriqueS :
c
ij
H
ijkl
c
kl
=
1
4
(
g
i
n
j
+n
i
g
j
)
H
ijkl
(
g
k
n
l
+n
l
g
k
)
=g
i
n
j
H
ijkl
n
l
g
k RFC=#S
La relation prcdente est tablie !rEce aux symtries mineures de la matrice
constitutieC 2ans la bande de localisation7 le traail du second ordre s'crit
explicitement :
et
(
H
ijkl
n
j
n
l
)
=0 = c
ij
H
ijkl
c
kl
= c
ij
c
ij
=0
RFC==S
$$# FCF Conclusion sur les crit4res de stabilit
<-< C!nc#si!n sr #es crit+res *e st&%i#it
2ans les sections prcdentes7 trois conditions de bi@urcation ont t prsentes
pour les matriaux lasto/plastiquesC
Le premier point A si!naler porte sur la ncessit de ne plus prendre en compte le
crit4re limite de plasticit comme crit4re limite de stabilit7 puisqu'il est incapable de
dtecter des modes de rupture di@@use qui peuent se dclenc"er A l'intrieur strict
du crit4re limite de plasticit pour un matriau non associC
Le second point abord est en rapport aec la perte de positiit du traail du
second ordre7 qui peut se produire en p"ase d'crouissa!e positi@ du matriau7 soit
aant la possible p"ase de radoucissement du matriauC
Le troisi4me point A releer de cette analyse stipule que la bi@urcation en bandes ne
peut Btre antrieure au passa!e du traail de second ordre des aleurs posities
aux aleurs n!atiesC Cette bi@urcation sera au mieux7 pour les mod4les lasto/
plastiques associs7 simultane A la perte de positiit du traail de second ordreC
Le crit4re de (ill constitue en soit une borne in@rieure des crit4res de localisation7
qui ne peuent dtecter que le mode suppos de bi@urcations en bandesC
Les points ma%eurs cits ci/dessus peuent Btre reprsents par un dia!ramme
!lobal portant sur les aleurs des modules de plasticit critiques FC$8C -n reanc"e7
il n'existe pas de conditions particuli4res sur le si!ne de ces modules de plasticit
critiqueC
<-C Micr!strctre et #!c&#is&ti!n
<-C-, C7&n5ement *8c7e##e
Le p"nom4ne de localisation des d@ormations u comme une bi@urcation des
quations d'quilibre est tabli dans le cadre !nral de la mcanique des milieux
continusC La mcanique des milieux continus repose sur l'"ypot"4se d'un
comportement macroscopique "omo!4ne du milieu !ranulaire A l'c"elle d'un
1olume Jlmentaire 'eprsentati@ R1-'SC Les mod4les de comportement associs
A cette approc"e Roir Y#C9 S sont alors d@inis comme p"nomnolo!iques7
@ormulant directement les p"nom4nes obsers dans le @ormalisme mat"matique
appropriC *anmoins7 A l'c"elle plus @ine des !rains7 les d@ormations inlastiques
Illustration B.1 : +rit$res de localisation en fonction des modules de plasticit criti)ue
(Jesson et al. 2!!1)
F Stabilit et bi@urcations rencontres en mcanique des sols $$=
constates au cours de l'"istoire de c"ar!ement sont le rsultat de mouements
relati@s inter/!ranulaires7 loin d'Btre "omo!4nes A l'c"elle du 1-'C Ces
mouements relati@s du type !lissement inter!ranulaire7 rotation ou mBme
crasement de !rains7 produisent en dessous d'une c"elle de lon!ueur ou de taille
des d@ormations discontinuesC Cette c"elle est en !nrale nomme c"elle
microscopiqueC ,l existe dans la littrature d'autres mt"odes telles que des
approc"es multi/c"elles permettant de construire le comportement macroscopique
du matriau A partir d'une description locale du milieuC Ces approc"es peuent alors
utiliser des tec"niques d'"omo!nisation ou encore des mt"odes numriques
bases sur les lments discrets Roir *icot et 2are R#&&9S pour des r@rences sur
ces su%ets de rec"erc"eS C
+our une structure7 dont la taille est !rande par rapport A l'c"elle des !rains7 un
c"ar!ement "omo!4ne en!endre des d@ormations plastiquesC -lles peuent Btre
considres comme "omo!4nes A l'c"elle macroscopique tant que le seuil critique
de localisation des d@ormations n'est pas atteintC Ce seuil critique correspond A
l'initiation de la localisation des d@ormations A l'c"elle macroscopique7 p"nom4ne
retrou dans l'approc"e t"orique expose ci/dessus RYFC9 SC La localisation des
d@ormations en bandes de cisaillement se concentre sur une lar!eur de bande
@aible7 aleur proc"e de la taille caractristique de la microstructure du !omatriauC
Ce p"nom4ne a t lar!ement obser exprimentalement7 releant notamment
que la lar!eur de la bande de cisaillement est @onction de la taille des particules du
milieu !ranulaire R'oscoe R$;:&S7 1ardoulaIis R$;:HS7 1ardoulaIis et alC R$;:8S7
Mu"l"aus et 1ardoulaIis R$;8:S cit par *icot et 2are R#&&9SS et de leur @orme
R2esrues et 1i!!iani R#&&HSSC
24s l'initiation de la localisation des d@ormations en bandes de cisaillement7
d'importantes d@ormations inlastiques se concentrent A l'intrieur de la bande7
alors que les 3ones de matriau comprises entre les bandes de cisaillement se
d@orment tr4s peu R2esrues et 1i!!iani R#&&HS7 (all et alC R#&$&SSC Le
comportement de l'c"antillon A l'c"elle macroscopique est alors !ouern par le
comportement adoucissant du matriau A l'intrieur de la bandeC Les p"nom4nes
micro/mcaniques locaux %ouent alors un rMle prpondrant dans la rponse
macroscopique de la structureC
Illustration B.2 : Cssai bia9ial de compression sur sable (/ls-ibli et al. 2!!')
$$H FC: Microstructure et localisation
<-C-/ Limite *es mi#ie. c!ntins c#&ssi3es
5.6.2.1 paisseur de 3andes de cisaillement indtermine
Un milieu continu "omo!nis peut uniquement reproduire le comportement
macroscopique du matriauC Cette limitation de la t"orie classique des milieux
continus apparaQt lorsque les quations !ouernant le probl4me d'olution tudi
perdent leur caract4re elliptique R)enallal et alC7 $;8;S7 c'est A dire aec l'initiation de
solutions alternaties en!endrant une localisation des d@ormations en bandes de
cisaillementC Apr4s ce point critique de perte d'ellipticit des quations7 il est
commun d'employer le terme N r!ime de post/localisation O pour dsi!ner le
comportement de la structureC Les tudes d'instabilits !nrant une localisation
des d@ormations prsentes dans le para!rap"e YFC9 permettent d'tablir
l'interalle des an!les d'inclinaison de ces bandes de cisaillement dans le milieu et
les modules d'crouissa!e critiques propres aux di@@rents mod4les constituti@s
locaux R'emarque $ du YFC9CHC# SC -n reanc"e7 les mod4les lasto/plastiques
utiliss ne permettent pas de dcrire l'olution du syst4me mcanique au delA de
l'initiationC Les quations !ouernant l'quilibre sous @orme incrmentale ne
contiennent pas de param4tre intrins4que ayant la dimension d'une lon!ueurC
L'absence de cette !randeur dans les mod4les constituti@s conduit A l'incapacit
d'tablir la taille de la lar!eur de bandes de cisaillementC Cette aleur reste
indtermine7 ce qui conduit A l'impossibilit de dcrire aec la t"orie classique des
milieux continus le r!ime de post/localisation R)enallal et alC7 $;887 $;8;SC
5.6.2.2 4pendance des rsultats numriques au mailla0e
La modlisation par la mt"ode des lments @inis modi@ie le probl4me pos sur
l'incapacit A d@inir la taille des 3ones de localisationC L'approc"e par lments @inis
classique impose que les c"amps de dplacement et de d@ormation restent
continus au sein de c"aque lmentC Les discontinuits des c"amps de
d@ormations sont alors repousses aux @ronti4res des lmentsC Une lon!ueur
caractristique apparaQt alors naturellement lors de l'approximation lments @inis :
la taille des lmentsC ,l est alors possible de poursuire un calcul en r!ime de
post/localisation oZ les d@ormations sont alors con@ines au sein d'un !roupe limit
d'lmentsC La dissipation est !alement restreinte A ce !roupe d'lments et reste
borneC Lorsqu'un ra@@inement de mailla!e est enisa!7 la 3one de localisation
diminue aec la taille des lments [ la dissipation est alors con@ine dans un
olume tendant ers 3ro7 ce qui conduit A une aleur limite !ale A 3ro pour la
dissipationC Une structure peut alors7 si la taille de ses lments tend ers 3ro7
atteindre sa ruine sans dissiper d'ner!ie R*eedleman et Ter!aard7 $;8H [ )afant7
$;8F [ Armero et GariIipati7 $;;9 [ cits par 1ossou!"i #&&$SC
F Stabilit et bi@urcations rencontres en mcanique des sols $$9
La dpendance pat"olo!ique de la solution A la discrtisation spatiale est
directement lie A l'absence de lon!ueur interne dans les mod4les continus locaux
classiquesC L'ide consiste A proposer des approc"es permettant de d@inir un
probl4me aux limites bien pos dans le r!ime de post/localisationC Les approc"es
enisa!es deront @aire interenir une lon!ueur caractristique in@luen0ant la
rpartition spatiale de la densit de dissipation olumique7 donc contrMlant la
dpendance de la solution du probl4me discret A la taille des mailles des lments
@inisC +our d@inir les di@@rentes approc"es exposes dans le proc"ain para!rap"e7
il est commun de parler de mt"odes N limiteurs de localisation OC
<-E Mt7!*es *e r5#&ris&ti!n
Les di@@icults associes aux mod4les de comportement adoucissants sont
directement lies A un c"an!ement de nature des quations du probl4me : perte
d'ellipticit pour une analyse quasi/statique7 perte d'"yperbolicit pour une analyse
dynamiqueC 2ans le but de caractriser le probl4me de localisation des
d@ormations et poursuire les tudes dans le domaine de la post/localisation7 de
nombreux auteurs ont delopp des solutions alternaties7 plus ou moins
p"ysiques7 A l'approc"e classique des milieux continus !nrant des probl4mes
numriques de sensibilit au mailla!eC Les mt"odes enisa!es se distin!uent
suiant deux oies d'approc"eC La premi4re consiste A interenir au nieau du
mod4le numrique et la seconde interient d4s l'criture du mod4le continu de @a0on
A limiter les solutions A un nombre @iniC
<-E-, M!*+#es *isc!ntins
Une premi4re oie d'approc"e permet d'introduire une cinmatique discontinue au
sein mBme de la discrtisation par lments @inisC -lle se %usti@ie par le @ait que la
perte d'"yperbolicit Rprobl4me dynamiqueS entraQne l'apparition d'une discontinuit
stationnaire7 @ront sur lequel les contraintes ont un taux discontinu7 c, n
0 C On
retroue notamment sous ce label deux types d'approc"es par lments @inis :
Illustration B.' : Cffet pat-ologi)ue de dpendance au maillage des rsultats (JirKse, 2!!&)
P P
L
$$F FC8 Mt"odes de r!ularisation
les lments d'inter@ace7 encore connus sous le nom de mod4les co"si@sC
Ces mod4les sont construits sur l'ide d'associer une @orce d'interaction
co"sie A un saut de dplacement !nr par l'cartement des l4res d'une
@issureC Cette @orce d'interaction contrMle une 3one de transition oZ
l'cartement des l4res de la @issure olue pro!ressiement Rpour plus de
dtails7 oir les traaux de Laerne R#&&HS par exempleSC
des mod4les d'inter@ace pour la modlisation du contact sol !ranulaire/
structure ont t deloppsC La 3one de localisation des d@ormations est
considre comme une 3one de contact ou d'inter@ace entre deux solidesC Le
milieu intrieur A la bande de cisaillement a un mod4le de comportement
distinct de celui extrieur A la bandeC 2es conditions de continuit en
dplacements et contraintes sont a%outes pour assurer l'quilibreC C"ambon
et Croc"epeyre R$;;8S ont delopp le mod4le d'inter@ace 2ap"nisC Le
mod4le 2ap"nis est exprim en !rande trans@ormationC ,l est construit de
telle sorte A assurer une transition consistante entre le mod4le extrieur A la
bande Rmod4le Clo-7 C"ambon et alC7 $;;HS et le mod4le A l'intrieur de la
bande 2ap"nis A la @ronti4re de la bandeC Le mod4le 2ap"nis introduit un
comportement adoucissant dans la bande de localisation traduisant une
d!radation des proprits mcaniques dans cette 3one7 en particulier une
diminution de la densit du matriauC Le mod4le 2ap"nis est bas sur la
notion d'indice des ides critiqueC
les lments A sur@ace de discontinuit interne7 oZ l'apparition de sur@aces
de discontinuit du c"amp de d@ormation ou du c"amp de dplacement est
permise par l'enric"issement de la cinmatique du milieu continuC
Les mod4les A discontinuit @aible ont t introduits initialement par
+ietrus3acI et Mr\3 R$;8$S7 puis Orti3 et alC R$;8:S Rcit par )ranc"erie7
#&&=S et Leroy et alC R$;8:SC Ces traaux sont ensuite repris pour une
extension aux lments A quatre nbuds R)elytsc"Io et alC7 $;88 [
5lisinsIi et alC7 $;;$SC Les lments @inis delopps dans ce cadre
autorisent l'apparition de discontinuits du c"amp de d@ormation A
l'intrieur des lmentsC
La mt"ode deloppe par Orti3 et alC R$;8:S est base sur une
tude de localisation au sein de c"aque lmentC Lorsqu'un mode de
localisation est dtect7 la base des @onctions de @orme de l'lment
est enric"ie7 autorisant une discontinuit de dplacement au sein de
l'lmentC Les de!rs de libert supplmentaires introduits7 tant
propres A c"aque lment7 sont limins au nieau !lobal du calcul
par condensation statique lmentaireC Cette mt"ode prsente
nanmoins l'inconnient de ne tolrer qu'une sur@ace de
discontinuit par lment7 ce qui rend @inalement dpendantes les
rponses A la taille des lmentsC
Les traaux de )elytsc"Io R)elytsc"Io et alC7 $;88S sont bass sur
l'introduction d'une bande de localisation au sein d'un lmentC La
lar!eur des bandes de localisation est donne et doit rester in@rieure
A la taille des lments7 imposant donc une taille minimale pour les
lmentsC Sluys R$;;:S a dmontr pour ces mod4les l'indpendance
des solutions A la taille des mailles7 mais une dpendance A
l'orientation des mailles persisteC
Les mod4les A discontinuit @orte introduisent une discontinuit du
F Stabilit et bi@urcations rencontres en mcanique des sols $$:
c"amp de dplacement7 conduisant A un c"amp de d@ormation sin!ulier
au sein de l'lmentC Les premiers traaux sur ce su%et ont t mens
par 2orIin et alC R$;;&S7 5lisinsIi et alC R$;;$S Rcits par )ranc"erie
R#&&=SS7 Larrson et alC R$;;=S7 Simo et alC R$;;=S7 Armero et GariIipati
R$;;9S7 'e!ueiro et alC R$;;8S Rcit par 1ossou!"i7 #&&$SC ?ircseI R#&&&S
propose notamment une reue des tec"niques numriques mises en
place pour traiter la discontinuit du c"amp de dplacementC La
r!ularisation des quations est alors assure par une lon!ueur
caractristique nulleC L'ner!ie dissipe est donc concentre dans des
bandes de localisation A paisseur nulleC L'ob%ecti@ n'est plus de dcrire
@inement les bandes de localisation7 mais simplement de prendre en
compte leurs e@@ets sur la rponse !lobale de la structureC
Les approc"es discontinues ne c"erc"ent pas A dcrire @inement le comportement
micromcanique des 3ones de localisation et notamment les d@ormations
olumiques relees exprimentalement dans ces 3ones de !lissement R1ardoulaIis
et Sulem7 $;;9SC La ariation olumique doit %ouer un rMle dans les probl4mes de
coupla!e "ydromcanique Rc"emin pr@rentiel d'coulementSC ,l apparaQt donc
ncessaire d'en modliser @inement le comportementC Cette remarque permet
d'introduire la deuxi4me oie d'approc"e pour r!ulariser les probl4mes de
localisationC
<-E-/ M!*+#es c!ntins
La seconde oie d'approc"e pour traiter les probl4mes lis A la localisation des
d@ormations est base sur une criture enric"ie du mod4le continu7 introduisant
une dpendance explicite en temps ou en espace du comportement local du
matriauC Les termes complmentaires A l'approc"e classique conduisent A
introduire un certain nombre de coe@@icients7 qu'on peut rendre "omo!4nes A des
lon!ueurs : ce sont des lon!ueurs dites internes7 ou caractristiques du matriauC
Les sections suiantes prsentent des exemples de traaux de rec"erc"e orients
selon ce conceptC
5.'.2.1 Modles 1iscoplastiques
L'utilisation de matriau aec un comportement dpendant explicitement du temps
Rrate dependentS assure au probl4me quasi/statique de ne pas perdre son ellipticit
lors du p"nom4ne de localisation des d@ormationsC Ces comportements
permettent !alement de maintenir les ondes dont les clrits sont dans le
domaine des aleurs relles pour des sollicitations dynamiquesC La localisation des
d@ormations en bandes de cisaillement est alors interprte comme un p"nom4ne
issu de la dynamiqueC Cette mt"ode rsout le probl4me de dpendance aux
mailla!es des rsultats en introduisant une lon!ueur caractristique mBme si
l'criture constitutie du mod4le n'en contient pasC La dpendance en temps du
mod4le est introduite ia un param4tre de iscositC Cette approc"e a t
deloppe dans le cadre des matriaux lastoplastiques par *eedleman R$;88SC
2e )orst et alC R$;;=S Rcits par Fernandes7 #&&;aS montrent d'ailleurs que cette
approc"e7 dans le cadre des sollicitations dynamiques7 est une des mt"odes les
plus per@ormantes pour assurer une indpendance des rsultats au mailla!eC
Les di@@icults lies A ce mod4le rel4ent du c"oix du param4tre de iscosit7 qui ne
reprsente pas a priori une proprit du matriau7 mais plutMt un param4tre
$$8 FC8 Mt"odes de r!ularisation
numrique de r!ularisationC L'application de cette mt"ode aux c"ar!ements
quasi/statiques n'est pas des plus aises7 puisqu'il est ncessaire de considrer le
temps comme un param4tre p"ysiqueC 2e plus7 d'apr4s Forest et Lorent3 R#&&HS7
cette mt"ode ne permet pas d'assurer une indpendance des rsultats A
l'orientation des mailles7 comme montre pour la simulation d'une plaque troueC
2e plus7 des probl4mes lis A la rsolution numrique subsistent et arient selon les
sc"mas d'int!ration en tempsC Lorent3 R$;;FS en donne notamment des exemples
lis A des conditions de @inesse de discrtisation en temps ou en espace selon les
sc"masC Les sc"mas totalement explicites ncessitent une !rande @inesse en
temps et en espace R+itman7 $;;9SC Les sc"mas totalement implicites imposent7
pour !arder le caract4re "yperbolique des quations d'quilibre incrmentales7 un
pas de temps in@rieur A une aleur critique RSimo7 $;88SC -n@in7 pour les mod4les
de comportement int!rs analytiquement7 des conditions de stabilit apparaissent
!alement portant sur la @inesse du mailla!e RLoret et +rost7 $;;& [ +rost et
Loret7 $;;&SC
5.'.2.2 Modles dpendant en espace
Les mod4les dpendant en espace correspondent A une approc"e continue
enric"ieC Les quations constituties7 appliques en tout point du domaine7 sont
modi@ies par l'a%out d'un param4tre de lon!ueur interneC Les mod4les cits dans
cette section sont les mod4les A ariables r!ularises7 les mod4les A !radient de
ariables internes et les milieux continus enric"is en !radient de d@ormationsC
<-E-/-/-, M!*+#es = ;&ri&%#es r5#&rises
Les approc"es relaties A ce concept consid4rent la rponse d'un point du milieu
comme dpendante de la rponse des points oisinsC Cette dpendance est
introduite sur les ariables lies A l'olution plastique du matriau7 telles que le
c"amp de d@ormation ou des ariables internes des mod4les constituti@sC La
ariable locale considre est alors remplace par sa aleur N enric"ie O au sein de
la loi de comportement du milieu7 au sein de la loi d'olution pour des ariables
internes7 ou encore dans l'ner!ie potentielle elle/mBmeC La aleur N enric"ie O d'un
c"amp r!ularis est tablie en prenant en compte les aleurs du c"amp considr
con@in A une 3one d'in@luence spatiale autour du point matriel considrC
L'oprateur de dlocalisation peut interenir sous di@@rentes @ormes7 telles qu'une
int!rale ou A traers l'introduction de !radients d'ordre suprieur7 dont les
contributions ner!tiques @inies ont contrMler les localisations des c"amps de
ariablesC
M!*+#es n!n #!c&.
Les mod4les non locaux ont t appliqus initialement au milieu continu dans les
annes $;F& par di@@rents auteurs tels que 5rgner R$;F8S7 5unin R$;F8S7 5rum"ansl
R$;F8S7 -rin!en et -delen R$;:#S7 cits par +i%audier/Cabot et )afant R$;8:SC L'ide
premi4re de l'approc"e non locale a consist A considrer un tat de contraintes en
un point comme @onction de l'tat de d@ormations d'un olume d'in@luence autour du
point considr7 par le biais d'un terme int!ralC La lon!ueur caractristique
introduite ia ce olume d'in@luence tait alors interprte comme un param4tre
matriau reliant la microstructure au milieu continuC ,l subsistait nanmoins deux
inconnients A ces premiers mod4les :
Le mod4le non local s'applique pour toutes les situations de c"ar!ement :
F Stabilit et bi@urcations rencontres en mcanique des sols $$;
lastique7 c"ar!e et dc"ar!e lastoplastiqueC
2es modes de dissipation d'ner!ie !ale A 3ro apparaissent et nuisent A
la coner!ence des calculsC
+i%audier/Cabot et )afant R$;8:S appliquent l'approc"e non locale aux mod4les
d'endomma!ement en r!ularisant cette @ois uniquement la ariable
d'endomma!ement du mod4leC La partie lastique du comportement est ainsi
spare des considrations non localesC L'application de l'approc"e non locale
uniquement sur un ou plusieurs param4tres lis A la localisation des d@ormations a
l'aanta!e de maintenir l'tat de contraintes solutions des quations di@@rentielles
standardC Ces quations di@@rentielles sont responsables de l'quilibre et des
conditions aux limites standard appliques aux @ronti4res du domaine d'tudeC
-n notant f ( ,) un c"amp de ariables locales du mod4le sur le domaine D 7 le
c"amp de ariables non locales associ
f ( ,) est obtenu ia l'expression :
f ( ,)=
|
D
o( , , s) f ( s) s
RFC=HS
oZ o( , , s) est une @onction de pondration dpendant du point considrC
+our les applications aux mod4les adoucissants7 il est souent requis d'utiliser une
@onction de pondration normalise pour ne pas altrer les c"amps solutions
uni@ormeC
La plupart des mod4les non locaux consid4re cette @onction de pondration comme
une !aussienne :
o( , , s)=exp
(
,s
2
2l
c
2
)
RFC=9S
Le param4tre l
c
correspond A la lon!ueur caractristique du mod4le non/localC
*anmoins7 pour tenir compte de l'anisotropie d'un matriau cre par
l'endomma!ement 7 certains auteurs R)afant R$;;HS7 +lanas et alC R$;;HS7 cits par
Strgmber! et 'istinmaa7 $;;FS proposent d'utiliser des @onctions de pondration
priil!iant une direction de l'espace et non des @onctions olumes isotropesC Le
c"oix de la @onction de pondration %oue un rMle important sur la rponse du mod4le
et reste un point dlicat de cette tec"niqueC
Strgmber! et 'istinmaa R$;;FS utilisent !alement une approc"e non locale pour le
mod4le de comportement lastoplastique aec crouissa!e et seuil de 1on Mises7
mais uniquement pour les r!imes plastiques adoucissantsC Le param4tre
d'crouissa!e isotrope du mod4le est d@ini par une @ormulation mixte locale<non
locale en @onction du r!ime de plasticitC
Une autre oie d'extension de cette approc"e a t mene par Comi R#&&$S qui a
introduit des lon!ueurs caractristiques di@@rentes selon le type de c"ar!ement :
compression ou tractionC
)afant et ?ircseI R#&&#S proposent une reue dtaille des di@@rents traaux de
rec"erc"e mens dans le cadre des mod4les non locaux A @ormulation int!raleC
La mise en place de cette mt"ode dans un lo!iciel par lments @inis ne semble
pas aise7 mBme si les quations d'quilibre restent classiquesC L'estimation de
l'tat de contraintes et du comportement tan!ent en un point d'int!ration dpend
des autres points d'int!ration7 ce qui pose un probl4me pour l'arc"itecture de la
$#& FC8 Mt"odes de r!ularisation
plupart des lo!iciels d'lments @inisC
M!*+#es = 5r&*ient
Les mod4les non locaux A !radient interiennent dans la @ormulation du mod4le
constituti@ du matriau7 plus exactement au nieau de la @onction seuil par
l'introduction du Laplacien d'une ariable d'crouissa!e du mod4leC 2ans la
pratique7 ces mod4les @ont appel A la rsolution d'une quation di@@rentielle
supplmentaire R+eerlin!s et alC7 #&&$SC On distin!ue pour ce type d'approc"e les
mod4les A @ormulation explicite et les mod4les A @ormulation impliciteC
M!*+#es = 2!rm#&ti!n e.0#icite
Ces mod4les sont bass sur l'criture d'un deloppement en srie de Taylor d'un
c"amp local A r!ulariser autour du point matrielC L'expression de l'quation A
dries partielles A rsoudre prend la @orme suiante7 aec
\
2
l'oprateur
Laplacien :
f ( ,)= f ( ,)+l
c
2
\
2
f ( ,)
RFC=FS
Ces mod4les ont t initialement appliqus au comportement matriau
lastoplastique A crouissa!e n!ati@7 notamment par Me"l"aus et Ai@antis R$;;$S7
2e )orst et Me"l"aus R$;;#S et Sluys et alC R$;;=SC La sur@ace de c"ar!e du mod4le
ne dpend plus seulement de la plasticit cumule mais !alement de son
LaplacienC L'quation de consistance du mod4le aboutit alors A une quation aux
dries partielles en espace au lieu d'une quation al!briqueC ,l est ncessaire
d'introduire des conditions aux limites supplmentaires sur le multiplicateur
plastiqueC Ces conditions aux limites sont di@@iciles A tablir7 car exprimes aux
@ronti4res de la 3one de localisation a priori non dterminesC Cette approc"e a
ensuite t tendue aux mod4les d'endomma!ement par +eerlin!s et alC R$;;FS et
AsIes et Sluys R#&&#SC
Une premi4re limitation de ce type de mod4les impose au c"amp local d'Btre
su@@isamment r!ulier pour assurer la coner!ence de la srie de Taylor Rncessit
d'utiliser des @onctions de @orme C
$
SC 2e plus7 la drie seconde introduite porte
uniquement sur le c"amp local qui produit une interaction spatiale A une distance
in@initsimale R+eerlin!s et alC R#&&$SSC Le caract4re non local de ce mod4le peut
Btre conser sous cette @ormulation7 si le deloppement de la srie de Taylor
appliqu au c"amp local n'est pas tronqu R+eerlin!s et alC R#&&$SSC
AsIes et Sluys R#&&#S ont !alement traaill sur une @ormulation explicite au H4me
ordreC ,ls constatent l'apparition d'instabilits dans les domaines d'crouissa!e
positi@ et n!ati@C ,ls mettent !alement en aant un c"an!ement qualitati@ et
quantitati@ de la rponse entre les @ormulations explicites du #4me et H4me ordre
RAsIes et alC7 #&&&SC
M!*+#es = 2!rm#&ti!n im0#icite
Le principe de ces mod4les7 delopps dans le cadre des mod4les
d'endomma!ement R+eerlin!s et alC7 $;;FS7 n'est plus de calculer le c"amp non local
A partir du c"amp local et de ses dries7 mais d'imposer au c"amp non local
d'Btre solution d'une quation di@@rentielle d'ordre #C Cette quation est tablie A
partir de la @ormulation explicite RqCFC=FS en la driant deux @ois et en l'introduisant
F Stabilit et bi@urcations rencontres en mcanique des sols $#$
dans le deloppement en srie de Taylor de la ariable locale7 limite A l'ordre #C
2es conditions aux limites supplmentaires doient Btre a%outes pour assurer
l'unicit de la solution :
f ( ,)l
c
2
\
2
f ( ,)= f ( ,) +ns D
f
n
=0 s'r D
RFC=:S
L'utilisation de cette mt"ode assure un caract4re non local7 puisque les !radients
d'ordre suprieurs au c"amp local sont implicitement contenus dans le !radient du
c"amp non local R+eerlin!s et alC7 #&&$SC Ces mod4les sont proc"es des mod4les
non locaux A @ormulation int!rale pour une @onction de pondration o !ale A la
@onction de Green7 solution de cette quation aux dries partielles pour une
distribution de 2iracC
AsIes et Sluys R#&&#S ralisent !alement une tude comparatie sur les
@ormulations implicites A !radient non local A l'ordre # et l'ordre HC Leurs rsultats
montrent que la prise en compte de !radient d'ordre suprieur modi@ie
quantitatiement la rponse7 qui tend ers la solution obtenue aec une approc"e
int!rale non localeC ,ls rel4ent !alement une lar!eur de la bande tendant ers
3ro7 lorsque l'endomma!ement du matriau atteint son nieau maximumC Le
c"eminement ers une modlisation discr4te de la 3one d'endomma!ement en est
alors plus que l!itimeC
Godard R#&&9S propose une extension du mod4le de +eerlin!s et alC R$;;FS A tous
les mod4les de comportement d'endomma!ement exprims dans l'espace des
d@ormationsC L'ide consiste A r!ulariser toutes les composantes du tenseur de
d@ormations et non plus seulement un c"amp scalaire Rd@ormation quialenteSC
<-E-/-/-/ M!*+#es = 5r&*ient *e ;&ri&%#es internes
Andrieux et alC R$;;FS proposent7 dans le cadre des mod4les d'endomma!ement7
une approc"e consistant A introduire dans l'ner!ie libre des termes en d@ormation7
en endomma!ement et en !radient de l'endomma!ementC ,ls introduisent une loi
p"nomnolo!ique A l'c"elle microscopique et passent A l'c"elle macroscopique
ia une tape d'"omo!nisationC Cette tec"nique permet de dterminer un mod4le
de comportement "omo!nis A l'c"elle macroscopique7 dpendant de
caractristiques mcaniques A l'c"elle microscopiqueC Lorent3 R$;;;S montre que
le second principe de la t"ermodynamique exprim A l'c"elle de la structure est
bien ri@i dans le cadre de cette approc"eC L'application numrique de ce mod4le
a t ralise par Lorent3 et )enallal R#&&9S qui proposent un al!orit"me du type
U3aUa robuste mais lent et di@@icile A implanter dans un code par lments @inisC
Lorent3 R#&&8S propose par la suite un autre al!orit"me prserant l'arc"itecture
initiale d'un code de calcul par lments @inis et !arantissant un temps de calcul
acceptableC Les rsultats obtenus montrent une indpendance au mailla!e en
espace et en orientation pour des tra%ets de c"ar!ement complexes7 !nrant des
c"emins d'endomma!ement non d@inis a prioriC
<-E-/-/-4 Mi#ie. c!ntins micr!m!r07i3es
Les e@@ets du comportement de la microstructure des matriaux peuent !alement
Btre traits ia une extension des milieux continus !nralissC Cette t"orie a t
$## FC8 Mt"odes de r!ularisation
deloppe initialement par Toupin R$;F#S et Mindlin R$;FH7 $;F9S dans le cadre de
l'lasticit linaire puis !nralise par Germain R$;:=aSC L'criture des milieux
micromorp"iques consiste A enric"ir la cinmatique du milieu par l'a%out d'un tenseur
du second ordre7 qui modlise les d@ormations et les rotations de la microstructure
du milieu tudiC C"ambon et alC R#&&$S ont constitu une @ormulation !nrale de
cette t"orie dans le cadre de l'lasto/plasticit en petites d@ormationsC
Ce tenseur du second ordre7 de composantes notes
f
ij
7 est appel !radient
cinmatique microscopique et est non/symtriqueC Ce c"amp n'est pas reli au
!radient de dplacement '
i
7 qui est considr propre A l'c"elle macroscopiqueC
Ce tenseur peut Btre dcompos en une partie antisymtrique et une partie
symtriqueC Le c"amp associ A la partie antisymtrique s'apparente aux micro/
rotations du milieu7 r
ij
7 et le c"amp de la partie symtrique aux micro/
d@ormations pures7
ij
C Le c"amp des micro/d@ormations pures peut !alement
Btre dcompos A son tour en une partie "ydrostatique7 X 7 et une partie
diatorique7
ij
ev
C ,l est de plus ncessaire d'introduire le !radient des
d@ormations microscopiques7 de composantes h
ijk
C
r
ij
=
1
2
( f
ij
f
ji
)
ij
=
1
2
( f
ij
+ f
ji
) = X6
ij
+
ij
ev
h
ijk
=
f
ij
,
k
RFC=8S
aec 6
ij
le symbole de 5ronecIerC
Le principe des traaux irtuels est utilis pour dcrire les quations d'quilibreC ,l
est ncessaire d'associer aux ariables cinmatiques des ariables statiques
dualesC Les tenseurs de contraintes introduits sont lis respectiement aux
d@ormations macroscopiques7 aux d@ormations relaties Rc'est A dire la di@@rence
entre le !radient des dplacements macroscopiques et le !radient cinmatique
microscopiqueS et au !radient des d@ormations microscopiquesC L'expression du
principe des traaux irtuels prend @inalement l'expression ariationnelle suiante :
+our tout c"amp cinmatiquement admissible ('
i
*
, f
ij
*
) 7
|
D
(c
ij
c
ij
('
i
*
)+t
ij
( f
ij
*
'
i
*
,
j
)+2
ijk
h
ijk
) v=
|
D
G
i
'
i
*
v+
|
D
t
i
'
i
*
+:
ij
f
ij
*
s
RFC=;S
c
ij
est le tenseur des contraintes macroscopiques7 t
ij
est appel tenseur des
contraintes microscopiques et 2
ijk
le tenseur de doubles contraintesC t
i
et :
ij
sont respectiement les @orces de traction et les doubles @orces appliques sur la
@ronti4re D C G
i
reprsente les @orces de olume appliques sur D C Aucune
double @orce de olume n'interient ici dans l'expression du traail irtuel extrieurC
+our une @ormulation compl4te int!rant ces lments7 se r@rer aux traaux de
Germain R$;:=bSC
F Stabilit et bi@urcations rencontres en mcanique des sols $#=
Les quations d'quilibre local sous @orme @orte prennent @inalement l'expression
suiante :
(c
ij
t
ij
)
,
j
+G
i
= 0
2
ijk
,
k
t
ij
= 0
RFCH&S
et les conditions aux limites naturelles en contraintes :
(c
ij
t
ij
) n
j
= t
i
2
ijk
n
k
= :
ij
RFCH$S
aec n
j
le ecteur normal A la @ronti4re D C
La complexit des milieux micromorp"iques a restreint l'utilisation de ce mod4le et
beaucoup de scienti@iques ont c"erc" A simpli@ier l'expression de ces milieux7 en
ue d'une exploitation in@ormatiqueC Les di@@rentes restrictions apportes sont
prsentes par Forest et Sieert R#&&FS qui en donnent une ue d'ensemble trie en
@onction du nombre de de!rs de libert introduits dans la description du c"amp
cinmatiqueC Fernandes R#&&;aS en tire le tableau FC$ qui prsente les di@@rents
mod4les existants ayant pour ori!ine les milieux micromorp"iquesC
*om du milieu
*ombre de
ddls suppl/
mentaires
2composition des micro/trans@ormations
Micro/rotations Micro/d@ormations pures
(ydrostatique 2iatorique
r
ij
X
ij
ev
Microdilatation $ non oui non
Micropolaire = oui non non
Microstretc" H oui oui non
Microstrain F non oui oui
Micromor/
p"ique
; oui oui oui
T&%#e& <-, $ Hir&rc7is&ti!n *es mi#ie. = micr!strctre en 2!ncti!n *
n!m%re *e *e5rs *e #i%ert &1!ts @Fern&n*es? /AAD&B
Les milieux A microdilatation sont la @orme la plus d!nre des milieux
micromorp"iques en conserant de la @ormulation d'ori!ine uniquement la partie
"ydrostatique des microd@ormations pures7 X C Ces milieux7 restreints A la
@ormulation en second !radient7 ont t delopps et implants par Fernandes et
alC R#&&;bS dans le lo!iciel CodeTAsterC La restriction des milieux A microdilatation
au mod4le de second !radient de dilatation s'obtient en assumant l'!alit entre la
microdilatation X et la d@ormation olumique macroscopique c
v
C Fernandes
R#&&;aS a notamment traaill sur le cas de consolidation unidimensionnel de
Ter3a!"i d'une colonne de sol porolastiqueC ,l constate que la prise en compte du
milieu de second !radient de dilatation produit des carts aec la rponse du
$#H FC8 Mt"odes de r!ularisation
mod4le analytique7 qui s'estompent pro!ressiement en au!mentant l'incrment de
temps de la modlisationC ,l a !alement ralis un calcul d'excaation souterraine
en couplant ce mod4le de r!ularisation au mod4le de comportement de 2recIer/
+ra!erC Le mod4le de second !radient de dilatation sera prsent plus en dtails
dans le c"apitre Y:C# 7 car il s'a!it du mod4le de r!ularisation c"oisi dans le cadre
de cette t"4se pour supprimer la dpendance pat"olo!ique au mailla!e des
rsultats numriques des probl4mes aux limites tudis aec le mod4le lasto/
plastique de (u%eux RAubry et alC R$;8#S7 (u%eux R$;89S7 c@ Y= SC
Les milieux micropolaires7 encore appels milieux de Cosserat7 s'appuient sur les
traaux des @r4res Cosserat RCosserat et Cosserat7 $;&;SC La cinmatique du milieu
est enric"ie par la prise en compte de de!rs de libert de rotation supposs
indpendants des dplacementsC Cette approc"e a t reprise par Me"l"aus et
1ardoulaIis R$;8:S puis de )orst et Sluys R$;;$SC Ces milieux de Cosserat peuent
nanmoins Btre ramens A un cas particulier des milieux micromorp"iques7 oZ les
microd@ormations pures7
ij
7 s'annulentC -"lers et 1olI R$;;8S ont tendu cette
approc"e A la t"orie des milieux poreux et ont dmontr son e@@icacit sur un cas
de stabilit de talus et un essai biaxial drainC Les milieux de Cosserat sont tr4s bien
adapts pour reprsenter le comportement des matriaux !ranulaires constitus
d'lments pouant tourner localement7 indpendamment du mouement
macroscopiqueC *anmoins7 si le mode de d@ormation ne @ait pas interenir de
rotation des lments7 ces milieux sont ine@@icaces pour r!ulariser le probl4meC
Un mod4le intermdiaire aant la prsentation des milieux micromorp"iques a t
propos par -rin!en R$;;&S7 initialement delopp pour des matriaux composites
ou milieux !ranulairesC Le de!r de libert supplmentaire par rapport aux milieux
micropolaires est la partie "ydrostatique des microd@ormations pures X C -lle
permet la prise en compte de la contraction et de la dilatation de la microstructure
du milieuC Ces milieux ont t notamment utiliss pour modliser les d@ormations
de biomatriaux R'osenber! et Cimrman7 #&&=SC
C"ambon et alC R$;;8S proposent7 A partir de la t"orie des milieux
micromorp"iques7 de traailler dans le cadre des milieux de second !radient locaux7
en assumant l'!alit entre les microd@ormations et les macrod@ormations7
f
ij
='
i
/ ,
j
C A ce %our7 aucune exprimentation n'a dmontr la alidit de cette
simpli@icationC -n reanc"e7 dans le cadre des milieux !ranulaires7 Caletti et alC
R$;;:S7 cit par C"ambon et alC R#&&$S7 ont montr l'quialence entre les rotations
macroscopiques et les rotations moyennes des !rains Ressais raliss en #2 sur
des billesSC 2e ces obserations7 il est possible de construire un cas particulier des
milieux de second !radient7 A saoir les milieux de Cosserat du second !radient7 en
imposant r
ij
=%
ij
C Ces mod4les permettent notamment de s'a@@ranc"ir de la
relation liant les d@ormations relaties7 (
f
ij
'
i
/ ,
j
) 7 aux contraintes
microscopiques7 t
ij
C +ar la suite7 Collin et alC R#&&FS ont ralis l'extension de ces
mod4les A la t"orie des milieux poreuxC Collin et alC R#&&;S appliquent un mod4le
de second !radient local lastique pour reprsenter correctement le comportement
post/localisation d'un cylindre creux A bord pais et en d!a!ent des rsultats
analytiques utiles pour une comparaison des rsultats entre di@@rents codes de
calculC Sie@@ert et alC R#&&;S utilisent !alement les mod4les de second !radient local
pour tudier le probl4me aux limites d'une excaation souterraineC ,ls montrent que
l'utilisation des milieux enric"is permet de conserer l'indpendance des rsultats
aux mailla!esC -n reanc"e7 cette cinmatique enric"it ne restreint pas les solutions
numriques A une solution unique de @a0on analo!ue aux expriences relles
ralisesC
F Stabilit et bi@urcations rencontres en mcanique des sols $#9
<-E-4 Ret!r sr #es m!*+#es *e r5#&ris&ti!n
L'en%eu de ce para!rap"e consistait A s'assurer que le mod4le de r!ularisation
c"oisi dans le cadre de cette t"4se tait bien adapt aux contraintes poses par le
su%etC Ces contraintes sont de types di@@rentsC La premi4re est lie A un mod4le de
comportement lasto/plastique7 adoucissant7 A caract4re non associ et constitu
de plusieurs seuils plastiquesC Le second type de contrainte est li A une
modlisation des milieux poreux saturs7 ncessitant un coupla!e des quations de
la mcanique et de l'"ydrauliqueC Le dernier type de contrainte concerne un
c"ar!ement extrieur dynamique appliqu aux structures considresC
Le coupla!e multi/p"ysique nous impose de considrer des mod4les continus7
puisque le comportement local du matriau dans la 3one d'adoucissement a un rMle
prpondrant sur les c"emins d'coulement pr@rentiels de l'eauC *anmoins7 tous
les mod4les continus prsents ne sont pas @acilement adaptables A cette
modlisation coupleC -n e@@et7 les mod4les continus int!rant une dpendance en
temps introduisent un temps caractristique7 sans considration p"ysique a prioriC
L'utilisation de ces mod4les ncessitera de relier cette !randeur aux quations de
l'"ydrauliqueC
L'ob%ecti@ de la t"4se consiste A c"oisir7 parmi les di@@rents mod4les de
r!ularisation disponibles dans le lo!iciel CodeTAster7 le mod4le le plus adapt au
coupla!e aec un mod4le de comportement de solsC *otre c"oix s'est port sur des
mod4les continus de r!ularisation adaptables en l'tat A tous les mod4les de
comportement locauxC
*anmoins7 les mod4les de second !radient non locaux en d@ormations auraient
pu Btre intressants sous leur @ormulation implicite RGodard R#&&9S [ '9C&HC c@
quation FC=:S7 mBme si leur mise en bure ncessite des deloppements propres
A c"aque mod4le de comportement localC 2es di@@icults seraient alors apparues
pour construire l'oprateur tan!ent local issu du mod4le de comportementC
,l tait !alement possible d'utiliser le mod4le de r!ularisation de ariables internes
RLorent3 R$;;;S [ '9C&HC&$S A condition d'apporter les modi@ications ncessaires aux
sur@aces de c"ar!e locales du mod4leC +our le coupla!e au mod4le de (u%eux7 le
c"oix de la ariable interne aurait alors t la d@ormation olumique plastique
cumule7 car c'est la ariable de coupla!e de tous les seuils du mod4leC
-n utilisant directement le mod4le de second !radient de dilatation RFernandes
R#&&;aS [ '9C&HC&=S7 sans deloppement supplmentaire7 le mBme c"amp scalaire7
A la partie lastique pr4s7 est alors r!ularisC L'autre mod4le continu disponible7 ne
ncessitant pas de deloppements supplmentaires7 est le mod4le de second
!radient local RC"ambon et alC R$;;8S [ '9C&HC&=S7 mod4le cependant plus coXteux
en temps de calculC Ce mod4le pourrait !alement Btre utilis en cas d'c"ec aec
le mod4le de second !radient de dilatationC
Le c"oix du mod4le de second !radient de dilatation limite la r!ularisation du
probl4me aux p"ases de comportement local !nrant des d@ormations
olumiquesC Or7 lorsque le seuil de plasticit par@aite est atteint7 l'incrment de la
d@ormation olumique !nre deient nul7 d'oZ la disparition des e@@ets
r!ularisantsC La lar!eur de la bande de localisation se stabilise ce qui permet
$#F FC8 Mt"odes de r!ularisation
d'enisa!er une poursuite des calculs par une modlisation de type approc"e
discontinueC Cette olution des bandes de cisaillement au cours des essais
numriques est en accord aec les essais exprimentaux raliss sur le sable
d'(ostun R2esrues et 1i!!iani R#&&HSS7 puisque les obserations indiquent que la
densit du matriau tend ers une aleur limite impliquant l'arrBt de d@ormation
olumique au sein de la bande de cisaillement pour de !randes aleurs de
d@ormations diatoiresC
Le c"apitre suiant prsente la @ormulation compl4te du mod4le de second !radient
de dilatation et les c"oix d'int!ration numrique sous CodeTAster raliss par
Fernandes dans le cadre de sa t"4se RFernandes et alC R#&&8S [ Fernandes
R#&&;aS [ '9C&HC&=SC
: Application de la t"orie du second !radient de dilatation $#:
C A00#ic&ti!n *e #& t7!rie * sec!n* 5r&*ient *e *i"
#&t&ti!n
: Application de la t"orie du second !radient de dilatation CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#:
:C$ ,ntroductionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#:
:C# Formulation t"orique du mod4le de second !radientCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$#8
:C= Formulation numriqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$==
:CH Coupla!e aec le mod4le de (u%eux pour des matriaux dilatantsCCCCCCCCCCCCCC$=H
:CHC$ Localisation des d@ormations dans une bande cisailleCCCCCCCCCCCCCCCCCCCCCC$=9
:CHC$C$ +robl4mes en itesse pour les milieux du second !radient de dilata/
tionCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=9
:CHC$C# 'solution analytiqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=9
:C9 Jtude numrique d'un essai biaxial drainCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$=;
:C9C$ 2escription du probl4me aux limitesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H&
:C9C# Mod4les constituti@s utilissCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H$
:C9C#C$ Mod4le de (u%eux de type Cam/Clay ori!inal R(CCSCCCCCCCCCCCCCCCCCCCC$H$
:C9C#C# Mod4le de (u%eux simpli@i R(?SSCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H#
:C9C#C= Mod4le de (u%eux completCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H#
:C9C#CH +aram4tres matriauCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$H#
:C9C= 'ponses locales des mod4les au c"emin biaxial drainCCCCCCCCCCCCCCCCCCCC$H=
:C9C=C$ Comportement des mod4lesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$HH
:C9C=C# 2termination des domaines et cMnes d'instabilitsCCCCCCCCCCCCCCCCCCCCCC$H9
:C9CH (ypot"4ses de calculCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$9#
:C9C9 Comparaison des rsultats numriques et analytiquesCCCCCCCCCCCCCCCCCCCCCCCC$9=
:C9C9C$ 'sultats obtenus aec le mod4le (CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$9H
:C9C9C# -xtension des rsultats aux autres mod4les constituti@sCCCCCCCCCCCCCCC$F=
:C9C9C= 'etour sur la procdure mise en placeCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:&
:C9CF ,ndpendance des rsultats aux mailla!esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:&
:C9C: ,n@luence de la discrtisation du c"ar!ement sur les rsultatsCCCCCCCCCCCCC$:=
:C9C8 Jolution de la lar!eur des bandes de cisaillement au cours du c"ar!e/
mentCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:9
:C9C; 'partition des ner!ies internes CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:F
:C9C$& )ilan et perspecties suite A la modlisation des essais biaxiaux drai/
nsCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$:8
:CF Jtude de stabilit d'un dblaiCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$8&
:CFC$ MotiationCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$8&
:CFC# +rsentation du probl4me aux limites et ses conditions initialesCCCCCCCCCC$8&
:CFC= 'sultats obtenus sans la mt"ode de second !radient de dilatationCC$8#
:CFCH 'sultats obtenus aec la mt"ode de second !radient de dilatationCC$89
:CFC9 )ilan et perspecties de l'tude de stabilit de penteCCCCCCCCCCCCCCCCCCCCCCCCCCC$8;
C-, Intr!*cti!n
L'ide directrice de cette t"4se consiste A mettre A disposition des in!nieurs un
outil de modlisation adapt au comportement cyclique des sols7 capable de
reproduire ou d'anticiper les modes de ruine relati@s A des oura!es du !nie ciilC
Le mod4le de comportement de (u%eux a t c"oisi pour raliser cet ob%ecti@ pour sa
capacit A reproduire une lar!e !amme de p"nom4nes identi@is caractrisant le
comportement des sols !ranulaires sous c"ar!ements monotones et cycliquesC
Les tats de ruine rpertoris @ont tat de deux !randes classes de p"nom4nes
$#8 :C$ ,ntroduction
apparus notamment dans le cadre d'essais de laboratoireC Le premier mode de
rupture se mani@este par l'apparition d'une 3one localise A @ortes d@ormations
diatoriques7 nomme par la suite bande de localisation ou de cisaillementC Ce
mode de rupture est le plus souent obser pour des essais en conditions draines
sur des sables lEc"es ou denses R2esrues et 1i!!iani R#&&HSSC Le second mode se
caractrise quant A lui par une rupture di@@use sans apparition de bandes de
localisationC Le p"nom4ne de liqu@action en est un exemple typique7 obser
notamment dans un essai non drain sur sable lEc"e RSerant R#&&=S cit par
(amadi R#&&FSSC
Les traaux portant sur le mod4le de (u%eux ont notamment montr que ce mod4le
est capable de prdire ces modes de ruine R1ossou!"i R#&&$S7 (amadi R#&&FS7
Costa 2'A!uiar R#&&8SSC *anmoins7 comme prcis au YFC9 7 la bi@urcation des
solutions d'un probl4me "omo!4ne en bandes de localisation7 caractrise par la
perte d'ellipticit des quations r!issant le probl4me Rdans le cas d'un c"ar!ement
quasi/statiqueS7 se traduit7 dans le r!ime de N post/localisation O7 par l'incapacit
du mod4le de (u%eux A caractriser la lar!eur de la bande de localisationC Ce point
critique conduit A une dpendance pat"olo!ique des rsultats numriques aux
mailla!es utilissC Les di@@icults soulees peuent Btre lees en s'appuyant sur
des solutions alternaties A l'approc"e classique des milieux continus7 appeles
!nralement mt"odes de r!ularisation RYFC8 SC Le concept des milieux de second
!radient olumique RFernandes R#&&87 #&&;aSS est une des mt"odes appartenant A
ces solutions alternatiesC
Le mod4le de second !radient de dilatation7 delopp notamment par Fernandes
R#&&;aS7 est prsent en dtails dans ce c"apitreC L'expos portera sur la
@ormulation t"orique de ce mod4le N limiteurs de localisation O7 sur les @ormulations
numriques c"oisies pour implanter le mod4le et en@in la alidation numrique de
cette mt"ode dans le cadre de lois de mcanique des sols7 comme celle de
(u%eux7 sur un essai biaxial drain et une tude de stabilit de pente sous
c"ar!ement d'une @ondation super@icielle en tBte de talusC
Le traail ralis dans cette t"4se a @inalement permis d'entreprendre le coupla!e
entre le mod4le de (u%eux et le mod4le de second !radient olumiqueC Le but de ce
traail consistait alors A caractriser le coupla!e entre ces deux mod4les7 A en
maQtriser les param4tres cls pour7 A terme7 entreprendre une di@@usion de cet outil
aupr4s de l'in!nierieC
C-/ F!rm#&ti!n t7!ri3e * m!*+#e *e sec!n* 5r&*ient
A partir du mod4le des milieux micromorp"iques Rprsent YFC8C#C#C= S7 on peut
restreindre la cinmatique du milieu au c"amp de dplacement classique (
'
i
) 7 A
la ariation olumique microscopique note X et A ses !radients pour d@inir les
milieux A microstructure dilatantsC ,l est ncessaire d'associer aux ariables
cinmatiques des ariables statiques duales : les contraintes macroscopiques
classiques (
c
ij
) 7 la contrainte microscopique de dilatation et les doubles
contraintes ectorielles de dilatation (
1
j
) C est la ariable duale de la
d@ormation olumique relatie (c
v
X) et (
1
j
) la ariable duale du !radient de
la dilatation microscopique
X
,
j
C
On admet que la cinmatique locale du milieu continu micromorp"ique de dilatation
: Application de la t"orie du second !radient de dilatation $#;
occupant le domaine D 7 dans tout c"amp de dplacement irtuel
'
*
appartenant A l'espace ectoriel des c"amps admissibles V
0
Raec les r!ularits
ncessaires7 et nuls sur les bords
D
'
oZ le dplacement est imposS et dans
tout c"amp de dilatation irtuelle X
*
D
0
Raec
X
*
libre sur D
'
S7 est
reprsente par :
le c"amp de tenseur de d@ormation linaris d'ordre #7 symtrique7 de
composantes c
ij
('
*
)=
1
2
( '
i , j
*
+'
j ,i
*
) dans une base cartsienne (e
i
)
i=1,2,3
C +our rappel7 di4 ('
$
)='
i ,i
$
=6
ij
c
ij
('
$
) [
le c"amp de tenseur second !radient de dilatation7 d'ordre $7 de
composantes j
j
=X
, j
C
La notation d'-instein est adopte pour les indices des tenseurs : sommation sur les
indices muets rpts et driation partielleC Les deux c"amps de tenseurs c et
j sont indpendants d'apr4s leur d@initionC
L'expression du traail irtuel de d@ormation pour les milieux micromorp"iques de
dilatation s'exprime comme suit :
W
def
=
|
D
( c
ij
c
ij
('
*
)+(c
v
*
X
*
)+1
j
j
j
(X
*
)) v
R:C$S
On d@init ici les !randeurs tensorielles duales c 7 et 1 des tenseurs de la
cinmatiqueC
On d@init de mBme le traail irtuel des e@@orts extrieurs7 aec
D
f
=D\D
'
:
W
ext
=
|
D
f
i
'
i
*
v+
|
D
f
F
i
'
i
*
s
R:C#S
aec f les @orces de olume appliques sur D et F les @orces de traction
appliques sur D
f
7 sans introduire de c"ar!ement sur le tenseur X C
L'application de l'axiome de l'quilibre du principe des puissances irtuelles au
domaine D conduit aux quations d'quilibre statique :
Trouer c 7 et 1 tels que :
W
def
+W
ext
=0 = \( '
*
,X
*
)V
0
D
0
,
|
D
( c
ij
c
ij
('
*
)+(c
v
*
X
*
)+1
j
j
j
(X
*
)) v =
|
D
f
i
'
i
*
v+
|
D
f
F
i
'
i
*
s
R:C=S
,l exprime l'quilibre statique du syst4me7 sous @orme ariationnelle et d@init les
c"amps de tenseurs c 7 et 1 admissiblesC -n int!rant par parties
W
def
7
on peut en tirer la @ormulation @orte Rquations d'-UL-'S de l'quilibre statique7 en
prenant d'abord des dplacements
'
*
nuls sur le bord D C
c
ij , j
+
,i
+ f
i
= 0
+1
j , j
= 0
dans D
R:CHS
$=& :C# Formulation t"orique du mod4le de second !radient
aec
F
i
= (c
ij
+6
ij
) n
j
1
j
n
j
= 0
les conditions aux limites naturelles appliques sur
la @ronti4re D C
Le passa!e des milieux micromorp"iques de dilatation au mod4le de second
!radient de dilatation s'e@@ectue en considrant la d@ormation olumique relatie
nulleC Autrement dit7 il s'a!it d'assumer l'!alit entre les d@ormations olumiques
macroscopique c
v
et microscopique X :
X(') = '
i , i
j
j
( ') = '
i ,ij
R:C9S
L'expression du principe des traaux irtuels s'crit alors comme suit pour le mod4le
de second !radient de dilatation :
Trouer c et 1 tels que :
W
def
+W
ext
=0 =
|
D
( c
ij
c
ij
('
*
)+1
j
j
j
('
*
)) v=
|
D
f
i
'
i
*
v+
|
D
f
F
i
'
i
*
s \'
*
V
0
R:CFS
-n int!rant A noueau par parties
W
def
7 on peut rcrire le principe comme suit :
Trouer c et 1 tels que :
|
D
c
ij , j
'
i
*
v+
|
D
1
j , jk
'
k
*
v+
|
D
c
ij
n
j
'
i
*
s
|
D
1
j , j
n
k
'
k
*
s+
|
D
1
j
n
j
'
k , k
*
s
=
|
D
f
i
'
i
*
v+
|
D
f
F
i
'
i
*
s \'
*
V
0
R:C:S
aec
n
i
le ecteur normal extrieur A la sur@ace D du solideC
La @ormulation @orte de l'quilibre statique est obtenue A partir de l'expression :C:7
en prenant d'abord des dplacements
'
*
nuls sur le bord D :
c
ij , j
1
j , jk
6
ki
+ f
i
=0 dans D
R:C8S
,l reste ensuite les termes de bord :
|
D
c
ij
n
j
'
i
*
s
|
D
1
j , j
n
k
6
ki
'
i
*
s
|
D
( 1
j
n
j
)
, k
6
ki
'
i
*
s+
|
D
i v(1
j
n
j
'
*
) s
=
|
D
f
F
i
'
i
*
s \'
*
V
0
R:C;S
La derni4re int!rale du premier membre de cette quation ariationnelle oZ l'on a
not (
t
o
,n) la base ort"onorme naturelle locale de la sur@ace du solide7 s'crit
:
:
: C@C par exemple: )amber!er R$;8$S7 tome # Rannexe =S et tome = Rannexe 9SC On obtient
: Application de la t"orie du second !radient de dilatation $=$
|
D
i v(1
j
n
j
'
*
) s=
|
D
n
( 1
j
n
j
'
n
*
)s+
|
D
i v
s
(1
j
n
j
'
o
*
t
o
)s
R:C$&S
aec i v
s
la dier!ence coariante sur la sur@ace D C
Comme D est une sur@ace @erme7 su@@isamment r!uli4re7 on ri@ie que cette
seconde int!rale est nulle Rpar application du t"or4me dier!ence/@luxSC Les
termes de bord s'crient donc :
|
D
c
ij
n
j
'
i
*
s
|
D
1
j , j
n
k
6
ki
'
i
*
s
|
D
( 1
j
n
j
)
,i
'
i
*
s+
|
D
n
( 1
j
n
j
)'
n
*
s
+
|
D
( 1
j
n
j
)
n
'
n
*
s=
|
D
f
F
i
'
i
*
s \'
*
V
0
R:C$$S
La restriction du c"amp de dplacements irtuels
'
*
sur la sur@ace D et la
drie normale
n
'
n
*
de sa composante normale sont des c"amps indpendantsC
On en tire par consquent les quations locales7 conditions aux limites naturelles du
probl4me aux limites7 ayant
n
t
o
=0
7 exprimes dans la base naturelle locale
(
t
o
,n) du bord du solide :
en terme de @orces normales au bord Ren prenant des dplacements irtuels
normauxS :
c
nn
+1
j , j
=F
n
s'r D
f
R:C$#S
en terme de @orces tan!entielles au bord Ren prenant des dplacements
irtuels tan!entielsS :
c
t
o
n
+1
n, t
o
=F
t
o
s'r D
f
R:C$=S
et selon la direction
n
'
n
*
:
1
j
n
j
=1
n
=0 s'r D
Rsur tout le bord du solideS
R:C$HS
L'expression des conditions aux limites est modi@ie pour ce mod4le par rapport aux
milieux micromorp"iques de dilatation7 puisque les ariables c
v
*
et
X
*
ne sont
plus indpendantesC
Le deloppement du mod4le de second !radient a t initi dans le but de
r!ulariser les probl4mes numriques lis A la perte d'ellipticit en quasi/statique ou
d'"yperbolicit en dynamique des quations d'quilibre des probl4mes abordsC Ces
probl4mes numriques apparaissent notamment aec la mt"ode des lments
@inis7 mt"ode utilise pour traiter les probl4mes aux limites prsents par la suiteC
L'"ypot"4se de construction du mod4le de second !radient de dilatation7 supposant
ainsi l'expression de la dier!ence d'un ecteur sur la sur@ace D :
i v 2=2
, i
i
+I
o
o
2
7 car les coe@@icients de C"risto@@el I
on
o
=I
on
n
=I
nn
n
=0 7 pour
la base locale (
t
o
,n) C
$=# :C# Formulation t"orique du mod4le de second !radient
l'!alit des d@ormations olumiques7 :C97 impose la continuit et driabilit du
c"amp de dplacement et de son !radientC Ceci implique d'utiliser pour les mod4les
numriques des lments @inis C$/continusC
+our contourner cette di@@icult7 Matsus"ima et alC R#&&#S proposent d'a%outer des
multiplicateurs de La!ran!e7 A 7 dans l'expression du principe des traaux
irtuels7 contrai!nant ainsi l'!alit :C9C Le principe des traaux irtuels s'crit alors
comme suit :
+our tout c"amp cinmatiquement admissible ('
i
*
, X
*
, A
*
) 7
|
D
( c
ij
c
ij
('
*
)+1
j
j
j
A(c
v
*
X
*
)+A
*
(c
v
X)) v=
|
D
( F
i
'
i
*
) s+
|
D
( f
i
'
i
*
) v
R:C$9S
Tous les c"amps cinmatiques introduits sont au plus C&/continusC Les termes
portant sur les multiplicateurs de La!ran!e sont de si!nes opposs dans :C$9C La
raison principale est lie A la conseration d'une matrice tan!ente de ri!idit d@inie
positie pour la rsolution du syst4me d'quations non linaires ia l'al!orit"me de
*eUtonC -n comparant les quations :C= et :C$97 les multiplicateurs de La!ran!e
peuent Btre assimils A des contraintes microscopiques de dilatationC L'quation
:C$9 sera nomme A prsent @ormulation mixte du mod4le de second !radient de
dilatationC
Le mod4le de second !radient de dilatation doit Btre utilis en prenant en compte
deux lois de comportement : une pour la partie premier !radient et la seconde pour
la relation entre le second !radient et les doubles contraintesC Toute loi de
comportement tablie dans le cadre de la mcanique des milieux continus classique
peut Btre utilise pour relier les d@ormations macroscopiques aux contraintes
macroscopiquesC La loi portant sur le second !radient n'est pas contrainte A une
relation particuli4re7 mais depuis les traaux de Mindlin R$;F9S sur l'lasticit
linaire7 les auteurs utilisent cette loi de comportement pour le second !radientC
2'apr4s les traaux de Mindlin R$;F9S7 Fernandes R#&&;aS tablit la loi lastique
linaire suiante pour le mod4le de second !radient de dilatation :
1
j
=b
s
6
ij
c
v ,i
=
|
1
1
1
2
1
3
=
|
b
s
0 0
0 b
s
0
0 0 b
s
|
c
v
,
1
c
v
,
2
c
v
,
3
, a4ec b
s
+
"
R:C$FS
La restriction des e@@ets microstructuraux A sa partie olumique a pour consquence
de limiter les e@@ets de r!ularisation aux seuls mod4les de comportement
prsentant une ariation olumique durant la p"ase plastiqueC La ma%orit des
mod4les de comportement appliqus pour les sols !n4re des ariations
olumiques aant d'atteindre l'tat critiqueC La cinmatique retenue pour le mod4le
de second !radient de dilatation apparaQt %udicieuse pour deux raisons : le minimum
de de!rs de libert supplmentaires A traiter et la capacit de r!ulariser un lar!e
domaine de la p"ase plastique des matriaux que l'on sou"aite tudierC
: Application de la t"orie du second !radient de dilatation $==
La @ormulation des quations de la dynamique linaire d'un milieu continu aec
second !radient de dilatation sont prsentes au Y;C$& C 2ans cette section7 les
modes de ibrations en lasticit linaire sont explicitsC +ar la suite7 nous
appliquons cette t"orie A la caractrisation des mouements propres d'une couc"e
de sol lastique7 puis une couc"e de sol poro/lastiqueC Les conclusions tablies
sont indiques ci/dessous:
+our la colonne de sol lastique7 la prise en compte des termes de second
!radient de dilatation modi@ie @aiblement la propa!ation des ondes dans le
milieu et conduit A des ondes dispersies Rquialent A la poutre de
Timos"enIoS7 alors qu'elles sont propa!aties et non/dispersies en
lasticit simpleC *anmoins si le module de ri!idit
b
s
est @aible7 le terme
de second !radient de dilatation ne modi@ie pas @ondamentalement le c"amp
d'onde dans le milieuC
+our l'application A la colonne de sol poro/lastique7 dans le cas d'un milieu
non r!ularis7 il apparaQt d%A une dispersion des ondes7 conduisant mBme
pour des milieux impermables A une sin!ularit du syst4me d'quations
r!issant le probl4me aux limites traitC +our les milieux tr4s permables7 on
retroue les solutions tablies pour le milieu lastique7 A saoir des ondes
propa!aties et non dispersiesC
C-4 F!rm#&ti!n nmri3e
L'ob%ecti@ de ce para!rap"e est de prsenter les conclusions tablies par Fernandes
R#&&;aS pour l'implantation numrique du mod4le de second !radient de dilatation
dans CodeTAsterC ,l prcise tout d'abord que les li!nes directrices de son traail
consistaient A rec"erc"er7 pour la @ormulation mixte du mod4le7 les solutions les
moins coXteuses en temps de calcul et les plus prcises possibles7 notamment par
le respect de la contrainte mat"matique c
v
=X C La qualit des rsultats dpend
@ortement du c"oix des @onctions d'interpolation des inconnues nodales7 A saoir le
c"amp de dplacement
('
i
)
7 la d@ormation olumique microscopique X et les
multiplicateurs de La!ran!e A C Ces @onctions d'interpolation coPncident aec les
@onctions de @orme tablies pour les lments @inisC Les conclusions tablies par
Fernandes R#&&;aS sont les suiantes :
,l est pr@rable de considrer des lments @inis trian!ulaires plutMt que des
quadran!ulairesC -n e@@et7 un point ma%eur du probl4me consiste A assurer
au mieux la co"rence des espaces d'approximation de la d@ormation
olumique microscopique et macroscopique7 tout en se restrei!nant A un
c"amp de dplacement C&/continuC Les @onctions de base tablies pour les
lments trian!ulaires permettent de respecter plus @acilement la co"rence
des espaces d'approximation7 A saoir +# pour les dplacements et +$ pour
la d@ormation olumique microscopiqueC Cette co"rence est plus dlicate A
assurer aec des lments quadran!ulaires7 de type Serendip RA 8 nbudsSC
,l n'y a plus d'quialence dans les @ormulations mixtes discr4tes entre le
second !radient de dilatation et le mod4le de second !radient de dilatationC
Le mod4le de second !radient de dilatation et le mod4le de second !radient
simpli@i ne coner!ent pas strictement ers les mBmes solutionsC
L'espace optimal des @onctions de @orme pour les multiplicateurs de
$=H :C= Formulation numrique
La!ran!e7 compte/tenu des restrictions dcrites en introduction7 est un
espace +&7 soit un c"amp constant par lmentC Fernandes a notamment
test des @onctions de @orme +#7 +$ et +&C Le meilleur compromis entre
qualit des rsultats et coXt de calcul a dsi!n les @onctions de @orme +&C
,l prconise l'a%out d'un terme de pnalisation7 r 7 dans la @ormulation
ner!tique du mod4le de second !radient de dilatationC Ce terme de
pnalisation permet d'amliorer les per@ormances numriques des calculsC
Finalement7 pour rduire la sensibilit des rsultats A la aleur du terme de
pnalisation7 il d@init une @ormulation mixte combine au terme de
pnalisationC Cette @ormulation prend alors la @orme suiante :
Trouer c et 1 tels que :
|
D
( c
ij
c
ij
('
*
)+1
j
j
j
A(c
v
*
X
*
)+A
*
(c
v
X)+r (c
v
X)(c
v
*
X
*
)) v=
|
D
( F
i
'
i
*
) s+
|
D
( f
i
'
i
*
)v \( '
*
,X
*
, \
*
)V
0
R:C$:S
+our l'ensemble des tudes menes aec le mod4le de second !radient de
dilatation7 la aleur du param4tre de pnalisation est @ixe A
r=10
14
7 aleur
propose par Fernandes R#&&;aSC
Les lments @inis disponibles dans CodeTAster sont prsents sur les @i!ures
suiantes :
L'application dans CodeTAster de cette modlisation ncessite la superposition de
deux modlisations7 la premi4re en lien aec le calcul des tats de contraintes de la
structure Rpartie standardS et la seconde en lien aec le calcul du tenseur des
doubles @orcesC Les deux modlisations communiquent ensuite dans l'arc"itecture
du code lors de l'assembla!e des termes lmentaires lis A la raideur de la
structureC
C-9 C!0#&5e &;ec #e m!*+#e *e H1e. 0!r *es m&tri&.
*i#&t&nts
2ans une premi4re section7 un exemple analytique7 trait pralablement par
C"ambon et alC R#&&$S dans le cadre des milieux A second !radient7 nous a permis
de caractriser les param4tres cls de ce coupla!eC La section suiante s'attac"e A
dmontrer pour un essai biaxial monotone drain sur sable d'(ostun la capacit des
param4tres identi@is A contrMler la lar!eur des bandes de localisation apparaissant
au cours du c"ar!ementC
La section @inale s'intresse suiant la mBme approc"e A un probl4me de stabilit
Illustration &.1 : Discrtisation lments finis 2D et 'D
: Application de la t"orie du second !radient de dilatation $=9
de pente soumise au c"ar!ement d'une @ondation super@icielle en tBte de talusC
C-9-, L!c&#is&ti!n *es *2!rm&ti!ns *&ns ne %&n*e cis&i##e
La rupture dans les !omatriaux se caractrise souent par la @ormation de 3ones
A d@ormations localises7 relatant un passa!e de 3ones de d@ormations
"omo!4nes ers des modes de d@ormations non "omo!4nesC L'apparition de ce
p"nom4ne peut Btre u sur le plan t"orique comme le c"an!ement spontan du
mode de d@ormation7 assimil A une bi@urcation d'une branc"e de l'quilibre7 c'est A
dire l'intersection de deux branc"es de solutions @onctions des param4tres de
contrMleC 2ans le cadre des milieux continus7 il est possible de d!a!er sous des
conditions restreintes des crit4res de bi@urcation permettant d'identi@ier le param4tre
de contrMle prooquant l'apparition de la bande de cisaillement7 ainsi que les
orientations potentielles de celle/ciC -n reanc"e7 pour les milieux continus
classiques7 le r!ime de N post/localisation O7 notamment la lar!eur de la bande de
cisaillement7 ne peut pas Btre caractriseC Les rsultats exprimentaux montrent
nanmoins que cette lar!eur est un lment intrins4que aux proprits du matriau7
li A sa microstructure R@orme et taille des !rains7 2esrues et 1i!!iani R#&&HSS et son
tat initial Rindice des ides et tat de contraintesSC L'utilisation de la t"orie du
second !radient local de dilatation permet d'enric"ir la cinmatique du milieu
traduisant ainsi les e@@ets de la microstructure A l'c"elle !lobaleC 2ans cette section7
nous allons extraire d'un probl4me analytique bidimensionnel les lments
permettant de caractriser la lar!eur de la bande de cisaillement durant le r!ime
de N post/localisation OC
6.4.1.1 ,ro3lmes en 1itesse pour les milieux du second 0radient de di-
latation
La @ormulation du probl4me en itesse s'crit alors sous la @orme suiante7 en
considrant les @orces de olume constantes :
|
D
c
ij
c
ij
('
*
)+
1
j
j
j
('
*
)v=
|
D
F
i
'
i
*
s \'
*
V
0
R:C$8S
c
ij
7
1
j
et
F
i
sont les dries temporelles des termes introduits dans l'qua/
tion :CFC
6.4.1.2 Rsolution analytique
Le probl4me analytique bidimensionnel
abord ci/dessous a t rsolu par C"ambon
et alC R#&&$S pour un mod4le de second
!radient complet aec le mod4le local
lastoplastique de Mo"r/Coulomb dcrit par
1ardoulaIis et Sulem R$;;97 c"apitre FSC
L'exemple consiste A appliquer le mod4le de
second
!radient de dilatation dans une
couc"e cisaille et A dterminer les solutions
du probl4me en itesseC
Illustration &.2 : Domaine tudi
$=F :CH Coupla!e aec le mod4le de (u%eux pour des matriaux dilatants
On consid4re une couc"e d@inie dans le plan ( , , -) aec . l'axe
perpendiculaire au planC C"ambon et alC R#&&$S consid4rent une couc"e in@inie
comprise entre deux plans d@inis par ,=0 et ,=l Rillustration :C#SC Les c"amps
de dplacement sont nots ' dans la direction , et v dans la direction - C
' et v sont supposs ne dpendre que de , et leurs dries par rapport A
, seront notes ' C
L'tat initial du matriau est d@ini "omo!4neC Les olutions des conditions aux
limites appliques au domaine sont les suiantes :
pour ,=0 7 '=0 7 v=0
pour ,=l 7
F
i
sont connuesC
Les @orces de olume sont supposes constantesC
Les conditions de symtrie appliques A la @ronti4re ,=0 indiquent que le
domaine tudi A une lar!eur totale de 2l C
Ce probl4me peut Btre u comme l'analyse du comportement d'une bande de
localisation7 oZ l'orientation de la bande est suppose et l'tat de contraintes est
laiss libre de toute restrictionC La @ronti4re du domaine en ,=l d@init la 3one de
transition entre la 3one de localisation Rdomaine tudiS et le domaine d'un solide
quelconque oZ les solutions sont supposes r!uli4res et stablesC
Le !radient du c"amp de dplacement dans le domaine prend la @orme suiante :
'
i , j
=
|
'2 0
v 2 0
R:C$;S
Le c"amp de d@ormation macroscopique s'crit explicitement :
c
ij
=
1
2
(
'
i , j
+
'
j , i
)
=
|
'2
1
2
v2
1
2
v 2 0
R:C#&S
Le seul terme non nul du !radient des d@ormations olumiques est :
c
v
,
1
= '22
R:C#$S
L'application du principe des traaux irtuels au c"amp de dplacement impos
apr4s # int!rations par parties donne les quations d'quilibre suiantes pour le
probl4me en itesse :
: Application de la t"orie du second !radient de dilatation $=:
c
ij
,
j
1
j
,
i
,
j
=0 =
c
11
2
1
1
22
9 0
c
12
2
9 0
R:C##S
Les conditions aux limites @ournissent en ,=l :
c
11
1
1
2
9
F
1
c
12
9
F
2
b
s
'
' ' '
= 0
R:C#=S
Apr4s int!ration spatiale des quations d'quilibre en tenant compte des conditions
aux limites pour un probl4me "omo!4ne7 les solutions du probl4me respectent les
quations suiantes :
c
11
1
1
2
9
F
1
c
12
9
F
2
R:C#HS
-n utilisant les lois constituties des premier et second !radients7 les quations
deiennent :
H
1111
'
2
+H
1112
v
2
b
s
'
222
9
F
1
H
1211
'
2
+H
1212
v
2
9
F
2
R:C#9S
Le syst4me d'quations di@@rentielles couples peut se rduire A une quation7 la
seconde quation exprimant une relation linaire entre les premiers !radients des
dplacements erticaux et "ori3ontaux dans la bandeC
H
1111
'
2
+H
1112
F
2
H
1211
'
2
H
1212
b
s
'
222
9
F
1
F
2
H
1211
'
2
H
1212
9
v
2
R:C#FS
Les solutions de ce syst4me d'quations di@@rentielles linaires d'ordre #
s'expriment comme la somme d'une solution particuli4re rpondant aux conditions
aux limites imposes et d'une solution partielle tablie A partir des racines du
polynMme caractristique de ce syst4me : '
2
= '
0
2
+ '
p
2
On suppose pour '
p
2
une solution du type
'
p
2
=e
j ,
qui permet d'tablir l'quation
caractristique suiante :
H
1111
H
1112
H
1211
H
1212
b
s
j
2
=0
R:C#:S
$=8 :CH Coupla!e aec le mod4le de (u%eux pour des matriaux dilatants
On peut alors donner l'expression de la solution partielle en @onction des param4tres
matriau du premier et second !radient :
soit j
2
=
H
1111
H
1212
H
1112
H
1211
b
s
H
1212
R:C#8S
La loi constitutie de premier !radient tant lasto/plastique7 les solutions seront
di@@rentes selon l'tat de la r!ion considreC 2ans une r!ion A comportement
lastique7 la loi constitutie s'crit c=A c et dans une r!ion A comportement
plastique
c=H
ep
c
C
Finalement les solutions du probl4me prennent les @ormes suiantes en @onction du
si!ne de
j
2
=A=
H
1111
H
1212
H
1112
H
1211
b
s
H
1212
R:C#;S
Si A>0 7 alors
'
2
= '
0
2
+( 7
11
exp(j
1
,)+7
12
exp(j
2
,))
R:C=&S
aec j
i
=!.A et '
0
2
obtenue A partir de l'quation de la solution particuli4re :
'
0
2
=
H
1212
F
1
H
1112
F
2
H
1111
H
1212
H
1112
H
1211
et
v
0
2
=
H
1111
F
2
H
1211
F
1
H
1111
H
1212
H
1112
H
1211
R:C=$S
2e plus7 les solutions partielles
'
p
2
ri@ient les quations suiantes :
H
1111
H
1212
H
1112
H
1211
b
s
H
1212
'
p
2
'
p
222
=0
R:C=#S
A partir des conditions de symtrie du domaine tudi et
'
p
2
(l )=0 7 on en dduit
que les coe@@icients
7
11
et
7
12
sont nulsC
Si A0 7 alors
'
2
= '
0
2
+(7
21
c/s(o,)+7
22
sin(o,))
R:C==S
aec o=
.
H
1211
H
1112
H
1212
H
1111
b
s
H
1212
C 2e mBme que pour les solutions
prcdemment tablies pour les 3ones oZ A>0 7 la solution partielle '
p
2
ri@ie
l'quation :C=#C
: Application de la t"orie du second !radient de dilatation $=;
L'expression de la solution dans la 3one oZ A0 @ait apparaQtre des @onctions
tri!onomtriquesC ,l est donc clair qu'une 3one de localisation peut apparaQtre dans
la structureC On peut alors admettre que la structure priil!ie une lon!ueur interne
de
l
c
=2n/ o
7 s'exprimant selon le premier mode de plus basse ner!ieC
On constate aussi que la dpendance de la lon!ueur interne
l
c
est en
.
b
s
C ,l
est intressant de remarquer !alement que la condition d'apparition des solutions
de bi@urcations est contrMle uniquement par les termes du mod4le de premier
!radientC Autrement dit7 la prise en compte d'une cinmatique enric"ie restreinte aux
milieux de second !radient ne modi@ie pas la aleur du param4tre de contrMle
prooquant l'apparition d'une solution bi@urque en bandes de cisaillementC
La mt"ode pour d@inir l'expression d@initie de la solution du c"amp de
dplacement est prsente en dtail dans l'article de C"ambon et alC R#&&$SC Cette
tape n'est pas reproduite dans le mmoire7 puisque les crit4res d'apparition de
solutions bi@urques sont identi@is A partir de l'expression du !radient des itesses
du c"amp de dplacementC
Le para!rap"e suiant est destin A montrer l'intrBt du probl4me analytique
prsent ci/dessus pour appr"ender les probl4mes de localisation des
d@ormations A l'c"elle d'une structureC Les solutions obtenues en relation aec la
lar!eur de bande permettent7 pour un c"emin de c"ar!ement donn7 d'tablir la
relation analytique reliant la lar!eur de bande aux proprits locales du matriau
d@inies pour la partie premier !radient des d@ormations et pour la partie relatie au
second !radient des d@ormationsC
C-: t*e nmri3e *8n ess&i %i&.i&# *r&in
Les expriences ralises en laboratoire sur des essais biaxiaux drains Rtraaux
de t"4se de 2esrues R$;8HS7 (ammad R$;;$S et MoIni R$;;#S cits par 2esrues et
1i!!iani R#&&HSS pour des matriaux contractants et dilatants ont mis en exer!ue
l'apparition de solutions bi@urques caractrises par des bandes de localisation au
sein des c"antillons initialement "omo!4nes peu aant ou au pic de contraintes
diatoires Rmais %amais apr4s le picSC Les procds exprimentaux permettant de
caractriser l'olution des bandes de cisaillement sont l'utilisation des rayons/
!amma7 la streop"oto!rammtrie et la tomo!rap"ie calcule par rayons d
R2esrues et alC R$;;$S et 2esrues et alC R$;;FS7 cits par 2esrues et 1i!!iani
R#&&HSSC 2esrues et 1i!!iani R#&&HS insistent nanmoins sur le @ait que l'orientation
et la lar!eur des bandes de cisaillement est un p"nom4ne oluti@ au cours des
essaisC ,ls indiquent !alement que l'orientation des bandes de cisaillement
c"an!ent en @onction de l'tat initial du matriau Rindice des idesS et la pression de
con@inement appliqueC
A l'ori!ine7 l'apparition des bandes de cisaillement a t interprte comme due A
des "tro!nits du matriau ou encore des conditions aux limitesC 2es
amliorations ont alors t apportes aux prparati@s des c"antillons et des
dispositi@s7 notamment l'lancement de l'c"antillon7 la lubri@ication des sur@aces de
l'c"antillon c"ar!es axialementC Mal!r ces e@@orts7 le mode de rupture localis
s'est maintenu lors des essais drains raliss par la suiteC
2esrues R$;8HS et 1ardoulaIis R$;8&S ont alors mis en idence le caract4re
$H& :C9 Jtude numrique d'un essai biaxial drain
intrins4que des matriaux !ranulaires A produire ces modes de ruptureC ,ls ont ainsi
mis en idence l'aspect non alatoire d'apparition du p"nom4neC
(amadi R#&&FS a prsent7 dans le cadre de ses traaux de t"4se7 la capacit du
mod4le de (u%eux A bien reproduire le comportement des sols pour des essais
"omo!4nes et A identi@ier des cMnes dans l'espace des directions de taux de
d@ormations prooquant des instabilits A l'intrieur strict du crit4re de Mo"r/
CoulombC
Ce para!rap"e s'attac"e A reproduire ces p"nom4nes de localisation par un
mod4le lment @ini7 aec un mod4le de comportement adapt7 en conditions quasi/
statiques et A dterminer la capacit du probl4me analytique RY:CHC$ S A prciser la
lar!eur des bandes de localisation lors de leur apparitionC L'aspect relati@ A la
dpendance pat"olo!ique des rsultats au mailla!e sera !alement trait7 pour
di@@rents mod4les constituti@s Robtenus A partir du mod4le de (u%euxS et param4tres
matriauxC Les rsultats seront !alement analyss par rapport A la discrtisation
du c"ar!ement imposC -n complment de ces param4tres de contrMle de la
modlisation7 l'olution de la lar!eur de la bande de cisaillement au cours du
c"ar!ement sera !alement analyse pour @inalement traiter la question relie A
l'ner!ie interne produite par la prise en compte d'une cinmatique enric"ie telle
qu'introduite dans les milieux A second !radient de dilatationC
Les simulations ralises seront analyses suiant di@@rentes !randeurs de
rsultats :
L'indicateur d'tat plastique instantan des mcanismes monotones du
mod4le de (u%eux d@ini aux points de Gauss7 qui aut $ en c"ar!e
plastique7 & en c"ar!e lastique ou /$ en dc"ar!eC
La courbe du comportement !lobal de la structure en @onction des
dplacements imposs en tBte de l'c"antillonC
L'amplitude des d@ormations olumiques plastiques cumules7 ariable de
coupla!e entre les mcanismes du mod4le de (u%eux7 obtenue aux points
de GaussC -lle sera isualise sous @orme d'isoaleurs sur l'ensemble de la
structure ou encore prsente par l'intermdiaire d'une coupe erticale
passant au centre de l'c"antillonC
C-:-, Descri0ti!n * 0r!%#+me &. #imites
L'exemple considr simule un essai biaxial
drain sur sable d'(ostunC L'c"antillon considr
est d@ini !omtriquement comme plan7
caractris par une "auteur de #& cm et une
lar!eur de $& cmC Les d@ormations "ors/plan sont
nulles durant toute la modlisationC Un
c"ar!ement latral constant en pression est
appliqu sur les bords de la structureC Un
crasement axial monotone est impos en tBte de
l'c"antillon par dplacementC L'illustration :C=
prsente la !omtrie de l'c"antillon ainsi que les
sollicitations extrieures appliquesC
Les dplacements erticaux de la base de
Illustration &.' : Cssai bia9ial :
gomtrie et sollicitations
: Application de la t"orie du second !radient de dilatation $H$
l'c"antillon sont bloqus7 tandis que les dplacements "ori3ontaux sont bloqus
uniquement au coin !auc"e in@rieur de la structureC Le dplacement axial impos
en tBte de l'c"antillon arie linairement au cours du c"ar!ementC
Les conditions naturelles portant sur le tenseur de double @orce imposent
1
j
, n
j
=0
sur les bords de la structureC
C-:-/ M!*+#es c!nstitti2s ti#iss
La complexit du mod4le de (u%eux a t appr"ende en plusieurs tapes7 en
construisant des mod4les A di@@icult croissanteC -n c"oisissant %udicieusement les
param4tres matriau du mod4le de (u%eux7 il est possible de traailler aec des
mod4les de comportement A complexit ariableC
2eux mod4les constituti@s ont t identi@is pour permettre une appr"ension
croissante des di@@icults lies au mod4le complet de (u%euxC Les complexits du
mod4le complet sont relaties A l'approc"e multi/mcanismes7 mobilisation
pro!ressie de l'an!le de @rottement pour les mcanismes diatoires7 prise en
compte d'un crouissa!e cinmatique pour les c"ar!ements cycliquesC
-n n!li!eant les e@@ets du mcanisme isotrope7 les rponses du mod4le sont
uniquement modi@ies quantitatiement pour un essai biaxial drain monotoneC
L'crouissa!e isotrope appliqu aux mcanismes diatoires7 portant sur la
mobilisation pro!ressie de l'an!le de @rottement7 permet de d@inir un domaine
lastique relatiement @aible et conduit !alement A une olution pro!ressie des
proprits du tenseur de ri!idit constituti@C La prise en compte de cet crouissa!e a
un e@@et non n!li!eable sur le temps de calcul au nieau de l'int!ration localeC
Le c"ar!ement appliqu est exclusiement monotone et la branc"e @ondamentale
de solution est "omo!4ne sur le domaineC
6.5.2.1 Modle de #u$eux de type Cam-Clay ori0inal %#CC(
L'obtention d'un mod4le proc"e du mod4le de Cam/Clay ori!inal s'e@@ectue en
modi@iant plusieurs param4tres du mod4le de (u%euxC
+our supprimer l'crouissa!e cinmatique du mod4le de (u%eux7 les rayons
lastiques diatoires7 r
,c-c
el+
7 utiliss pour les mcanismes cycliques doient Btre
ports directement A la aleur de l'unitC 2e cette @a0on7 les mcanismes diatoires
cycliques peuent Btre crs7 mais ne seront %amais sollicits au cours du
c"ar!ementC
+our n!li!er l'e@@et des mcanismes isotropes monotone et cyclique7 le param4tre
d@inissant la distance entre la droite de consolidation isotrope et la droite d'tat
critique doit Btre ampli@i de telle sorte que les tats de contrainte atteints durant
l'essai restent tou%ours dans le domaine lastique du mcanisme isotrope
monotoneC
L'crouissa!e isotrope appliqu A la mobilisation pro!ressie de l'an!le de
@rottement peut Btre anni"il en imposant une aleur du rayon lastique diatoire
monotone7 r
, m)n
el+
7 !ale A l'unitC
Les trois modi@ications imposes permettent @inalement d'obtenir un mod4le
constituti@ local proc"e du mod4le de Cam/Clay pour les sur@aces de c"ar!e
diatoiresC
$H# :C9 Jtude numrique d'un essai biaxial drain
L'expression des sur@aces de c"ar!e diatoires se rduit donc A l'criture suiante
Roir quation =C$$S :
f
k
ev
(c ,c
v
p
)=q
k
+" p
k
(
1bln
(
p
k
#
c
(c
v
p
)
))
R:C=HS
La r4!le d'coulement plastique prend la @orme suiante Roir quation =C$9S :
1
k
ev
=
1
k
2q
k
o
2
(
sin +
q
k
p
k
)
/
k
R:C=9S
La r4!le d'crouissa!e isotrope porte par la pression critique ne c"an!e quant A
elle pas de @orme Rc@ quation =C$=SC
-n imposant b=1 7 on retroue un mod4le lasto/plastique associC
6.5.2.2 Modle de #u$eux simplii %#78(
2e mBme que pour le mod4le constituti@ prsent ci/dessus7 l'crouissa!e
cinmatique est inexistant et les mcanismes isotropes monotones ne peuent pas
Btre actis7 en imposant une expression de la sur@ace de c"ar!e inaccessible pour
tous les tats de contrainte enisa!eablesC
Le mod4le est construit selon une r4!le d'coulement non associe7 telle que
prsente au Y=C= C Le mod4le ainsi d@ini est quasi/identique au mod4le de (u%eux
complet pour les c"ar!ements d'un essai biaxial drainC
Les sur@aces de c"ar!e diatoires prennent donc l'expression suiante :
f
k
ev
(c ,c
v
p
, r
k
)=q
k
+" p
k
(
1bln
(
p
k
#
c
(c
v
p
)
))
r
k
R:C=FS
La r4!le d'coulement plastique d@inie prend la @orme suiante :
1
k
ev
=
1
k
2q
k
o
2
( r
k
)
(
sin+
q
k
p
k
)
/
k
R:C=:S
La r4!le d'crouissa!e suiie par les rayons diatoires monotones est donne par
la relation =C$:C
6.5.2.3 Modle de #u$eux complet
Le mod4le de (u%eux a t prsent dans son ensemble au Y= C
6.5.2.4 ,aramtres matriau
Le tableau :C$ prsente l'ensemble des param4tres matriaux tablis pour les
di@@rents mod4les suiant le %eu de param4tres initial propos par Lope3/Caballero
et alC R#&&=bSC
: Application de la t"orie du second !radient de dilatation $H=
PARAMETRES HCC HIS
HUIEUJ
DREEK
#
0
( "#+) /&79 /&79 /&79
ELASTICITE
K ( "#+) H&& H&& H&&
G( "#+) $8H $8H $8H
n
e
& & &
#
ref
( "#+) /$ /$ /$
ETAT CRITILUE H PLASTICITE PARFAITE
(egr(s) == == ==
$: $: $:
#79&-h&&9 #79&-h&&9 #79
b
$ &7# &7#
#
7!
( "#+) /8 /8 /8
LOI D8ECOULEMENT H ECROUISSAGE ISOTROPE
( egr(s) == == ==
+
m)n
&7&$8 &7&$8 &7&$8
+
c-c
&7&&&# &7&&&# &7&&&#
c
m)n
&7&&&$ &7&&&$ &7&&&$
c
c-c
&7&&&&9 &7&&&&9 &7&&&&9
,
m
$ $ $
SEUIL DES DOMAINES
r
, m)n
el+
$7&&& &7&&9 &7&&9
r
,c-c
el+
$7&&& $7&&& $7&&&
r
h-s
&7#9 &7#9 &7#9
r
m)b
&7; &7; &7;
r
is)
el+
$7&&& $7&&& &7&&&$
o $ $ $
T&%#e& C-, $ P&r&m+tres m&tri& 0!r #es m!*+#es c!nstitti2s *2inis &
MC-:-/
C-:-4 R0!nses #!c&#es *es m!*+#es & c7emin %i&.i&# *r&in
Cette section a pour but de prsenter dans un premier temps les rponses des
di@@rents mod4les constituti@s construits au Y:C9C# pour un c"emin biaxial drain sur
un point matrielC
$HH :C9 Jtude numrique d'un essai biaxial drain
2ans un second temps7 on s'intresse7 pour les di@@rents mod4les construits7 A
l'approc"e mise en place par ,mposimato et *oa R#&&$S relatie au domaine de
bi@urcation matrielle au sens de (illC
6.5.3.1 Comportement des modles
Les rsultats obtenus7 pour un c"emin biaxial drain7 A trois taux de con@inement
donns7 pour les trois mod4les constituti@s7 sont prsents sur les illustrations :CH7
:C9 et :CFC Les param4tres matriau utiliss conduisent A dcrire le comportement
d'un sol denseC Les rsultats sont prsents dans les quatre plans reprsentati@s du
comportement des sols7 ( p , q) 7
(c
1
,j)
7
( p , c
v
)
et
(c
1
,c
v
)
7 aec
p=
tr (c)
3
7 q=c
1
c
3
7 j=q/ p et c
v
=c
1
+c
3
C
Les mod4les type Cam/Clay R(CCS et (u%eux @ont apparaQtre un pic de contraintes
aant un radoucissement pour ces taux de con@inementC Ces trois mod4les
prdisent !alement un comportement dilatant du matriau sous ce c"emin de
c"ar!ement pour les con@inements c"oisisC Les aleurs du pic de contraintes sont
di@@rentes entre le mod4le de (u%eux complet et sa ersion simpli@ie (CC7 car le
param4tre b du mod4le a t modi@i entre les deux mod4lesC Le c"oix du
param4tre b=1 aec le mod4le (CC permet de traailler initialement aec un
mod4le de comportement A coulement plastique associC
Les rsultats obtenus aec le mod4le de (u%eux sans mcanisme isotrope R(?SS et
le mod4le complet sont quasi/identiques7 que ce soit en termes de contraintes ou de
d@ormations olumiquesC Les di@@rences entre ces deux mod4les sur ce c"emin de
c"ar!ement sont mineuresC
Les l!endes prsentes sur les illustrations :CH7 :C9 et :CF int4!rent !alement la
droite d'tat critique note CSL RN Critical State Line OSC
Illustration &.* : Cssais bia9iau9 drains modliss a5ec le mod$le de :u6eu9 dgrad en
+am.+la> . :++
: Application de la t"orie du second !radient de dilatation $H9
6.5.3.2 4termination des domaines et c9nes d/insta3ilits
Sur des c"emins biaxiaux drains de compression7 il apparaQt des instabilits A
l'intrieur strict de la sur@ace limite de Mo"r/Coulomb R2esrues et 1i!!iani R#&&HSSC
(amadi R#&&FS a ralis7 en se basant sur les traaux de 2are et Laoua@a R#&&&S7
Illustration &.1 : Cssais bia9iau9 drains modliss a5ec le mod$le de :u6eu9 sans
mcanismes isotropes ni mcanismes c>cli)ues . :J4
Illustration &.B : Cssais bia9iau9 drains modliss a5ec le mod$le de :u6eu9
$HF :C9 Jtude numrique d'un essai biaxial drain
une tude numrique sur l'existence d'un domaine d'instabilit matrielle au sens de
(ill A l'intrieur strict de la sur@ace limite de Mo"r/Coulomb7 aec le mod4le de
(u%euxC
Un deloppement analytique de la condition de stabilit de (ill uniquement dans la
direction associe A ce tra%et de c"ar!ement y est prsentC 2ans le cas d'un
c"emin biaxial drain imposant une contrainte latrale constante7 l'expression
!nrale du traail du second ordre deient :
2
W= c
1
c
1
R:C=8S
Le traail du second ordre s'annule pour une contrainte incrmentale diatoire
nulle et reste n!ati@ le lon! de la branc"e descendante Rc'est A dire pente
d'adoucissementS7 si elle existe7 tant que le c"ar!ement de compression se
poursuitC
Les pics de contrainte7 s'ils existent7 sont atteints A l'extrieur de la sur@ace limite de
Mo"r/Coulomb Rc'est A dire au dessus de la droite d'tat critiqueSC
(amadi R#&&FS prsente la mt"odolo!ie systmatique de rec"erc"e des directions
instables7 d@inie par 2are et Laoua@a R#&&&S7 pour des c"emins biaxiaux drains
en compression7 en tudiant le si!ne du traail du second ordre Rillustration :C:S7
quantit directionnelle dans l'espace des taux de d@ormations retraduite dans
l'espace des contraintes atteintes par le tenseur constituti@ du mod4leC
La mt"ode consiste A raliser un c"ar!ement biaxial7 suii par des c"emins
radiaux en contraintes imposes dans toutes les directionsC Sur c"aque c"emin7 la
aleur directionnelle de
2
W
est calculeC Le c"emin biaxial drain est caractris
par le rapport de contraintes
(=c
1
/ c
3
7 dcriant l'tat de contrainte apr4s la
p"ase initialeC La limite entre les 3ones de c"ar!ement et dc"ar!ement peut Btre
dtermine par la condition suiante :
f
c
c=0 R:C=;S
Illustration &.& : Lrocdure de rec-erc-e directionnelle des directions instables dans le plan
de contraintes au sens de :ill sur un c-emin bia9ial drain
: Application de la t"orie du second !radient de dilatation $H:
Cette mt"ode de rec"erc"e directionnelle ne
re!roupe pas l'ensemble des directions
potentiellement instables du mod4le7 puisque les
directions incluant une ariation de la distorsion
du milieu ne sont pas inclusesC Cette mt"ode ne
reprsente donc pas une mt"ode ex"austie des
directions instables7 mais bien une restriction des
directions de sollicitations A une conseration des
directions principales du tenseur de contraintesC
On pourra en reanc"e conclure lors de la
dtection d'une direction d'instabilits du mod4le
de comportement qu'il existe des directions
instables A ce nieau de c"ar!ementC
+ar souci de clart7 la prsentation circulaire adopte par 2are et Laoua@a R$;;;S
Rcits par (amadi R#&&FSS est utilise pour prsenter les quantits directionnelles : le
traail du second ordre normalis
2
W
7 le dterminant du tenseur de ri!idit
symtris et ( H
s
ep
)
et le dterminant du tenseur de ri!idit
et ( H
ep
) C Cette
reprsentation permet d'amliorer la lisibilit en cas de c"an!ement de si!ne de la
!randeur considre F ( 0) 7 aec 0 l'an!le caractrisant la direction des
incrments de contraintes ou de d@ormationsC L'illustration :C8 prsente le principe
de cette mt"odeC
Un param4tre
r
0
est introduit et d@ini comme suprieur A la aleur minimale de la
@onction polaire F
p
( 0) :
\0, F ( 0)=F
p
( 0)+r
0
+vec r
0
>
min
(
F
p
( 0)
) R:CH&S
La pro%ection dans le plan de la @onction polaire F ( 0) permet de retrouer une
reprsentation circulaire de la @onction :
F ( 0)=
( F
p
( 0)+r
0
) c/s0
( F
p
( 0)+r
0
) sin0
R:CH$S
Les mt"odolo!ies dcrites ci/dessus sont appliques aux mod4les de
comportement tablis au Y:C9C# C
Le traail prsent au Y:C9C=C#C# en complment de celui ralis par (amadi R#&&FS
consiste A quanti@ier l'apport des mcanismes cycliques du mod4le de (u%eux lors
de l'utilisation de la mt"ode de rec"erc"e de directions instables lies au mod4le
de comportementC La prise en compte des mcanismes cycliques est e@@ectue en
ralisant des essais biaxiaux cycliques7 qui permettent de caractriser l'e@@et des
mcanismes cycliques et de la d@ormation olumique plastique7 qui olue au
cours de ces c"ar!ements successi@sC
C-:-4-/-, M!*+#e *e H1e. *5r&* en C&m"C#&( " HCC
+our le mod4le (CC7 l'apparition de la premi4re direction instable est simultane A
Illustration &.0 : Diagramme circulaire
de la fonction polaire F ( 0)
$H8 :C9 Jtude numrique d'un essai biaxial drain
l'annulation du traail de second ordre dans la direction de c"ar!ement pour
c
3
=300 k#+
C Cette apparition correspond au pic des contraintes axiales rele
sur l'illustration :CHC
+our ce mod4le7 le domaine d'instabilits pour ce c"emin de c"ar!ement est
directement d@ini par un cMne de directions instables de c"ar!ement Rillustration
:C;SC Les aleurs reprsentes sont tronques en @onction du minimum de la
@onction A reprsenterC
Les rsultats prsents sont tablis pour les param4tres matriaux issus du tableau
:C$ et un tat de contraintes initial isotrope
c
3
=300 k#+
C
Les rsultats issus du dterminant de H
s
ep
ne sont pas prsents puisque ce
mod4le constituti@ est A coulement associC Le tenseur de ri!idit
H
ep
demeure
tou%ours symtriqueC Les rsultats issus du dterminant de
H
ep
sont identiques A
ceux du dterminant de H
s
ep
C
C-:-4-/-/ M!*+#e *e H1e.
Les domaines de directions instables oluent au cours du c"ar!ement de
compression drain aec le mod4le de (u%eux complet et !alement celui d@ini
sans les mcanismes diatoires cycliques et mcanismes isotropes R(?SSC Les
rsultats obtenus sont prsents sur l'illustration :C$& dans le plan |
c
1
, c
3
C Les
droites de c"ar!ement "ydrostatique et d'tat critique sont !alement indiques
dans ce planC Sur l'illustration :C$&a7 on reprsente la premi4re direction instable
obtenue par la mt"ode prsente sur l'illustration :C: pour cinq aleurs di@@rentes
de con@inement
c
3
ariant entre | !00 kPa ,100kPa C Sur l'illustration :C$&b7
seuls les rsultats de trois pressions de con@inement sont reprsents dans le but
d'amliorer la lisibilit des rsultatsC
Illustration &." : 2eprsentations circulaires du tra5ail
2
W
(E gauc-e) et du dterminant
H
ep
(E droite) en dformations planes pour un tat de contraintes latrales
c
3
=300 k#+ au pic de contraintes pour le mod$le :++
: Application de la t"orie du second !radient de dilatation $H;
Les rsultats obtenus corroborent ceux de (amadi R#&&FS et un lar!e domaine
potentiellement instable apparaQt pour les di@@rents tats de contrainte initiaux
testsC
Les @ronti4res d'initiation des domaines instables se situent7 pour les tats de
contrainte prsents7 A une aleur limite de (>2 7 aleur in@rieure A la droite
d'tat critique caractrise par (=3,3' Rillustration :C$&aSC
Si on poursuit le c"ar!ement7 plusieurs directions peuent alors conduire7 pour le
mod4le de (u%eux7 A des instabilits restreintes A un cMne unique de directions
instables Rillustration :C$&bSC Ces directions sont orientes dans le sens d'une
dc"ar!e des contraintesC On remarque !alement que le c"emin biaxial drain
n'est %amais instable aant d'atteindre le pic de contraintes RcMne reprsent par le
dernier cMne de c"aque
c
3
S7 puisque la direction erticale n'est %amais incluse
dans ces cMnesC
Aec le mod4le de (u%eux7 contrairement au mod4le ,*L de 2are R$;8&S R+runier
R#&&8SS7 il n'y a pas apparition d'un second domaine d'instabilits pour des
incrments de contraintes en direction de c"ar!ementC
Illustration &.1! : Lremi$re direction instable (gauc-e.a) et cMnes d'instabilits (droite.b) en
dformations planes dans le plan |
c
1
, c
3
pour le mod$le :J4 au sens de :ill : sable
d':ostun E D%=((%
Illustration &.11 : Lremi$re direction instable (gauc-e.a) et cMnes d'instabilits (droite.b) en
dformations planes dans le plan |
c
1
, c
3
pour le mod$le :J4 au sens de :ill : sable d':ostun
E D%=((% ; c-argement monotone (noir) = c-argement c>cli)ue (rouge)
$9& :C9 Jtude numrique d'un essai biaxial drain
-n considrant le mod4le de (u%eux int!rant les mcanismes diatoires
cycliques7 on remarque apr4s un cycle de c"ar!e/dc"ar!e/rec"ar!e R
(-!, (-0,2 , (-! S7 une olution concernant le domaine d'instabilits du
matriauC La premi4re direction instable apparaQt pour une aleur de ( plus @aible
et le cMne d'instabilits s'a!randit aec l'olution de c
v
p
pour un matriau dilatant
Rillustration :C$$bh3oom sur l'illustration :C$#SC
Cependant7 cette analyse d'instabilit
matrielle est mene pour un c"amp de
d@ormation et de contrainte obtenu sur
la branc"e @ondamentale de solutions
"omo!4nesC Les probl4mes aux limites
d@inis par des c"amps de contrainte et
de d@ormation non "omo!4nes peuent
Btre soumis7 en pratique7 A des
instabilits7 si les directions des
incrments de contrainte sont contenus
dans le cMne des directions instables et
que les sollicitations externes et les
conditions aux limites cinmatiques leur
permettent de se delopperC
La reprsentation circulaire du traail de
second ordre7 du dterminant des
tenseurs de ri!idit symtris et
tan!entielle permet de %usti@ier les
rsultats prsents sur l'illustration :C$&bC +our un tat de contrainte initial
c
3
=300 k#+
7 l'illustration :C$=a prsente les reprsentations circulaires du traail
de second ordre au point d'apparition de la premi4re direction instable et pour un
rapport de contrainte (=3,00 C On constate une premi4re direction d'instabilits A
0=!2 de!rs pour laquelle le traail de second ordre deient n!ati@ Raleur en
accord aec les traaux de (amadi R#&&FS7 qui trouait un an!le compris dans
l'interalle 0=!0 de!rs et 0=!! de!rsSC La reprsentation polaire de
et ( H
s
ep
)
permet d'identi@ier une 3one tensorielle beaucoup plus lar!e oZ la
condition et ( H
s
ep
)<0 est remplie Rillustration :C$=bSC *anmoins7 le cMne
d'instabilits dtectes aec la condition de (ill est tou%ours inclus dans la 3one oZ
et ( H
s
ep
)<0 C Le pic de contrainte n'tant pas encore atteint7 le dterminant du
tenseur de ri!idit tan!entielle reste tou%ours positi@ Rillustration :C$=cS7 mais sa
aleur diminue au cours du c"ar!ementC
2e mBme que pour l'illustration :C;7 les aleurs reprsentes sous leur @orme polaire
sont tronques en @onction du minimum de la @onction A reprsenterC
Illustration &.12 : +Mnes d'instabilits en
dformations planes dans le plan |
c
1
, c
3
pour le mod$le :J4 au sens de :ill : sable
d':ostun E D%=((% ; c-argement
monotone (noir) = c-argement c>cli)ue
(rouge)
: Application de la t"orie du second !radient de dilatation $9$
Les points abords en re!ard du mod4le de (u%eux complet7 c'est A dire int!rant
les mcanismes cycliques7 sont repris sur l'illustration :C$H pour exprimer en
reprsentation polaire la dimension lar!ie du cMne d'instabilits induite par
Illustration &.1' : 2eprsentation polaire du
2
W
(a) ; et ( H
s
ep
)
(b) ; et
et ( H
ep
)
(c)
a5ec le sable d':ostun E D2N00O (gauc-e . (=2,3& et droite . (=3,00 )
$9# :C9 Jtude numrique d'un essai biaxial drain
l'olution de c
v
p
C
Le %eu de param4tres matriau conduit
bien A des instabilits matrielles A
l'intrieur strict du crit4re de Mo"r/
Coulomb7 A l'inerse du mod4le (CCC
Ces cMnes d'instabilits sont sources
d'instabilits constates au cours des
modlisations par lments @inis aec le
mod4le de (u%eux complet ou rduit A
ses sur@aces diatoires monotones7
(?SC Ces sources d'instabilits dans les
calculs par lments @inis seront
abordes au Y:C9C9C# C
C-:-9 H(0!t7+ses *e c&#c#
L'al!orit"me de rsolution de CodeTAster est dcrit bri4ement dans cette sectionC
Une description plus compl4te est propose dans la documentation en li!ne
^'9C&=C&$_C
,l s'a!it de l'al!orit"me de *eUton utilis pour rsoudre les probl4mes quasi/
statiques non linairesC La solution d'quilibre au probl4me pos est obtenue de
proc"e en proc"eC +our @aciliter la coner!ence du calcul7 un param4tre assimil au
temps7 sans en aoir ncessairement la si!ni@ication p"ysique7 est a%out dans le
but d'introduire une discrtisation du contrMle du c"ar!ement appliquC
A c"aque pas de temps t 7 l'quilibre mcanique est assur par la relation
ectorielle suiante Rexpose !alement au Y;C8C# S :
%('
i
t
)=F
e,t
( t ) R:CH#S
oZ
F
e,t
reprsente les @orces extrieures appliques A la structure et
%(U(t ))= 9
t
c
(U (t ) , t)
7 9 tant l'oprateur discret reprsentant l'int!rale des
puissances de d@ormations irtuelles sur le domaine complet et c le c"amp de
contraintes discrtis calcul en c"aque point matriel du domaineC '
i
t
sont les
composantes du c"amp de dplacement
('
t
)
C La rsolution du syst4me
d'quations non linaires est ralise en utilisant la mt"ode de *eUton/'ap"son7
dont l'initialisation est donne par une tec"nique d'-uler explicite7 suiie d'itrations
de correction :
%
'
i
n,t
( '
i
n , t
)
6'
i
n+1
= %( '
i
n ,t
)+F
ext
( t )
'
i
n+1, t
= '
i
n,t
+6'
i
n+1
R:CH=S
oZ '
i
n, t
dsi!ne l'inconnue nodale du c"amp de dplacement A l'itration n du
Illustration &.1* : 2eprsentation polaire du
2
W
a5ec le sable d':ostun E
D%=((% pour (=3,00 ; c-argement
monotone (noir) = c-argement c>cli)ue (bleu)
: Application de la t"orie du second !radient de dilatation $9=
pas de temps en cours t C 6'
i
n
est la correction incrmentale de '
i
t
A l'itration
n de *eUtonC
Un crit4re de coner!ence est tabli en rapport aec la norme du ecteur rsidu :
%('
i
n ,t
)F
e,t
(t )
F
e,t
(t )
j
t)l R:CHHS
oZ
j
t)l
est une tolrance A respecter pour obtenir coner!ence et
la norme
usuelle des ecteursC
Le retour d'exprience sur les di@@rents calculs mens pour modliser les essais
biaxiaux drains ont montr qu'il tait ncessaire pour traiter les comportements
adoucissants d'apporter des modi@ications A l'al!orit"me de *eUton/'ap"sonC
Fernandes R#&&;aS prconise ainsi l'emploi d'une mt"ode de pilota!e pour obtenir
la coner!ence des calculs aec le mod4le local de 2recIer/+ra!erC *ous aons
alors tent d'appliquer cette approc"eC
Le principe des mt"odes de pilota!e consiste A dterminer l'intensit d'une partie
du c"ar!ement pour satis@aire une contrainte sur les dplacementsC La mt"ode de
pilota!e qui a t utilise7 disponible dans CodeTAster7 est dcrite dans le document
^'9C&=C8&_ disponible sur le site du CodeTAsterC -lle introduit des quations de
contrMle par incrment de d@ormation Roir Lorent3 et )adel R#&&HSSC 2ans ce cas7
la direction de d@ormation du pas de temps courant doit Btre la mBme que celle du
dbut du pas de temps pour au moins un point de la structureC La continuit de la
d@ormation est ainsi assureC
Mal"eureusement7 les rsultats obtenus aec cette mt"ode ne sont pas
satis@aisants et mettent rapidement en d@aut l'int!ration locale du mod4le de
(u%euxC Cette mise en d@aut du mod4le de (u%eux apparaQt pour des incrments de
d@ormations tr4s importantsC La mt"ode de pilota!e a alors t couple non plus A
l'oprateur tan!ent !lobal
%
'
i
n,t
('
i
n , t
)
7 mais A l'oprateur lastique
K
e
tabli A
partir des proprits lastiques non linaires du milieu Rc@ quation =C$&SC Cette
mt"ode de rsolution du probl4me non linaire en comparaison A l'approc"e
classique de type *eUton/'ap"son modi@i n'a pas donn de meilleurs rsultatsC
-lle a t utilise en dernier recours7 lorsque la mt"ode de *eUton/'ap"son
modi@i dier!eait RY:C9C9C# SC
+our l'ensemble des calculs prsents ci/apr4s7 si aucune mention particuli4re n'est
indique7 la coner!ence numrique est considre acquise pour une norme du
ecteur rsidu relati@ sur l'quilibre in@rieure A j
t)l
<10
4
Rd@ini A l'quation :CHHSC
C-:-: C!m0&r&is!n *es rs#t&ts nmri3es et &n&#(ti3es
2ans le cadre de ces traaux7 nous aons ralis la simulation par la mt"ode des
lments @inis d'un essai biaxial sur sable d'(ostun aec le mod4le de (u%eux7 dont
les proprits des matriaux ont t tablies par Lope3/Caballero et alC R#&&=bS
Rtableau :C$SC La modlisation est base sur le coupla!e de la mt"ode de second
!radient de dilatation RFernandes et alC7 #&&8S au mod4le de (u%eux R(u%eux7 $;89S
pour la partie premier !radientC
Le but de ce traail est de dterminer les param4tres ma%eurs contrMlant la lar!eur
$9H :C9 Jtude numrique d'un essai biaxial drain
de la bande de cisaillementC L'ide initiale consiste A relier les rsultats obtenus
aec l'essai de cisaillement analytique prsent au Y:CHC$ aux rsultats issus de la
mt"ode des lments @inis pour di@@rents essais biaxiaux drainsC -n e@@et7 apr4s
une campa!ne d'essais numriques consistant A @aire arier les tats de contraintes
initiales ou la pression critique de r@rence7 des olutions importantes ont t
relees pour la lar!eur de la bande de cisaillementC Ces olutions de lar!eur de
bandes en @onction des tats de contraintes ou des ariables internes doient Btre
maQtrises dans l'optique d'une utilisation industrielle du coupla!e mod4le de
(u%eux<mod4le de second !radient de dilatationC
-n simpli@iant le probl4me d'instabilits mis en aant lors d'un essai biaxial drain7 la
problmatique consiste A maQtriser la lar!eur de la bande de localisation lors de
l'essai biaxial pouant se ramener au probl4me analytique prsent au Y:CHC$ C
Cette simpli@ication du probl4me peut Btre utilise au point d'initiation de la
bi@urcation en bande de cisaillementC L'exercice7 men ci/dessous7 traite le
probl4me de bandes dans un rep4re local soumis A un an!le de rotation oluti@
correspondant A l'orientation de la bande dans l'c"antillonC
+our l'ensemble des rsultats prsents pour la campa!ne d'essais numriques7
des procdures automatiques ont t mises en place pour dterminer la lar!eur de
la bande de localisation dans l'c"antillonC
2eux li!nes de coupe sont d@inies de
telle sorte qu'elles passent au centre de
l'c"antillon7 une selon la direction $
RerticaleS et la seconde selon la direction
= R"ori3ontaleSC Les aleurs relees le
lon! de ces li!nes de coupe sont les
indicateurs de plasticit du mcanisme
plastique "
2
m
du mod4le de (u%euxC ,l
s'a!it nanmoins d'un c"amp aux noeudsC
Ce c"amp est issu d'une extrapolation des
points de Gauss aux nbudsC Cette
premi4re tape entraQne ncessairement
une perte de prcision sur les aleurs A
releerC 2e plus7 l'indicateur de plasticit7
arie comme un entier entre & pour l'lasticit7 $ pour la c"ar!e plastique et /$ pour
les dc"ar!es Rexemple illustration :C$9SC La lecture de ce c"amp entraQne donc
des approximations sur les aleurs relees pour la comparaison aux solutions
analytiquesC La lar!eur de bande est alue pour tous les nbuds suiant la li!ne
de coupe d@inie dans l'c"antillon pour des aleurs d'indice plastique suprieures A
&79C La correction A apporter aux rsultats doit int!rer une au!mentation des
lar!eurs de bande !ale A la lar!eur d'un lment @iniC -n e@@et7 le passa!e entre les
3ones lastiques et plastiques est tou%ours concentr sur un lmentC
Les an!les d'orientation des bandes de cisaillement sont @inalement tablis A partir
des aleurs de lon!ueur caractristique relees "ori3ontalement et erticalementC
6.5.5.1 Rsultats o3tenus a1ec le modle #CC
L'ob%et de cette section consiste A prsenter la dmarc"e mise en place pour
aluer la pertinence de l'exemple analytique de la couc"e cisaille RY:CHC$ S et A
d@inir les param4tres in@luen0ant la lar!eur de la bande de cisaillement dans le
cadre de simulations numriques d'essais biaxiaux drainsC Cette dmarc"e est
Illustration &.11 : Indicateur de plasticit
sui5ant une coupe sur un c-antillon lors
d'un essai bia9ial
: Application de la t"orie du second !radient de dilatation $99
mene suiant les points suiants :
Jaluer et ri@ier la dpendance de la lar!eur de la bande de cisaillement A
la racine du module de ri!idit R
.
b
s
S [
-xtraire des simulations numriques la aleur du coe@@icient7 @onction des
tats de contraintes et proprits matriaux7 port deant la @onction en
.
b
s
dont dpend la lar!eur de la bande de cisaillement7 not par la suite
F ( #
0
, #
c!
)
[
Comparer la aleur de
F ( #
0
, #
c!
)
issue des simulations numriques au
coe@@icient obtenu ia la solution analytique tablie A l'quation :C== du
Y:CHC$C# [
Au point de bi@urcation Rtransition lastique<plastiqueS7 e@@ectuer une rotation
des composantes du tenseur de c dans le rep4re local de la couc"e
cisaille potentielle analo!ue au probl4me analytique :
Jaluer le tenseur de ri!idit H pour cet tat de contrainte local [
Jtablir les secteurs d'an!le susceptibles de produire une perturbation
priodique au c"amp de solutions "omo!4nes [
Calculer la aleur de
F ( #
0
, #
c!
)
analytique pour les an!les
d'inclinaison concerns [
Comparer les aleurs analytiques A celles issues des simulations
numriquesC
Les rsultats prsents ci/dessous ont t obtenus aec le mod4le (CC Rprsent
au Y:C9C#C$ SC Ce mod4le d!rad nous permet de limiter les temps C+U des
simulations sans nuire A la portabilit des rsultats obtenus au mod4le de (u%eux
completC
La premi4re partie de la campa!ne d'essais a consist A caractriser l'olution de
la lar!eur de la bande de cisaillement en @onction du module lastique de ri!idit du
mod4le de second !radient
b
s
Roir quation :C$FSC 2ans le but d'obtenir une lar!e
!amme de aleurs7 quatre !omtries di@@rentes ont t utilises aec7 pour
c"acune d'elle7 un nombre d'lments @inis constantC Les @acteurs d'c"elle utiliss
taient !aux A $7 #7 9 et $& par rapport A la con@i!uration initiale de l'c"antillon de
$& cm de lar!e sur #& cm de "autC Les dimensions des c"antillons et les
caractristiques des mailla!es sont reportes dans le tableau :C# :
N!m 5!mtrie
H&ter . L&r5er
Nm . mO
#ment 2ini
@EFB
Dimensi!ns EF
@H . LB Nm . mO
N!m%re t!t&#
*8#ments
Finis
Jc"antillon x$ &7# x &7$
]UA28
&7&&F#9 x &7&&F#9
9$#
R=# x $FS
Jc"antillon x# &7H x &7# &7&$#9 x &7&$#9
Jc"antillon x9 $ x &79 &7&=$#9 x &7&=$#9
Jc"antillon x$& # x $ &7&F#9 x &7&F#9
T&%#e& C-/ $ C&r&ctristi3es 5!mtri3es *es *i22rents c7&nti##!ns ti#i"
ss *r&nt #& c&m0&5ne *8ess&is nmri3es
$9F :C9 Jtude numrique d'un essai biaxial drain
Les !ammes de aleurs utilises pour le module
b
s
associes A c"aque mailla!e
ont t tablies A partir des premi4res aleurs obtenues aant le dbut de la
campa!ne ma%eure d'essais numriquesC C"aque interalle de aleurs se recoupe
sur deux aleurs du module
b
s
pour s'assurer de la continuit des aleurs
releesC
Les premiers rsultats obtenus par la mt"ode des lments @inis ont con@irm une
dpendance en
.
b
s
de la lar!eur de la bande pour l'ensemble des essaisC +our
une pression isotrope de !00k#+ et une pression de consolidation de
#
c!
=4 "#+ 7 les rsultats sont prsents sur l'illustration :C$FC Les rsultats
lments @inis sont relatiement proc"es des solutions @ournies par l'quation
analytique :C== RY:CHC$C# S mal!r une prcision ariable7 @onction de la qualit des
interalles de aleurs du module
b
s
pour le mailla!e utilisC
La campa!ne d'essais numriques qui suit consiste A @aire arier la pression initiale
de l'c"antillon #
0
7 puis A @aire arier la pression de consolidation critique du
mod4le7 #
c!
7 pour un second type d'essaisC -n e@@et7 la dpendance des
composantes du tenseur
H
ep
en @onction de #
0
et #
c!
ne peut pas s'crire
directementC Tous les essais raliss sont nanmoins restreints A des matriaux
dilatantsC Ces campa!nes d'essais ont montr une dpendance non linaire de la
lar!eur de la bande aux proprits initiales du matriauC -n admettant une relation
du type l
c
=
.
b
s
F( #
0
, #
c!
) 7 aec l
c
la lar!eur de bande7 les rsultats
numriques d'olution de la @onction F( #
0
, #
c!
) sont prsents sur l'illustration
:C$:C
Illustration &.1B : (5olution de la largeur de la bande de localisation en fonction de b
s
pour
#
c!
=4 "#+ et #
0
=!00 k#+ a5ec le mod$le :++
: Application de la t"orie du second !radient de dilatation $9:
Sur l'axe des abscisses sont reportes les aleurs du rapport #
c!
/ # au pic de
contraintes atteint lors de l'essai biaxial drain pour les di@@rents essais ralissC La
aleur de la pression isotrope # dans le plan k considr est obtenue A partir
de la relation non linaire suiante :
f
k
=q
k
+"#
(
1ln
(
#
#
c!
))
=0 tel q'e
# =
c
ii
+c
jj
2
q
k
=
c
ii
c
jj
2
c
ii
= #
0
= cste
R:CH9S
Les tats de contraintes tablis ia la relation :CH9 sont reprsents dans le plan
( p
k
, q
k
) sur l'illustration :C$8 pour les campa!nes d'essais ralissC
Illustration &.1& : (5olution de la fonction F( #
0
, #
c!
) en fonction de #
c!
/ # obtenue par
la mt-ode des lments finis
Illustration &.10 : Paleurs des contraintes testes pour l'ensemble des sries de simulations
numri)ues a5ec le mod$le :++
$98 :C9 Jtude numrique d'un essai biaxial drain
La courbe bleue aec des symboles carrs apparaissant sur l'illustration :C$:
reprend les rsultats obtenus pour une pression isotrope initiale constante7
#
0
=!00 k#+
C Les pressions de con@inement initiales7
#
c!
7 arient entre les
aleurs de 2,1 "#+ et 16 "#+ C Les tats de contraintes tests sont
reprsents sur l'illustration :C$8 dans le plan
( p
k
, q
k
)
par des ronds rou!esC Les
rsultats de l'illustration :C$: montrent une dpendance non linaire tr4s marque
de la @onction F( # , #
c!
) par rapport A #
c!
/ # 7 aec # la aleur de pression
isotrope applique au point de bi@urcation tudi7 quialent au pic de contraintes
obtenu durant les essais biaxiauxC
La courbe rou!e aec des symboles ronds de l'illustration :C$: reprend les rsultats
obtenus pour une pression critique initiale constante7
#
c!
=(MPa
C Les pressions
de con@inement initial #
0
7 arient entre les aleurs de 2!0 kPa et 2 MPa C Les
tats de contraintes tests sont reprsents sur l'illustration :C$8 dans le plan
( p
k
, q
k
)
par des losan!es rosesC Les rsultats montrent pour cette campa!ne
dans l'interalle de aleurs testes une dpendance quasi/linaire sur un lar!e
domaine de la @onction F( # , #
c!
) par rapport au quotient #
c!
/ # Rillustration
:C$:SC
2e mBme sur l'illustration :C$8 Rcarrs bleusS7 on retroue les tra%ets de c"ar!ement
suiis pour une autre pression de con@inement critique7
#
c!
=4 MPa
et dont les
rsultats sont prsents par la courbe noire aec des symboles en losan!e sur
l'illustration :C$:C L'interalle de aleurs pour la pression isotrope initiale a t c"oisi
entre 300 kPa et 1MPa C Les rsultats prsentent un comportement similaire A
la deuxi4me campa!ne d'essais7 A saoir une dpendance quasi/linaire de
F( # , #
c!
) sur le domaine d'tudesC
+ar la suite7 la problmatique porte sur les capacits du mod4le analytique prsent
au Y:CHC$ 7 soumis A un c"ar!ement mixte de cisaillement et de compression7 A
%usti@ier les rsultats obtenus aec le lo!iciel par lments @inis CodeTAsterC
2i@@rentes procdures ont t deloppes pour raliser les mBmes campa!nes
d'essais que celles prsentes ci/dessusC
La procdure7 implante sous Matlab7 calcule7 pour un tat initial donn des
contraintes et ariables internes7 la aleur de A Rdiscriminant de l'quation
caractristique :C#; du Y:CHC$C# S pour di@@rentes orientations de la bande de
cisaillementC L'criture explicite des composantes du tenseur de ri!idit pour le
mod4le (CC est prsente en annexe ;C$$ C
Une rotation de la bande de cisaillement d'un an!le 0 implique une rotation locale
applique aux composantes du tenseur des contraintesC -lle permet d'estimer les
nouelles composantes du tenseur constituti@ local du mod4le de comportement
classique7 portant sur le premier !radient des dplacementsC
: Application de la t"orie du second !radient de dilatation $9;
Les premi4res comparaisons sont
menes sur la campa!ne d'essais A
#
0
constant7 #
0
=!00 k#+ C Les
rsultats7 isibles sur l'illustration :C#$a7
ont montr qu'un interalle de aleurs
d'an!le d'inclinaison des bandes de
cisaillement satis@ait le crit4re A0 7
quialent A l'apparition de solutions
oscillantes au probl4me traitC Les
bornes de cet interalle oluent en
@onction de l'tat de contraintes au picC
-n ralisant une coupe A di@@rents
an!les du rep4re local7 on constate une
aleur stable de A pour une lar!e
!amme des aleurs testes A l'an!le
0=40 de!rs Rillustration :C#& A partir
de l'illustration :C#$aSC
C"ambon et Moullet R#&&HS prcisent notamment que l'existence d'un interalle de
aleurs d'an!les d'orientation est due A la discontinuit de la pente de la courbe de
contraintes/d@ormations7 correspondant au pic des contraintes diatoires pour le
mod4le (CCC +our cet tat de contraintes donn7 il existe donc une in@init de
solutions pour l'orientation de la bande de cisaillementC
Illustration &.1" : 2otation du tenseur des contraintes locales
Illustration &.2!: Paleurs de
bA=
H
1111
H
1212
H
1112
H
1211
H
1212
pour la
srie #
0
constant pour diffrentes
orientations du rep$re local a5ec le mod$le
:++
$F& :C9 Jtude numrique d'un essai biaxial drain
,l est toute@ois intressant de comparer les aleurs limites de l'an!le d'inclinaison de
la bande de cisaillement aec les aleurs obtenues par le crit4re de 'ice Rc@
YFC9CHC#C$ SC Les aleurs limites sont obtenues A partir des conditions d'apparition de
solutions oscillantes au probl4me analytiqueC Les directions de bi@urcations en
mode suppos de bandes de cisaillement sont obtenues A partir du si!ne du
dterminant du tenseur acoustique7 et (nHn)0 7 tablies suiant le crit4re de
'ice Rc@ Annexe ;C$# et illustration :C#$bSC Les composantes du tenseur H sont
alues A partir de l'tat de contraintes de la solution @ondamentale "omo!4neC
Les directions n
1
et n
2
obtenues A partir du crit4re de 'ice sont A l'intrieur strict
du domaine des an!les limites d@inis par la condition A0 C
Le c"oix de l'an!le d'inclinaison local de la bande de cisaillement7 ncessaire pour
raliser une comparaison qualitatie et quantitatie des rsultats analytiques aux
rsultats obtenus par lments @inis7 a tout d'abord t @ait pour c"aque essai
suiant un crit4re retenant le minimum de la aleur de
(o
2
) =
H
1111
H
1212
H
1112
H
1211
b
s
H
1212
7 assurant ainsi la lon!ueur d'onde la plus courte
des solutions oscillantes l
c
=
2n
o
C
-n ralisant une approc"e inerse du probl4me7 on peut rec"erc"er les aleurs de
A assurant une di@@rence minimum de F( #
0
, #
c!
) aec les aleurs relees A
partir du mod4le par lments @inis Rex : illustrations :C##a et :C##bSC Ainsi7 on peut
obtenir la aleur de l'an!le d'inclinaison de la bandeC
Sur les illustrations :C##a et :C##b @i!urent !alement deux autres approc"esC La
premi4re d@init l'an!le d'inclinaison c"oisi pour la bande de cisaillement comme
!al A la mdiane de l'interalle des an!les d'inclinaison obtenus Roir illustration
:C#$aSC La seconde approc"e calcule l'an!le d'inclinaison de la bande comme le
barycentre de la @onction A sur l'interalle an!ulaire considr Rillustration :C#$aSC
Illustration &.21 : a) (5olution de A en fonction de l'angle d'inclinaison de la bande de
localisation pour diffrentes 5aleurs de pression criti)ue de confinement #
c!
et
#
0
=!00 k#+ ; b) (5olution des angles d'inclinaison limites et des directions de 2ice en
fonction de #
c!
/ #
: Application de la t"orie du second !radient de dilatation $F$
Les rsultats pour le probl4me inerse7 A saoir dterminer l'an!le d'inclinaison
N optimum O minimisant l'erreur aec les rsultats des lments @inis7 mettent en
aant un an!le d'inclinaison de la bande de cisaillement ariable entre l'an!le
minimisant la aleur de A et la aleur de l'an!le barycentre de la @onction A C
L'an!le d'inclinaison de la bande arie pour cette campa!ne d'essais7 d'apr4s
l'approc"e analytique7 entre =: de!rs et H# de!rsC
L'illustration :C##b prsente le rapport entre la solution obtenue A partir des mod4les
par lments @inis et les di@@rentes approc"es analytiques prsentes ci/dessusC
Une concordance par@aite entre le mod4le analytique et les rsultats numriques
conduit A une aleur unitaire du rapport
F ( #
0
, #
c!
)/(b
s
o)
C
Les rsultats sont relatiement prcis et permettent d'estimer par l'approc"e
analytique7 A seulement $&W d'erreur maximum7 la aleur de F( # , #
c!
) 7 si l'on
n!li!e le dernier point obtenu aec la mt"ode des lments @inis7 pour un rapport
de #
c!
/ #-2,0! C L'cart des solutions par lments @inis et celles obtenues aec
le crit4re de 'ice est relatiement important Ri=&WS mais prsente un pro@il tr4s
stableC La di@@rence est uniquement quantitatieC
Les carts relati@s constats entre les deux
approc"es peuent Btre relis aux incertitudes
sur les aleurs numriques releesC -n e@@et7
la dtermination de F( # , #
c!
) est le rsultat
d'une approximation pour un tat initial
( #
0
, #
c!
)
associ aux multiples essais
numriques raliss oZ les param4tres
oluant sont le module
b
s
et les dimensions
!omtriques de l'c"antillonC L'illustration :C#=
reprsente l'olution du coe@@icient de
r!ression tabli A partir d'une mt"ode des
moindres carrs entre les aleurs relees
numriquement et la @onction t"orique
l
c
=F ( # , #
c!
)
.
b
s
C -n comparant les
rsultats des illustrations :C##b et :C#=7 on note
Illustration &.22 : a) (5olution de l'angle d'inclinaison de la bande en fonction de #
c!
/ #
(gauc-e) ; b) (5olution du rapport entre la solution lments finis et les solutions anal>ti)ues
en fonction de #
c!
/ # F / o (droite) ; #
0
=!00 k#+
Illustration &.2' : (5olution du
coefficient de rgression entre
l'approc-e anal>ti)ue et les rsultats
numri)ues en fonction du rapport
#
c!
/ #
$F# :C9 Jtude numrique d'un essai biaxial drain
que l'erreur obtenue entre
F ( #
0
, #
c!
)
et
(b
s
o)
est lie A la baisse de
prcision des rsultats numriques relesC
Le mBme processus peut Btre ralis pour la campa!ne d'essais A #
c!
constant et
#
0
ariantC Les rsultats en terme d'inclinaison des bandes de cisaillement et les
erreurs sont similaires A la campa!ne d'essais prcdemment tudie Rillustrations
:C#H et :C#9SC
,l est !alement possible de ri@ier que les
an!les d'inclinaison des bandes de
localisation obtenus par la mt"ode inerse
correspondent e@@ectiement aux aleurs
d'an!les obtenues aec le lo!iciel par
lments @inisC L'illustration :C#F est issue
d'un calcul ralis pour les campa!nes
d'essais prsentes ci/dessusC On obsere
une ariation de l'an!le d'inclinaison de la
bande entre l'initiation A deux bandes de
localisation et le passa!e A une bande
unique de localisationC Les aleurs relees
Illustration &.2* :a) (5olution des angles d'inclinaison limites et des directions de 2ice en fonction
de #
c!
/ # pour # )ui 5arie ; b) (5olution des angles d'inclinaison de la bande en fonction de
#
c!
/ # ; c) (5olution du rapport entre la solution par lments finis et les solutions anal>ti)ues
en fonction de #
c!
/ # ; #
c!
=cste=4 "#+
Illustration &.2B : +arte d'iso5aleurs de
l'indicateur de plasticit "
2
m
pour un
essai bia9ial E #
0
=!00 k#+ et
#
c!
=( "#+ pour U
-
=0,4cm
a5ec le mod$le :++
Illustration &.21 : a) (5olution des angles d'inclinaison limites et des directions de 2ice fonction de
#
c!
/ # ; b) (5olution des angles d'inclinaison de la bande en fonction de #
c!
/ # ; c) (5olution
du rapport entre la solution par lments finis et les solutions anal>ti)ues en fonction de #
c!
/ # ;
#
c!
=cste=( "#+
: Application de la t"orie du second !radient de dilatation $F=
sur l'ima!e permettent d'tablir une ariation d'un an!le d'inclinaison de =8 de!rs A
H= de!rs7 aleurs comprises dans l'interalle rele par l'approc"e analytiqueC La
aleur de l'an!le d'inclinaison A =8 de!rs est tr4s proc"e de la aleur obtenue par
l'approc"e de rec"erc"e de l'optimum Rillustration :C##aSC La bande de cisaillement
en c"ar!e sur l'illustration :C#F n'est pas un rsultat prdominantC Sur l'ensemble
des tudes menes7 le passa!e du mode de d@ormations de deux bandes A une
bande de cisaillement donne alatoirement une des deux bandes initialesC
-n reprenant l'illustration :C$:7 on peut A prsent comparer les rsultats analytiques
A ceux obtenus par le lo!iciel par lments @inis sur un mBme !rap"ique pour les
trois campa!nes d'essais Rillustration :C#:SC Les rsultats obtenus sont tr4s
encoura!eants et montrent une concordance tr4s probante de l'approc"e analytique
aec l'approc"e par lments @inisC L'approc"e analytique a permis d'isoler une tr4s
!rande partie des quantits interenant dans la dtermination des lar!eurs de
bande de cisaillementC
Ce traail a permis de %usti@ier les rsultats numriques obtenus A partir d'un mod4le
analytique pour une !rande arit de aleurs testesC Le coupla!e entre ce mod4le
de comportement R(CCS et le mod4le de second !radient de dilatation peut donc
Btre maQtris A partir d'un probl4me analytique pour ce c"emin de c"ar!ementC 2e
plus7 il peut permettre de @ixer une lar!eur de bande initiale co"rente aec la
discrtisation spatiale utilise dans la 3one de sollicitationsC
La proc"aine tape de ce traail consiste A extrapoler ces rsultats au mod4le de
comportement de (u%eux complet et A ri@ier la concordance des rsultats entre
l'approc"e analytique et l'approc"e numrique par lments @inisC
6.5.5.2 :xtension des rsultats aux autres modles constitutis
L'extension des rsultats aux mod4les de (u%eux ncessite de prendre en compte
Illustration &.2& : (5olution de la fonction F( #
0
, #
c!
) en fonction de #
c!
/ # pour les
approc-es anal>ti)ue et par lments finis a5ec le mod$le :++
$FH :C9 Jtude numrique d'un essai biaxial drain
l'crouissa!e isotrope des sur@aces de c"ar!e diatoire des mod4lesC
L'crouissa!e a !alement un e@@et sur l'olution de la d@ormation olumique
plastique cumuleC Cette remarque s'applique A la @ois pour les mod4les (?S et
(u%eux complet RY:C9C# SC L'ensemble des rsultats analytiques prsents dans ce
para!rap"e sont communs aux mod4les (?S et (u%eux complet7 sau@ mention
contraireC
La coner!ence numrique est relee pour l'ensemble des calculs mens aec les
mod4les (?S et (u%eux A j
t)l
10
3
pour rduire les temps de calculs pour la
ralisation des di@@rentes simulations e@@ectuesC On notera par la suite une perte
de prcision sur les !randeurs obtenues ia ces simulations7 mais tr4s peu de
ariation sur les e@@ets apports par la prise en compte des milieux du second
!radient de dilatationC
+our ces mod4les7 la dmarc"e
mene prcdemment RY:C9C9C$ S
n'est plus applicable directement
dans son ensembleC +our c"aque
incrment de contraintes erticales
imposes7 le seuil plastique du
mod4le doit Btre quilibr suiant
les olutions des ariables
internesC +our c"aque incrment7 le
tenseur de ri!idit lasto/plastique
est donc modi@iC -n se @ixant une
aleur pour la lar!eur de la 3one
d'in@luence pour les calculs par
lments @inis R@ixe pour l'exemple
A
l
c
=0,04m
S7 on obtient une
olution de la aleur du module
lastique de ri!idit du second
!radient
b
s
C
L'olution du module
b
s
est prsente sur l'illustration :C#87 pour une !amme de
aleurs des contraintes latrales
c
3
comprises entre 100 k#+ et 1 "#+ 7
en @onction du ratio
(=c
1
/ c
3
C C"aque courbe relatie A un taux de con@inement
donn prsente trois p"ases distinctes pour cet interalle de aleursC La premi4re
p"ase ne rel4e aucune direction matrielle instable R (2,! 7 co"rent aec les
rsultats tablis au Y:C9C=C#C# SC Les aleurs du module
b
s
sont alors nullesC La
seconde p"ase prsente une olution tr4s rapide pour le module
b
s
marque
ensuite par un picC La troisi4me p"ase correspond A la p"ase descendante de
l'olution du module
b
s
au @ur et A mesure que le matriau se plasti@ieC La @in de
la troisi4me tape correspond A un minimum local pour le module
b
s
Rnomme
N aleur palier O par la suiteSC Les derni4res aleurs illustres de
b
s
pour c"aque
contrainte latrale correspondent aux N demandes O du mod4le aant la p"ase
d'adoucissement du matriauC
-n complment de l'illustration :C#87 l'olution de
b
s
pour les di@@rentes aleurs
de
c
3
est prsente en @onction du rapport
#
c
/ #
sur l'illustration :C#;C L'axe des
abscisses est prsent sous une c"elle lo!arit"mique pour @aciliter la lecture des
rsultatsC
Illustration &.20 : (5olution de b
s
en fonction de
(=c
1
/ c
3
pour c
3
5ariant de 100 k#+
E 1 "#+ a5ec l
c
=0,04m pour le sable
d':ostun E D%=((% et le mod$le :J4
: Application de la t"orie du second !radient de dilatation $F9
,l @aut A prsent s'intresser A deux points distincts suite A ces rsultatsC
La premi4re question est relatie A l'olution de
b
s
par rapport aux contraintes
latrales appliques7
c
3
C La aleur maximale de
b
s
Raleur au picS ne suit pas
une olution monotone en @onction de
c
3
7 A la di@@rence des aleurs en @in de
p"ase = qui suient une olution r!uli4re et quasi/linaire en @onction de
c
3
Rillustrations :C=&a et :C=&bSC Les aleurs de
b
s
au pic correspondent A des
nieaux de c"ar!ement oZ la direction axiale de compression n'est pas contenue
dans le cMne d'instabilits matrielles du mod4le de (u%eux Rrsultats du Y:C9C#C= S7
tandis que les aleurs de
b
s
en @in de p"ase = correspondent aux aleurs
ncessaires pour contrMler l'adoucissement du matriau apparaissant en
poursuiant le c"emin de c"ar!ement de l'essai biaxial drainC
On peut nanmoins remarquer que l'olution de
b
s
aec le mod4le de (u%eux est
oppose A celle du mod4le (CC pour de @aibles aleurs du rapport
#
c
/ #!
C La
aleur de
b
s
au!mente alors que le matriau est de moins en moins dilatantC
Illustration &.2" : (5olution de b
s
en fonction de #
c
/ # pour c
3
5ariant dans l'inter5alle
|100 k#+,1MPa a5ec l
c
=0,04m pour le sable d':ostun E D%=((% et le
mod$le :J4
$FF :C9 Jtude numrique d'un essai biaxial drain
La seconde question porte sur l'extension de l'approc"e tablie pour le mod4le (CC
au mod4le complet de (u%euxC ,l s'a!it de saoir si l'olution du module
b
s
pour le
sable d'(ostun A D%=((% 7 tablie ci/dessus7 est adapte A celle relee lors de
modlisations par lments @inis d'essais biaxiaux drains aec le mod4le de
(u%euxC
La premi4re tape consiste A raliser un essai biaxial drain sur le sable d'(ostun A
D%=((% pour des contraintes latrales de
c
3
=!00k#+
et
c
3
=1 "#+
7
aleurs contenues dans l'interalle oZ l'olution de
b
s
est quasi/linaire pour les
deux approc"es Rillustration :C=&bSC Les simulations numriques sont menes aec
une discrtisation du c"ar!ement impos
U
-
=0,02mm
C
Les premi4res simulations menes aec
c
3
=!00k#+
ont montr une 3one
d'in@luence plus tendue que celle attendue
pour une aleur de b
s
=1!00 #+;m
2
7
lar!ement suprieure aux dimensions de la
structure considre R 10x 20 cm SC Apr4s
plusieurs tentaties7 la aleur de
b
s
permettant d'obtenir une lar!eur de bandes de
l
c
=0,04m
se situe A b
s
=60 #+;m
2
7 soit un
@acteur de rduction de #9 par rapport aux
prdictions du mod4le analytique Rillustration
:C=# / !auc"eSC Le mod4le analytique ne prend
pas en compte la dimension de coupla!e des
di@@rents mcanismes du mod4le de (u%eux
Rdeux autres mcanismes diatoires "
1
m
et
"
3
m
plus le mcanisme isotropeS7 qui peut expliquer la di@@rence quantitatie
entre les rsultats analytiques et les rsultats par lments @inisC Les aspects de
coupla!e n'entraient pas en %eu pour le mod4le (CC7 puisqu'un seul mcanisme
plastique tait sollicit durant les essais Rles autres mcanismes restant lastiques
sur ce c"emin de c"ar!ementSC
Illustration &.'! : (5olution de b
s
en fonction de #
c
/ # (gauc-e.a) et de c
3
(droite.b)
pour le sable d':ostun E D%=((% pour le mod$le :J4 et l
c
=0,04m
Illustration &.'1 : (5olution de b
s
rduit en fonction de c
3
pour le
sable d':ostun E D%=((% pour
le mod$le :J4 et l
c
=0,04m
: Application de la t"orie du second !radient de dilatation $F:
Le @acteur de rduction calcul a ensuite t test pour une aleur
c
3
=1 "#+
7
soit b
s
=100 #+;m
2
Rillustration :C=$SC Les rsultats sont tr4s satis@aisants et
prsents sur l'illustration :C=#C La lar!eur d'in@luence
l
c
=0,04m
est considre
acquise si on se r@4re aux rsultats obtenus pour l'indicateur de plasticit R:C=#bSC
La dpendance linaire de
b
s
par rapport A
c
3
a bien t tablie dans l'interalle
1 "#+<c
3
<!00 k#+
pour les calculs par lments @inisC
Illustration &.'2 : +oupe 5erticale dans l'c-antillon pour c
3
=!00 kPa E
U
-
=0,02(m (gauc-e) et c
3
=1MPa E U
-
=0,04m (droite) reprsentant a)
c
v
p
; b) indicateur de plasticit "
2
m
; c) D> en fonction de G>.
$F8 :C9 Jtude numrique d'un essai biaxial drain
L'orientation des bandes de cisaillement calcule analytiquement est !alement en
bon accord aec celle relee lors des simulations par lments @inisC +our
c
3
=1 "#+
7 l'an!le rele lors des simulations est proc"e de
0
11
=43
de!rs
Rillustration :C==S et l'approc"e analytique @ournit un an!le minimum
0
11
=3'
de!rs contenu dans l'interalle
2(0
11
4!
de!rs Rillustration :C==SC Les
indices sous l'an!le d'inclinaison Rex
0
11
S indiquent que la direction initiale
0
11
=0
de!rs est porte par la direction $ Rerticale dans cet exempleSC
La suite des essais consiste A ri@ier si
b
s
suit une olution linaire entre les
aleurs de contraintes latrales
!00 k#+<c
3
<100k#+
7 ou bien si l'olution
de
b
s
ncessaire pour obtenir
l
c
=0,04m
correspond aux rsultats lis au pic de
b
s
Rillustration :C=&SC La simulation ralise montre une lar!eur de bande de
l'ordre de
l
c
-0,0&m
pour b
s
=2! #+;m
2
et
c
3
=100kPa
Rillustration :C=HSC Ce
rsultat con@irme une ariation monotone de
b
s
en @onction de
c
3
sur l'interalle
d'tude
c
3
|1000 ,100 k#+
C La aleur de
b
s
contrMlant la lar!eur de la
bande peut donc Btre c"oisie au point oZ
2
W=0
pour le tra%et de c"ar!ement de
l'essai biaxial drainC L'olution monotone obtenue ia les simulations numriques
est en dsaccord aec l'olution des aleurs de
b
s
relees au pic Rillustration
:C=&SC
Illustration &.'' : (gauc-e.a) Indicateur de plasticit "
2
m
pour c
3
=1 "#+
b
s
=100 #+;m
2
et U
-
=0,016 m pour le mod$le :J4 ; (droite.b) (5olution de o
th
()uation &.2") en fonction de l'inclinaison de la bande de cisaillement
: Application de la t"orie du second !radient de dilatation $F;
Ces rsultats ont t tablis aec le mod4le (?SC Les mBmes tudes sont A prsent
menes pour le mod4le de (u%eux complet et donnent des rsultats similaires A
ceux du mod4le (?S Rillustration :C=HSC
+our ce %eu de param4tres et ce c"emin
de c"ar!ement7 l'in@luence des
mcanismes isotropes est n!li!eable sur
les d@ormations olumiques et la aleur
maximale du diateur de contraintes
comme prcis prcdemment Y:C9C=C#C#
Rillustrations :C97 :CF SC L'illustration :C=9
permet !alement de con@irmer l'e@@et
mineur de la prise en compte du
mcanisme plastique isotrope pour ce %eu
de param4tres sur la rponse !lobale de
l'c"antillon dans le plan
(U
-
, F
-
)
C
Les rsultats tablis ci/dessus doient
!alement Btre tendus A d'autres %eux de
param4tres pour dterminer si la aleur
2! pour le @acteur de rduction est
indpendante des proprits matriauxC
Le matriau suiant test est !alement un sable d'(ostun A D%=40% C
La procdure mise en place pour le sable d'(ostun A D%=((% est A prsent
applique au sable d'(ostun A D%=40% C Les conclusions de ce traail
prsentes en annexe ;C$= montrent une dpendance du @acteur de rduction en
@onction des proprits matriaux c"oisiesC Ce %eu de param4tres montre !alement
des di@@rences entre les mod4les (?S et (u%eux sur le c"emin biaxial drain qui se
rpercutent sur la aleur du coe@@icient de rduction A appliquerC Les aleurs du
coe@@icient de rduction sont @inalement !ales respectiement A !0 et 100 pour
les mod4les (?S et de (u%eux completC
Illustration &.'* : +oupe a9iale centrale reprsentant c
v
p
(gauc-e) et l'indicateur de plasticit
"
2
m
(droite) pour les mod$les :J4 et :u6eu9 pour c
3
=100k#+ ; U
-
=0,016m et
b
s
=2! #+;m
2
Illustration &.'1 : (5olution de la force a9iale
D> en tAte de l'c-antillon pour
c
3
=100kPa et b
s
=2! #+;m
2
pour
les mod$les :J4 et :u6eu9
$:& :C9 Jtude numrique d'un essai biaxial drain
6.5.5.3 Retour sur la procdure mise en place
L'ob%et de cette section consistait A con@ronter l'approc"e analytique d'une couc"e
de sol cisaille aux simulations numriques modlisant un essai biaxial drain pour
dterminer l'olution des aleurs de
b
s
en @onction des tats de contraintes et
proprits matriauxC Cette approc"e a tout d'abord t ralise pour le mod4le
(CC puis tendue aux mod4les (?S et de (u%eux completC
Les rsultats pour le mod4le (CC ont montr une tr4s bonne corrlation entre les
rsultats analytiques et numriques pour la dtermination de la 3one d'in@luence
spatiale
l
c
7 lie A l'a%out des termes de second !radient de dilatationC
+our les mod4les (?S et de (u%eux complet7 les rsultats sont apparus co"rents A
l'approc"e analytique A un @acteur de rduction pr4s li aux coulements plastiques
produits par les autres mcanismes du mod4leC La aleur du @acteur de rduction
est au%ourd'"ui tablie par essais/erreurs pour les param4tres matriau testsC Les
aleurs @ournies par l'approc"e analytique constituent pour le mod4le de (u%eux une
aleur suprieure7 qui suient une olution identique A celles relees lors des
simulations numriquesC
La procdure suiie pour tablir les aleurs du module de ri!idit
b
s
en @onction de
la aleur cible
l
c
consiste A :
raliser l'int!ration numrique du mod4le de (u%eux le lon! du c"emin de
c"ar!ement "omo!4ne de l'essai biaxial drain [
pour tous les nieaux de c"ar!ement7 appliquer une rotation compl4te des
composantes du tenseur des contraintes dans le but de construire
l'oprateur tan!ent continu en @onction de ces nouelles composantes [
tablir les directions potentielles d'apparition de bandes de cisaillement au
re!ard des solutions du probl4me en itesse analytique prsent au Y:CHC$ [
extraire la aleur du module de ri!idit
b
s
quialent A la aleur de
l
c
@ixe7 b
s
=
(
l
c
/ F ( #
0,
#
c!
)
)
2
[
le @acteur de rduction est obtenu par essais/erreurs7 sac"ant que
l
c
est
@onction de
.
b
s
C
Les sections suiantes dmontrent que la prise en compte des milieux de second
!radient de dilatation permet de traailler aec un outil de modlisation indpendant
de la discrtisation spatio/temporelle pour des mod4les de comportement
produisant une d@ormation olumiqueC
C-:-< In*0en*&nce *es rs#t&ts &. m&i##&5es
Les simulations ralises prcdemment RY:C9C9 S pour cet essai biaxial drain ont
permis de dmontrer que le mod4le analytique de la couc"e de sol cisaille propos
par C"ambon et alC R#&&$S permettait de contrMler la 3one r!ularise d'une couc"e
de sol modlise aec le mod4le de (u%euxC Cette approc"e t"orique a montr des
rsultats tr4s conaincants en @onction des proprits matriaux et des tats de
contraintes initiales pour l'application A un essai biaxial drainC Ce para!rap"e
s'intresse A prsent A re!arder l'indpendance des rsultats aux mailla!esC
: Application de la t"orie du second !radient de dilatation $:$
L'indpendance des rsultats aux mailla!es est contrMle suiant plusieurs crit4res7
dont le comportement !lobal de la structure Rre!ard port sur la courbe
@orce<dplacement en tBte de l'c"antillonS7 l'tat de la d@ormation olumique
plastique dans la structure et des indicateurs de plasticitC
+our une !omtrie donne prsente A l'illustration :C=7 trois mailla!es ont t
considrs et sont prsents sur l'illustration :C=FC Les deux premiers mailla!es sont
r!uliers et composs de quadrilat4res R9$# ]UA28 et #&H8 ]UA28SC Le troisi4me
mailla!e7 le plus @in7 est compos de trian!les7 dans son ensemble7 sau@ sur la 3one
endomma!e RF988 T',AF et FH ]UA28SC Cette 3one7 d@inie par des proprits
matriaux di@@rentes Rrduction de !% de
#
c!
S7 est A dimension constante
pour les trois mailla!es tudisC
Les modlisations sont menes sur des lments quadratiques aec int!ration
slectie pour les mailla!es r!uliers composs exclusiement de ]UA28
Rmodlisation 2T+LA*TS, de CodeTAsterSC La modlisation ralise aec le
mailla!e le plus @in est ralise suiant une int!ration normale R2T+LA*S due A la
prsence d'lments trian!ulairesC Les simulations numriques sont menes aec
une discrtisation du c"ar!ement impos
U
-
=0,02mm
C
Les rsultats obtenus pour une pression de con@inement initiale de
c
3
=300 kPa
7
aec une aleur de b
s
=4! #+;m
2
7 aec le mod4le (?S pour le sable d'(ostun A
D%=((% 7 sont prsents sur les illustrations :C=: et :C=8C L'indpendance des
rsultats est retroue pour la courbe du comportement !lobal de la structure7 ainsi
que pour les d@ormations olumiques plastiquesC
Les rsultats relati@s au comportement !lobal sont identiques pour les trois
mailla!es utilissC ,ls restent indpendants des mailla!es utiliss sur toute la !amme
de c"ar!ement7 mBme dans la partie adoucissante du comportement Rillustration
:C=:aSC
Illustration &.'B : 3aillages utiliss pour la modlisation d'un essai bia9ial : a) gauc-e '2BB ddls .
3112 ; b) centre 12B&* ddls . 32!*0 ; c) droite 2&10B ddls . 3/%C/
$:# :C9 Jtude numrique d'un essai biaxial drain
L'utilisation d'une cinmatique enric"ie doit !alement assurer une indpendance
des rsultats A l'c"elle locale de la structureC Les illustrations :C=:b et :C=8
prsentent la rpartition des indicateurs de plasticit et de la d@ormation olumique
plastique pour les di@@rents mailla!esC Les lar!eurs de bandes apparaissent
constantes en @onction des mailla!es ainsi que l'amplitude des aleurs de c
v
p
Rillustration :C=:bS7 aec nanmoins une di@@rence sensible sur le mailla!e
intermdiaire A #&H8 lmentsC La prise en compte de la cinmatique enric"ie type
second !radient de dilatation ne restaure pas l'unicit des solutions du probl4me
pos7 mais assure de contrMler l'ner!ie dissipe durant la p"ase de N post/
localisation O de la structure et une lar!eur de bande indpendante de la
discrtisation spatialeC 2i@@rents pro@ils de rupture sont apparus au cours des
simulations ralisesC
L'ensemble des pro@ils de simulation sont !alement retrous exprimentalement
par 2esrues et 1i!!iani R#&&HS pour des essais biaxiaux drains aec un
lancement de l'c"antillon !al A #C
Illustration &.'& : (gauc-e = a) 2ponse globale dans le plan force dplacement de
l'c-antillon et (droite = b) Lrofil de c
v
p
fonction de la -auteur pour un essai bia9ial drain
sur sable d':ostun E D%=((% c
3
=300 k#+ U
-
=4 cm et b
s
=4!Pa,m
2
Illustration &.'0 : Indicateur de plasticit "
2
m
apr$s U
-
=3,2cm lors d'un essai bia9ial
drain sur sable d':ostun E D%=((% c
3
=300 k#+ et b
s
=4!Pa,m
2
sur les trois
maillages
: Application de la t"orie du second !radient de dilatation $:=
C-:-C In2#ence *e #& *iscrtis&ti!n * c7&r5ement sr #es rs#t&ts
Les rsultats prsents dans cette
section sont tous tablis sur le
mailla!e M9$# Rillustration :C=FaSC Le
param4tre ariant entre les
di@@rentes simulations est le pas de
c"ar!ement appliquC L'ensemble
des essais raliss se distin!uent
selon les deux ariantes du mod4le
de (u%eux utilisesC Les premi4res
simulations ont t menes sur le
mod4le (CC et les secondes sur le
mod4le (?SC Les param4tres
matriaux utiliss sont ceux qui ont
t prsents dans le tableau :C$C
Les simulations menes aec le
mod4le (CC se di@@rencient selon
trois pas de c"ar!ementC Les
incrments de dplacement axial
imposs A c"aque pas de c"ar!ement prennent les aleurs de
U
-
=| 0,4mm< 0,1mm< 0,02 mm
C Les rponses reprsentaties du
comportement !lobal de ces simulations sont similaires tant pour les 3ones
maintenues en c"ar!e durant la p"ase d'adoucissement Rillustration :CH&7 la aleur $
indiquant que le mcanisme diatoire est en c"ar!eS que la @orce relee en tBte
de l'c"antillon Rillustration :C=;SC
Les rponses en tBte d'c"antillon7 obtenues aec le mod4le (?S7 pour trois
nieaux de discrtisation de c"ar!ement di@@rents
U
-
=| 0,0(mm< 0,04mm< 0,02 mm
7 sont prsentes sur l'illustration :CH$ et
apparaissent quasi/identiques dans le plan @orce/dplacementC +our la d@ormation
olumique plastique7 les rsultats sont quialents en aleurs dans les bandes de
cisaillementC Ces bandes ont nanmoins une position di@@rente dans l'c"antillon en
@onction de la discrtisation du c"ar!ement appliquC
Illustration &.'" : 2ponse globale d'un essai
bia9ial pour c
3
=1MPa et
b
s
=!400 Pa,m
2
. Indpendance de la
solution par rapport au pas de c-argement dans
sa partie adoucissante
Illustration &.*! : Indicateur de plasticit "
2
m
apr$s U
-
=3,2mm de dplacement
impos : a)(gauc-e) U
-
=0,4mm ; b)(centre) U
-
=0,1mm ; c)(droite)
U
-
=0,02mm a5ec c
3
=1MPa et b
s
=!400 Pa,m
2
pour le mod$le :++
$:H :C9 Jtude numrique d'un essai biaxial drain
Les trois rponses s'loi!nent de la rponse "omo!4ne de la structure aant
d'atteindre le pic de contraintes et la @orce axiale applique en tBte de l'c"antillon
c"ute brutalement pour une aleur du param4tre de contrMle identique selon les
trois discrtisationsC -n reanc"e7 les modes de ruine associs A ces trois nieaux
de discrtisation N temporelle O sont di@@rents Rillustrations :CH$b et :CH#SC Les
lar!eurs de bandes de cisaillement restent nanmoins constantes et assurent une
indpendance N spatio/temporelle O des rsultats de simulationsC On peut alors
distin!uer deux modes de ruine symtriques et un mode supplmentaire7 insensible
A la prsence de l'imper@ection locale introduite au centre de l'c"antillonC
Illustration &.*2 : Indicateur de plasticit "
2
m
apr$s U
-
=4 cm de dplacement impos
pour le mod$le :J4 : a)(gauc-e) U
-
=0,0(mm ; b)(centre) U
-
=0,04mm ; c)
(droite) U
-
=0,02mm pour c
3
=!00 kPa et b
s
=60 Pa,m
2
Illustration &.*1 : (gauc-e .a) 2ponse en force.dplacement d'un essai bia9ial et (droite =
b )Lrofil de c
v
p
fonction de la -auteur pour c
3
=!00 kPa et b
s
=60 Pa,m
2
pour
diffrentes 5aleurs de discrtisation de c-argement et le mod$le :J4
: Application de la t"orie du second !radient de dilatation $:9
C-:-E ;!#ti!n *e #& #&r5er *es %&n*es *e cis&i##ement & c!rs
* c7&r5ement
Les rsultats tablis prcdemment ont
permis de dmontrer que l'utilisation de
la mt"ode de second !radient de
dilatation est adapte pour traiter le
probl4me de dpendance pat"olo!ique
des rsultats au mailla!e utilis aec le
mod4le de (u%euxC Ce para!rap"e
s'intresse A caractriser l'olution de
la 3one in@luence par la mt"ode de
second !radient de dilatation7 pour le
sable d'(ostun A D%=((% 7
c
3
=300 k#+
et b
s
=4! #+;m
2
C
L'essai biaxial drain est ralis sur le
mailla!e M9$# Rillustration :C=FaS pour
une discrtisation du c"ar!ement
impos !ale A
U
-
=0,02mm
C
L'illustration :CHH prsente pour sept
nieaux de c"ar!ement di@@rents7
U
-
=|1,2< 2,0< 2,4< 3,2< 4,0< 6,4 <(,0 cm
Rcarrs rou!es sur l'illustration :CH=S7
l'olution de la d@ormation olumique plastique cumule le lon! d'une coupe
axiale erticale de l'c"antillonC La 3one d'in@luence atteint une lar!eur maximale sur
l'c"antillon qui se stabilise pour la suite du c"ar!ementC On remarque !alement
que la d@ormation olumique plastique atteint une aleur limite correspondant A
l'tat critique du matriauC L'olution de c
v
p
indique de plus qu'il ne subsiste
qu'une seule 3one en c"ar!e plastique7 puisque qu'apr4s le nieau de c"ar!ement
U
-
=2 cm
7 les olutions plastiques sont nulles en de"ors de la bande de
cisaillementC
Illustration &.** : +oupe 5erticale centrale de la dformation 5olumi)ue plasti)ue cumule
c
v
p
pour un sable d':ostun E D%=((% c
3
=300 k#+ et b
s
=4! #+;m
2
pour le
mod$le :J4
Illustration &.*' : Dorce de raction en tAte de
l'c-antillon au cours d'un essai bia9ial sur
sable d':ostun E D%=((% a5ec
c
3
=300 k#+ et b
s
=4! #+;m
2
pour le
mod$le :J4
$:F :C9 Jtude numrique d'un essai biaxial drain
L'tude de l'indicateur de plasticit locale permet !alement d'apprcier les 3ones
en c"ar!ement plastiques des 3ones en dc"ar!e Rillustration :CH9SC On constate
tout d'abord le rapproc"ement de deux bandes plastiques qui @usionnent en une
3one unique en c"ar!e plastique dans l'c"antillonC La lar!eur de la bande cisaille
maintenue en c"ar!ement au!mente au cours de l'essai biaxial durant la p"ase
d'adoucissement %usqu'A une lar!eur maximale Rillustration :CH9SC Cette isualisation
con@irme les rsultats obsers sur l'illustration :CHH7 oZ les d@ormations
olumiques plastiques se concentrent dans une 3one A lar!eur constanteC
L'orientation de la bande de cisaillement olue au cours du c"ar!ement passant
d'un an!le
0
11
initial de =87: de!rs7 puis H=7H de!rs et en@in HF7# de!rs sur la
!amme de aleurs simules Raleurs relees sur l'illustration :CH9SC
+our l'ensemble des calculs mens A di@@rents taux de con@inement7 le maintien de
cette bande de cisaillement en c"ar!e dans l'c"antillon durant l'int!ralit du
c"ar!ement ne reprsente qu'une solution parmi d'autresC Certains calculs ont
!alement montr la prdominance de la bande symtrique A celle obsere dans
ce calcul7 par exemple Rprsente au Y:C9CF SC
C-:-D R0&rtiti!n *es ner5ies internes
Les rsultats prsents dans cette section7 issus de simulations ralises aec un
mailla!e identique RM9$#7 illustration :C=FaS7 permettent de quanti@ier l'ner!ie de
d@ormation des milieux du second !radient de dilatation relee dans la structure
pour un coupla!e aec le mod4le de (u%euxC Cette ner!ie est calcule
numriquement de @a0on analo!ue A l'ner!ie dissipe t"ermiquement pour un
c"amp de tempraturesC L'expression de cette ner!ie prend la @orme suiante :
W
micr)
=
1
2
|
t
0
t
(
|
D
\c
v
B\ c
v
D
)
t R:CHFS
aec B le tenseur de ri!idit linaire local d@ini en :C$F reliant le tenseur des
doubles @orces 1 au !radient des d@ormations olumiques
\c
v
C
L'ner!ie interne cre par la partie second !radient contribue A assurer une
Illustration &.*1 : Iso5aleurs de l'indicateur de plasticit "
2
m
pour U
-
=2,4cm (gauc-e.a)
U
-
=4,(cm (centre.b) et U
-
=(,0cm (droite.c) pour un sable d':ostun E
D%=((% c
3
=300 k#+ et b
s
=4! #+;m
2
pour le mod$le :J4
: Application de la t"orie du second !radient de dilatation $::
dissipation d'ner!ie interne lors de l'apparition de bandes de cisaillement !nrant
des d@ormations olumiques et conduisant la structure compl4te A sa ruineC
Les essais raliss ont t e@@ectus A des taux de con@inement initiaux di@@rents7
soit
c
3
=| 200kPa ,600kPa ,1MPa
pour les proprits matriaux du mod4le (CC
Rc@ tableau :C$S pour un crasement axial maximum de
U
-
=4 cm
en tBte
d'c"antillonC L'ner!ie de d@ormation obtenue est normalise par la aleur du
traail extrieur W
e,t
Rquation :CH:SC Les aleurs du tenseur de ri!idit linaire du
mod4le de second !radient de dilatation ont t calcules A partir de la procdure
mise en place au Y:C9C9C$ pour des lar!eurs de bandes de cisaillement !ales A
l
c
=| 0,0!m < 0,0(m< 0,1m
C Les aleurs obtenues pour les di@@rents modules de
ri!idit
b
s
sont reportes dans le tableau :C=C
W
e,t
=
|
t
0
t
F
ext
U t R:CH:S
b
s
c
3
=200 kPa c
3
=600 kPa c
3
=1 MPa
l
c
=0,0!m #=&& =8&& 9H&&
l
c
=0,0(m 9;&& ;F&& $=8&&
l
c
=0,10m ;$&& $9&&& #$9&&
T&%#e& C-4 $ >&#ers *e
b
s
@en
Pa,m
2
B !%tenes = 0&rtir *e #& 0r!c*re
*t&i##e & MC-:-:
Les rsultats prsents sur
l'illustration :CHF permettent de
isualiser et quanti@ier l'ner!ie
dissipe par les termes du
second !radient de dilatationC
L'ner!ie est nulle durant la
p"ase de c"ar!ement
lastiqueC Cette ner!ie suit
ensuite une olution
monotone et tend ers une
aleur limite @inieC L'ner!ie
dissipe est relatiement stable
et constante pour les
di@@rentes aleurs de
b
s
c"oisies pour une pression de
con@inement initiale @ixeC
Sur l'illustration :CH:7 on constate que l'ner!ie relatie A la partie de second
!radient norme par W
e,t
est non n!li!eable mais @aible7 in@rieure au % pour
les exemples prsentsC +our l'ensemble des rsultats7 le terme W
micr)
/ W
e,t
est
nul durant la p"ase lastique de comportement du matriauC L'entre en plasticit
Illustration &.*B : (nergie de dformation des milieu9
de second gradient de dilatation e9prime en Joule 7J8
pour le mod$le :++
$:8 :C9 Jtude numrique d'un essai biaxial drain
du matriau coPncide aec une au!mentation rapide du ratio des ner!ies pour
ensuite diminuer ers une aleur rsiduelleC Le pic relati@ de W
micr)
/ W
e,t
au cours
des essais correspond au passa!e du mode de d@ormation "omo!4ne au mode de
d@ormation bi@urqu aec apparition d'une bande de cisaillement Rrapport maximal
in@rieur A 1% SC La diminution du rapport W
micr)
/ W
e,t
s'explique notamment par
le concept d'tat critique int!r dans le mod4le de (u%eux7 surtout sous sa @orme
(CCC Le concept d'tat critique introduit deux p"nom4nes comptiti@sC Le premier
p"nom4ne %oue sur le tenseur lasto/plastique
H
ep
reli A l'crouissa!e du
matriau R h-0 S7 aec pour consquence un lar!issement de la 3one
d'in@luence du second !radient
l
c
C Le second p"nom4ne relati@ A cet tat conduit
A une ariation olumique nulleC Le terme r!ularis se stabilise dans l'quation
d'quilibre du syst4meC Ce second aspect se retroue sur l'illustration :CH: oZ
l'ner!ie interne produite par les termes de second !radient de dilatation deient
n!li!eable deant l'ner!ie apporte par l'extrieur7 lorsque le plateau de plasticit
par@aite est atteint Raleur in@rieure A 1 SC
C-:-,A Pi#&n et 0ers0ecti;es site = #& m!*#is&ti!n *es ess&is
%i&.i&. *r&ins
L'ob%ecti@ de cette section tait de d@inir pour le mod4le lastoplastique de (u%eux
une procdure permettant d'obtenir des rsultats ob%ecti@s par rapport A la
discrtisation spatiale en utilisant le mod4le de second !radient de dilatation en ue
d'applications numriques industrielles sur des oura!es !otec"niquesC L'utilisation
du mod4le de second !radient en complment du mod4le de (u%eux a montr
qu'elle est une solution per@ormante pour raliser des tudes de stabilit sur des
essais biaxiaux drainsC
Le premier aanta!e de cette solution assure d'introduire un minimum d'inconnues
nodales supplmentaires A rsoudre pour assurer l'ob%ectiit des rsultats au
mailla!e7 au @inal consistant A a%outer une unique inconnue nodaleC
Le mod4le de second !radient de dilatation appliqu dans le cadre de cette t"4se
aux matriaux dilatants a dmontr sa capacit A r!ulariser les 3ones de
localisationC L'utilisation du mod4le analytique d'une couc"e de sol cisaille nous a
Illustration &.*& : (nergies de dformation des milieu9 de second gradient de dilatation
W
micr)
normalis par la 5aleur du tra5ail e9trieur W
e,t
pour le mod$le :++
: Application de la t"orie du second !radient de dilatation $:;
par ailleurs permis de maQtriser l'olution de la 3one de localisation en @onction des
param4tres matriaux et des tats de contraintes initiauxC La !rande arit d'tats
de contraintes initiaux des c"antillons et de param4tres matriaux tests assurent
un caract4re !nral A ces conclusionsC Les rsultats numriques prsents ont
!alement permis de quanti@ier l'ner!ie dissipe par la prise en compte des termes
du second !radient de dilatationC Le rapport d'ner!ie entre les termes du second et
du premier !radient des dplacements est relatiement @aible et tend A diminuer au
@ur et A mesure que l'tat du matriau contenu dans les bandes de cisaillement tend
ers l'tat critique du matriauC
*anmoins7 la procdure analytique mise en place pour aider A la dtermination de
la aleur du module de ri!idit
b
s
se restreint au c"emin de c"ar!ement suii lors
d'un essai biaxialC L'extension de la procdure7 mise en place dtaille au Y:C9C9C= 7
doit Btre tendue A tout type de c"emins de c"ar!ementC
La procdure tendue pourrait prendre place apr4s un premier calcul non linaire de
la structure tudie sur un mailla!e relatiement !rossierC L'exprience accumule
sur l'utilisation de ces mod4les nous permet d'enisa!er de prendre en compte
uniquement les aleurs du module
b
s
tablies aux points matriels connaissant
localement un c"ar!ement adoucissant Rtraail du second ordre n!ati@SC
La section suiante prsente un cas d'excaation de talus suii d'un c"ar!ement de
@ondation super@icielle en tBte de talusC Les aleurs utilises pour le module de
ri!idit
b
s
dans le sol seront pour cette tude encore restreintes A l'approc"e
tablie pour les essais biaxiaux drainsC Cet exemple permettra d'estimer les
apports de la r!ularisation de type second !radient de dilatation sur une structure
relatiement commune en !otec"nique tout en !ardant A l'esprit que les aleurs
tablies pour
b
s
ne sont pas optimises par rapport au c"emin de c"ar!ement
suii dans la structureC
$8& :CF Jtude de stabilit d'un dblai
C-< t*e *e st&%i#it *8n *%#&i
C-<-, M!ti;&ti!n
Cette section s'intresse au cas d'tude d'un dblai7 men par (amadi R#&&FS dans
le cadre de sa t"4se7 suii d'un c"ar!ement de @ondation super@icielle en tBte de
talusC 2ans le cadre de son traail7 il a essentiellement re!ard pour ce cas d'tude
constitu de sable lEc"e7 si la condition de (ill permettait de dtecter la rupture
di@@use du talus durant la p"ase d'excaationC La pente du talus tant trop @aible en
comparaison de l'an!le de @rottement du matriau7 la dstabilisation du talus est peu
si!ni@icatie7 mal!r la prsence de l'eau en pied de talusC Le traail men ici
reprend ce cas d'tude suii d'un c"ar!ement de @ondation super@icielle en tBte de
talus pour dstabiliser compl4tement la pente par apparition d'une bande de
cisaillement circulaire dans le talusC La premi4re p"ase consiste A mettre en aant la
dpendance pat"olo!ique des rsultats A la discrtisation spatiale utilise Rc'est A
dire le mailla!eS pour ensuite appliquer la mt"ode de second !radient de dilatation
au domaineC
C-<-/ Prsent&ti!n * 0r!%#+me &. #imites et ses c!n*iti!ns ini"
ti&#es
La !omtrie et les conditions aux limites du probl4me d'excaation sont prsentes
sur l'illustration :CH8C Le probl4me aux limites tudi est un talus d'une "auteur de
2 m aec une pente de 2& de!rsC L'excaation est ralise par enl4ement
successi@ de couc"es de sol de 0,!m C Le sol est modlis aec le mod4le lasto/
plastique de (u%euxC Le massi@ de sol est lui/mBme constitu de deux couc"es de
sable distinctes : en partie pro@onde R | 06 m S7 un sable d'(ostun dense A
D%=((% et en sur@ace R |610 m S7 un sable d'(ostun moyennement dense
A D%=40% C Les param4tres matriaux relati@s A ces deux couc"es de sol sont
prsents dans les tableaux :C$ et ;C:C Les contraintes initiales du massi@ sont
tablies en considrant un coe@@icient de pousse des terres !al A &79C 2urant la
p"ase d'excaation ralise sur une dure de #H"7 la seule @orce olumique
impose est un c"ar!ement de pesanteur diri! selon l'axe ertical Rdirection $SC Les
proprits du milieu poreux manquantes Rpar rapport aux tableaux :C$ et ;C:S sont
donnes dans le tableau :CH:
Illustration &.*0 : <omtrie et conditions au9 limites du talus e9ca5
: Application de la t"orie du second !radient de dilatation $8$
+roprits matriaux
Sable d'(ostun
D%=40%
Sable d'(ostun
D%=((%
j
s
| kg-m
3
#:&& #:&&
j
e
| kg-m
3
$&&& $&&&
) $ $
+
10
3
10
3
K
int
| m
3
-kg-s 10
10
10
14
H
8
| Pa
1
!,10
&
!,10
&
porosit
0,4& 0,4
T&%#e& C-9$ Pr!0rits *es mi#ie. 0!re. 0!r #e c&s *e st&%i#it *e 0ente
L'tude d'excaation est ralise suiant les "ypot"4ses suiantes :
conditions s4c"es Rmodlisation en mcanique pureS pour le sol situ A
"auteur de la 3one excae [
conditions couples "ydro/mcaniques Rla sur@ace libre de pression
"ydraulique est une li!ne "ori3ontale positionne A la cMte de 2 m dans le
sol7 sur@ace libre apr4s excaationS [
Le @lux "ydraulique est nul sur les parois latralesC
Les mailla!es utiliss pour raliser cette tude sont prsents A l'illustration :CH;C Le
mailla!e !rossier est constitu de $;=& lments trian!ulaires pour un total de H&H&
nbudsC Le mailla!e le plus @in est quant A lui compos de =;&8 lments
trian!ulaires pour un total de 8&## nbudsC +our cette tude7 les lments @inis
utiliss sont d@inis par des @onctions de @orme quadratiques A int!ration slectieC
Les parties "autes des mailla!es assi!nes d'une modlisation purement
mcanique sont constitues pour le mailla!e !rossier de 998 lments trian!ulaires
et le mailla!e @in de #$:F lments trian!ulairesC
Les conditions de bords "ydrauliques de type @lux nul n'in@luencent que tr4s peu les
rsultats prsents ci/dessous en comparaison des conditions imposant un pro@il de
pression "ydrostatique sur les bordsC
Illustration &.*" : 3aillages utiliss pour l'tude d'e9ca5ation de pente
$8# :CF Jtude de stabilit d'un dblai
C-<-4 Rs#t&ts !%tens s&ns #& mt7!*e *e sec!n* 5r&*ient *e *i"
#&t&ti!n
La mt"ode employe pour raliser l'excaation du talus utilise une approc"e
N multi/mod4les OC L'excaation linaire dans le temps est e@@ectue en rempla0ant
le poids de la couc"e A retirer par des @orces nodales quialentesC Une @onction
dcroissante en @onction du temps est applique sur ces @orces nodalesC 2urant la
priode d'excaation7 la aleur des @orces nodales arient de la @orce initiale
applique A la aleur &C Les rsultats obtenus en terme de contraintes erticales
c
--
et des ariables d'crouissa!e r
3
m
sont prsents sur l'illustration :C9& sur le
mailla!e !rossierC Apr4s la p"ase d'excaation7 on constate un crouissa!e non
n!li!eable du sol dans la 3one proc"e de l'excaation R r
3
m
-0,4 SC On constate
!alement une concentration de l'crouissa!e au pied du talus7 due A la prsence
de la sin!ularit !omtriqueC La aleur du traail de second ordre local est
!alement prsente sur l'illustration :C9$ et permet de constater une 3one
d'instabilit R
2
W0
S de la pente en partie suprieureC Le traail du second
ordre est calcul en considrant uniquement les contraintes e@@ecties du milieuC Les
dplacements !nrs ne sont pas prsents7 mais apparaissent n!li!eables A
l'c"elle de la structureC Les rsultats sont quasi/identiques durant cette p"ase
d'excaation entre les deux mailla!es utilissC
Illustration &.11 : Iso5aleurs du tra5ail de second ordre
2
W
(gauc-e) et de la dformation
5olumi)ue plasti)ue c
v
p
(droite) apr$s la p-ase d'e9ca5ation
Illustration &.1!: Iso5aleurs de c
--
(gauc-e) et de r
3
m
(droite) apr$s les p-ases
d'e9ca5ation
: Application de la t"orie du second !radient de dilatation $8=
Apr4s cette p"ase d'excaation7 un
c"ar!ement en tBte de talus par
dplacement est impos sur une lar!eur
de $ m A &79 m du bord de la pente
Rillustration :C9#SC L'amplitude maximale
du dplacement ertical impos !ale A
#& cm est atteinte apr4s #H "eures de
temps de simulationC Le c"ar!ement est
discrtis sur $&&& interalles !auxC
Ce c"ar!ement conduit A produire une
bande de cisaillement de @orme circulaire
dbouc"ante au milieu de la pente
Rillustrations :C9= et :C9HS7 nomm cercle
de talusC Les pro@ils de rupture du sol
sous la @ondation sont proc"es entre les
deux mailla!es qualitatiement7 mais quantitatiement les aleurs de d@ormations
au!mentent aec la @inesse du mailla!eC La bande de cisaillement se caractrise
par une concentration des aleurs du second inariant des d@ormations et une
mobilisation compl4te de l'an!le de @rottement r
3
m
-1 Rillustration :C99SC Un massi@
de sol se dtac"e de la pente le lon! de la bande de cisaillement Rillustration :C9FSC
Les di@@rences de rsultats entre les deux mailla!es sont importantes pour les
dplacements "ori3ontaux reles apr4s en@oncement de la @ondation Rmailla!e
!rossier U
,
m,g
-0,1(m [ mailla!e @in U
,
m,:
-0,2!m SC Le p"nom4ne de
localisation induit comme prcis au YFC9 une dpendance pat"olo!ique des
rsultats aux mailla!es7 caractrise notamment par la concentration des
d@ormations diatoires dans une bande de !lissement dpendante de la taille du
mailla!e utilis Rillustration :C9:SC On remarque !alement que les pro@ils de rupture
sont di@@rents selon les mailla!es utiliss7 puisque la simulation ralise aec le
mailla!e le plus @in conduit A l'apparition en partie suprieure d'une second bande
de localisation "ori3ontaleC
Illustration &.12 : <omtrie et conditions
au9 limites du talus pendant le c-argement
de la fondation
Illustration &.1' : Iso5aleurs du second in5ariant du tenseur des dformations sur le mod$le
mcani)ue apr$s enfoncement de la fondation superficielle : a)(gauc-e) maillage grossier ; b)
(droite) maillage fin
Illustration &.1* : Iso5aleurs de la dformation 5olumi)ue plasti)ue cumule sur le mod$le
mcani)ue apr$s enfoncement de la fondation superficielle : a)(gauc-e) maillage grossier ; b)
(droite) maillage fin
$8H :CF Jtude de stabilit d'un dblai
L'illustration :C9:a reprsente une coupe du second inariant du tenseur des d@or/
mations prsente par une li!ne aec @l4c"e blanc"e sur l'illustration :C9=C La aleur
maximale de la @orce de raction et le dplacement pour laquelle elle est relee a/
rient !alement en @onction du mailla!e utilis Rillustration :C9:bSC On peut !ale/
ment remarquer que le pro@il de la @orce axiale en tBte de talus apparaQt c"a"ut au
pic de contraintesC La coner!ence du calcul a t plus di@@icile A atteindre pour ces
nieaux de c"ar!ementsC
La dpendance pat"olo!ique au mailla!e peut !alement Btre caractrise par l'tat
d'actiation des mcanismes plastiques du mod4le de (u%euxC L'illustration :C98
prsente l'indicateur de plasticit relati@ au mcanisme "
4
m
RisotropeS en @onction
de la "auteurC Le massi@ de sol apparaQt en dc"ar!e sur toute sa "auteur A
l'exception des bandes de cisaillementC La lar!eur de la bande est directement lie
A la discrtisation spatiale utilise au cours de la simulation numriqueC
Illustration &.1B : Dforme (92) du dplacement latral U
,
du massif de sol apr$s
enfoncement U
1
=20cm de la fondation superficielle : a) (gauc-e) maillage grossier ; b)
(droite) maillage fin
Illustration &.1& : a) (gauc-e)+oupe trans5ersale du second in5ariant du tenseur des dformations
en fonction de la -auteur de talus ; b) (droite)(5olution de la raction nodale obtenue E la
fondation en fonction du dplacement impos
Illustration &.11 : Iso5aleurs de r
3
m
sur le mod$le mcani)ue apr$s enfoncement de la
fondation superficielle : a)(gauc-e) maillage grossier ; b)(droite) maillage fin
: Application de la t"orie du second !radient de dilatation $89
+ar ailleurs7 la ralisation de cette tude
de stabilit de dblai aec un mod4le de
(u%eux n'int!rant pas la dimension de
comportement adoucissant R b=0 S a
t ralise et est prsente en annexe
;C$H C Cette tude a pour but de
dmontrer la capacit du mod4le de
(u%eux int!r sous sc"ma implicite
dans CodeTAster de @ournir des rsultats
quialents aux approc"es classiques
utilises dans l'in!nierie Rmt"ode des
tranc"es selon )is"opS pour dterminer
la c"ar!e limite que peut supporter le
talus aant d'atteindre l'tat critique du
matriau sous la @ondationC
La section suiante prsente les rsultats obtenus en ralisant cette tude de
stabilit aec le mod4le de second !radient de dilatation pour les param4tres
matriaux de (u%eux donns aux tableaux :C$ et ;C:C
C-<-9 Rs#t&ts !%tens &;ec #& mt7!*e *e sec!n* 5r&*ient *e *i"
#&t&ti!n
Le probl4me aux limites considr est identique A celui prsent dans la section
Y:CFC# C La prise en compte d'une cinmatique enric"ie est limite au mod4le de
mcanique pure7 c'est A dire la partie suprieure du talus oZ apparaQt la li!ne de
rupture dans la structure sous le c"ar!ement appliqu ia la @ondation super@icielleC
Les conditions naturelles portant sur le tenseur de double @orces imposent
1
j
, n
j
=0
aux @ronti4res du mod4le mcaniqueC
Les deloppements et tudes raliss sur des essais biaxiaux drains ont
clairement montr qu'il est ncessaire de prendre en compte l'tat de contraintes
initial du sol RY:C9C9 SC
+our tenir compte de cette dpendance du module de ri!idit
b
s
A l'tat de
Illustration &.10 : Indicateur de plasticit du
mcanisme "
4
m
en fonction de la -auteur
Illustration &.1" : Lrofil des contraintes 5erticales apr$s e9ca5ation pour diffrentes coupes
dans le massif de sol
$8F :CF Jtude de stabilit d'un dblai
contraintes du sol Rariation entre
c
--
-30k#+
et la pression libre7 illustration
:C9;S7 la partie suprieure du talus est modlise par couc"es successies de
0,!m de "auteur7 aleur identique A celle utilise lors de la p"ase d'excaationC
Les aleurs de
b
s
retenues sont
prsentes sur l'illustration :CF&C Ces
aleurs sont tablies en se @ixant A partir
de la discrtisation spatiale des
mailla!es une lar!eur d'in@luence de
0,3m 7 aleur retenue suite aux
calculs raliss sans mt"ode de
r!ularisationC La procdure pour
dterminer les aleurs de
b
s
est
identique A celle prsente lors de
l'tude sur un essai biaxial drainC
L'approximation consistant A assimiler le
c"emin de c"ar!ement suii sous la
@ondation super@icielle A un essai biaxial
drain n'apparaQt pas comme l!itime
pour la partie proc"e de la 3one
excae7 puisque les conditions de
c"ar!ement latral sont modi@ies et les tats de contraintes plus @aiblesC -n
reanc"e7 du cMt oppos7 cette approximation nous paraQt plus l!itimeC
*anmoins7 la localisation de la bande de cisaillement est relatiement loi!ne de
la 3one oZ le sol s'est dc"ar!C Les rsultats de l'tude nous permettront d'tablir
si la procdure mise en place est adapte au probl4me pos ou bien mal adapteC
A la di@@rence des tudes menes sur les essais biaxiaux drains7 l'tat initial du sol
n'est plus isotrope puisque le coe@@icient de pousse des terres a t c"oisi !al A
K
0
=0,!
C ,l @aut donc en tenir compte dans la procdure mise en place pour
d@inir les aleurs ncessaires du module de ri!idit
b
s
C
Aant de prsenter les rsultats issus des calculs r!ulariss7 on peut d'ores et d%A
prciser les temps de calcul ncessaires pour raliser ces tudes aec ou sans
mt"ode de r!ularisationC Mal!r l'a%out de de!rs de libert supplmentaires R
-10 % S7 les tudes enric"ies aec le mod4le de second !radient de dilatation
permettent un !ain en temps C+U de 23% minimumC Le dtail des temps de
calcul est prsent dans le tableau :C9C Le matriel in@ormatique est constant pour
des tudes ralises sur un mailla!e identiqueC
Tem0s CPU @sB L!c&# R5#&ris Di22rence
M&i##&5e 5r!ssier $H$F;9 $&889= #=C#W
M&i##&5e 2in #FF9;$ #&#F;H #HC&W
T&%#e& C-:$ Tem0s CPU ncess&ires 0!r r&#iser #es t*es *e st&%i#it *e
0ente &;ec ! s&ns r5#&ris&ti!n
La seconde di@@rence ma%eure concerne le nombre d'itrations !lobales ralisesC
+our les simulations sans mt"odes de r!ularisation7 le nombre d'itrations
Illustration &.B! : (5olution du module b
s
rduit en fonction de l'tat de contraintes
initiales pour une 5aleur 5ise de
l
c
=0,!m
: Application de la t"orie du second !radient de dilatation $8:
!lobales de *eUton est pass de #;;;$ itrations A HH9&:7 soit une au!mentation
de 32% 7 tandis que pour les simulations r!ularises7 on constate une
au!mentation mineure de 4 % Rpassa!e de $:F;# itrations A $89&$ itrationsSC
Les rsultats obtenus dans le cadre de cette tude sont prsents sur les
illustrations :CF$7 :CF#7 :CF=7 :CFH et :CF9 pour les deux mailla!esC On constate tout
d'abord un pro@il de rupture similaire aec des dplacements "ori3ontaux en tBte de
talus tr4s proc"es7 U
2
max
-0,20 m Raleurs d'c"elle communes entre les deux
mailla!es sur les illustrations :CF$7 :CF# et :CF=SC On remarque tout de mBme sur le
mailla!e !rossier7 un mouement d'ensemble plus lar!e et la disparition de la
deuxi4me bande de cisaillement sur le mailla!e le plus @in7 en comparaison des
rsultats du calcul sans r!ularisationC
La lar!eur des bandes de cisaillement n'est plus rduite A celle d'un lment @ini7
mais se rpartie sur plusieurs lmentsC On note !alement un lar!issement de la
bande au point de sortie du cercle de talus aec une position dcale de la li!ne de
cisaillement entre les deux mailla!es Rillustrations :CF#7 :CF= et :CF9aSC L'olution
de la lar!eur des bandes de cisaillement peut s'expliquer par la non prise en compte
initiale de l'tat de contraintes du sol dans cette 3one suite A la premi4re p"ase
d'excaationC
Les di@@rences de pro@il de rponse entre les deux simulations r!ularises peuent
se %usti@ier par le nombre important de cercles de rupture possibles selon la
mt"ode de )is"op pour une @aible ariation sur la c"ar!e applique A la @ondation
Rconclusion tablie suite A l'utilisation du lo!iciel TalrenSC
Illustration &.B1: Dforme -oriIontale U
,
(92) apr$s mise en place de la fondation
superficielle sur une profondeur de 2! cm ; gauc-e) maillage grossier ; droite) maillage fin.
Illustration &.B2: Iso5aleurs du second in5ariant du tenseur des dformations sur le mod$le
mcani)ue apr$s enfoncement de la fondation superficielle : gauc-e) maillage grossier ; droite)
maillage fin
$88 :CF Jtude de stabilit d'un dblai
L'olution de la @orce de raction en tBte de @ondation apparaQt di@@rente entre les
deux simulations7 aec une aleur plus @orte au pic pour le mailla!e !rossier7
p"nom4ne identique au cas sans r!ularisation Rillustration :CF9bSC -n superpos7
on retroue les rsultats tablis sans la mt"ode de second !radient de dilatationC
Les aspects c"a"uts constats sur le mailla!e le plus @in ont disparu aec la prise
en compte des milieux enric"is du type second !radient de dilatationC
+our cet exemple7 la prise en compte des milieux du second !radient de dilatation
ne conduit pas A des aleurs conseraties pour la @orce de raction de la @ondation
super@icielleC Les rsultats issus de la simulation r!ularise aec le mailla!e
!rossier ne prsentent pas le mode de rupture dissipant le moins d'ner!ie et
sollicitent une 3one de sol trop lar!eC
Illustration &.B': Iso5aleurs de la dformation 5olumi)ue plasti)ue cumule c
v
p
apr$s mise en
place de la fondation superficielle sur une profondeur de 2! cm ; gauc-e) maillage grossier ;
droite) maillage fin.
Illustration &.B1 : a.gauc-e) +oupe 5erticale du second in5ariant du tenseur des
dformations apr$s mise en place de la fondation superficielle sur une profondeur de 2! cm ;
b.droite) (5olution de la force de raction en tAte de la fondation superficielle en fonction du
dplacement impos.
Illustration &.B*: Iso5aleurs du tra5ail de second ordre
2
W
apr$s mise en place de la
fondation superficielle sur une profondeur de 2!cm ; gauc-e) maillage grossier ; droite) maillage
fin.
: Application de la t"orie du second !radient de dilatation $8;
La aleur du param4tre
b
s
n'est pas
adapte A la discrtisation spatiale du
mailla!e !rossier et A l'olution locale
des tats de contraintes7 ce qui d@init un
pro@il de rupture di@@rent sollicitant la
partie du sol suprieure A la bande de
cisaillement attendue Rillustration :CFFSC
On remarque A noueau que les tats
plastiques issus de la simulation
r!ularise aec le mailla!e @in ne sont
plus concentrs dans une lar!eur d'un
seul lmentC
C-<-: Pi#&n et 0ers0ecti;es *e #8t*e *e st&%i#it *e 0ente
L'analyse de la stabilit d'une pente sous le c"ar!ement d'une @ondation
super@icielle a permis de mettre en place la mt"odolo!ie de simulation d'excaation
du sol aec CodeTAster7 de mettre en aant le probl4me de dpendance
pat"olo!ique des rsultats au mailla!e et de proposer un outil de modlisation
adapt pour rsoudre ce probl4me de sensibilit aec la mt"ode des lments
@inisC
Les premi4res conclusions de cette tude sont A rapproc"er de la capacit
dmontre du CodeTAster A modliser et coner!er pour des tudes d'instabilits
d'oura!es en terre mettant en aant le p"nom4ne de localisation des
d@ormations aec le mod4le de (u%euxC La bonne concordance des rsultats issus
de CodeTAster en comparaison des rsultats obtenus aec la mt"ode des
tranc"es de )is"op sous Talren con@irment !alement les aptitudes du mod4le de
(u%eux A reprsenter de @a0on @lexible le comportement du sol sou"aitC
Les simulations ralises dans le cadre de la mcanique classique des milieux
continus ont montr une concentration des d@ormations dans des bandes de
cisaillement7 @onction de la discrtisation spatiale utiliseC
-n prenant en compte la cinmatique enric"ie des milieux du second !radient de
dilatation7 la dpendance pat"olo!ique des rsultats aux mailla!es a t corri!e
Rillustration :CF=S et le temps de calcul rduit mal!r le nombre suprieur de de!rs
de libertC La c"ar!e limite obtenue dans le cas des simulations r!ularises est
quialente A celle des simulations N locales OC La 3one de r!ularisation se limite A
la partie suprieure du talus7 3one oZ se concentrent les d@ormations ma%eures
dans le cadre de cette tudeC
-n reanc"e7 des corrections doient Btre apportes A la procdure mise en place
pour la ralisation de cette tudeC Les simulations menes adoptent un module de
ri!idit de r!ularisation constant par couc"esC Cette "ypot"4se conduit dans la
3one proc"e de l'excaation A une 3one d'interaction plus lar!e que celle attendueC
Cette procdure ne tient pas compte de la diminution des tats de contraintes dans
la 3one dstabilise par l'excaationC Les simulations ralises sur des essais
biaxiaux ont en e@@et montr une dpendance de la aleur du module de ri!idit
b
s
A l'tat de contraintes de con@inement RY:C9 SC
Illustration &.BB : Indicateur de plasticit du
mcanisme "
4
m
en fonction de la -auteur
de sol ; 3ail <FD = 3aillage <rossierFDin
$;& :CF Jtude de stabilit d'un dblai
Cette N @aiblesse O de la modlisation conduit A modi@ier le pro@il de rupture dans la
3one proc"e de la pente et sollicite en cisaillement une lar!eur de sol trop
importanteC ,l apparaQt ncessaire d'adapter la procdure en lui permettant d'a@@ecter
une aleur du module de ri!idit
b
s
en @onction de l'tat de contraintes du
matriauC Cet aspect permettrait de bn@icier des proprits r!ularisantes des
milieux du second !radient de dilatation en coupla!e aec le mod4le de (u%eux ou
tout ceux bass sur les mod4les de type Cam/ClayC
8 Conclusions !nrales et perspecties $;$
E C!nc#si!ns 5nr&#es et 0ers0ecti;es
La modlisation @ine du comportement des sols est un domaine complexe
conduisant A la @ormulation de mod4les non standard !nralissC Les besoins
actuels de l'in!nierie s'intressant au comportement sismique de structures
!otec"niques7 tant au stade de la conception qu'A celui de la raluation
d'oura!es existants7 ncessitent l'utilisation de tels mod4lesC
Le traail de t"4se consistait dans un premier temps A raliser l'int!ration du
mod4le lastoplastique multimcanismes de l'-C+ dit de (u%eux7 un des rares
mod4les reconnus pour sa capacit A reprsenter le comportement des sols sous
c"ar!ements cycliques et sur une lar!e !amme de d@ormations7 selon un sc"ma
implicite qui !arantit A coner!ence de respecter en tout point la @ormulation
t"orique du mod4leC La prcision et la robustesse du sc"ma implicite d'int!ration
Rdans CodeTAsterS ont t dmontres sur des c"emins aris de c"ar!ement
"omo!4ne7 notamment par comparaison aux rsultats obtenus en int!ration
expliciteC La modlisation de la construction par couc"es d'une colonne de sol suiie
de l'application d'un c"ar!ement sismique a t ralise et les solutions obtenues
sont en tr4s bon accord aec les solutions @ournies par une int!ration locale
explicite RG-F2ynS7 utilisant le mBme mod4le de comportement int!r selon un
sc"ma explicite A sous/incrmentationC +ar la suite7 le mod4le a t utilis pour
delopper des mt"odolo!ies de simulations de construction par couc"es7 mise en
eau et comportement sous c"ar!ement sismique d'une di!ue en terreC
*anmoins7 les tudes ralises en parall4le selon les deux sc"mas d'int!ration
du mod4le ont montr que l'int!ration implicite n'est pas aussi per@ormante que le
sc"ma explicite si on se restreint A l'analyse du temps C+U consomm7 dans les
p"ases oZ les instabilits adiennentC 2es amliorations du sc"ma implicite sont
nanmoins possibles A @aible coXt de deloppementC L'insertion d'un al!orit"me de
rec"erc"e linaire dans la rsolution du syst4me d'quations locales nous apparaQt
comme un c"oix l!itime et potentiellement tr4s intressant en terme de !ain sur le
temps C+UC
La modlisation numrique7 par la mt"ode des lments @inis7 des probl4mes aux
limites prenant en compte des mod4les de comportement lastoplastique non
standard adoucissant conduit A une dpendance pat"olo!ique des solutions A la
discrtisation spatiale utilise pour des modes de rupture du type localisC Les
d@ormations plastiques se concentrent alors dans une lar!eur d'lment7 selon le
type de mailla!eC
2ans le cadre de cette t"4se7 nous %usti@ions l'utilisation du cadre des milieux
continus enric"is du second !radient de dilatation pour raliser des simulations dont
les solutions sont ob%ecties par rapport aux mailla!es utiliss7 aec le mod4le de
(u%euxC -n complment des lments t"oriques delopps dans la t"4se de
Fernandes R#&&;aS sur la d@inition des milieux du second !radient de dilatation7
nous aons tendu cette approc"e aux quations de la dynamiqueC L'impact de la
prise en compte des milieux du second !radient de dilatation sur la propa!ation des
ondes dans un milieu lastique ou poro/lastique ne modi@ie pas @ondamentalement
le c"amp d'ondes dans le milieu7 dans le domaine de @rquences ises lors d'un
sismeC L'impact de cette @ormulation enric"ie apparaQt n!li!eable sur les termes
d'ner!ie et ne modi@ie pas la aleur du param4tre de contrMle conduisant A
l'instabilit du domaine tudiC
$;# 8 Conclusions !nrales et perspecties
La prise en compte dans les simulations numriques des milieux du second !radient
de dilatation permet d'amliorer nettement la coner!ence numrique !lobale des
calculs non linaires7 supprime la dpendance pat"olo!ique des solutions aux
mailla!es et ne modi@ie pas le point d'apparition du mode d'instabilitsC 2e plus7
mal!r l'a%out d'une inconnue nodale supplmentaire7 l'impact sur le temps C+U
ncessaire A la ralisation des tudes est tr4s @aible7 oire positi@ en comparaison
des per@ormances relees aec la mt"ode classique des milieux continus7 comme
cela a t obser sur l'tude de la @ondation sur talus apr4s excaationC
Un point ma%eur aant une utilisation N presse/bouton O de cette approc"e est reli
A la maQtrise du param4tre de r!ularisationC 2ans le cadre des simulations
numriques ralises sur des essais biaxiaux drains aec le mod4le de (u%eux7
nous aons montr que l'exemple analytique d'une bande dilatante cisaille permet
de prdire et corroborer la lar!eur des bandes de localisation obtenues
numriquementC
L'extension de cette approc"e A tout type de c"ar!ement doit encore Btre
appro@ondie pour proposer une mt"odolo!ie robuste et e@@icace dterminant la
aleur du param4tre de r!ularisation @onction des tats de contraintes du matriau
et de ses param4tresC Une premi4re oie d'approc"e consisterait A raliser un
premier calcul sur mailla!e !rossier pour exploiter les c"emins de c"ar!ement
conduisant A des instabilits des structures et permettre de d@inir en post/
traitement A ce premier calcul les aleurs ncessaires pour le param4tre de
r!ularisationC
Cette mt"ode de r!ularisation restreint le domaine de solutions possibles durant
la p"ase d'adoucissement du matriau mais n'en assure pas l'unicitC ,l apparaQt
ncessaire A terme de traailler dans le continuum de solutions possibles et de
russir A d@inir la plus pnalisante pour la structureC
La mise en bure de la r!ularisation aec second !radient de dilatation dans le
cadre du mod4le de (u%eux a montr l'intrBt de son usa!e7 tout comme cela a t
@ait aec d'autres mod4les de comportement produisant la mBme pat"olo!ieC
; Annexes $;=
D Anne.es
; AnnexesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;=
;C$ 'elations entre les param4tres lastiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC$;9
;C# Calcul analytique de la matrice tan!ente d'int!ration locale CCCCCCCCCCCCCCCCCCCCCC$;:
;C= -ssai cyclique induisant une rotation de l'tat de contraintesCCCCCCCCCCCCCCCCCCCCCC#&;
;CH -ssai biaxial drain sur sable d'(ostunCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#$=
;C9 -ssai triaxial non drain cycliqueCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC##=
;CF -ssai de cisaillement aec micro/dc"ar!esCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#=9
;C: Modlisation d'une di!ue en terre aec le mod4le de (u%euxCCCCCCCCCCCCCCCCCCCCCC#=;
;C8 Analyse des syst4mes dynamiquesCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC#H:
;C; +erturbation de la suite des itrs de la mt"ode de *eUtonCCCCCCCCCCCCCCCCCCCCCC#99
;C$& Application du mod4le de second !radient olumique A la dynamiqueCCCCCC#9:
;C$$ Tenseur lastoplastique du mod4le (u%eux type Cam/Clay R(CCSCCCCCCCCCCCC#F:
;C$# 2omaine des directions instables selon le crit4re de 'iceCCCCCCCCCCCCCCCCCCCCCCCCC#F;
;C$= Simulation d'un essai biaxial drain sur sable d'(ostun A 2'VH&WCCCCCCCCCC#:$
;C$H Analyse de stabilit de pente aec la mt"ode des tranc"es de )is"opCCCC#::
$;H ; Annexes
; Annexes $;9
D-, Re#&ti!ns entre #es 0&r&m+tres #&sti3es
Les relations entre les di@@rents param4tres utiliss pour reprsenter l'lasticit
linaire sont prsentes dans le tableau ;C$ :
C!0#e
*e 0&"
r&"
m+tres
M!*#e *e
cis&i##ement
G=j
M!*#e
*8Q!n5
E
M!*#e *e
C!m0res"
si!n
K
C!e22icient
*e P!iss!n
+
P&r&m+tre *e
L&m
\
G , E G E
EG
'G3 E
E2G
2G
G( E2G)
3GE
G , K G
'G K
3 K+G
K
3 K2G
2( 3 K+G)
K
2G
3
G ,\ G
G(3\+2G)
\+G
\+
2G
3
\
2(\+G)
\
G ,+ G 2G(1++)
2G(1++)
3(12+)
+
2G+
12+
E , K
3 K E
' KE
E K
3 KE
6 K
K( ' K3 E)
' KE
E , +
E
2(1++)
E
E
3(12+)
+
+ E
(1++)(12+)
K , \
3( K\)
2
' K( K\)
3;\
K
\
3;\
\
K , +
3 K(12+)
2(1++)
3 K(12+) K +
3 K +
1++
T&%#e& D-, $ Re#&ti!ns entre #es c!nst&ntes #&sti3es
$;F ;C$ 'elations entre les param4tres lastiques
; Annexes $;:
D-/ C&#c# &n&#(ti3e *e #& m&trice t&n5ente *8int5r&ti!n #!"
c&#e
On doit rsoudre par une mt"ode de *eUton le syst4me d'quations non linaires
locales suiant : %( A%) =0 7 crit A la @in de l'incrment tudi7 oZ
A%=
(
Ac
ij
, Ac
v
p
,Ar
k
K
, A( A\
k
K
) )
C Ceci s'crit aec
H
ijkl
le tenseur lastique
d'ordre H du mod4le :
c
ij
"
c
ij
#
H
ijrs
( c
"
)
(
Ac
rs
k1,4
(
A\
k
K
( 1
k
K
)
rs
)
)
= 0 ( LE
ij
)
( c
v
p
)
"
(c
v
p
)
#
k 1,4
(
A\
k
K
(1
k
K
)
rs
/
rs
)
= 0 ( LEVP)
(
r
k
K
)
"
(
r
k
K
)
#
A\
k
K
j
k
K
= 0
(
LR
k
K
)
f
k
K
= 0
(
LF
k
K
)
R;C$S
,l @aut donc tablir le calcul de la matrice tan!ente
(
%
A%
)
A%
7 ce qui ncessite le
calcul analytique des di@@rentes dries suiantes par rapport A
%=(c
ij
, c
v
p
, r
k
K
, A\
k
K
)
:
(
%
( A%)
)
A%
=
|
LE
ij
c
rs
LE
ij
c
v
p
LE
ij
r
k
K
LE
ij
(
A\
k
K
)
LEVP
c
rs
LEVP
c
v
p
LEVP
r
k
K
LEVP
(
A\
k
K
)
LR
k
K
c
rs
LR
k
K
c
v
p
LR
k
K
r
k
K
LR
k
K
(
A\
k
K
)
LF
k
K
c
rs
LF
k
K
c
v
p
LF
k
K
r
k
K
0
R;C#S
Ces dries sont tablies dans les para!rap"es Y;C#C$ 7 Y;C#C# 7 Y;C#C= 7 Y;C#CH et
Y;C#C9
D-/-, Dri;es *e #83&ti!n *8t&t
-lles proiennent de l'quation d'tat HC$9 :
c
ij
"
c
ij
#
H
ijrs
( c
"
)
(
Ac
rs
k 1,4
(
A\
k
K
( 1
k
K
)
rs
)
)
=0 ( LE
ij
)
$;8 ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
C&#c# *es c!m0!s&ntes
LE
ij
c
rs
@tenser *8!r*re 9B $
LE
ij
( c
"
)
rs
=
( c
"
)
ij
( c
"
)
rs
H
ijmn
"
( c
"
)
rs
(
Ac
mn
k 1,4
A\
k
K
(1
k
K
)
mn
"
)
+H
ijmn
"
k 1,3
A\
k
K
(
1
k
K
)
mn
"
( c
"
)
rs
R;C=S
La contribution des mcanismes isotropes est nulle dans le dernier terme de
l'expression ;C=C Les expressions des di@@rents termes mis en %eu dans le calcul de
cette drie sont :
H
ijmn
"
c
rs
"
=
H
ijmn
"
p( c
"
)
p(c
"
)
c
rs
"
=
n
e
#
ref
(
p( c
"
)
#
ref
)
n
e
1
H
ijmn
ref 1
3
/
rs
=
n
e
3 p( c
"
)
H
ijmn
"
/
rs
R;CHS
(1
k
m
)
mn
c
rs
"
=
1
2q
k
( 1
k
)
mn
c
rs
"
( 1
k
)
mn
2 q
k
2
q
k
c
rs
"
o
( r
k
m
)
2
(
/
k
)
mn
(
1
p
k
q
k
c
rs
"
q
k
p
k
2
p
k
c
rs
"
)
d2/<
(
1
k
m
)
mn
c
rs
"
=
1
2 q
k
(
Dev
k
)
mnrs
(
1
k
)
mn
4q
k
3
(
1
k
)
rs
o
(
r
k
m
)
4 p
k
(
/
k
)
mn
(
(
1
k
)
rs
q
k
q
k
p
k
(
/
k
)
rs
)
R;C9S
; Annexes $;;
(1
k
c
)
mn
c
rs
"
=
1
2q
k
c
( 1
k
c
)
mn
c
rs
"
( 1
k
c
)
mn
4( q
k
c
)
3
(
1
k
c
)
ij
( 1
k
c
)
ij
c
rs
"
o
( r
k
c
) ( /
k
)
mn
4 p
k
q
k
c
,,,
,,,
(
( 1
k
c
)
ij
c
rs
"
(
1
k
)
ij
+
( 1
k
)
ij
c
rs
"
(
1
k
c
)
ij
( 1
k
c
)
ij
( 1
k
)
ij
p
k
q
k
c
(
q
k
c
p
k
c
rs
"
+p
t
q
k
c
c
rs
"
)
)
d2/<:
(
1
k
c
)
mn
c
rs
"
=
1
2q
k
c (
(
Dev
k
)
mnrs
F
(
p
k
, c
v
p
)
b "
2
( 4
k
H
+t
k
H
r
k
c
)
mn
(
/
k
)
rs )
( 1
k
c
)
mn
4(4 q
k
c
)
3 (
(
1
k
c
)
rs
F ( p
k
, c
v
p
)b"
2
(
4
k
H
+t
k
H
r
k
c
)
ij
(
1
k
c
)
ij
(
/
k
)
rs )
+
o( r
k
c
) (
/
k
)
mn
4 p
k
q
k
c (
F ( p
k
, c
v
p
)b"
2
( 4
k
H
+t
k
H
r
k
c
)
ij
( 1
k
c
)
ij
(
/
k
)
rs
+
( 1
k
)
ij
( 1
k
c
)
ij
2q
k
c
(
( 1
k
c
)
rs
q
k
c
F ( p
k
, c
v
p
)b"
2
(
4
k
H
+t
k
H
r
k
c
)
ij
(
t
k
H
)
ij
(
/
k
)
rs
)
+
(
1
k
)
ij
(
1
k
c
)
ij
2 p
k
( (
/
k
)
rs
(
1
k
)
rs
( 1
k
c
)
rs
)
)
R;CFS
C&#c# *es c!m0!s&ntes
LE
ij
c
v
p
@tenser *8!r*re /B $
LE
ij
c
v
p
=3 K
ref
p( c)
#
ref
n
e
/
ij
R;C:S
C&#c# *es c!m0!s&ntes
LE
ij
r
k
K
@tenser *8!r*re /B $
-n premier lieu7 on di@@rencie les dries par rapport aux mcanismes diatoires
et isotropesC -nsuite7 des di@@rences existent !alement entre les mcanismes
monotones et cycliquesC
Mcanismes diatoires
LE
ij
r
k
K
=H
ijrs
t 1,3
A\
t
:
(1
t
:
)
rs
r
t
:
=A\
k
K
H
ijrs
(1
k
K
)
rs
r
k
K
R;C8S
Mcanismes diatoires monotones
#&& ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
LE
ij
r
k
m
=
0 r
k
m
<r
h-s
o
2
A\
k
m
(
sin+
q
k
p
k
)
r
k
m
H
ijrs
(
/
k
)
rs
si r
h-s
<r
k
m
<r
m)b
0 r
k
m
r
m)b
R;C;S
Mcanismes diatoires cycliques
LE
ij
r
k
c
=
A\
k
c
2
H
ijrs
(
p
k
F
k
q
k
c
(
(
1
k
c
)
ij
(
t
k
H
)
ij
2
(
q
k
c
)
2
( 1
k
c
)
rs
( t
k
H
)
rs
)
o
(
sin+
( 1
k
c
)
ij
( 1
k
)
ij
2 p
k
q
k
c
)
r
k
c
(
/
k
)
rs
o
( r
k
c
) F
k
2 q
k
c
(
( 1
k
c
)
ij
(t
k
H
)
ij
2( q
k
c
)
2
( 1
k
)
ij
( 1
k
c
)
ij
( 1
k
)
ij
(t
k
H
)
ij
)
( /
k
)
rs
)
R;C$&S
Mcanismes isotropes
Les dries sont nulles pour les mcanismes isotropes monotone et cycliqueC
C&#c# *es c!m0!s&ntes
LE
ij
A\
k
K
@tenser *8!r*re /B $
LE
ij
A\
k
K
=H
ijrs
"
( 1
k
K
)
rs
R;C$$S
D-/-/ Dri;es *e #83&ti!n *8;!#ti!n *e #& *2!rm&ti!n 0#&sti3e
;!#mi3e
-lles proiennent de l'olution de la d@ormation olumique plastique :
(c
v
p
)
"
(c
v
p
)
#
k 1,4
(
A\
k
K
( 1
k
K
)
rs
/
rs )
=0 LEVP
C&#c# *es c!m0!s&ntes
LEVP
c
ij
@tenser *8!r*re /B $
; Annexes #&$
LEVP
c
ij
"
=
k1,3
A\
k
m
2 p
k
o
(
r
k
m
)
(
(
1
k
)
ij
q
k
q
k
(
/
k
)
ij
p
k
)
+
k1,3
A\
k
m
2 p
k
q
k
c
o(r
k
c
)
(
(
1
k
)
ij
+( 1
k
c
)
ij
(
1
(
1
k
)
mn
(
1
k
c
)
mn
(
q
k
c
)
2
)
)
R;C$#S
Les mcanismes isotropes ne contribuent pas au calcul de cette drieC
C&#c# *es c!m0!s&ntes
LEVP
c
v
p @sc&#&ireB $
LEVP
c
v
p
=1
k 1,3
A\
k
c
2q
k
c
b " o( r
k
c
)
|
( 1
k
)
ij
(
4
k
H
+t
k
H
( r
k
c
))
ij
( 1
k
c
)
ij
(
1
k
)
ij
2q
k
c
( 4
k
H
+t
k
H
r
k
c
)
R;C$=S
C&#c# *es c!m0!s&ntes
LEVP
r
k
K @sc&#&ireB $
Seuls les mcanismes diatoires ont des composantes suiant cette drieC
Mcanismes diatoires monotones
LEVP
r
k
m
=
0 r
k
m
<r
h-s
oA\
k
m
,
m
r
m)b
r
h-s
(
r
k
m
r
h-s
r
m)b
r
h-s
)
,
m
1
(
sin+
q
k
p
k
)
si r
h-s
<r
k
m
<r
m)b
0 r
k
m
r
m)b
R;C$HS
Mcanismes diatoires cycliques
LEVP
r
k
c
=A\
k
c
o
(
r
k
c
(
sin+
( 1
k
c
)
ij
( 1
k
)
ij
2 p
k
q
k
c
)
F
k
( r
k
c
)
2q
k
c
(
( t
k
H
)
ij
(
1
k
)
ij
( 1
k
c
)
ij
(
1
k
)
ij
2 q
k
c
( t
k
H
)
mn
( 1
k
c
)
mn
)
)
R;C$9S
C&#c# *es c!m0!s&ntes
LEVP
A\
k
K @sc&#&ireB $
LEVP
A\
k
K
=
(
1
k
K
)
ij
(
/
k
)
ij
R;C$FS
#&# ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
Mcanismes diatoires monotones
LEVP
A\
k
m
=o( r
k
m
)
(
sin+
q
k
p
k
)
R;C$:S
Mcanismes diatoires cycliques
LEVP
A\
k
c
=o( r
k
c
)
(
sin+
( 1
k
c
)
ij
(
1
k
)
ij
2 p
k
q
k
c
)
R;C$8S
Mcanisme isotrope monotone
LEVP
A\
4
m
=sign( p)
R;C$;S
Mcanismes isotropes cycliques
LEVP
A\
4
c
=sign( p) sign( p
c
)
R;C#&S
D-/-4 Dri;es *e #83&ti!n *8;!#ti!n *es ;&ri&%#es *8cr!is"
s&5e
-lles proiennent de l'olution de l'crouissa!e des di@@rents mcanismes du
mod4le de (u%eux7 diatoires et isotropes :
( r
k
K
)
"
( r
k
K
)
#
A\
k
K
j
k
K
=0 ( LR
k
K
)
C&#c# *es c!m0!s&ntes
LR
k
K
c
ij
@tenser *8!r*re /B $
Seuls les mcanismes diatoires cycliques apportent une contribution au calcul de
cette drie :
LR
k
c
c
ij
"
=A\
k
c
(1r
k
c
)
2
+
c
+( r
k
c
) ( +
m
+
c
)
1
(
2 q
k
c
( 1
k
c
)
rs
(t
k
H
)
rs
)
( 1
k
c
)
rs
c
ij
"
(
2 q
k
c
(
t
k
H
)
rs
( 1
k
c
)
mn
(t
k
H
)
mn
q
k
c
(
1
k
c
)
rs
)
R;C#$S
C&#c# *es c!m0!s&ntes
LR
k
K
c
v
p
@sc&#&ireB $
Mcanismes diatoires cycliques
; Annexes #&=
LR
k
c
c
v
p
=
A\
k
c
( 1r
k
c
)
2
+
c
+(r
k
c
) ( +
m
+
c
)
1
(
2q
k
c
( 1
k
c
)
rs
( t
k
H
)
rs
)
( 1
k
c
)
rs
c
v
p
(
2 q
k
c
(
t
k
H
)
rs
( 1
k
c
)
mn
(t
k
H
)
mn
q
k
c
(
1
k
c
)
rs
)
R;C##S
aec
( 1
k
c
)
ij
c
v
p
= " b p
k
(
4
k
H
+t
k
H
r
k
c
)
rs
Mcanismes isotropes
LR
4
K
c
v
p
=
A\
4
K
#
ref
( 1r
4
K
)
2
c
K
#
c
( c
v
p
)
R;C#=S
C&#c# *es c!m0!s&ntes
LR
k
K
r
k
K
@sc&#&ireB $
Mcanismes diatoires
Mcanismes diatoires monotones
=>
k
m
r
k
m
=
1+A\
k
m
2(1r
k
m
)
+
c
r
k
m
r
h-s
1+
A\
k
m
( 1r
k
m
)
+
c
+( r
k
m
) ( +
m
+
c
)
(
2+
( 1r
k
m
) ( +
m
+
c
)
+
c
+( r
k
m
)( +
m
+
c
)
r
k
m
)
r
h-s
r
k
m
r
m)b
1+A\
k
m
2(1r
k
m
)
+
m
r
k
m
>r
m)b
R;C#HS
Mcanismes diatoires cycliques
=>
k
c
r
k
c
=1+
A\
k
c
(1r
k
c
)
+
c
+(r
k
c
) (
+
m
+
c
)
2 q
k
c
2q
k
c
( 1
k
c
)
ij
( t
k
H
)
ij
(
2+
( 1r
k
c
) (
+
m
+
c
)
+
c
+( r
k
c
) (
+
m
+
c
)
r
k
c
)
A\
k
c
( 1r
k
c
)
2
+
c
+(r
k
c
) (
+
m
+
c
)
1
2q
k
c
( 1
k
c
)
ij
( t
k
H
)
ij
( 1
k
c
)
ij
r
k
c
(
2q
k
c
(t
k
H
)
ij
( 1
k
c
)
rs
( t
k
H
)
rs
q
k
c
( 1
k
c
)
ij
)
R;C#9S
aec :
#&H ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
(
1
k
c
)
ij
r
k
c
=p
k
( c) F
(
c ,c
v
p
) (
t
k
H
)
ij
Mcanismes isotropes
=>
4
K
r
4
K
=1+2A\
4
K
(1r
4
K
)
c
K
(
#
ref
#
c
(c
v
p
)
)
R;C#FS
C&#c# *es c!m0!s&ntes
LR
k
K
\
k
K
@sc&#&ireB $
Mcanismes diatoires
=>
k
K
\
k
K
=
(1r
k
K
)
2
+
c
+(r
k
K
) ( +
m
+
c
)
k
K
R;C#:S
aec
k
m
= 1
k
c
=
2q
k
c
2q
k
c
(
1
k
c
)
ij
(
t
k
H
)
ij
Mcanismes isotropes
=>
4
K
\
4
K
=
( 1r
4
K
)
2
c
K
(
#
ref
#
c
(c
v
p
)
)
R;C#8S
D-/-9 Dri;es *es crit+res *es mc&nismes 0#&sti3es
-lles proiennent des crit4res exprims au c"apitre Y= :
f
k
K
=0
(
LF
k
K
)
C&#c# *es c!m0!s&ntes
LF
k
K
c
ij
@tenser *8!r*re /B $
Mcanismes diatoires
Mcanismes diatoires monotones
; Annexes #&9
LF
k
m
c
ij
"
=
(
1
k
)
ij
2q
k
+
"
2
( r
k
m
)
(
1b
(
1+ln
(
p
k
#
c
(c
v
p
)
))
)
( /
k
)
ij
R;C#;S
Mcanismes diatoires cycliques
LF
k
c
c
ij
"
=
( 1
k
c
)
ij
2q
k
c
+
"
2
(
1b
(
1+ln
(
p
k
#
c
( c
v
p
)
))
)
(
r
k
c
( ( 4
k
H
)
rs
+( t
k
H
)
rs
r
k
c
)
(
1
k
c
)
rs
2q
k
c
)
(
/
k
)
ij
R;C=&S
Mcanismes isotropes
Mcanisme isotrope monotone
LF
4
m
c
ij
"
=
1
3
p
p
/
ij
R;C=$S
Mcanismes isotropes cycliques
LF
4
m
c
ij
"
=
1
'
p
p
p
c
p
c
/
ij
R;C=#S
C&#c# *es c!m0!s&ntes
LF
k
K
c
v
p
@sc&#&ireB $
Mcanismes diatoires
Mcanismes diatoires monotones
LF
k
m
c
v
p
= " b p
k
r
k
m
R;C==S
Mcanismes diatoires cycliques
LF
k
c
c
v
p
= " b p
k
(
r
k
c
( 1
k
c
)
ij
2 q
k
c
( ( 4
k
H
)
ij
+( t
k
H
)
ij
r
k
c
)
)
R;C=HS
Mcanismes isotropes
Mcanisme isotrope monotone
#&F ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
LF
4
m
c
v
p
= #
c
( c
v
p
) r
4
m
R;C=9S
Mcanismes isotropes cycliques
LF
4
c
c
v
p
= #
c
(c
v
p
)
(
p
c
p
c
4
4
H
+r
4
c
)
R;C=FS
C&#c# *es c!m0!s&ntes
LF
k
K
r
k
K
@sc&#&ireB $
Mcanismes diatoires
Mcanismes diatoires monotones
LF
k
m
r
k
m
=" p
k
(
1b ln
(
p
k
( c)
#
c
(
c
v
p
)
)
)
R;C=:S
Mcanismes diatoires cycliques
LF
k
c
r
k
c
=" p
k
(
1bln
(
p
k
( c)
#
c
(
c
v
p
)
))
(
1
(
1
k
c
)
ij
(
t
k
H
)
ij
2q
k
c
)
R;C=8S
Mcanismes isotropes
LF
4
K
r
4
K
= #
c
( c
v
p
) R;C=;S
C&#c# *es c!m0!s&ntes
LF
k
K
\
k
K
@sc&#&ireB $
Les dries sont nulles pour tous les mcanismes du mod4leC
D-/-: N!t&ti!n *es tensers? in;&ri&nts et *i;erses *ri;es
+our plus de @acilits7 on se place dans la base ort"onorme (
e
1
, e
2
, e
3
) de
l'espace A = dimensionsC On d@init le tenseur identit d'ordre #7 en utilisant la
notation de Lalpole/CoUin :
; Annexes #&:
/
ij
=6
ij
e
i
e
j
=
(
1
1
1
0
0
0
)
R;CH&S
+our c"aque mcanisme dans le plan k 7 on d@init la pression isotrope p
k
( c) 7
la contrainte diatoire q
k
( c) et le tenseur des contraintes diatoires (
1
k
)
ij
:
p
k
( c) =
1
2
tr
(
c
k
)
(
1
k
)
ij
=
(
c
k
)
ij
p
k
( c)
(
/
k
)
ij
q
k
( c) =
(
1
k
)
( c)
2"
2D
(
1
k
)
( c)
2"
2D
=
1
2
.
( (
c
k
)
11
(
c
k
)
22
)
2
+4
(
c
k
)
12
2
R;CH$S
On d@init de plus les tenseurs identit d'ordre # Rpour c"aque planS :
(
/
k
)
ij
= 6
i
k
j
k
e
i
k
e
j
k
/
ij
= 6
i j
e
i
e
j
i
k
= 1+m/d ( k ,3)
j
k
= 1+m/d ( k+1,3)
R;CH#S
Ci/dessous7 on retroue l'expression de dries interenant A plusieurs reprises
pour le calcul de la matrice %acobienne locale par exemple :
c
ij
c
rs
= /
ijrs
p
c
rs
=
1
3
/
rs
p
k
c
rs
=
1
2
(
/
k
)
rs
q
k
(
1
k
)
rs
=
1
2q
k
(
1
k
)
rs
(
1
k
)
ij
c
rs
=
(
De4
k
)
ijrs
R;CH=S
On remarque de plus que (
De4
k
)
ijrs
(
1
k
)
rs
=
(
1
k
)
ij
C
+our les quantits mises en %eu aec les mcanismes diatoires7 les relations sui/
antes permettent de donner l'expression de di@@rentes dries :
#&8 ;C# Calcul analytique de la matrice tan!ente d'int!ration locale
q
k
c
( 1
k
c
)
rs
=
( 1
k
c
)
rs
2q
k
c
( 1
k
c
)
ij
c
rs
= ( De4
k
)
ijrs
F ( c ,c
v
p
)b"
2
( ( 4
k
H
)
ij
+(t
k
H
)
ij
r
k
c
) ( /
k
)
rs
R;CHHS
On remarque de plus que
(
De4
k
)
ijrs
(
1
k
c
)
rs
=
(
1
k
c
)
ij
C
On utilise la notation de Lalpole/CoUin des tenseurs d'ordre # et HC
(
1
k
)
ij
=
(
1
i
k
i
k
1
j
k
j
k
.
2 1
i
k
j
k
)
=
(
1
i
k
i
k
1
i
k
i
k
.
2 1
i
k
j
k
)
<
(
/
k
)
ij
=
(
1
1
0
)
( k)
<
(
De4
k
)
ijrs
=
1
2
(
1 1 0
1 1 0
0 0 2
)
R;CH9S
On obtient !alement :
(
1
k
)
ij
(
1
k
)
rs
=
(
1
i
k
i
k
2
1
i
k
i
k
2
.21
i
k
i
k
1
i
k
j
k
1
i
k
i
k
2
1
i
k
i
k
2
.21
i
k
i
k
1
i
k
j
k
.2 1
i
k
i
k
1
i
k
j
k
.2 1
i
k
i
k
1
i
k
j
k
2 1
i
k
j
k
2 )
R;CHFS
(
1
k
)
ij
(
/
k
)
rs
=
(
1
i
k
i
k
1
i
k
i
k
0
1
i
k
i
k
1
i
k
i
k
0
.
21
i
k
j
k
.
21
i
k
j
k
0
)
R;CH:S
(
/
k
)
ij
(
/
k
)
rs
=
(
1 1 0
1 1 0
0 0 0
)
R;CH8S
; Annexes #&;
D-4 Ess&i c(c#i3e in*is&nt ne r!t&ti!n *e #8t&t *e
c!ntr&intes
L'essai ralis s'appuie sur les essais
exprimentaux raliss par +radel et alC R$;;&S
sur le sable de ToyouraC Ces essais permettent
de mettre en idence l'e@@et de la rotation des
axes principaux des contraintes sur les courbes
rponses du matriau et l'importance du rMle
%ou par l'anisotropieC
2ans le cadre de leurs essais7 +radel et alC se
sont intresss au point d'entre en plasticit de
matriaux lEc"e R D%=32% S et dense R
D%=&0% S suiant di@@rents c"emins de
c"ar!ementC +our l'ensemble des essais
raliss7 une pression de con@inement e@@ectie
initiale est @ixe A une aleur de '(,1kPa C
L'appareil utilis durant ces essais est un
appareil de cisaillement en torsion Rprsent sur
l'illustration ;C$SC L'appareil permet un contrMle
de la @orce axiale et de torsionC Le cylindre de lDc"antillon utilis A un rayon intrieur
de =& mm7 extrieur de 9& mm et une "auteur de $;= mmC L'tat de contraintes
dans l'c"antillon est prsent sur l'illustration ;C#C
Le principe des c"emins de c"ar!ement suiis est
montr sur la @i!ure ;C=C ,l a t utilis pour
caractriser l'eneloppe de la sur@ace de c"ar!e
plastique des sablesC Ce c"emin de contraintes
consiste dans un premier temps A !arder une
direction des axes principaux des contraintes @ixe A
un an!le donn o
c
C -nsuite une rotation des axes
des contraintes aec un an!le Ao
c
=1! de!rs
est applique7 suiie dDun rec"ar!ement le lon! de la
direction o
c
+Ao
c
C
Le test men reprend la con@i!uration
2o
c
='0 de!rs en utilisant un sable dense
de ToyouraC
Les essais on t raliss en contrMlant les
contraintes erticales et les contraintes de
cisaillement e@@ecties tout en maintenant une
aleur constante pour
c
r
=c
0
C
Le c"emin suii et les aleurs utilises
numriquement sont identiques A celles des
essais exprimentauxC
Les proprits matriaux ont t calibres A
partir des rsultats de la t"4se de Costa
Illustration ".' : #ra6et de c-argement
sui5i pour caractriser la surface de
c-arge (Lradel et al. (1""!))
Illustration ".1 : /ppareil de
cisaillement en torsion (Lradel et al.
(1""!))
Illustration ".2 : (tat de
contraintes dans l'c-antillon
durant les essais
#$& ;C= -ssai cyclique induisant une rotation de l'tat de contraintes
2'A!uiar R#&&8SC
PARAMETRES
TOQOURA
DRRCAK
PARAMETRES
TOQOURA
DRRCAK
#
0
(k#+) /;8C$
ETAT CRITILUE H PLASTICITE PAR"
FAITE
ELASTICITE
=#
K ( "#+) #;F
9&
G( "#+) ###
=79
n
e
&7H
b
&7##
#
ref
( "#+) /$ #
7!
( "#+) /=79
LOI D8ECOULEMENT H ECROUISSAGE SEUIL DES DOMAINES
=#
r
, m)n
el+
&7&&9
+
m)n
&7&$&
r
,c-c
el+
&7&&9
+
c-c
&7&&&$ r
h-s
&7&=
c
m)n
&7&F r
m)b
&78
c
c-c
&7&=
r
is)
el+
&7&&&$
,
m
$ o $79
T&%#e& D-/ $ Pr!0rits m&tri& * s&%#e *e T!(!r& = DRRCAK t&%#ies 0&r
C!st& D8A5i&r @/AAEB
Les rsultats obtenus lors de cet essai sont prsents sur l'illustration ;CH dans les
plans
(
c
.
c
0
2
,c
0.
)
et (
c
0 .
, c
0 .
) C
L'intrBt de cet essai dans le cadre de ce traail porte sur la rotation des axes
Illustration ".* : 2ponse du mod$le de :u6eu9 pour l'essai E 2o
c
='0 degrs sur sable
de #o>oura dense dans les plans
(
c
.
c
0
2
,c
0.
)
et (
c
0 .
, c
0 .
)
; Annexes #$$
principaux de l'tat de contrainte sollicitant les mcanismes cycliques diatoires du
mod4le de (u%euxC -n e@@et7 l'ensemble des essais pralablement raliss tels que
les essais triaxiaux ou biaxiaux monotones ou cycliques n'introduisent pas de
rotation des axes principauxC La aleur de la @onction
k
c
Rd@inie A l'quation =C#:S
est constante pour ces c"emins de c"ar!ementC Seule la rotation des axes
principaux de l'tat de contraintes permet de @aire arier la @onction
k
c
et d'en
caractriser son olutionC
#$# ;C= -ssai cyclique induisant une rotation de l'tat de contraintes
; Annexes #$=
D-9 Ess&i %i&.i&# *r&in sr s&%#e *8H!stn
D-9-, M!*+#e #ment 2ini
Un essai biaxial drain simule un essai de laboratoire oZ la pression interstitielle est
suppose rester constante durant l'essaiC L'essai est modlis par consquent en
mcanique pure en con@i!uration #27 les d@ormations "ors/plan tant supposes
nullesC Un c"ar!ement constant de compression est maintenu sur les parois
latrales de l'c"antillonC Un crasement axial est impos en tBte de l'c"antillon par
dplacementC Les c"amps de contraintes et de d@ormations sont "omo!4nes dans
l'c"antillon durant l'int!ralit de l'essaiC
Lors des simulations aec CodeTAster7 l'essai biaxial est e@@ectu sur un unique
lment @ini isoparamtrique de @orme carre ]UA287 A "uit nbuds7 int!r sur ;
points de GaussC La lon!ueur de c"aque arBte est prise !ale A l'unit7 1m C Le
mailla!e utilis pour cet essai est prsent sur l'illustration ;C9C 2ans le mod4le
considr7 l'lment carr reprsente un quart de l'c"antillonC Les conditions aux
limites sont donc les suiantes :
Conditions de symtrie :
U
-
=0
A la base de l'c"antillon [
U
,
=0
sur la paroi latrale !auc"e de
l'c"antillonC
Conditions de pression latrale sur la paroi
latrale droite [
Conditions de c"ar!ement axial par
dplacement successi@ %usqu'A
U
-
=0,!m
7 correspondant A !0% de d@ormations
axialesC
Le c"ar!ement d'crasement axial est impos en tBte de l'c"antillon7 apr4s aoir
a@@ect un tat de contrainte isotrope dans l'c"antillon
c
,,
=c
--
=c
..
=30k#+
7
A l'quilibre aec la pression latrale impose sur les bords libresC
Les proprits matriaux utilises pour reprsenter le comportement d'un sable
d'(ostun moyennement dense A D%=40% sont prcises dans le tableau ;C=C
+our rappel7 la densit relatie d'un matriau sableux est donne par la relation
suiante :
D%( %)=
e
m+,
e
0
e
m+,
e
min
R;C$S
oZ
e
m+,
7
e
min
et
e
0
dsi!nent l'indice des ides maximum7 minimum et initialC
Les termes j
s
7 j
e
7 B 7 + 7
K
int
et
K
e
7 introduits dans le tableau ;C=7
sont d@inis comme suit :
Illustration ".1 : <omtrie et
conditions au9 limites
appli)ues pour un essai
bia9ial drain
#$H ;CH -ssai biaxial drain sur sable d'(ostun
j
s
: masse olumique du squelette7
j
e
: masse olumique de l'eau7
B : nombre de )iot7
+ : iscosit du milieu poreux7
K
int
: permabilit intrins4que7
K
e
: coe@@icient de compressibilit de l'eauC
Pr!0rits
m&tri&.
SAPLE
Pr!0rits
m&tri&.
SAPLE
Pr!0rits
m&tri&.
SAPLE
M!*+#e *e H1e.
L!i *8c!#ement H cr!iss&5e
is!tr!0e
Pr!0rits 7(*r&#i3es
C!n2inement is!tr!0e
initi&#
==
j
s
| kg/ m
3
#:&&
#
0
| "#+ /&7&= +
m)n
&7&&8
j
e
| kg / m
3
$&&&
#&sticit +
c-c
&7&&&$
B
$7&
K | "#+ 9$F7# c
m)n
&7#
+
10
3
G | "#+ #=87# c
c-c
&7$
K
int
| m
3
/ kg / s 10
(
n
e
&7H ,
m
$
H
8
| #+
1
10
10
#
ref
| "#+ /$7& Sei# *es *!m&ines porosit
0,42!
t&t criti3e H P#&sticit 0&r2&ite
r
el+
&7&&9
==
r
el+
is)
&7&&$
#H r
h-s
&7&9
#79 r
m)b
&7;&
b
&7#
o
$7&
#
c!
| "#+ /$7&
T&%#e& D-4 $ Pr!0rits m&tri&. ti#ises t&%#is 0&r L!0eF"C&%&##er! et &#-
@/AA4%B
D-9-/ Rs#t&ts *e #8t*e
L'ensemble des rsultats prsents sont issus du lo!iciel CodeTAster7 en
supprimant la possibilit A l'al!orit"me local d'int!ration d'e@@ectuer des sous/
incrments du c"ar!ement7 selon les crit4res noncs aux quations HC9 et HC#9C
Ces crit4res tablis au YHC# et YHC=CH sont inacti@s7 dans le but de tester la capacit
premi4re des deloppements e@@ectus pour int!rer le mod4le de (u%eux suiant
un sc"ma purement impliciteC
La coner!ence du syst4me non linaire local est considre acquise pour un
rsidu in@rieur A
10
(
et la coner!ence au nieau !lobal pour un rsidu in@rieur
A
10
(
C
; Annexes #$9
&.4.2.1 ,rcision des rsultats
Les rsultats prsents ci/dessous reprennent les rponses du lo!iciels CodeTAster
pour di@@rents nieaux d'incrments de c"ar!ementC Ces rsultats sont exprims
dans le plan de contraintes ( p' , q) Rillustration ;C:aS7 le plan mixte (
c
--
, q
)
Rillustration ;CFS7 le plan (
c
--
, c
v
) Rillustration ;C:bS et le plan
(c
--
, r
k
ev
)
Rillustration
;C8SC Les incrments de c"ar!ement
c
--
utiliss sont
| 0,1% , < 0,0!%< 0,01%< 0,00!%< 0,001% C +our des aleurs d'incrments de
c"ar!ement suprieur7 l'al!orit"me local d'int!ration du mod4le de (u%eux dier!eC
Le matriau considr A ce taux de con@inement initial montre un comportement
dilatant aec un pic en contrainte diatoire pour
c
--
=!%
C Ce c"emin de
c"ar!ement sollicite pour le mod4le de (u%eux les trois mcanismes diatoires et
le mcanisme isotropeC Au cours du c"ar!ement R
c
--
-10%
S7 une dc"ar!e
apparaQt pour le mcanisme "ors/plan de normale - 7 qui indique une rduction
Ren aleur absolueS de la contrainte normale au plan de l'essai7
c
..
Rolution du
rayon diatoire cyclique r
,
c
7 illustration ;C8SC
Illustration ".B : 2ponse du mod$le de :u6eu9 E un c-emin bia9ial drain dans le plan
(
c
--
, q
) pour un sable d':ostun a5ec c
,,
=30k#+
Illustration ".& : 2ponse du mod$le de :u6eu9 E un c-emin bia9ial drain dans les plans pour
un sable d':ostun a5ec c
,,
=30k#+
#$F ;CH -ssai biaxial drain sur sable d'(ostun
La !amme d'incrments de c"ar!ement utilise permet de montrer une tr4s l!4re
dpendance des rsultats A ces incrmentsC Lorsque l'al!orit"me itrati@ local
coner!e7 les rsultats apparaissent prcis et peu sensibles aux incrments de
c"ar!ementC L'illustration ;C; prsente l'olution de la contrainte diatoire au pic
de contrainte q en @onction du nombre d'incrments ncessaires pour mener
l'essai %usqu'A
c
--
=!0%
C L'erreur relatie maximum est in@rieure A 0,4% et
l'olution du maximum de q est strictement monotone en @onction du nombre
d'incrments utilissC La prcision de l'approc"e implicite est remarquable et !arantit
pour les nieaux de c"ar!ement les plus @orts un interalle de tolrance tr4s @aibleC
-n superposition des rsultats @ournis par CodeTAster7 les li!nes bleues
discontinues aec des carrs reprsentent l'olution du maximum du diateur
q en @onction du nombre d'incrments demands pour le lo!iciel LaUyerC Les
Illustration ".0 : (5olution des ra>ons d5iatoires et isotropes du mod$le de :u6eu9 pour un
sable d':ostun a5ec c
,,
=30k#+
r
m
r
c
Illustration "." : Paleur au pic de contrainte d5iatoire (gauc-e) et erreur relati5e sur le pic de
contrainte (droite) en fonction de la discrtisation impose
; Annexes #$:
rsultats de LaUyer sont tablis en laissant la possibilit A l'al!orit"me local
d'e@@ectuer un redcoupa!e local A "auteur de $&& et !alement la possibilit de
poursuire le calcul sans aoir obtenu coner!enceC +our des crit4res plus serrs7
l'al!orit"me implant dans LaUyer n'est pas en mesure de @ournir de rsultats
completsC
La coner!ence de l'al!orit"me explicite aec sous/incrmentations ne prsente
pas un pro@il monotone de coner!enceC On constate !alement que pour obtenir
une prcision quialente sur le diateur maximal de l'ordre de 0,2% 7 il est
ncessaire d'appliquer un @acteur de ra@@inement !al A !0 C *anmoins7 lorsque
la coner!ence est tablie pour les deux al!orit"mes7 les rsultats sont tr4s proc"es
pour l'ensemble des ariables d'tat du mod4leC
&.4.2.2 Con1er0ence locale
L'tude de la coner!ence locale du mod4le de comportement est quialente A
l'tude de l'al!orit"me local de *eUton serant A rsoudre le syst4me non linaire
des quations du mod4leC 2eux re!ards sur le comportement de cet al!orit"me sont
ports au cours du c"ar!ementC L'ensemble des rsultats prsents ci/dessous sont
tablis A partir de la simulation ralise pour des incrments de c"ar!ement
Ac
--
=0,1%
C La coner!ence locale est considre acquise lorsque
%( A%
j+1
)<10
(
Rquation HC## du YHC=C=CH SC
Au premier incrment de c"ar!ement et apr4s
c
--
=(%
7 le mod4le de (u%eux
compte deux mcanismes diatoires monotones et le mcanisme isotrope
monotone acti@sC Le syst4me non linaire A rsoudre est donc compos de trei3e
quations :
six quations pour l'quilibre des quations d'tat7 ( LE)
ij
7
une quation pour l'olution de la d@ormation olumique plastique7
( LEVP) 7
trois quations portant sur l'olution des de!rs de mobilisation des
di@@rents mcanismes acti@s7
(
LR
k
K
)
7
trois quations pour le respect des seuils de plasticit7 (
LF
k
K
) C
Les composantes de contraintes de cisaillement ne sont pas reprsentes7 car elles
n'interiennent pas durant un essai biaxial drainC
Au premier incrment de c"ar!ement7 les olutions locales les plus @ortes se
reportent sur les rayons des mcanismes diatoires7 les contraintes et la
d@ormation olumique plastiqueC La coner!ence locale du syst4me d'quations est
obtenue en quatre itrations7 aleur relatiement @aibleC
Les rsidus ports par les contraintes7 la d@ormation olumique plastique et les
rayons diatoires suient une olution relatiement "omo!4ne de pente @aible7
tandis que les rsidus relati@s au mcanisme isotrope suient une olution plus
@orte ers la solution coner!e Rillustration ;C$$SC On remarque !alement que
l'quilibre des seuils des di@@rents mcanismes est atteint plus rapidement que pour
les autres quations du syst4me non linaire A rsoudreC Cette di@@rence peut
s'expliquer par la N concentration O de non/linarit pour les quations d'tat
( LE)
ij
et l'olution de la ariable de coupla!e ( LEVP) C
#$8 ;CH -ssai biaxial drain sur sable d'(ostun
Apr4s (% de d@ormations axiales Rp"ase d'adoucissement du matriauS7 la
coner!ence du syst4me est obtenue apr4s cinq itrations localesC La contribution
des rayons diatoires est beaucoup moins @orte pour ce nieau de c"ar!ement et
leur olution beaucoup plus @aibleC Ce point est con@irm par l'illustration ;C$=7 oZ
les rsidus sont beaucoup plus @orts pour les quations relaties aux contraintes et
A la d@ormation olumique plastiqueC L'ensemble des rsidus suient une olution
Illustration ".1! : (5olution des 5ariables locales pendant l'intgration du mod$le de :u6eu9 pour
le premier incrment de c-argement
Illustration ".11 : (5olution du rsidu de l'algorit-me de rsolution local au 1
er
incrment de
c-argement
; Annexes #$;
relatiement stableC Les taux de coner!ence sont nanmoins plus @orts pour les
quations portant sur les rayons et les sur@aces de c"ar!eC Sur l'illustration ;C$#7 on
constate une di@@rence importante entre les aleurs des multiplicateurs plastiquesC
Le mcanisme acti@ dans le plan de c"ar!ement7 ( , , -) 7 est prpondrant A cet
instant du c"ar!ementC
Illustration ".12 : (5olution des 5ariables locales pendant l'intgration du mod$le de :u6eu9 E
c
--
=(% (p-ase d'adoucissement)
Illustration ".1' : (5olution du rsidu de l'algorit-me de rsolution local au premier
incrment de c-argement
##& ;CH -ssai biaxial drain sur sable d'(ostun
&.4.2.3 Con1er0ence 0lo3ale
Ce para!rap"e s'attac"e A obserer le comportement de l'al!orit"me de rsolution
!lobale portant sur l'quilibre mcanique du probl4me aux limites posC Ce
comportement est conditionn par la qualit de l'oprateur tan!ent local d@ini au
nieau du mod4le de comportementC L'oprateur tan!ent disponible pour le mod4le
de (u%eux n'est pas l'oprateur tan!ent consistant aec le sc"ma d'int!ration
implicite mis en placeC Le taux de coner!ence quadratique de l'al!orit"me est
seulement assur pour des incrments de c"ar!ement @aiblesC L'illustration ;C$H
con@irme ce point et le taux de coner!ence se d!rade aec l'au!mentation de la
aleur des incrments de c"ar!ementC
Au premier incrment de c"ar!ement commun A c"aque discrtisation impose7 le
taux de coner!ence !lobale ne respecte pas une pente quadratique ers la
solution sau@ pour le taux d'incrment le plus @aible7
Ac
--
=0,001%
Rillustration
;C$HaSC Les premiers incrments apparaissent di@@iciles A int!rer puisque pour le
taux d'incrments !al A
Ac
--
=0,1%
7 un sous/dcoupa!e du c"ar!ement
s'a4re ncessaire Rl'olution portant sur les rayons diatoires y est tr4s
importanteSC Les courbes de coner!ence sont donc con@ondues pour les aleurs
d'incrments de
Ac
--
=0,1%
et
Ac
--
=0,0!%
C Le pro@il de coner!ence suit
une pente @aible pour l'ensemble des incrments de d@ormations suprieurs A
Ac
--
>0,001%
C
Apr4s
c
--
=(%
Rp"ase d'adoucissement
du comportement du matriauS7 le taux de
coner!ence suii pour les di@@rentes
aleurs d'incrments olue r!uli4rement
en @onction de ces mBmes aleurs
d'incrments de c"ar!ementC Le taux de
coner!ence quadratique semble atteint
pour
Ac
--
<0,01%
Rillustration ;C$HbSC
L'illustration ;C$& permet de reprsenter7
en @onction du nombre d'incrments
Illustration ".1* : (5olution du rsidu global au premier incrment de c-argement(gauc-e . a)
et apr$s c
--
=(% (droite . b) pour un sable d':ostun E c
,,
=30k#+
Illustration ".11 : (5olution du nombre
d'incrments raliss en fonction du nombre
d'incrments demands
; Annexes ##$
demands7 le nombre rel d'incrments raliss par le code de calculC -n e@@et7 lors
de la modlisation de l'essai7 un sous/dcoupa!e automatique a t mis en place
pour permettre en cas d'c"ec d'int!ration locale ou en cas de dier!ence de
l'al!orit"me de *eUton/'ap"son !lobal une poursuite de l'essaiC Les rsultats
montrent que pour un nombre d'incrments !al A #&&7 correspondant A
Ac
--
=0,2!%
7 le nombre d'incrment e@@ectu correspond A plus du double de la
aleur initialeC -n reanc"e7 pour
Ac
--
=0,1%
7 certes il subsiste des sous/
dcoupa!es7 mais le nombre obtenu est beaucoup plus proc"e du nombre
d'incrments demandsC
D-9-4 Ret!r sr #es rs#t&ts *e #8ess&i %i&.i&# *r&in
Les premiers rsultats obtenus aec le sc"ma d'int!ration implicite sont tr4s
encoura!eantsC Les aleurs retroues pour les ariables d'tat7 telles que l'tat de
contraintes et les ariables internes du mod4le sont identiques entre les deux codes
de calcul lorsqu'ils ont atteints respectiement la coner!ence de leurs rsultatsC
+our ce tra%et de c"ar!ement7 le sc"ma d'int!ration implicite a tout d'abord
dmontr sa capacit A obtenir lorsqu'il coner!e des aleurs prcises pour les
ariables d'tatC On a notamment rele pour la aleur maximale au pic de
contraintes7 pour une prcision de 0,2% d'erreur7 un nieau d'incrments de
c"ar!ement 9& @ois plus lar!e pour le sc"ma implicite que le nieau d'incrments
appliqu au sc"ma explicite aec sous/incrmentsC
-n reanc"e7 pour des incrments de c"ar!ement trop importants7 l'al!orit"me est
mis en d@autC ,l est alors ncessaire pour une utilisation industrielle dans le cadre
d'tudes sur des structures !otec"niques d'introduire des crit4res de sous/
incrmentations a@in d'assurer une coner!ence locale pour une !amme de
c"ar!ement plus tendue Roir YHC# et YHC=CH SC
2ans le cadre de cet essai7 la rsolution du syst4me d'quations non linaires
locales apparaQt stable et monotone dans son ensembleC Le nombre d'itrations
locales reste limit A 9 ce qui assure d'obtenir des rsultats aec ce sc"ma dans
un dlai raisonnableC
Les qualits de l'oprateur tan!ent continu sont en accord aec nos attentes7
puisque le taux de coner!ence quadratique est obtenu A partir d'une aleur de
c"ar!ement applique A c"aque incrmentC
### ;CH -ssai biaxial drain sur sable d'(ostun
; Annexes ##=
D-: Ess&i tri&.i&# n!n *r&in c(c#i3e
D-:-, M!*+#e #ment 2ini
Un essai triaxial non drain cyclique
consiste A appliquer sur un
c"antillon une succession de
c"ar!e<dc"ar!e en tBte Rou A la
baseS de l'c"antillonC Le terme non/
drain prcise que le @lux
"ydraulique est nul aux @ronti4res de
l'c"antillonC Cette succession de
c"ar!e<dc"ar!e !n4re7 pour les
sols !ranulaires lEc"es7 une monte
de la pression "ydraulique dans
l'c"antillon et conduit au
p"nom4ne de mobilit cycliqueC
Le mailla!e utilis est un lment cubique (-dA#&7 int!r sur #: points de Gauss7
reprsentant 1/( de l'c"antillon Rillustration ;C$FSC
Les proprits matriaux utilises sont prsentes dans le tableau ;C=C
Les conditions aux limites appliques aux bords de l'c"antillon sont les suiantes :
les dplacements sont bloqus sur les @aces aant R '
-
=0 S7 latrale !auc"e R
'
,
=0 S et in@rieure R '
.
=0 SC
Le c"ar!ement appliqu durant l'essai est dcrit comme suitC -n maintenant sur les
@aces arri4re et latrale droite une pression !ale A
#
0
=30kPa
7 on applique un
c"ar!ement alternati@ en pression dDamplitude Ac !ale A 1!k#+ sur la @ace
suprieure7 de @a0on A obtenir une ariation de la contrainte erticale
c
..
dans
lDc"antillon comprise dans lDinteralle R 4!k#+<c
..
<1!k#+ aec la
conention de si!ne N # O pour la compressionSC
D-:-/ Rs#t&ts *e #8t*e
L'ensemble des rsultats prsents7 issus du lo!iciel CodeTAster7 ont t obtenus
en interdisant A l'al!orit"me local d'int!ration d'e@@ectuer des sous/incrments du
c"ar!ement7 comme prcis au Y;CH C
La coner!ence du syst4me non linaire local est considre acquise pour un
rsidu in@rieur A
10
(
et la coner!ence au nieau !lobal pour un rsidu in@rieur
A
10
(
C
Illustration ".1B : 3aillage utilis pour l'essai tria9ial
non drain c>cli)ue
##H ;C9 -ssai triaxial non drain cyclique
&.5.2.1 ,rcision des rsultats
Les rsultats prsents ci/dessous reprennent les rponses des lo!iciels
CodeTAster et LaUyer pour di@@rents nieaux d'incrments de c"ar!ementC Ces
rsultats sont exprims dans le plan de contraintes ( p' , q) Rillustration ;C$:S7 le
plan mixte (
c
..
, q
) Rillustration ;C$8S et en @onction des rayons diatoires
mobiliss
8
Rillustration ;C$;SC Le tableau ;CH permet de caractriser la nomenclature
des essais raliss :
Ac NP&O C!*eSAster L&)(er
$9&&& Aster #p LaUyer #p
=&&& Aster $&p LaUyer$&p
:9& LaUyer H&p
F&& Aster 9&p
=&& LaUyer $&&p
$9& Aster #&&p
=& Aster $&&&p LaUyer $&&&p
T&%#e& D-9 $ Rc&0it#&ti2 *es incrments *e c7&r5ement ti#iss 0!r m!*#i"
ser #8ess&i tri&.i&# n!n *r&in c(c#i3e
L'essai modlis permet de reprsenter le comportement de liqu@action du sol7
caractris par une perte brutale de la rsistance du matriau en dbut de troisi4me
cycle de c"ar!ement Rillustration ;C$8SC
8 Les rayons diatoires mobiliss sont d@inis comme suit r
k
m)b
=
q
k
p
k
F
k
Illustration ".1& : Cssai tria9ial non drain c>cli)ue reprsent dans le plan ( p' , q)
modlis a5ec +ode;/ster
2 cycles
2.5 cycles
; Annexes ##9
L'olution des rayons diatoires mobiliss au cours de l'essai permet de constater
un crouissa!e pro!ressi@ des seuils diatoires monotonesC On constate tout de
mBme que le p"nom4ne de liqu@action se produit aant d'atteindre l'tat de
plasticit par@aite R r
k
m)b
<1 SC
On constate une sensibilit l!4re des rsultats A la discrtisation du c"ar!ement
imposC *anmoins7 les rsultats coner!ent r!uli4rement ers une aleur limite
Illustration ".10 : Cssai tria9ial non drain c>cli)ue reprsent dans le plan (
c
..
, q
)
modlis a5ec +ode;/ster
Illustration ".1" : Cssai tria9ial non drain c>cli)ue . (5olution du ra>on d5iatoire mobilis en
fonction du d5iateur de contrainte
##F ;C9 -ssai triaxial non drain cyclique
au @ur et A mesure du ra@@inement des incrments de c"ar!ementC
Une comparaison de ce comportement a t mene en parall4le aec le lo!iciel
LaUyer et les conclusions apparaissent di@@rentesC Les simulations ont t menes
en laissant la possibilit A l'al!orit"me local explicite d'e@@ectuer des redcoupa!es
limits au nombre de $&&C Les rsultats de LaUyer sont !alement poursuiis en
cas de non coner!ence localeC Sans ces arti@ices7 LaUyer n'aurait pas t en
mesure de produire ces rsultatsC
La coner!ence r!uli4re des
rsultats ers une aleur @i!e ne
s'obsere pas pour le lo!iciel
LaUyerC -n reanc"e7 les aleurs
@inales obtenues A coner!ence
pour les deux codes sont tr4s
proc"es les unes des autres pour
deux points distincts reles
durant l'essaiC La comparaison est
e@@ectue sur la aleur de la
pression isotrope de l'c"antillon
apr4s # cycles et #79 cycles7 c'est
A dire pour les aleurs de
c"ar!ement oZ la aleur du
diateur des contraintes s'annule
Roir illustration ;C$:SC Les rsultats
sont prsents sur l'illustration
;C#&C
Le nombre d'incrments prcis comme axe des abscisses de l'illustration ;C#& @ait
r@rence au nombre d'incrments par cycle de c"ar!ement durant l'essai Rc@
tableau ;CHSC L'cart relati@ obser en @onction du ra@@inement du c"ar!ement entre
les deux codes est beaucoup plus serr pour le CodeTAsterC La prcision de
l'approc"e implicite est remarquable et !arantit mBme pour les nieaux de
c"ar!ement les plus @orts un interalle de tolrance tr4s @aibleC
&.5.2.2 Con1er0ence locale
L'tude de la coner!ence locale du mod4le de comportement est quialente A
l'tude de l'al!orit"me local de *eUton serant A rsoudre le syst4me non linaire
des quations du mod4leC 2i@@rentes p"otos du comportement de cet al!orit"me
sont prises au cours du c"ar!ementC
Apr4s #79 cycles de c"ar!ement7 le mod4le de (u%eux compte deux mcanismes
diatoires cycliques et un mcanisme isotrope cyclique acti@sC Le syst4me non
linaire A rsoudre est donc compos de trei3e quations :
six quations pour l'quilibre des quations d'tat7 ( LE)
ij
7
une quation pour l'olution de la d@ormation olumique plastique7
( LEVP) 7
trois quations portant sur l'olution des de!rs de mobilisation des
Illustration ".2! : (5olution de la pression isotrope
de l'c-antillon en deu9 points de c-argement en
fonction de la discrtisation du c-argement
; Annexes ##:
di@@rents mcanismes acti@s7
( LR
k
K
)
7
trois quations pour le respect des seuils de plasticit7 ( LF
k
K
) C
Le c"ar!ement appliqu est isotrope "ori3ontalementC Le mod4le de (u%eux est
donc dcrit par l'actiation de deux mcanismes diatoires A olutions identiques
R "
1
K
et "
2
K
SC Sur l'illustration ;C#$7 une seule composante "ori3ontale est
prsente ( LE)
,,
7 de mBme qu'un seul de!r de mobilisation diatoire cyclique
( LR
dev
c
)
7 et un unique seuil de plasticit pour les mcanismes diatoires
cycliques
( LF
dev
c
)
C Les composantes de contraintes de cisaillement ne sont pas
reprsentes7 car elles n'interiennent pas durant cet essai triaxial non drain
cycliqueC
La limite de prcision demande A l'al!orit"me de *eUton R@ixe pour cet exemple A
10
(
S est atteinte en sept itrations localesC Les rsidus relati@s aux quations
d'tat ( LE)
ij
et A la d@ormation olumique plastique ( LEVP) montrent un taux
de coner!ence in@rieur A celui obser pour les quations
(
LR
k
K
)
et
(
LF
k
K
)
C
L'illustration ;C## permet d'apprcier le taux de coner!ence des inconnues du
syst4me ers leurs aleurs @inalesC
Illustration ".21 : +on5ergence locale du mod$le de :u6eu9 apr$s 21 c>cles de c-argement
##8 ;C9 -ssai triaxial non drain cyclique
Les rsultats montrent une coner!ence rapide pour l'ensemble des inconnues du
syst4me apr4s la troisi4me itration de corrections plastiquesC Les corrections
plastiques ne conduisent pas ncessairement A une olution r!uli4re et monotone
des inconnues au cours des itrations7 mal!r la monotonie du c"ar!ement A cet
instant du c"ar!ementC
Un re!ard sur des points de passa!e du c"ar!ement !nrant la cration de
noueaux seuils cycliques est intressant pour %usti@ier et con@orter les c"oix
"euristiques raliss au cours des deloppements pour l'int!ration du mod4le de
(u%eux dans CodeTAsterC ,l s'a!it notamment du prdicteur lastique c"oisi apr4s
un premier c"ec local de l'int!ration du mod4le Rc@ YHC=C9 SC
L'instant de c"ar!ement analys se situe A prsent apr4s &7#9 cycle de c"ar!ement7
qui est le premier incrment de c"ar!ement conduisant A une dc"ar!e de
l'c"antillonC A l'instant de c"ar!ement prcdent7 deux mcanismes diatoires
monotones sont acti@s et un mcanisme isotrope cycliqueC Cette dc"ar!e doit
conduire A initialiser puis crouir des mcanismes diatoires cycliquesC
L'ide de l'analyse consiste A re!arder l'olution du domaine des mcanismes
potentiellement acti@s et la coner!ence locale du syst4me d'quations non linaires
en @onction des prdicteurs de contraintesC Le @ocus se porte A la premi4re itration
de correction de l'quilibre !lobal du syst4me mcanique considrC
La procdure de d@inition du domaine potentiel de mcanismes acti@s7
"
p)t
7
propose le couple des deux mcanismes diatoires monotonesC On rappelle que
ces deux mcanismes ont des olutions identiques dues aux conditions de
symtrie du c"ar!ementC La rsolution du syst4me local d'quations non linaires
conduit A obtenir des multiplicateurs plastiques n!ati@s pour les mcanismes
diatoires monotonesC Le c"oix initial de ces mcanismes tait donc erron et il est
Illustration ".22 : +on5ergence des inconnues locales du mod$le de :u6eu9 apr$s 21 c>cles
de c-argement
; Annexes ##;
ncessaire d'y apporter des correctionsC
2es mcanismes diatoires cycliques sont donc considrs et int!rs dans
"
p)t
C L'illustration ;C#= prsente l'olution des rsidus locaux des quations du
syst4me au cours des itrations de corrections plastiques et l'illustration ;C#H
l'olution des inconnues du syst4me non linaire A rsoudreC Le syst4me comporte
A prsent $$ quations non linaires A rsoudre : ( LE)
ij
7 ( LEVP) 7
(
LR
dev
c
)
et
(
LF
dev
c
)
C
Les rponses obtenues prsentent un pro@il de coner!ence tr4s c"a"uts7 aec
des aleurs intermdiaires aberrantes7 obtenues durant les itrations plastiques de
correctionsC On peut notamment si!naler les aleurs n!aties des de!rs de
mobilisation r
ev
c
7 ou encore les tats de contraintes positiesC *anmoins7 mal!r
les di@@icults relees7 l'al!orit"me de *eUton parient @inalement A coner!er pour
l'ensemble du syst4me d'quationsC
-n sortie de rsolution de ce syst4me7 le domaine potentiel de mcanismes acti@s
est A noueau modi@i pour int!rer un noueau mcanisme isotrope cyclique
dtect potentiellement acti@ par l'al!orit"me local de contrMle des mcanismes
acti@s RYHC=C9 SC Le prdicteur lastique7 c
ij
(l+s
7 utilis pour la rsolution du noueau
syst4me non linaire A rsoudre est repris directement de la solution coner!e
Rillustration ;C#HS obtenue pour le prcdent domaine potentiel de mcanismes
acti@s7
"
p)t
C Le syst4me comporte maintenant $= quations non linaires A
rsoudre : ( LE)
ij
7 ( LEVP) 7
(
LR
k
c
)
et
(
LF
k
c
)
C
Illustration ".2' : +on5ergence locale du mod$le de :u6eu9 pour un
"
p)t
donn
#=& ;C9 -ssai triaxial non drain cyclique
Les rsultats obtenus aec ce noueau domaine
"
p)t
Rillustrations ;C#9 et ;C#FS
coner!ent plus rapidement Rdix itrations au lieu de in!t deuxS mais les olutions
des ariables d'tat du syst4me ne sont tou%ours pas r!uli4resC ,l @aut noter que le
taux de coner!ence est @aible sur les premi4res itrations puis7 au!mente A partir
de la quatri4me itrationC Les taux de coner!ence sont plus @orts pour les derni4res
itrations sur les quations
(
LR
dev
c
)
et
(
LF
dev
c
)
C Les aleurs des inconnues du
syst4me restent cette @ois/ci dans leur domaine de alidit A c"aque itration de
correction plastiqueC
On constate7 en reanc"e7 une olution r!uli4re des rsidus locaux pour
l'ensemble des quations du syst4meC On remarque !alement que le rsidu
maximal est port par l'quation
(
LR
dev
c
)
et ceci pour les deux domaines
"
p)t
propossC L'crouissa!e des sur@aces de c"ar!e diatoires cycliques est tr4s
important A cet instant du c"ar!ement Rnaissance et crouissa!e des sur@acesSC
Illustration ".2* : +on5ergence des inconnues locales du mod$le de :u6eu9 apr$s !.21 c>cle
de c-argement
; Annexes #=$
Le comportement de l'al!orit"me d'int!ration locale du mod4le de (u%eux est
@ortement conditionn par la qualit du prdicteur lastique de contraintes c
ij
(l+s
C
Ce prdicteur est quali@i d'lastique7 car les ariables d'crouissa!e ont une
olution nulle durant cette p"aseC *anmoins l'tat de contrainte c
ij
(l+s
n'est pas
ncessairement tabli A partir de la loi lastique non linaire du mod4le de (u%euxC
-n e@@et7 deux cas possibles peuent Btre distin!us conduisant A utiliser d'autres
approc"es pour tablir ce prdicteur :
L'tat de contraintes prcdent est situ sur le ou les seuilRsS de plasticit
Illustration ".21 : (5olution des rsidus locau9 des )uations du s>st$me non linaire
local E rsoudre
Illustration ".2B : +on5ergence des inconnues locales du mod$le de :u6eu9 apr$s !.21 c>cle
de c-argement
#=# ;C9 -ssai triaxial non drain cyclique
d'une ou plusieurs sur@aces de c"ar!e du mod4leC Le prdicteur en
contrainte est alors obtenu en utilisant l'oprateur tan!ent du mod4le d@ini
par les mcanismes plastiques acti@s A l'tat de contrainte prcdentC
Apr4s une premi4re int!ration du mod4le en se basant sur un domaine
potentiel de mcanismes acti@s7
"
p)t
7 de noueaux seuils plastiques ne
sont plus respects ou des mcanismes appartenant A
"
p)t
ont conduit
l'al!orit"me de rsolution A obtenir un multiplicateur plastique n!ati@C Le
prdicteur lastique utilis pour le noueau domaine
"
p)t
est tir de l'tat
de contraintes obtenu en @in d'int!ration pour le domaine
"
p)t
prcdentC
Ces remarques permettent de comprendre le comportement de l'al!orit"me pour les
di@@rents cas prsentsC
Le comportement local prsent apr4s #79 cycles de c"ar!ement coner!e
rapidement ers la solution7 car le prdicteur lastique c
ij
(l+s
a t tabli A
partir de l'oprateur tan!ent bas sur l'tat du matriau A l'instant prcdentC
2ans cette p"ase du c"ar!ement7 l'olution du c"ar!ement y est monotone7
ce qui !arantit un prdicteur de qualitC
Apr4s &7#9 cycle de c"ar!ement 7 pour le deuxi4me domaine "
p)t
considr7 le prdicteur lastique est bas sur l'tat matriau obtenu apr4s
int!ration locale oZ les mcanismes diatoires monotones taient
considrs comme acti@s7 erreur corri!e ensuite7 puisque les multiplicateurs
plastiques de ces mcanismes taient n!ati@sC Le prdicteur lastique est
alors moins co"rent aec l'olution du c"ar!ement qui conduit A une
dc"ar!e des mcanismes diatoires monotonesC L'al!orit"me de
rsolution a donc plus de di@@icults pour quilibrer l'ensemble du syst4me
d'quations R## itrations de correction plastiqueSC
Apr4s &7#9 cycle de c"ar!ement et d@inition du troisi4me domaine "
p)t
7
le prdicteur lastique considr ri@ie les seuils diatoires cycliquesC La
coner!ence de l'al!orit"me local de *eUton est alors beaucoup plus rapide
R: itrations de correction plastiqueS
Le c"oix du prdicteur lastique c
ij
(l+s
est "euristique et des amliorations peuent
encore Btre apportes A cet al!orit"meC +our acclrer la coner!ence de
l'al!orit"me de rsolution7 l'utilisation d'une mt"ode de rec"erc"e linaire serait
une solution sduisante et rapide A mettre en oeure dans le CodeTAster7 puisque
d%A oprationnelle pour d'autres mod4les de comportement du codeC Ce c"oix est
d'ailleurs conseill par Armero et +re3/Fo!uet R#&&#S et ?eremic R#&&$S pour les
al!orit"mes implicites type C++M RY#CF SC
&.5.2.3 Con1er0ence 0lo3ale
Ce para!rap"e s'attac"e A obserer le comportement de l'al!orit"me de rsolution
de l'quilibre !lobal du probl4me aux limites posC Le taux de coner!ence
quadratique de l'al!orit"me est assur pour des incrments de c"ar!ement @aiblesC
L'illustration ;C#: con@irme ce point et le taux de coner!ence se d!rade aec
l'au!mentation de la aleur des incrments de c"ar!ementC
; Annexes #==
Le taux de coner!ence quadratique est retrou pour des incrments de
c"ar!ement de 600 Pa C La coner!ence est considre comme acquise pour cet
exemple lorsque le rsidu est in@rieur A
10
(
C
D-:-4 Ret!r sr #es rs#t&ts *e #8ess&i tri&.i&# n!n *r&in c(c#i3e
L'essai triaxial non drain cyclique a permis de s'assurer de la co"rence des
aleurs obtenues aec le sc"ma d'int!ration implicite en comparaison des
rsultats @ournis par le sc"ma d'int!ration explicite implant dans LaUyerC Les
rsultats ont t compars et alids sur l'ensemble des ariables d'tat et internes
du mod4le de (u%euxC
La coner!ence des rsultats est obtenue rapidement pour des aleurs
d'incrments au moins $& @ois plus lar!es que les aleurs obtenues aec le sc"ma
d'int!ration expliciteC
Cet essai a permis !alement de prsenter le comportement de l'al!orit"me local
d'int!ration implicite du mod4le de (u%eux pour des tra%ets de c"ar!ement
cycliquesC Les approc"es "euristiques mises en place apparaissent e@@icaces pour
raliser l'int!ration du mod4le pour des tra%ets de c"ar!ement cycliques et sont
capables de remettre en cause le domaine
"
p)t
obtenu initialement A partir des
prdicteurs lastiquesC Cet essai a !alement permis de mettre en aant le nombre
important d'itrations ncessaires A l'int!ration du mod4le7 lorsque des
c"an!ements de direction de c"ar!ement suriennentC Le sc"ma de rsolution du
syst4me d'quations non linaires local7 coupl A une mt"ode de rec"erc"e
linaire doit permettre de rduire ce nombre et ainsi diminuer le temps local
consomm pour l'int!ration du mod4leC
Les per@ormances de l'oprateur tan!ent continu sont A noueau en accord aec les
attentes7 puisque la coner!ence quadratique est atteinte en dessous d'une aleur
seuil de la aleur des incrments de c"ar!ementC 2es di@@icults de coner!ence
!lobales sont nanmoins apparues pour des incrments de c"ar!ement proc"es
des c"an!ements de direction de c"ar!ement7 p"nom4ne qui disparaQt aec le
ra@@inement de la discrtisation du c"ar!ement appliquC
Illustration ".2& : (5olution du rsidu sur l')uilibre global de la structure apr$s 2.1
c>cles de c-argement
#=H ;C9 -ssai triaxial non drain cyclique
; Annexes #=9
D-< Ess&i *e cis&i##ement &;ec micr!"*c7&r5es
2ans le cadre de cet exemple7 on ralise un essai de cisaillement cyclique7 contrMl
en @orce7 en mcanique pure Rquialent A des conditions "ydrauliques drainesS
aec le mod4le de (u%euxC Au cours des cycles de c"ar!e/dc"ar!e7 des micro/
dc"ar!es sont ralises pour tester la capacit du mod4le de (u%eux A retrouer le
module de cisaillement croui aant cette micro/dc"ar!eC Les rsultats obtenus
sont compars A des rsultats issus de Code/Aster pour un tra%et de c"ar!ement
cyclique identique sans les micro/dc"ar!es et !alement issus de LaUyerC L'en%eu
de cet essai consiste A ri@ier si la !estion des mcanismes cycliques du mod4le
de (u%eux est correctement tablie lorsque l'tat de contrainte conduit A rencontrer
le point de tan!ence R 4
k
H
7 quation =C##S des sur@aces de c"ar!e cyclique7 tout
en restant dans le domaine lastique des sur@aces de c"ar!e diatoires cycliquesC
Cet essai de cisaillement a t int!r A la base de cas/tests de non r!ression du
CodeTAster sous le nom de SS*1#&:AC
D-<-, G!mtrie
L'essai de cisaillement cyclique est e@@ectu sur un unique point de GaussC ,l est
contrMl int!ralement en contraintes et d@ormations imposesC
D-<-/ Pr!0rits m&tri&.
Les proprits matriaux utilises sont identiques A celles prsentes
prcdemment pour les essais de laboratoire : essai biaxial drain et triaxial non
drain cyclique Rtableau ;C=SC ,l s'a!it d'un sable d'(ostun A D%=40% C
D-<-4 C!n*iti!ns &. #imites et *e c7&r5ements
L'essai de cisaillement cyclique prsent est ralis en mcanique pureC On impose
au nieau local sur le point matriel considr une contrainte de cisaillement
c
,-
7
ariable durant l'essaiC Les composantes
c
,,
7
c
--
et
c
..
sont constantes
durant l'essai et !ales A la aleur de pression de con@inement de
#
0
=!0kPa
C
L'essai ralis correspond A un essai de cisaillement directC
2ans le mod4le considr7 les contraintes
imposes suient l'olution suiante :
+ression de con@inement
constante :
#
0
=c
,,
=c
--
=c
..
=!0kPa
Conditions de c"ar!ement :
c
,-
=F
1
( t ) 7 t correspondant
au temps @icti@ de la modlisation
Le c"ar!ement s'e@@ectue en deux
p"ases :
Un tat de con@inement isotrope
Illustration ".20 : (5olution des contraintes
de cisaillement au cours de l'essai
#=F ;CF -ssai de cisaillement aec micro/dc"ar!es
#
0
=!0kPa
est a@@ect au point matriel considr [
Une contrainte de cisaillement
c
,-
est impose et arie entre t =0 et
t =40 selon la @onction F
1
( t ) Rillustration ;C#8SC La aleur de la micro/
dc"ar!e applique est !ale A 300Pa 7 quialent A un rayon mobilis de
r
m)b
=0,006'2r
el+
, c
( =0,1) assurant de rester dans le domaine lastique
des mcanismes diatoires cycliquesC
On rappelle que la ariable t n'a aucune dimension p"ysique et permet %uste
d'assurer une discrtisation du c"ar!ementC
Une comparaison des rsultats sera mene entre les rsultats du CodeTAster et
LaUyerC
Un essai de comparaison est !alement ralis aec CodeTAster oZ un essai de
cisaillement direct cyclique est ralis sans les micro/dc"ar!esC Les contraintes
c
,-
suient alors la @onction F
2
( t ) Rillustration ;C#8SC
D-<-9 P&r&m+tres nmri3es *e #8t*e
La coner!ence est suppose acquise pour un rsidu !lobal in@rieur A 1e#( 7
aleur identique pour la coner!ence locale du mod4le de (u%eux dans sa
@ormulation impliciteC
D-<-: Rs#t&ts
Les solutions sont obtenues au point
matriel considr et une comparaison
entre les di@@rentes simulations sous
CodeTAster et LaUyer est prsente ci/
dessousC Les rsultats sont prsents sous
di@@rentes @ormesC Les l!endes sont A
transcrire comme suit :
Code/Aster A reprsente les
rsultats aec micro/dc"ar!es [
Code/Aster S reprsente les
rsultats sans micro/dc"ar!es [
LaUyer illustre les rsultats de
LaUyer aec micro/dc"ar!esC
Sur l'illustration ;C#;7 dans le plan (
c
,-
,c
,-
) 7 on remarque un comportement
identique sous CodeTAster pour les c"emins de c"ar!ement aec et sans micro/
dc"ar!esC -n reanc"e7 les rsultats issus de LaUyer sont di@@rents et prsentent
des inco"rences par rapport A la @ormulation initiale du mod4le de (u%euxC -n e@@et7
lors des micro/dc"ar!es7 un crouissa!e in%usti@i Rillustration ;C=&aS est rele sur
les sur@aces de c"ar!e diatoires cycliquesC Cet crouissa!e cr induit un saut
sur la aleur de c
v
p
Rillustration ;C=&bSC 2e plus7 la aleur du module de
cisaillement initiale n'est pas retroue apr4s la p"ase de micro/dc"ar!e7
comportement non prsent sous CodeTAsterC Ce comportement suspect peut Btre
corri! en portant attention au point de tan!ence entre les sur@aces de c"ar!e
Illustration ".2" : Cssai de cisaillement
c>cli)ue a5ec le mod$le de :u6eu9 sur un
sable d':ostun E D%=40%
; Annexes #=:
diatoires cycliques relaties aux mcanismes N p4re O et N @ils OC
Ces rsultats mettent en aant la di@@icult !nre par l'criture des sur@aces de
c"ar!e cycliques diatoires du mod4le de (u%eux7 notamment la condition portant
sur le point de tan!enceC Une !estion au cas par cas des di@@rents scnarii a t
ncessaire pour assurer un comportement robuste et e@@icace du mod4le pour tous
les c"emins de c"ar!ement dcrits %usqu'iciC Les di@@rences constates pour la
!estion des mcanismes cycliques laissent entreoir des di@@icults pour une
comparaison @ine des deux al!orit"mes pour des c"ar!ements sismiques7 par
exempleC
Illustration ".'! : a)(5olution des ra>ons d5iatoires monotones et c>cli)ues du mod$le de
:u6eu9 b) (5olution de c
v
p
; pour un essai de cisaillement c>cli)ue sur sable d':ostun E
D%=40%
#=8 ;CF -ssai de cisaillement aec micro/dc"ar!es
; Annexes #=;
D-C M!*#is&ti!n *8ne *i5e en terre &;ec #e m!*+#e *e H"
1e.
L'ensemble des rsultats prsents dans cette section sont issus du traail de
rec"erc"e de MC5"am R#&&;SC Ce traail consistait A tablir la mt"odolo!ie sous
CodeTAster pour raliser la construction par couc"es et la mise en eau d'une di!ue
en terre "omo!4ne en ue d'une exportation au pMle d'in!nierie "ydraulique de
l'-2F7 le C,(C Ces rsultats permettent de dmontrer la capacit et la robustesse du
mod4le de (u%eux int!r selon un sc"ma implicite de raliser des tudes
industriellesC Ce para!rap"e s'intresse plus particuli4rement A la comparaison des
rsultats obtenus sous CodeTAster A ceux obtenus aec le lo!iciel G-F2yn7 outil de
modlisation r@rence actuel au C,( pour raliser ces tudesC La mt"odolo!ie
mise en place pour raliser les di@@rentes p"ases du calcul ne seront pas
explicites dans leur ensembleC +our une prsentation ex"austie de la mt"ode7 le
lecteur pourra se reporter au document synt"se de MC5"am R#&&;SC
La !omtrie de la di!ue7 puis les conditions de c"ar!ement sont prsents pour
ensuite raliser une comparaison @ine des rsultats obtenus sous CodeTAster et
G-F2ynC
D-C-, Mt7!*!#!5ie 5nr&#e
On adopte une mt"odolo!ie dite multi/mod4les7 similaire A celle prsente au Y9C#
7 pour la p"ase de construction par couc"es de la di!ueC
&.6.1.1 Mise en place de la ondation
Le mod4le initial de l'tude contient uniquement le sol de @ondation quilibr en
imposant un tat de contraintes et de pression "ydraulique !ostatiqueC Les
conditions aux limites adoptes pour l'initialisation du calcul sont :
)loca!e ertical de la base de la @ondation
)loca!e "ori3ontal des parois latrales de la @ondation
Application d'une pression libre mcanique en sur@ace !ale A 10
4
Pa
+ression "ydraulique nulle sur la sur@ace libre
Flux "ydraulique nul sur les bords latraux et la base de la @ondationC
Les conditions initiales appliques au domaine d'tudes sont :
une contrainte e@@ectie !ostatique aec un coe@@icient de pousse des
terres !al A &79C
une pression "ydraulique !ostatique dans la @ondation
&.6.1.2 Construction par couc-es
+our la pose de la ni
4me
couc"e7 il est ncessaire d'y imposer des conditions aux
limites :
pression mcanique !ale A la pression libre sur les bords libres
#H& ;C: Modlisation d'une di!ue en terre aec le mod4le de (u%eux
pression "ydraulique nulle sur les bords libres suprieurs
Le c"ar!ement appliqu lors de cette p"ase se limite A la pesanteurC +our lisser le
c"ar!ement dX A la pose de la nouelle couc"e7 la pesanteur est a@@ecte
pro!ressiement dans la nouelle couc"eC
&.6.1.3 Mise en eau de la di0ue
Le remplissa!e du bassin de retenue est
modlis %usqu'A une cMte d'lation
donneC Ce c"ar!ement est appliqu
pro!ressiement suiant une @onction
linaire dans le tempsC
D-C-/ A00#ic&ti!ns nmri3es
&.6.2.1 Cas d/une di0ue simpliie
Le mailla!e de la di!ue est donn sur l'illustration ;C=#C La composition du sol est
identique dans toute la di!ue Rparam4tres matriaux a@@ic"s sur le tableau ;C9SC -lle
mesure 16m de "aut aec une pente de 2/1 pour une base de @ondation de
&4 m de lar!eC C"aque couc"e de sol a une "auteur de 1m C La dure de la
construction de la di!ue est @ixe A 2,! annes soit eniron
!,10
6
s
pour poser
une couc"eC
La @ondation est modlise par deux couc"es de sol [ la couc"e a@@leurante A la
sur@ace libre est modlise aec le mod4le de (u%eux R%usqu'A 1(,!m de pro@ondS
et la 3one pro@onde par un mod4le lastique reprsentant le comportement du
roc"er sur 2,! m de "autC
La mise en eau de la di!ue suit une olution linaire dans le temps correspondant
A une monte de 1m du nieau de la retenue par mois7 soit eniron une itesse
de
2,6,10
6
s/ m
%usqu'A atteindre le nieau maximum @ix A 14m Roir illustration
dSC
Le mailla!e est bidimensionnel et compos de '01 lments quadratiques A
int!ration slectie7 ?@AD(( 4) et 2(44 nbudsC
La tolrance sur le rsidu li A l'int!ration locale du mod4le de comportement de
(u%eux est @ixe A
10
&
tandis que celle lie au rsidu de l'quilibre !lobal est
@ixe A
10
4
Raleur utilise aec CodeTAsterSC L'tude ralise sous G-F2yn est
suppose coner!e pour un rsidu !lobal in@rieur A
10
3
sur les dplacements
et
10
1
sur les e@@ortsC
Illustration ".'2 : 3aillage de la digue simplifie de pente 2/1
Illustration ".'1 : :istori)ue de construction
et mise en eau de la digue
; Annexes #H$
PARAMETRES DIGUE FONDATION ROCHER
+ousse des terres &78 &78
Masse olumique ^I!<m
=
_ #F9& #F9& #F9&
ELASTICITE
K ( "#+) 9$F7# 9$F7# H=F7:
G( "#+) #=87# #=87# =#:79
n
e
&7H &7H
#
ref
( "#+) /$ /$
ETAT CRITILUE H PLASTICITE PARFAITE
H& H&
=& =&
#79 #79
b
&7# &7#
#
7!
( "#+) /$ /=
LOI D8ECOULEMENT H ECROUISSAGE ISOTROPE
H& H&
+
m)n
&7&&8 &7&&8
+
c-c
&7&&&$ &7&&&$
c
m)n
&7$9 &7$9
c
c-c
&7&:9 &7&:9
,
m
$ $
SEUIL DES DOMAINES
r
, m)n
el+
&7&&9 &7&&9
r
,c-c
el+
&7&&9 &7&&9
r
h-s
&7&9 &7&9
r
m)b
&7; &7;
r
is)
el+
&7&&&$ &7&&&$
o
$ $
PROPRIETES HQDRAULILUES
+orosit &7= &7= &7=
+ermabilit ^m<s_
10
!
10
!
10
!
Compressibilit ^M+a_
10
+6
10
+6
10
+6
1iscosit
10
3
10
3
10
3
Coe@@icient de )iot $ $ $
T&%#e& D-: $ P&r&m+tres 7(*r&#i3es et mc&ni3es 0!r #& *i5e sim0#i2ie
7!m!5+ne
#H# ;C: Modlisation d'une di!ue en terre aec le mod4le de (u%eux
Sur les illustrations ;C=H A ;CH&7 on compare les rsultats obtenus aec CodeTAster
A ceux obtenus aec G-F2yn7 pour le construction par couc"es et la mise en eauC
On @ournit !alement sur l'illustration ;C== les temps C+U mac"ines reles A
c"aque tape de la construction pour un total de 3(60s 7 soit un peu plus d'$
"eureC La mise en eau de la di!ue a quant A elle t ralise en 1!21!s 7 soit
="=&minC Les temps C+U reles aec G-F2yn sont in@rieurs7 puisque le calcul
pour la p"ase de construction a pris 3600s RA peu pr4s quialentS et la p"ase de
mise en eau !00s C Les per@ormances en temps C+U a@@ic"es pour le calcul de
la di!ue sous CodeTAster peuent nanmoins arier en @onction des di@@icults
rencontres dans le calculC
Les illustrations ;C=H A ;CH& prsentent l'olution au cours de la construction par
couc"es ainsi qu'A la @in de la mise en eau des di@@rentes quantits d'intrBt suiant
une coupe erticale passant par l'axe de symtrie ertical de la di!ueC
Les tassements et la pression "ydraulique reles sont en tr4s bon accord
entre les deux codesC
La comparaison des aleurs des ariables d'crouissa!e caractrisant le
de!r de mobilisation de l'an!le de @rottement au sein de la di!ue sont
relatiement bonnes entre les deux codes en terme d'olutionC 2es
di@@rences quantitaties apparaissent nanmoins au cours de la
construction7 maintenue durant la mise en eauC
Les dplacements latraux reles sont !alement tr4s proc"esC
Cette tude de cas simpli@i a permis de tester la robustesse et de alider la
mt"odolo!ie mise en place pour raliser la construction par couc"es et la mise en
eau de la di!ueC
Cette mt"odolo!ie d'tude pour la ralisation d'un calcul de construction et mise en
eau de di!ue a !alement t proue sur le barra!e 3on d'-l ,n@iernillo qui a @ait
l'ob%et d'un benc"marI ,COL2 en $;;#C Les rsultats dtaills sont prsents dans
le document de 5"am R#&&;SC
Illustration ".'' : #emps +LG mac-ine ncessaire a5ec +ode;/ster en fonction de la -auteur
de la digue construite
; Annexes #H=
Illustration ".'* : +omparaison de l'5olution du tassement 5ertical sui5ant une coupe
5erticale lors de la construction entre +ode;/ster (ligne continue) et <CDD>n (pointills)
Illustration ".'1 : +omparaison de l'5olution de c
--
'
sui5ant une coupe 5erticale entre
+ode;/ster (ligne continue) et <CDD>n (pointills) pendant la p-ase de construction et en fin
de mise en eau de la digue
#HH ;C: Modlisation d'une di!ue en terre aec le mod4le de (u%eux
Illustration ".'B : +omparaison de l'5olution de c
,,
'
selon une coupe 5erticale sui5ant une
coupe 5erticale entre +ode;/ster (ligne continue) et <CDD>n (pointills) lors de la construction
et en fin de mise en eau de la digue
Illustration ".'& : +omparaison de l'5olution de la pression ->drauli)ue ' selon une coupe
5erticale entre +ode;/ster (ligne continue) et <CDD>n (pointills) pendant la construction et en
fin de mise en eau de la digue
; Annexes #H9
Illustration ".'0 : +omparaison de l'5olution de c
v
p
selon une coupe 5erticale entre
+ode;/ster (ligne continue) et <CDD>n (pointills) pendant la construction et en fin de mise
en eau de la digue
Illustration ".'" : +omparaison de l'5olution de r
,,
m
selon une coupe 5erticale entre
+ode;/ster (ligne continue) et <CDD>n (pointills) pendant la construction et en fin de mise
en eau de la digue
#HF ;C: Modlisation d'une di!ue en terre aec le mod4le de (u%eux
Illustration ".*! : +omparaison de l'5olution du dplacement -oriIontal '
,
selon une
coupe 5erticale entre +ode;/ster (ligne continue) et <CDD>n (pointills) lors de la
construction et en fin de mise en eau de la digue
; Annexes #H:
D-E An&#(se *es s(st+mes *(n&mi3es
D-E-, A00r!c7e c!ntine
L'tude de la stabilit de l'quilibre pour un syst4me mcanique A n de!rs de
libert se rduit7 dans le cadre de la t"orie linarise7 A l'examen du comportement
asymptotique pour t - de la solution ectorielle d'une quation di@@rentielle
matricielle du second ordreC L'analyse asymptotique conduit A @ormuler plusieurs
propositions qui noncent des conditions de stabilit ou d'instabilitC
Soit un syst4me mcanique ayant n de!rs de libert dont la con@i!uration est
dcrite par la coordonne ectorielle U (t )+
n
C L'quation du mouement du
syst4me linaris au oisina!e de la con@i!uration U (t
0
)=0 7 suppose A
l'quilibre7 crite sous @orme matricielle est :
"
U (t )+7
U ( t )+( K+D)U(t )=0
R;CH;S
aec :
" : la matrice symtrique de masse d@inie positie7
7 : la matrice symtrique d'amortissement d@inie positie7
K : la matrice symtrique de l'oprateur tan!ent de ri!idit Rcorrespond aux
@orces conseratiesS7
D : la matrice anti/symtrique de l'oprateur tan!ent de ri!idit C
Toutes ces matrices ont une dimension nn C
La matrice D tant antisymtrique7 elle a les proprits suiantes :
D
t
=D = det D=(1)
n
det D C La condition det ( D)0 imposera alors que
n soit un nombre pairC L'quation caractristique associe A l'quation de
mouement ;CH;7 aec \ un nombre complexe7 est donne par la relation
suiante :
det (\
2
"+\7+K+D)=0
R;C9&S
Les proprits de symtrie et d'antisymtrie des matrices utilises dans l'quation
;CH; permettent !alement d'crire l'expression suiante :
det (\
2
"+\7+KD)=0
R;C9$S
La stabilit du syst4me est assure si toutes les racines \ ont une partie relle
n!atieC A l'inerse7 une instabilit apparaQt d4s qu'une racine a une partie relle
positieC
2e plus7 on d@init de mani4re usuelle le produit scalaire de deux ecteurs ' et
v : (' , v)=
i=1
n
'
i
v
i
7 aec
v
i
la aleur con%u!ue de v
i
C Les proprits des
#H8 ;C8 Analyse des syst4mes dynamiques
matrices K et D permettent alors d'tablir les relations qui suient :
\' , \v , (v , ') 9 (
' ,
v)
\' , \v , ( K' , v) 9 ( ' , Kv)
\' , \v , ( D' , v) 9 ( ' , Dv)
o>0/ \' , ( K' , ') o(' , ')
\' , +( D' , ') 9 0
R;C9#S
'oseauR$;8HS7 se basant sur une analyse des quations caractristiques7 a
dmontr les conditions su@@isantes suiantes RTableau ;CFS :
C d@inie positie Jtude de la Stabilit
D=0 7 K d@inie positie U (t
0
) est stable
D=0 7 K d@inie n!atie U (t
0
)
est instable si
(\
k
)
k=1,.,2n
de
;C9& sont telles que
+(\
k
)
k1, n
0
et
+(\
k
)
kn+1,2n
>0
D=0 7 une aleur propre de K
est n!atie
U (t
0
) est instable
D0 7 K d@inie n!atie U (t
0
) est instable
det ( K+D)0 U (t
0
) est instable
D0 7
D7
#1
"7D+K
d@ini
e positie
U (t
0
) est stable
Une aleur propre de
D7
#1
"7D+K
n!atie
U (t
0
) est instable
T&%#e& D-< $ t*e *e #& st&%i#it *es s!#ti!ns
U (t
0
)
en 2!ncti!n *es 0r!"
0rits *es m&trices * s(st+me t*i @R!se&? ,DE9B
'emarque $ :
La dia!onalisation de l'oprateur tan!ent permet d'exprimer les quations
di@@rentielles sous @orme dcouples7 tablies pour les ariables !nralises
d@inies A partir des ecteurs propresC La aleur du module des aleurs propres
d@init le caract4re stable de la solutionC -n e@@et7 la stabilit est assure si et
seulement si les modules des aleurs propres sont in@rieures A l'unitC
E.em0#e $
2ans le cas restreint d'un syst4me dynamique A un de!r de libert7 pour deux
ariables7 les racines de l'quation caractristique sont con%u!ues :
\=je
!i
C
Les solutions peuent Btre portes dans le plan complexeC Si le module j des
racines est in@rieur A $7 les tra%ectoires en spirale se diri!ent ers l'intrieur et la
stabilit est assureC 2ans le cas contraire7 j>1 7 les tra%ectoires en spirale ont
ers l'extrieur et l'quilibre est instableC
; Annexes #H;
-n !nral7 pour des aleurs propres con%u!ues complexes7 les cas suiants de
perte de stabilit sont A considrer :
Si toutes les aleurs propres du syst4me sont relles posities7 l'quilibre est stableC
Le cas critique de perte de stabilit apparaQtra d4s que la plus petite aleur propre
tend ers 3roC La branc"e @ondamentale de la rponse deient instable7 pour un
c"ar!ement critiqueC On parle alors d'instabilits dier!entesC
S'il existe des aleurs propres complexes du syst4me arran!es par paire de
nombres complexes con%u!us7 la branc"e @ondamentale de solutions deient
instable et on parle d'instabilits de @lottementC La aleur critique de c"ar!ement
apparaQtra d4s que l'ensemble des aleurs propres con%u!ues disparaQtront :
\=je
!i
7 aec -0 C
'emarque # :
-n considrant un syst4me lastique linaire en dbut de c"ar!ement7 caractris
par une matrice de ri!idit d@inie positie7 K
0
C Les quations de mouement
autour de cette position d'quilibre prennent la @orme suiante :
"
U (t )+7
U ( t )+K
0
U( t )=0
R;C9=S
La matrice d'inertie " tant d@inie positie7 elle est donc inersibleC -n e@@ectuant
un c"an!ement de ariable du type
W="
1/2
U
7 l'quation ;C9= peut Btre rcrite
comme suit :
W(t )+"
1/2
7"
1/2
W (t )+"
1/ 2
K
0
"
1/ 2
W( t )=0
R;C9HS
L'introduction d'une ariable intermdiaire = (t )=
W (t ) permet d'tablir le syst4me
d'quations dynamiques du premier ordre :
(
W(t )
= (t )
)
+
(
0 Bd
"
1/ 2
K
0
"
1/ 2
"
1/2
7"
1/2
)
(
W (t )
= ( t )
)
=
(
0
0
)
R;C99S
Comme indiqu prcdemment7 le comportement asymptotique de la rponse est
!ouerne par la matrice de ri!idit lastique K
0
7 puisque la solution prend la
@orme suiante :
(
W(t )
= (t )
)
=e
9t
(
W (0)
= (0)
)
a4ec 9=
(
0 Bd
"
1/ 2
K
0
"
1/ 2
"
1/2
7"
1/2
)
R;C9FS
On peut A prsent s'intresser au comportement de l'oprateur 9 :
det (9)=(1)
n
det ( "
1/2
K
0
"
1/ 2
)det (Bd)=det ( K
0
)/ det ( ")
R;C9:S
La rec"erc"e des aleurs propres et ecteurs propres du probl4me peut Btre
#9& ;C8 Analyse des syst4mes dynamiques
!alement e@@ectue :
Cr/u4er (1
W
, 1
=
) et \ tel 8ue:
Bd1
=
\Bd1
W
9 0
"
1/2
K
0
"
1/2
1
W
+"
1/2
7"
1/ 2
1
=
\Bd1
=
9 0
=
1
=
+\1
W
9 0
( "
1/ 2
K
0
"
1/ 2
\"
1/2
7"
1/2
+\
2
Bd)1
=
9 0
R;C98S
aec \=j+i o C Ce probl4me correspond A un probl4me aux aleurs propres
quadratiquesC
Si dans le probl4me initial Rquation ;C9=S7 des @orces extrieures sont a%outes7
l'expression de la solution au probl4me deient alors :
(
W(t )
= (t )
)
=e
9t
(
W (0)
= (0)
)
+
|
0
t
e
9( tt)
(
0
"
1
F (t)
)
d t
R;C9;S
'emarque = :
,l s'a!it ici d'introduire le concept de dualisation des conditions aux limites
cinmatiques du probl4me dynamique considr sous contraintes a@@inesC Les
relations linaires imposes sont du type BU=0 C Apr4s dualisation par double
multiplicateurs de La!ran!e \ 7 le probl4me obtenu A rsoudre s'crit comme suit
Roir +ode;/ster R'=C&=C&$ et '9C&$C&$SS :
K=
(
K B
t
B
t
B Bd /
B Bd Bd
)
et
"=
(
" 0 0
0 0 0
0 0 0
)
a4ec
U=
(
U
\
\
)
R;CF&S
Ce c"oix !arantit que le probl4me aux aleurs propres sous cette @orme est
identique au probl4me d'ori!ine7 dans le cas lastique linaireC
D-E-/ A00r!c7e &;ec *iscrtis&ti!n s0&ti!"tem0!re##e
Le para!rap"e prsent ci/dessous s'intresse au comportement de la mt"ode de
*eUton dans le cadre d'une int!ration temporelle de type *eUmarI7 A l'introduction
d'une perturbation de la solutionC On se place dans le cas oZ les oprateurs d'inertie
" et d'amortissement 7 sont supposs constantsC
&.'.2.1 ,rliminaires
L'analyse des instabilits des solutions7 dans le cadre d'une discrtisation spatiale
ia la mt"ode des lments @inis7 peut Btre tudie en s'intressant aux proprits
du %acobien du syst4me d'quations non linaires du probl4meC Le probl4me A
rsoudre dans le cas quasi/statique s'crit comme suit :
; Annexes #9$
%(U (t ))=F
e,t
(t )
R;CF$S
aec %(U(t ))= 9
t
c
( U(t ) , t)
7 9 tant l'oprateur discret reprsentant l'int!rale
des puissances de d@ormations irtuelles sur le domaine complet et c le c"amp
de contraintes calcul en c"aque point matriel du domaineC 9 est suppos rester
linaire dans le cadre des petites d@ormations Ron ne prend pas en compte les non
linarits !omtriquesSC
La matrice tan!ente carre %' (U (t ))=
d %(U (t))
d U(t )
doit Btre quant A elle d@inie
positie pour s'assurer une coner!ence de l'al!orit"me itrati@ de *eUton 'ap"son
ers la solution du probl4me ;C9FC 2ans le cadre d'une analyse dynamique7 apr4s
discrtisation spatiale7 considrant un amortissement du type isqueux7 le probl4me
A rsoudre A l'instant t
i
=t
i1
+At prend la @orme suiante :
"
U (t
i
)+7
U(t
i
)+%(U ,
U , t
i
)=F
e,t
(t
i
)
R;CF#S
-n c"oisissant par exemple d'utiliser un sc"ma de *eUmarI pour rsoudre le
probl4me prcdent7 il est ncessaire d'introduire deux scalaires et pour
obtenir une expression explicite des c"amps d'incrments de itesse et
d'acclration sur le domaine :
A
U =
At
AU
U (t )+
( 2)At
2
U ( t )
A
U =
1
At
2
AU
1
At
U (t )
1
2
U( t )
R;CF=S
Le probl4me !nral A rsoudre peut alors s'crire sous la @orme suiante :
1
At
2
"U (t
i
)+
At
7U (t
i
)+%(U(t
i
) ,
U (t
i
))=L(t
i
)
R;CFHS
aec " la matrice de masse symtrique7 7 la matrice d'amortissement
isqueux et
L(t
i
)
le second membre7 constitu des @orces extrieures et des
termes issus du pas de temps prcdent :
L(t
i
) 9 F
e,t
( t
i
)+
1
At
2
"
(
U
i1
+At
U
i1
+At
2
(
12
2
U
i1
))
+
1
At
7
(
U
i1
+At ()
U
i1
+At
2
(
12
2
U
i1
)
)
R;CF9S
Finalement la matrice tan!ente contrMlant le probl4me prsent ci/dessus s'exprime
comme suit :
K (U (t ))=
1
At
2
"+
At
7+
d %(U (t ))
d U
R;CFFS
#9# ;C8 Analyse des syst4mes dynamiques
La matrice tan!ente du syst4me
K (U (t )) est constitue de l'oprateur tan!ent
matriel7 issu de la relation constitutie du matriau7 ainsi que par les matrices de
masse et d'amortissementC Les contributions des matrices de masse et
d'amortissement sont contrMles par les incrments de pas de tempsC -n @onction
de la discrtisation temporelle impose7 les proprits de l'oprateur tan!ent seront
alors modi@iesC
La mt"ode de *eUmarI permet d'obtenir les incrments de itesse et
d'acclration A partir de l'incrment de dplacementC
L'quation non linaire ;CF# est rsolue par une mt"ode itratie de *eUton7 oZ la
premi4re itration est obtenue A partir d'une prdiction d'-uler explicite du premier
ordre7 U
0
(t
i
)=U (t
i1
)+AU
i
0
=U
i
0
:
K (U (t
i1
))AU
i
0
=L(t
i
)L(t
i1
)
R;CF:S
Les itrations de correction sont ensuite obtenues ia les relations suiantes :
U
i
n+1
9 U
i
n
+6U
i
n+1
9 U
i1
+AU
i
n
+6U
i
n+1
U
i
n+1
9
U
i
n
+
At
6U
i
n+1
9
U
i
0
+
At
(U
i
n+1
U
i
0
)
U
i
n+1
9
U
i
n
+
1
At
2
6U
i
n+1
9
U
i
0
+
1
At
2
(U
i
n+1
U
i
0
)
R;CF8S
ou
K (U (t
i 1
))6U
i
n+1
9 L(t
i
)%(U
i
n
)7
U
i
n
"
U
i
n
R;CF;S
Un crit4re de coner!ence est tabli en rapport aec la norme du ecteur rsidu :
%(U
i
n
)+7
U
i
n
+"
U
i
n
L(t
i
)
L(t
i
)
j
R;C:&S
oZ j est une tolrance A respecter pour obtenir coner!ence et
la norme
usuelle des ecteursC
+our des conditions aux limites dualises Rrelation linaire impose A un de!r de
libert7 condition unilatrale de Si!noriniS aec introduction des multiplicateurs de
La!ran!e7 j
i
n
7 le crit4re ;C:& est modi@i de la @a0on suiante :
%(U
i
n
)+7
U
i
n
+"
U
i
n
+ B
t
j
i
n
L(t
i
)
L(t
i
)
j
t)l R;C:$S
aec B l'oprateur linaire associ aux conditions aux limites imposesC
; Annexes #9=
Le processus de rsolution des quations du syst4me non linaire dynamique a t
prsent A l'quation ;CF;C Ce sont les proprits des oprateurs
K et
d %(U
i
n
)
d U
qui contrMleront la stabilit de la solution obtenue autour de sa position d'quilibreC
&.'.2.2 ,ertur3ations de la suite des itrs de la mt-ode de *e+ton
Considrons A prsent une perturbation 8
i
n
qui apparaQt durant le processus
d'itration de l'al!orit"me de *eUton A l'instant t
i
C -n utilisant l'approximation
quadratique des sries de Taylor et la drie de l'quation ;CF; par rapport A U
i
n
7 applique au candidat U
i
n
7 on obtient la relation suiante Roir Y;C; S :
K
i
n
(U
i
n
)
8
i
n+1
+7 8
i
n
+" 8
i
n
1
2
8
i
n
2
%
U
2
( U
i
n
, U
i
n
,t
i
)
8
i
n
+8
i
n
2
%
U
2
( U
i
n
, U
i
n
, t
i
)
8
i
n+1
=0
R;C:#S
L'"ypot"4se initiale de cette analyse repose sur le @ait que la p"ase de prdiction
initiale a donn une solution unique U
i
0
7 qui est quialente A considrer un
oprateur
K
i1
r!ulierC L'unicit de la solution U
i
0
impose 8
i
0
=0 C L'quation
;C:# nous permet d'extraire la condition suiante portant sur 8
i
1
:
K
i
0
8
i
1
=0 au
troisi4me ordre en 8
i
1
7 soit 8
i
1
Ker (
K
i
0
)
C
Si l'oprateur tan!ent est r!ulier7 alors 8
i
1
=0 et ceci reste rai tant qu'il !arde sa
r!ularitC ,l n'y a pas de solutions perturbes possiblesC Si l'oprateur
K
i
0
est
sin!ulier7 alors il est possible de construire une direction de solution 8
i
1
0 7 aec
8
i
1
=
At
8
i
1
et
8
i
1
=
1
At
2
8
i
1
C
L'itr suiant 8
i
2
ri@ie !alement selon l'quation ;C:# :
(
K
i
1
U
i
1 +8
i
1
2
%
U
2
(U
i
1
,
U
i
1,
t
i
)
)
8
i
2
=
(
1
2
8
i
1
2
%
U
2
( U
i
1
,
U
i
1,
t
i
)
1
At
2
"+
At
7
)
8
i
1
R;C:=S
Si
K
i
1
U
i
1
est sin!ulier7 alors pour 8
i
2
Ker (
K
i
1
) 7 on a au second ordre
pr4s en 8
i
2
:
(
8
i
1
2
%
U
2
(U
i
1
,
U
i
1,
t
i
)
)
8
i
2
(
1
2
8
i
1
2
%
U
2
(U
i
1
,
U
i
1,
t
i
)
1
At
2
"+
At
7
)
8
i
1
=0
C
Si
2
%
U
2
(U
i
1
, U
i
1,
t
i
)
est r!ulier pour les directions 8
i
1
et 8
i
2
7 alors
8
i
2
est une perturbation non nulle admissible7 au troisi4me ordre pr4sC
#9H ;C8 Analyse des syst4mes dynamiques
Si
2
%
U
2
(U
i
1
, U
i
1,
t
i
)
est sin!ulier7 alors 8
i
2
n'est pas quanti@iable pour les
directions contenues dans le Ker (
K
i
1
)
C La suite des itrs dier!eC
Si
K
i
1
U
i
1
est r!ulier7 alors 8
i
2
est une perturbation non nulle admissible7
dpendant de 8
i
1
C On remarque nanmoins que la suite U
i
n
+8
i
n
ne
coner!e pas ncessairement ers
lim
n-
U
i
n
C
-n reprenant les rsultats tablis ci/dessus7 on rel4e plusieurs points importants :
Tant que l'oprateur tan!ent du syst4me
K
i
n
U
i
n
reste r!ulier7 aucune
bi@urcation ne peut se delopperC
L'apparition d'une direction sin!uli4re dans l'oprateur tan!ent
K
i
n
U
i
n
A un
itr quelconque U
i
n
7 rend possible une perturbation non nulle de la suite
de solutions7 d'amplitude quelconque7 contrMle par les dries tierces des
@orces intrieuresC Les sin!ularits proiennent tou%ours de l'oprateur li aux
mod4les de comportement locaux %(U(t )) C -lles peuent Btre modi@ies
par les oprateurs de la dynamique " et 7 7 ainsi que le pas de temps
At C
Les itrs suiants obtenus apr4s l'apparition d'une sin!ularit maintiennent
cette perturbation7 mBme si l'oprateur tan!ent retroue sa r!ularitC 2ans
le cas oZ
2
%
U
2
(U
i
n
, U
i
n
,t
i
)
est !alement sin!ulier7 la suite de solutions peut
dier!er dans cette directionC
On souli!ne cependant que cette analyse suppose des matrices exactement
sin!uli4res7 @ait qui interient rarement dans le cadre des simulations numriquesC
L'oprateur tan!ent peut en reanc"e Btre mal conditionn et reprsent par une
matrice sin!uli4re perturbeC
On sait7 d'apr4s les traaux de t"4se de ?eannerod R#&&&S7 que les aleurs propres
d'une matrice perturbe K+j
K arient continument pour une perturbation j
tendant ers 3ro R j
K est constitue par exemple des erreurs d'arrondisSC Tant
que K est r!uli4re7 les aleurs propres de la matrice perturbe ont pour termes
dominants les aleurs propres de la matrice K C Si K poss4de une aleur
propre nulle7 alors les aleurs propres de la matrice perturbe ne arient pas plus
que de l'ordre de j C -n reanc"e7 pour plusieurs aleurs propres nulles7 les
aleurs propres de la matrice perturbe peuent Btre d'ordres suprieurs A j C
2ans le cadre de sa t"4se Fernandes R#&&;aS a montr que les sin!ularits des
oprateurs tan!ents permettent d'induire des modes multiples de bi@urcationC On
oit d'apr4s les rsultats de ?eannerod R#&&&S qu'il est ncessaire d'obtenir un
rsidu de l'al!orit"me de *eUton le plus @aible possible au risque de !nrer des
modes de bi@urcations dier!ents7 non lis au probl4me mcanique posC
; Annexes #99
D-D Pertr%&ti!n *e #& site *es itrs *e #& mt7!*e *e Ne)"
t!n
Apr4s aoir obtenu une solution de prdiction U
i
0
suppose unique7 tablie A
partir de l'oprateur
K
i1
r!ulier7 enisa!eons l'existence d'une perturbation
8
i
n
autour de l'itr U
i
n
qui constitue une autre suite de solutions admissibles
au syst4me d'quations itraties Rquation ;CF;SC La r!ularit suppose de
K
i1
nous assure que 8
i
0
=0 C L'expression des @orces intrieures exprimes
sous la @orme du srie de Taylor s'crient :
F
i
n
( U
i
n
+8
i
n
,
U
i
n
+ 8
i
n
,
U
i
n
+ 8
i
n
)=%(U
i
n
)+7(
U
i
n
+ 8
i
n
)+" (
U
i
n
+ 8
i
n
)+,,,
,,,
%
U
(U
i
n
, U
i
n
,t
i
)
8
i
n
+
1
2
8
i
n
2
%
U
2
(U
i
n
,
U
i
n
,t
i
)
8
i
n
+)( 8
i
n
)
3 R;C:HS
L'quation ;CF8 nous indique que
8
i
n
et
8
i
n
sont du mBme ordre que 8
i
n
C La
perturbation ri@ie donc par "ypot"4se A l'itration de correction courante :
K
i
n
(U
i
n
+8
i
n
)
(6U
i
n+1
+68
i
n+1
)=
L( t
i
) F
i
n
(U
i
n
+8
i
n
,
U
i
n
+ 8
i
n
,
U
i
n
+ 8
i
n
) R;C:9S
Ce qui deient au second ordre pr4s en 8
i
n
:
K
i
n
(U
i
n
+8
i
n
)
(6U
i
n+1
+68
i
n+1
)=
K
i
n
( U
i
n
)
+8
i
n
2
%
U
2
(U
i
n
, U
i
n
,t
i
)
(6U
i
n+1
+68
i
n+1
)=,,,
,,,
L
(
t
i
)
%(U
i
n
)7 (
U
i
n
+ 8
i
n
)" (
U
i
n
+ 8
i
n
),,,
,,,
%
U
( U
i
n
,
U
i
n
, t
i
)
8
i
n
1
2
8
i
n
2
%
U
2
( U
i
n
, U
i
n
, t
i)
8
i
n
R;C:FS
-n in%ectant l'quation ;CF;7 l'expression ;C:F s'crit :
K
i
n
(U
i
n
)
68
i
n+1
+7 8
i
n
+"
8
i
n
+
%
U
( U
i
n
,
U
i
n
, t
i
)
8
i
n
,,,
,,,+8
i
n
2
%
U
2
( U
i
n
,
U
i
n
, t
i )
(
6U
i
n+1
+6 8
i
n+1
)
=
1
2
8
i
n
2
%
U
2
( U
i
n
,
U
i
n
, t
i )
8
i
n
R;C::S
Soit aussi :
K
i
n
(U
i
n
)
8
i
n+1
+7 8
i
n
+" 8
i
n
(
1
At
2
"+
At
)
8
i
n
+8
i
n
2
%
U
2
( U
i
n
, U
i
n
, t
i
)
6U
i
n+1
,,,
,,,=8
i
n
2
%
U
2
(U
i
n
,
U
i
n
,t
i
)
68
i
n+1
1
2
8
i
n
2
%
U
2
( U
i
n
,
U
i
n
, t
i
)
8
i
n
R;C:8S
2e plus7 en driant l'expression ;CF; par rapport A U
i
n
7 on obtient :
#9F ;C; +erturbation de la suite des itrs de la mt"ode de *eUton
4
2
%
U
2
(U
i
n
, U
i
n
,t
i
)
6U
i
n+1
K
i
n
U
i
n 4 +
%
U
(U
i
n
, U
i
n
,t
i )
4=0 , \4 R;C:;S
-n c"oisissant le ecteur 4=8
i
n
7 on obtient @inalement :
8
i
n
2
%
U
2
( U
i
n
, U
i
n
, t
i
)
6U
i
n+1
K
i
n
U
i
n 8
i
n
+
%
U
(U
i
n
, U
i
n
,t
i )
8
i
n
=,,,
8
i
n
2
%
U
2
( U
i
n
,
U
i
n
, t
i
)
6U
i
n+1
(
1
At
2
"+
At
7
)
8
i
n
=0
R;C8&S
L'quation ;C:8 prend alors la @orme suiante au second ordre pr4s en 8
i
n+1
:
K
i
n
(U
i
n
)
8
i
n+1
+7 8
i
n
+" 8
i
n
=
1
2
8
i
n
2
%
U
2
( U
i
n
, U
i
n
,t
i
)
8
i
n
8
i
n
2
%
U
2
( U
i
n
, U
i
n
, t
i
)
8
i
n+1
R;C8$S
; Annexes #9:
D-,A A00#ic&ti!n * m!*+#e *e sec!n* 5r&*ient ;!#"
mi3e = #& *(n&mi3e
3&ti!ns *e #& *(n&mi3e #in&ire *8n mi#ie c!ntin &;ec sec!n*
5r&*ient *e *i#&t&ti!n
D-,A-, 3&ti!ns en 0etites tr&ns2!rm&ti!ns
Le traail irtuel des @orces d'inertie Rla masse olumique du solide est note j S
n'est pas a@@ect par la modlisation aec second !radientC Le principe des traaux
irtuels7 les composantes de l'acclration en rep4re !alilen tant notes
i
='
i ,tt
7 s'crit alors :
Trouer c et 1 tels que :
W
ine
W
def
+W
ext
=0 =
|
D
j
i
'
i
*
v+
|
D
(c
ij
c
ij
( '
*
)+1
j
j
j
('
*
)) v=
|
D
f
i
'
i
*
v+
|
D
f
F
i
'
i
*
s \'
*
V
0
R;C8#S
,l conduit donc A la @orme @orte de l'quilibre RlocalS :
c
ij , j
+1
j , kj
6
ki
+ f
i
j
i
=0 dans D
R;C8=S
et les mBmes conditions aux limites naturelles qu'en statique du milieu continu aec
second !radient de dilatation7 auxquelles il @aut a%outer les conditions initiales en
' et
'
, t
C
D-,A-/ M!*es *e ;i%r&ti!n en #&sticit #in&ire
Cette tude est restreinte au cadre de l'lasticit linaire isotrope "omo!4ne
Roprateur d'lasticit not A 7 coe@@icients E et + SC La loi de comportement
locale est lastique linaire isotrope pour le second !radient de dilatation Roprateur
not B 7 scalaire
b
s
positi@SC On se concentre A prsent sur l'tude des ibrations
propres du solide7 en admettant des solutions A ariables spares R)amber!er
R$;;:SS '( , ,t )=U ( ,) f (t ) 7 pour c"aque instant sur la dure d'analyse
t | 0, t
f
| du transitoireC
|
D
jU
i
'
i
*
f (t ) v+
|
D
c
kl
(U) A
ijkl
c
ij
( '
*
) f (t ) v+,,,
,,,
|
D
j
j
(U) b
s
j
j
( '
*
) f (t ) v=0 \'
*
V
0
R;C8HS
V
0
est l'espace ectoriel des c"amps admissibles7 ri@iant les conditions aux
limitesC
La @onction
f (t )/ f (t )=o
2
est ncessairement indpendante du tempsC On en
#98 ;C$& Application du mod4le de second !radient olumique A la dynamique
dduit que la @ormulation ariationnelle associe au probl4me aux modes U ( ,) et
aleurs propres
o
2
>0
s'crit :
o
2
|
D
jU
i
'
i
*
v+
|
D
c
kl
(U ) A
ijkl
c
ij
('
*
) v+
|
D
j
j
(U) b
s
j
j
('
*
) v=0 \'
*
V
0
R;C89S
On @ait ainsi apparaQtre le coe@@icient de 'aylei!" :
o
2
(U)=
|
D
c
kl
(U) A
ijkl
c
ij
(U) v+
|
D
j
j
(U) b
s
j
j
(U) v
|
D
jU
i
U
i
v
\'
*
V
0
R;C8FS
La stationnarit sur l'ensemble des modes U ( ,) admissibles quiaut A la
@ormulation ariationnelle du probl4me aux modes et aleurs propres7 c"acun
associ A la @onction du temps
f (t )=+( e
i ot +
) 7 aec la pulsation
o+
"
7 pour
donner la solution transitoireC L'ner!ie associe au second !radient de dilatation
contribue ainsi A la raideur du syst4meC
Les conditions aux limites naturelles du probl4me aux limites du mode propre
s'crient :
en terme de @orces normales au bord Ren prenant des dplacements irtuels
normauxS :
c
nn
1
j , j
=0 = A
nnkl
U
k , l
b
s
U
k ,kjj
=0 s'r D
f
R;C8:S
en terme de @orces tan!entielles au bord Ren prenant des dplacements irtuels
tan!entielsS :
c
t
o
n
1
n, t
o
=0 = A
t
o
nkl
U
k , l
b
s
U
k , kt
o
n
=0 s'r D
f
R;C88S
et selon la direction
n
'
n
$
:
1
j
n
j
=1
n
=0 = U
k ,kn
=0 s'r D R;C8;S
D-,A-4 A00#ic&ti!n &. m!;e"
ments 0r!0res *8ne c!c7e
*e s!# #&sti3e
&.1;.3.1 Modes de 1i3ration en
lasticit linaire
On consid4re une couc"e de sol linaire
lastique isotrope7 de "auteur (7 reposant sur
un substratum roc"eux suppos ri!ide7 oir
@i!ure ;CH$C Les proprits matriau sont
Illustration ".*1 : +ouc-e de sol de
-auteur : sur un substratum roc-eu9
; Annexes #9;
donnes par un module d'6oun! E et un module de cisaillement
G=E/ (2(1++)) C Les sollicitations traites seront successiement des ibrations
lon!itudinales '
.
( . ,t ) Rri@iant c
,,
=c
--
=c
,-
=c
-.
=c
,.
=0 S puis des ibrations
de cisaillement '
,
( . , t ) Rri@iant c
,,
=c
--
=c
..
=c
,-
=c
-.
=0 SC Les quations du
mouement rsultent de l'quilibre lastique7 respectiement :
c
.. , .
j
.
=
E(1+)
(1++)(12+)
'
. , ..
j '
.
= 0
c
,. , .
j
,
= G'
, , ..
j
'
,
= 0
R;C;&S
+our les ibrations lon!itudinales7 les solutions ondulatoires rec"erc"es sont
supposes prendre la @orme
'
.
( . ,t )=+
(
j
U
. j
l
( . ) e
i o
j
t
)
7 aec des modes de
type U
.
=ce
ik.
7 c+ tant une constante et k tant le nombre d'onde [ de
mBme pour les ibrations en cisaillementC
On note par 2
l
=.E(1+)/ (j(1++)(12+)) et 2
s
=.G/ j les itesses des
ondes lastiques lon!itudinales et de cisaillement dans la couc"e RGibert7$;88SC La
relation de N dispersion O dduite des quations du mouement s'crit simplement
respectiement : k
l
=!o/ 2
l
et k
s
=!o/2
s
C Les solutions des ondes
lon!itudinales sont donc propa!aties et non/dispersies7 de la @orme :
'
.
( . ,t )=+
(
j
U
. j
l
( . ) e
i o
j
t
)
=+
(
j
U
j
( .) e
ik
j
( .!2
l
t )
)
R;C;$S
C
-n criant le respect des conditions aux limites de bloca!e en .=H :
U (H)=0 et de sur@ace libre en .=0 : U
, .
( 0)=0 7 on obtient la suite
dnombrable de modes propres unidimensionnels lon!itudinaux Rnombre d'onde
k
j
l
=!2n f
j
l
/2
l
S et de cisaillement Rnombre d'onde k
j
s
=!2n f
j
s
/2
s
S
suiante :
U
. j
l
( .)=c/s
(
n. (2.1)
20
)
et U
, j
s
( .)=c/s
(
n. (2.1)
20
)
R;C;#S
associs aux @rquences suiantes respecties :
f
j
l
=(2.1)
2
l
40
et f
j
s
=( 2.1)
2
s
40
p/ur j N
"
R;C;=S
&.1;.3.2 Modes de 1i3ration en lasticit linaire a1ec second 0ra-
dient de dilatation
Apr4s aoir tabli les solutions pour une cinmatique de premier !radient7 nous
nous intressons au mod4le de second !radient de dilatationC On notera pour la
suite du document :
#F& ;C$& Application du mod4le de second !radient olumique A la dynamique
=
b
s
(1++)(12+)
E
=
b
s
(1+)
j2
l
2
R;C;HS
Les quations du mouement rsultent de l'quilibre lastique7 respectiement :
R;C;9S
Les modes de ibration de cisaillement ne sont pas a@@ects par le second !radient
de dilatationC -n reanc"e7 les modes et pulsations propres de ibration
lon!itudinale sont solutions d'un noueau probl4me de minimisation du quotient de
'aylei!" :
o
2
(U)=
|
D
E(1+)U
. , .
2
v+(1++)(12+)
|
D
b
s
U
. , ..
2
v
(1++)(12+)
|
D
jU
i
U
i
v
\'
*
V
0
R;C;FS
Le probl4me ariationnel associ admet comme quation d'-uler l'quation locale
dduite de l'quation locale d'quilibre dynamique crite plus "aut :
E
(1++)(12+)
((1+)U
. , ..
U
. , ....
)+jo
2
U
.
=0 R;C;:S
La relation de N dispersion O peut Btre obtenue en supposant un mode de ibration
du type U ( . )=ce
ik.
7 c+ tant une constante et k tant le nombre d'onde :
E
(1++)(12+)
( k
4
+(1+) k
2
)jo
2
=0 = 2
l
2
(
1+
k
4
+k
2
)
o
2
=0 R;C;8S
Les solutions complexes de l'quation ;C;8 sont les suiantes :
k = !
.
1+
2 (
1!
.
1+
4o
2
2
l
2
(1+)
)
= !
.
E (1+)!
.
E
2
(1+)
2
+4D
s
(1++)
2
(12+)
2
jo
2
2D
s
(1++)(12+)
R;C;;S
Ces ondes sont dispersiesC La itesse de p"ase o/ k et la itesse de !roupe Rqui
r!it la propa!ation de l'ner!ieS
do
d k
=2
l
2 k
o
(
2
1+
k
2
+1
)
di@@4rent donc de la
itesse des ondes lastiques 2
l
Rsans second !radientS et dpendent de la
lon!ueur d'onde
2n
+( k)
C
2eux nombres d'ondes sont rels 7 les deux autres sont ima!inaires pursC C'est
!alement le cas pour le mod4le de @lexion d'une poutre aec cisaillement
; Annexes #F$
Rcinmatique de Timos"enIo RGibert7 $;88SSC
La rpartition spatiale de c"aque mode est donc une combinaison :
U ( . )=c
1
c/s k
1
.+c
2
sin k
1
.+c
3
c/sh k
2
.+c
4
sinh k
2
. R;C$&&S
aec les rels :
k
1
=
.
E(1+)+
.
E
2
(1+)
2
+4D
s
(1++)
2
(12+)
2
jo
2
2D
s
(1++)(12+)
k
2
=
.
E(1+)+
.
E
2
(1+)
2
+4D
s
(1++)
2
(12+)
2
jo
2
2D
s
(1++)(12+)
R;C$&$S
+our un param4tre N petit O par rapport au carr de la lon!ueur d'onde lastique
\=2n2
l
/ o
Rc'est A dire pour une lon!ueur caractristique du second !radient
petite deant la lon!ueur d'onde lastique lon!itudinaleS7 on a les deux nombres
d'onde rels7 delopps au $
er
ordre en
/ \
2
7 pour des modes ondulatoires :
k-
!o
2
l
(
1
o
2
32n
2
2
l
2
)
R;C$&#S
sac"ant que les deux autres nombres d'onde7 ima!inaires7 ont un module qui tend
ers l'in@ini7 donc correspondant A des solutions de tr4s "aute @rquence7 que l'on ne
consid4rera pas dans une situation sismique Ron admet en !nral f 3301 SC
La itesse de !roupe
d o
d k
est alors !ale A 2
l
(
1
n
2
2
(1+)\
4
)
au H
4me
ordre en
/ \
2
C
+our obtenir les constantes
c
1
7
c
2
7
c
3
et
c
4
non nulles caractrisant les
modes7 il @aut exploiter les conditions aux limites :
U
.
(H) = 0 = c
1
c/sk
1
Hc
2
sin k
1
H ,,,
,,,+c
3
c/sh k
2
Hc
4
sinhk
2
H
U
. , .
(0)bU
. , ...
(0) = 0 = (1+)(k
1
c
2
+k
2
c
4
)+( k
1
3
c
2
k
2
3
c
4
) =0
U
. , ..
(0) = 0 = k
1
2
c
1
+k
2
2
c
3
U
. , ..
(H) = 0 = k
1
2
(c
1
c/sk
1
Hc
2
sin k
1
H ),,,
,,,+k
2
2
(c
3
c/sh k
2
Hc
4
sinh k
2
H)=0
R;C$&=S
Le dterminant de ce syst4me doit Btre nul pour obtenir des solutions non triialesC
Cette condition introduit dans les nombres d'ondes une dpendance A la "auteur (
#F# ;C$& Application du mod4le de second !radient olumique A la dynamique
de la colonne de solC -n pratique7 on aura une aleur k
j
H plutMt @aible Rles
lon!ueurs d'onde ont un ordre de !randeur proc"e de la "auteur de couc"e de solSC
,l deient par consquent di@@icile de n!li!er les termes exponentiels
e
k
j
H
dans le
syst4me ci/dessusC
D-,A-9 A00#ic&ti!n &. m!;ements 0r!0res *8ne c!c7e *e
s!# 0!r!"#&sti3e
D-,A-9-, M!*es *e ;i%r&ti!n en 0!r!"#&sticit #in&ire
On n!li!e ci/apr4s7 "ypot"4se propose par .ienIieUic3 et alC R$;8&S Rcit par
Coussy R#&&HSS7 les @orces d'inertie proenant de l'coulement relati@ du @luide par
rapport au milieu poreux lui/mBme7 dont le dplacement est not '( . ,t ) C Le mi/
lieu poreux a une masse olumique "omo!nise j C Le coe@@icient de )iot
b
B
est supos !ale A $ Rcoupla!e poro/lastique7 qui d@init les contraintes e@@ectiesS
et une saturation
1
lq
!ale A $C La masse olumique du @luide Rl'eauS est !ale A
j
lq
=1000 kg/ m
3
et la permabilit "ydraulique du milieu A l'eau
lq
H
=
K
int
()k
lq
rel
( 1
lq
)
j
lq
(: )
Rmesure en
m
3
s/ kg
SC Les termes interenant dans la
d@inition de la permabilit "ydraulique sont les permabilits intrins4que et relatie
et la iscosit dynamique de l'eau A la temprature ambianteC Finalement la per/
mabilit est donne par la relation K=
lq
H
j
lq
g 7 aec l'acclration de pesanteurC
Le coe@@icient caractristique de consolidation c
v
=\
lq
H
E/ b
B
2
pilote la dure du pro/
cessus de consolidation quasi/statique R '0% de la consolidation est atteinte
apr4s un dlai de t
c
=H
2
/ c
v
SC
Les mouements propres ibratoires lastiques de cisaillement ne sont pas a@@ects
par l'coulement du @luide : la solution est la mBme qu'en lasticitC
Les mouements propres ibratoires lon!itudinaux erticaux
'
.
( . , t )
ri@iant
c
,,
=c
--
=c
,-
=c
-.
=c
,.
=0
accompa!ns du c"amp de pression de @luide intersti/
tiel p( . , t ) de la colonne de sol poro/lastique sont r!is par les quations sui/
antes :
E
1+
(1++)(12+)
'
. , ..
( . ,t )p
, .
( . ,t )j'
. ,tt
( . , t )=0 mcani8ue
lq
H
p
, ..
( . , t )'
. , .t
( . ,t )=0 hEdrauli8ue
R;C$&HS
On note 2
l
=
.
(
E
j
1+
(1++)(12+)
)
la itesse des ondes lastiques lon!itudinales
et le nombre sans dimension o=
lq
H
E
H 2
l
1+
(1++)(12+)
qui pilote l'c"elle de
; Annexes #F=
temps de consolidation comme en quasi/statique7 H tant la "auteur de la co/
lonne de solC
Les conditions aux limites sont les suiantes :
bloca!e en dplacement au pied de la colonne :
'
.
(H ,t )=0
tanc"it au pied de la colonne :
p
, .
(H , t )=0
sur@ace libre en tBte:
p
, .
(0, t )=0
et c
..
(0, t )=0=j2
l
2
'
. , .
(0, t )p(0,t )
Le syst4me di@@rentiel r!issant les mouements propres ibratoires se rduit sous
@orme adimensionnelle de la mani4re suiante :
'
' '
p
'
'=0 mcani8ue
o p
' '
'
'
=0 hEdrauli8ue
dans 0,1| ,+|
R;C$&9S
Ayant introduit : .=H((1) 7
t =tH / 2
l
7 '='
.
/ H
7 p=p/ j2
l
2
et les no/
tations des dries partielles : f
'
= f
,(
et
f = f
,t
C
On c"erc"e les solutions non triiales du syst4me ;C$&9 du type
'((, t)=
Ue
i (
e
i ot
7
'((, t)=
#e
i (
e
i ot
aec 0 et o complexesC
On obtient ainsi la relation de dispersion Rliant la lon!ueur d'onde A la pulsation
complexeS :
2
o
2
i
o o
2
=0 = =!i
.
o(o o+i )
o
R;C$&FS
Les ondes prsentent donc !alement un caract4re dispersi@C Les conditions aux li/
mites "omo!4nes sur le domaine 0,1| sont : '(0, t)=0 7
p
'
(0, t)=0
'
'
(1,t)=0
et p(1, t)=0 C
Les solutions prennent donc ncessairement les expressions suiantes :
'((,t) =
U+( ( e
i (
e
i (
) e
i ot
)
p((, t) = #+( ( e
i (
e
i (
) e
i ot
)
R;C$&:S
Aec
e
i
+e
i
=0
7 soit :
k aec
k + et c/s(
k )=0 soit
k
m
=( 2m1)n/ 2
aec m=1,2,3 ,,,,
On obtient alors la @amille dnombrable des pulsations complexes adimension/
nelles :
#FH ;C$& Application du mod4le de second !radient olumique A la dynamique
o
m
!
=
1
2o
( i!
.
14o
2
k
m
2
)
R;C$&8S
La itesse de !roupeRqui r!it la propa!ation de l'ner!ieS est
o
k
=
4o
k
m
.
14o
2
k
m
2
C
La aleur o=1/n-0,31(3 Rpour m=1 S constitue la transition entre un cas7
o> o oZ le r!ime d'ondes sera uniquement ondulatoire anescent Rceci est du
au terme ima!inaire dans la pulsation7 \m 7 la itesse de !roupe est alors ima!i/
naireS et un cas o o de r!ime mixte propa!ati@/anescentC
La relation de dispersion en poro/lasticit n'est pas analo!ue A celle d'un milieu
isco/lastique Rde coe@@icient c S : o=
c
2j
k ( 1!
.
1+4F
l
2
j
2
/ c
2
) aec k + C
+our un milieu poreux tr4s permable7 c'est A dire o-+ 7 on retroue l'expres/
sion de la relation de dispersion en lasticit ordinaire : =! o=k=!o/2
l
C -n
e@@et7 dans ce cas les pressions s'quilibrent et ne %ouent plus sur la rponse du sys/
t4meC
+our un milieu poreux quasi/impermable7 c'est A dire o-0 7 on est dans le cas
d'une perturbation sin!uli4reC
D-,A-9-/ M!*es *e ;i%r&ti!n en 0!r!"#&sticit #in&ire &;ec sec!n*
5r&*ient *e *i#&t&ti!n
L'ob%et de ce para!rap"e consiste A introduire la modlisation aec second !radient
de dilatationC On note tou%ours
=
b
s
(1++)(12+)
E
=
b
s
(1+)
j2
l
2
C On !arde les
mBmes "ypot"4ses de modlisation du milieu poreux que ci/dessusC Les
mouements propres lon!itudinaux erticaux
'
.
( . , t )
ri@iant
c
,,
=c
--
=c
,-
=c
-.
=c
,.
=0
accompa!ns du c"amp de pression de @luide
interstitiel p( . , t ) de la colonne de sol poro/lastique sont r!is par les quations
suiantes :
E
(
(1+) '
. , ..
( . ,t )'
. , .... ( . ,t )
p
, .
( . ,t )j'
. ,tt
( . , t )
)
(1++)(12+)
=0 mcani8ue
lq
H
p
, ..
( . , t )'
. , .t
( . , t )=0 hEdrauli8ue
R;C$&;S
Ce syst4me R;C$&;S se rduit sous @orme adimensionnelle de la mani4re suiante :
; Annexes #F9
'
' '
H
2
(1+)
'
' ' ' '
p
'
'=0 mcani8ue
o p
' '
'
'
=0 hEdrauli8ue
dans 0 , 1| ,+| R;C$$&S
Aec les mBmes c"oix de ariables adimensionnelles que prcdemmentC La
relation de dispersion associe A ce syst4me di@@rentiel7 reliant les pulsations
adimensionnelles de solutions modales ibratoires du type
'((, t)=
Ue
i (
e
i ot
7
'((, t)=
#e
i (
e
i ot
aux nombres d'ondes adimensionnels aec 0 et o
complexes s'crit :
4
H
2
(1+)
+
2
+
o o
2
+i o
o
=0
R;C$$$S
Soit les quatre nombres d'ondes adimensionnels :
=!
.
H
2
(1+)
2
(
1!
.
1
4( o o
2
+i o)
o H
2
(1+)
)
R;C$$#S
Les ondes ont donc !alement un caract4re dispersi@C Les conditions aux limites
"omo!4nes sur le domaine 0,1| sont :
'(0, t) = 0
'
' '
( 0,t) = 0
p
'
(0,t) = 0
'
'
(1, t) =
H
2
(1+)
'
' ' '
(1, t)
'
' '
(1, t) = 0
p(1, t) = 0
R;C$$=S
Le dterminant du syst4me linaire construit aec ces conditions sur les
composantes
U et
# doit Btre nul a@in d'aoir des solutions non triiales7 ce qui
donne une condition sur les nombres d'onde adimensionnelsC
+our une aleur @aible du coe@@icient
o
H
2
7 c'est A dire pour une lon!ueur
caractristique du second !radient petite deant la lon!ueur d'onde lastique
lon!itudinale7 l'expression de deloppe au $
er
ordre permet d'obtenir les deux
nombres d'onde suiants :
-!
.
o( o o+i )
o
(
1
o(o o+i )
o H
2
(1+)
)
R;C$$HS
Les deux autres nombres d'onde ont un module qui tend ers l'in@ini7 correspondant
#FF ;C$& Application du mod4le de second !radient olumique A la dynamique
donc A des solutions de tr4s "aute @rquence7 non prise en compte dans une
situation sismique R f 3301 SC On ri@ie bien qu'en supprimant le terme de
second !radient de dilatation dans l'ner!ie libre R =0 S7 on retroue l'expression
de dispersion en poro/lasticit ordinaire RY;C$&CHC$ SC
; Annexes #F:
D-,, Tenser #&st!0#&sti3e * m!*+#e H1e. t(0e
C&m"C#&( @HCCB
+our la suite du probl4me tudi7 le mod4le de comportement local appliqu au
premier !radient est issu du mod4le de (u%eux simpli@iC Un unique mcanisme plan
diatoire monotone est considr et les param4tres sont c"oisis de telle sorte A
retrouer le mod4le de Cam/Clay ori!inal limit A un plan7 en posant b=1 7
r
el
=1 C La sur@ace de c"ar!e du mod4le prend alors la @orme suiante:
f
k
=q
k
+"p
k
(
1ln
(
p
k
#
c
( c
v
p
)
)
)
7 aec
p
k
9
c
ii
+c
jj
2
q
k
9
.
(
1
2
( s
k
)
ij
: ( s
k
)
ij
)
( s
k
)
ij
9 (c
k
)
ij
p
k
(6
k
)
ij
#
c
9 #
c!
exp
(
c
v
p
)
R;C$$9S
Les r4!les d'coulement plastique sont donnes par l'expression suiante:
c
ij
p
=
\(1
k
)
ij
aec
(
1
k
)
ij
=
(
s
k
)
ij
28
k
1
2
(
sin +
q
k
p
k
)
/
ij
et /
ij
=
|
1 0
0 1
R;C$$FS
\ reprsente le multiplicateur plastique obtenu A partir de l'quation de
consistance7
f
k
=0 C
La partie lastique ou de dc"ar!e plastique du mod4le constituti@ local est contrMl
par la relation suiante:
|
c
11
c
22
c
12
=
|
K+
4
3
G K
2
3
G 0
K
2
3
G K+
4
3
G 0
0 0 2G
|
c
11
c
22
c
12
R;C$$:S
aec K et G les modules de compressibilit et de cisaillement respectiementC
+our la suite de l'exemple trait7 il est intressant d'exprimer sous sa @orme explicite
la matrice constitutie lasto/plastique du mod4le #2 dans le but d'analyser
l'in@luence des param4tres matriaux et de l'tat de contraintes sur la rponse @inale
de la structureC Le tenseur se construit d'apr4s l'expression suiante:
c
ij
=H
ijkl
ep
c
kl
=
(
H
ijkl
e
H
e
1
f
c
H
e
h+
f
c
H
e
1 )
c
kl
R;C$$8S
#F8 ;C$$ Tenseur lastoplastique du mod4le (u%eux type Cam/Clay R(CCS
Les di@@rents termes de H
ijkl
ep
sont donns ci/dessous:
H
1111
ep
=K+
4
3
G
(
G
1
11
k
q
k
(
K+
G
3
)
(
sin +
q
k
p
k
))
(
G
1
11
k
q
k
"
(
K+
G
3
)
ln(
p
k
#
c
)
)
A
H
1122
ep
=K
2
3
G
(
G
1
11
k
q
k
(
K+
G
3
)
(
sin+
q
k
p
k
))
(
G
1
22
k
q
k
"
(
K+
G
3
)
ln(
p
k
#
c
)
)
A
H
1112
ep
=
(
G
1
11
k
q
k
(
K+
G
3
)
(
sin+
q
k
p
k
))
G
1
12
k
q
k
A
H
1211
ep
=
G
1
12
k
q
k
(
G
1
11
k
q
k
"
(
K+
G
3
)
ln
(
p
k
#
c
))
A
H
1212
ep
=2G
(
G
1
12
k
q
k
)
2
A
H
1222
ep
=
G
1
12
k
q
k
(
G
1
22
k
q
k
"
(
K+
G
3
)
ln
(
p
k
#
c
))
A
H
2211
ep
=K
2
3
G
(
G
1
22
k
q
k
(
K+
G
3
)
(
sin+
q
k
p
k
))
(
G
1
11
k
q
k
"
(
K+
G
3
)
ln (
p
k
#
c
)
)
A
H
2212
ep
=
(
G
1
22
k
q
k
(
K+
G
3
)
(
sin+
q
k
p
k
))
G
1
12
k
q
k
A
H
2222
ep
=K+
4
3
G
(
G
1
22
k
q
k
(
K+
G
3
)
(
sin +
q
k
p
k
))
(
G
1
22
k
q
k
"
(
K+
G
3
)
ln(
p
k
#
c
)
)
A
aec
A=G
(
1
11
k
q
k
)
2
+G
(
1
12
k
q
k
)
2
+"( K+
G
3
) ln
(
p
k
#
c
)(
sin +
q
k
p
k
)
+
1
2
" p
k
(
sin+
q
k
p
k
)
; Annexes #F;
D-,/ D!m&ine *es *irecti!ns inst&%#es se#!n #e crit+re *e
Rice
L'al!orit"me tabli ci/dessous s'appuie sur les crits du mmoire de t"4se de
1ossou!"i R#&&$SC La dmonstration est mene pour un probl4me bi/dimensionnelC
+our un probl4me en #27 9=nHn 7 le tenseur acoustique RqC FC=& pour le cas
bilinaireS7 est un tenseur d'ordre #C On traite donc une matrice carre #x# et on
peut calculer directement le dterminant de 9 :
et (9(n))=
0
n
1
4
+
1
n
1
3
n
2
+
2
n
1
2
n
2
2
+
3
n
1
n
2
3
+
4
n
2
4
R;C$$;S
aec
0
9 H
1111
H
1212
H
1112
H
1211
1
9 H
1111
H
1222
H
1111
H
2212
H
1112
H
2211
H
1122
H
1211
2
9 H
1111
H
2222
H
1112
H
1222
H
1211
H
2212
H
1122
H
1212
H
1122
H
2211
H
1212
H
2211
3
9 H
1112
H
2222
H
1211
H
2222
H
1122
H
2212
H
1222
H
2211
0
9 H
1212
H
2222
H
2212
H
1222
Considrons les deux composantes du ecteur n [ soient n
1
=c/s 0 et
n
2
=sin0
R 0 n/ 2, n/ 2 S et supposons j=tan 0 : l'quation ;C$$;
prendra alors la @orme suiante :
et (9(n))=f (j)=
4
j
4
+
3
j
3
+
2
j
2
+
1
j+
0
=0 R;C$#&S
2'une mani4re !nrale7 aant la localisation des d@ormations7 le polynMme
f (j) est positi@ dans tout le domaineC
-n examinant le si!ne de la aleur minimale de ce polynMme7 on peut dtecter le
dbut de la localisationC ,l conient de prciser que tant que la aleur minimale de
f (j) est positie7 la localisation des d@ormations ne se mani@este pas dans le
domaine au sens du crit4re de 'iceC
#:& ;C$# 2omaine des directions instables selon le crit4re de 'ice
; Annexes #:$
D-,4 Sim#&ti!n *8n ess&i %i&.i&# *r&in sr s&%#e
*8H!stn = DRR9AK
Les param4tres matriau ont t tablis par Lope3/Caballero et alC R#&&=bS Rtableau
;C:SC
PARAMETRES
HOSTUN
DRR9AK
PARAMETRES
HOSTUN
DRR9AK
#
0
( "#+) /&7$
ETAT CRITILUE H PLASTICITE PAR"
FAITE
ELASTICITE
==
K ( "#+) $H8
=&
G( "#+) F8
#79
n
e
& b &7#
#
ref
( "#+) /$ #
7!
( "#+) /&7H
LOI D8ECOULEMENT H ECROUISSAGE SEUIL DES DOMAINES
==
r
, m)n
el+
&7&$&
+
m)n
&7&$:&
r
,c-c
el+
&7&$&
+
c-c
&7&&&$ r
h-s
&7&9
c
m)n
&7&8 r
m)b
&7;
c
c-c
&7&H
r
is)
el+
&7&&&$
,
m
$ o $
T&%#e& D-C $ P&r&m+tres m&tri& * m!*+#e *e H1e. 0!r #e s&%#e *8H!s"
tn = D%=40% @L!0eF"C&%&##er! et &#-? /AA4%B
Le comportement du sable d'(ostun A D%=40% est prsent dans les plans
classiques caractristiques de la mcanique des sols7 ( p , q) 7 (c
1
, j) 7
( p ,c
v
) et (c
1
, c
v
) C On retroue sur les illustrations ;CH# et ;CH= les rsultats
aec le mod4le (?S et le mod4le de (u%eux completC Les deux mod4les @ournissent
des rsultats tr4s proc"es pour l'essai biaxial drain pour les trois nieaux de
con@inement initial donn7
c
3
=|!0 ,100,1!0 k#+
C Les d@ormations
olumiques sont nanmoins plus importantes aec le mod4le (?S que le mod4le
complet aant d'atteindre l'tat critique du matriauC
#:# ;C$= Simulation d'un essai biaxial drain sur sable d'(ostun A 2'VH&W
La procdure mise en place pour le sable d'(ostun A D%=((% est A prsent
applique au sable d'(ostun A D%=40% C L'olution de
b
s
en @onction de
c
3
peut Btre assimile A une droite Roir illustration ;CHHSC Un @acteur de rduction
de 9& a d%A t appliqu aux aleurs prsentes pour une lar!eur de bande de
4 cm C Les rsultats prsents ci/dessous ont en e@@et montr que ce @acteur de
rduction est sensible aux proprits matriaux utilisesC
Illustration ".*2 : 2ponse du mod$le :J4 E un essai bia9ial drain pour un sable d':ostun E
D%=40%
Illustration ".*' : 2ponse du mod$le de :u6eu9 E un essai bia9ial drain pour un sable
d':ostun E D%=40%
; Annexes #:=
Les calculs mens aec le sable d'(ostun A
D%=40% ont pos plus de probl4mes
numriques que ceux e@@ectus aec les
param4tres matriaux du sable d'(ostun A
D%=((% C La coner!ence !lobale des
calculs a pu Btre obtenue uniquement en
utilisant une mt"ode de pilota!e disponible
dans CodeTAsterC -n e@@et7 mBme le
recours A un al!orit"me de *eUton/
'ap"son modi@i n'a pas t en mesure de
satis@aire la coner!ence du calcul aec ce
%eu de param4tresC *otre c"oix pour la
mt"ode de rsolution itratie s'est alors
port sur la mt"ode de *eUton 'ap"son
modi@i coupl A la mt"ode de pilota!e
prsente au Y:C9CH C
(amadi R#&&FS a notamment montr que les cMnes d'instabilits matrielles tablis
pour ce %eu de param4tres apparaissent plus tMt et sont plus lar!es que ceux
obtenus pour le sable d'(ostun A D%=((% 7 ce qui pourrait %usti@ier les di@@icults
supplmentaires pour raliser cette tude Rillustration ;CH9SC Ces rsultats ont
!alement t retrous aec nos deloppements analytiques relati@s au mod4le
de (u%euxC
Les simulations sur le sable
d'(ostun A D%=40% ont t
ralises pour le nieau de
con@inement initial
c
3
=!0 kPa
C
-n se reportant aux aleurs
estimes pour le module lastique
du mod4le de second !radient
b
s
Rillustration ;CHHS7 les rsultats
sont apparus concluant pour
l'estimation de la 3one d'in@luence7
c'est A dire la lar!eur de bandes de
cisaillement pour un @acteur de
rduction !al A 9& Rillustration
;CHF et ;CH:SC
On peut noter que lorsque la aleur
du module de ri!idit est trop
importante7 les rsultats restent "omo!4nes dans l'c"antillon tant pour la rponse
!lobale Rillustration ;CHFaS que pour l'tat de d@ormations dans l'c"antillon
Rillustration ;CHFbSC
La aleur du @acteur de rduction olue donc en @onction des proprits matriaux
considresC -lle est tablie A partir d'un principe d'essais erreurs tout en sac"ant
que la lar!eur de la bande de cisaillement arie en
.
b
s
C
Illustration ".** : (5olution de b
s
en
fonction c
3
pour le sable d':ostun E
D%=40% pour l
c
=0,04m rduit
d'un facteur 1!
Illustration ".*1 : +Mne d'instabilits pour un
c-emin bia9ial drain en dformations planes pour
un sable d':ostun E D%=40% (rouge
discontinu) et un E D%=((% (noir continu)
#:H ;C$= Simulation d'un essai biaxial drain sur sable d'(ostun A 2'VH&W
L'ide directrice permettant de %usti@ier l'olution de ce @acteur proient de la
contribution des di@@rents mcanismes plastiques du mod4le de (u%eux7 autre que
l'unique mcanisme considr dans le cadre du probl4me analytique abord au
Y:CHC$ C
-n ue de la section :CF oZ une tude
stabilit de pente sera mene aec les
proprits matriaux prsentes dans les
tableaux :C$ et ;C: pour le mod4le de (u%eux
complet7 il est ncessaire de quanti@ier le
@acteur de rduction A appliquer sur la aleur
du module
b
s
7 dmarc"e pralablement
mene pour le sable d'(ostun A D%=((%
Rillustration :C=9SC Les rponses du mod4le de
(u%eux complet ont en e@@et montr une
di@@rence quantitatie sur c
v
p
par rapport au
mod4le (?S Rillustration ;CH=S qui suppose
une in@luence sur la aleur du @acteur de
rduction A appliquerC
L'essai biaxial simul est A un con@inement
initial
c
3
=!0 kPa
C Le c"ar!ement est
appliqu suiant une discrtisation de
U
-
=0,02mm
C Les rsultats ont montr A
noueau la ncessit de rduire la aleur de
b
s
Rillustration ;CH8 et ;CH;SC
Illustration ".*B : (gauc-e . a) 2ponse globale de l'c-antillon dans le plan force
dplacement ; (droite = b)Lrofil de c
v
p
selon une coupe centrale 5erticale ; pour un sable
d':ostun E D%=40% c
3
=!0 kPa et b
s
=| (&!< ((< 3!< 1! #+;m
2
E
U
-
=3,2cm a5ec le mod$le :J4
Illustration ".*& : Indicateur de plasticit
du mcanisme "
2
m
du mod$le :J4
E U
-
=3,2cm pour le sable
d':ostun E D%=40%
c
3
=!0 kPa et b
s
=1!Pa,m
2
; Annexes #:9
Illustration ".*" : (gauc-e . a) 2ponse globale de l'c-antillon dans le plan force
dplacement ; (droite = b)Lrofil de c
v
p
selon une coupe centrale 5erticale ; pour un sable
d':ostun E D%=40% c
3
=!0 kPa et b
s
=| (&!< ((< 3!< 1! #+;m
2
E
U
-
=3,2cm a5ec le mod$le de :u6eu9 complet
Illustration ".*0 : Indicateur de plasticit du mcanisme "
2
m
du mod$le de :u6eu9
complet E U
-
=3,2cm pour le sable d':ostun E D%=40% c
3
=!0 kPa et
b
s
=| 3!,1!,' #+;m
2
(5aleur de b
s
E affecter de gauc-e E droite)
#:F ;C$= Simulation d'un essai biaxial drain sur sable d'(ostun A 2'VH&W
; Annexes #::
D-,9 An&#(se *e st&%i#it *e 0ente &;ec #& mt7!*e *es
tr&nc7es *e Pis7!0
Une des mt"odes utilises dans l'in!nierie pour d@inir la stabilit d'un talus sous
c"ar!ement d'une @ondation super@icielle est par exemple la mt"ode des tranc"es
selon )is"opC
Le lo!iciel Talren H delopp par Terrasol o@@re la possibilit de raliser des tudes
de stabilit de pente selon cette mt"odeC La c"ar!e limite obtenue est !ale A
8#I+a pour un sol modlis aec un mod4le de comportement de Mo"r/Coulomb
aec un an!le de @rottement !al A == de!rsC Les illustrations ;C9&a et ;C9&b
permettent de comparer les pro@ils de rupture obtenus aec CodeTAster et Talren HC
La discrtisation spatiale du mailla!e utilis @aorise le deloppement du mode de
ruine prsent ci/dessousC Les indicateurs de plasticit du mcanisme "
3
m
r4lent un mode de ruine oZ les sur@aces de !lissement oluent Rcompris A
l'inter@ace entre les 3ones en dc"ar!e RbleuS et en c"ar!e Rrou!eS7 illustration ;C9$SC
La d@inition du cercle de rupture sous Talren H
conditionne !alement @ortement la aleur de la
c"ar!e limiteC L'illustration ;C9# permet de
constater dans le plan @orce dplacement en tBte
de talus au nieau de la @ondation super@icielle les
di@@rences obtenues entre les deux codes pour la
c"ar!e limite supporte par le sol aant
d'atteindre son tat de rupture R;$I+a aec
CodeTAster et 8#I+a aec Talren HSC La
Illustration ".1! : (gauc-e . a) Dforme -oriIontale (9*) du sol sous le c-argement de la
fondation superficielle en tAte de talus apr$s enfoncement de 1! cm le sol tant modlis par
un mod$le :u6eu9 modifi t>pe 3o-r.+oulomb a5ec crouissage isotrope ; (droite = b) cercle
de rupture obtenu a5ec #alren selon la mt-ode de Jis-op
Illustration ".11 : Pisualisation au points de <auss de l'indicateur de plasticit "
3
m
sous le
c-argement de la fondation en tAte de talus apr$s enfoncement de 2cm et 10cm pour le
mod$le de :u6eu9 modifi t>pe 3o-r.+oulomb a5ec crouissage isotrope
Illustration ".12 : +-arge appli)ue
sur la fondation situe en tAte de
talus
#:8 ;C$H Analyse de stabilit de pente aec la mt"ode des tranc"es de )is"op
di@@rence entre les deux aleurs est de $&W mais peut Btre ramene au pro@il de
rupture plus !rand sous CodeTAster7 qui sollicite une partie du massi@ non pris en
compte par Talren H Rillustration ;C9$SC
-n conclusion de cette tude7 les simulations ralises sous CodeTAster permettent
de retrouer les aleurs de c"ar!e limite pour des mod4les de comportement
simpli@i7 en comparaison des rsultats obtenus par les mt"odes de
dimensionnement classiques type mt"ode des tranc"es de )is"opC Ce point est
important7 car il permet d'aoir une con@iance raisonnable sur les rsultats obtenus
pour des mod4les de comportement plus olusC
$& )iblio!rap"ie #:;
,A Pi%#i!5r&07ie
*C Abou/)eIrC Modlisation du comportement mcanique et "ydraulique des sols
partiellement satursC T"4se de doctorat7 (cole +entrale Laris7 $;;9C
AC A"adi7 SC 5renIC ,mplicit inte!ration o@ plasticity models @or !ranular materialsC
+omput. 3et-. /ppl. 3ec-. Cngrg.7 $;# : =H:$/=H887 #&&=C
5A Als"ibli7 S* )atiste7 SC StureC Strain locali3ation in Sand : +lane Strain ersus
Triaxial CompressionC J. <eotec-nical <eoen5ironmental Cngng7 $#;RFS : H8=/
H;H7 #&&=C
AC Al/TabbaaC Lermeabilit> and stress.strain response of spesQ-ite ,aolinC T"4se de
doctorat7 Uniersit de Cambrid!e7 $;8:C
AC Al/Tabbaa et 2C MC LoodC An experimentally based bubble model @or clayC Lroc.
'
rd
Int. +onf. on Rumerical 3odels in <eomec-anics7 *ia!ara Falls7 ;$/;;7
$;8;C
SC Andrieux7 MC ?oussement et -C Lorent3C Une classe de mod4les de
comportement aec !radients de ariables internes : construction par
"omo!nisationC Laris +.2./cad.4ci.7 T=#=7 Srie ,,b :F#;/F=F7 $;;FC
FC Armero et 5C GariIipatiC 'ecent Adances in t"e Analysis and *umerical
Simulation o@ Strain Localisation in ,nelastic SolidsC ,n 2C OUen7 -C Onate and
-C (inton R-dsS7 Lroceedings of +omputational Llasticit> IP Jarcelona7 ppC
9H:/9F$C C,M*-7 $;;9C
FC Armero7 AC +re3/Fo!uetC On t"e @ormulation o@ closest point pro%etcion al!orit"ms
in elastoplasticityC +art , : T"e ariational structureC Int. J. Rumer. 3et-ods
Cng.7 9=R#S :#;:/=#;7 #&&#C
(C AsIes7 ?C +amin et 'C de )orstC 2ispersion analysis and element @ree GalerIin
solutions o@ second and @ourt" order !radient/en"anced dama!e modelsC Int.
J. Rum. 3et-. Cngrg7 H; :8$$/8=#7 #&&&C
(CAsIes7 LC?CSluysC -xplicit and implicit !radient series in dama!e mec"anicsC
Curopean Journal of 3ec-anics = /F4olids7 #$R=S :=:;/=;&7 #&&#C
2C Aubry7 ?C (u%eux7 FC Lassoudi4re et 6C MeimonC A double memory model Uit"
multiple mec"anisms @or cyclic soil be"aiorC Int. 4>mp. on Rumerical 3odels
in <eomec-anics7 .eric"7 pC=/$=7 $;8#C
2C Aubry7 AC Modaressi7 (C ModaressiC A constitutie model @or cyclic be"aiour o@
inter@aces Uit" ariable dilatancyC +omputers and <eotec-nics7 ;R$/#S :H:/987
$;;&C
2C Aubry7 (C ModaressiC Seismic Uae propa!ation in soils includin! non/linear and
pore pressure e@@ectsC ,n 2aidoici editor7 'ecent Adances in eart"quaIe
en!ineerin! and structural dynamics7 Ouets edC7 pC#&;/##H7 $;;#C
#8& $& )iblio!rap"ie
2C Aubry7 AC ModaressiC <CDD>n 3anuel scientifi)ue7 -cole Centrale +aris7 LMSS/
Mat7 $;;F
6C )amber!erC 3cani)ue de l'ingnieur = #ome 2. Jditions (ermann7 +aris7 $;8$C
6C )amber!erC 3cani)ue de l'ingnieur = #ome ' (c-. *). Jditions (ermann7 +aris7
$;;:C
'C )ar!elliniC -aluation tec"nique de la mt"ode ,M+L/-d d'OlierC C'/AMA/
&;C&#;7 H& pa!es7 #&&;C
?2 )arnic"onC Contribution o@ t"e boundin! sur@ace plasticity to t"e simulation o@
!allery excaation in plastic claysC Cngineering <eolog>7 FH : #$:/#=$7 #&&#C
?L )ato37 GC 2"attC Modlisation des structures par lments @inisC Polume 1 Laris
Cditions :erm$s7 H99 pa!es7 $;;&C
.+ )afantC Mec"anics o@ 2istributed CracIin!C /pplied 3ec-anics 2e5ieQ
=;R9S :F:9/:&97 $;8FC
.+ )afantC *on/local dama!e t"eory based on micromec"anics o@ cracI
interactions7 ASC- ?C -n!n! Mec"C7 $#&R=S : 9;=/F$:7 $;;HC
.+ )afant et MC ?irHseIC *onlocal inte!ral @ormulations o@ plasticity and dama!e :
surey o@ pro!ressC J. Cng. 3ec-. /4+C7 $#8 :$FFF/$F;#7 #&&#C
TC )elytsc"Io7 ?C Fis"7 )- -n!lemanC A @inite element Uit" embedded locali3ation
3onesC Computer Met"ods in Applied Mec"anics and -n!ineerin!7 :& :9;/8;7
$;88C
AC )enallal7 'C )illardon et GC GeymonatC Some mat"ematical aspects o@ dama!e
so@tenin! rate problemC ,n ?C Ma3ars and .C )afant editors7 Lroc +rac,ing and
Damage7 pa!es #H:/#98C -lseier7 $;88C
AC )enallal7 'C )illardon et GC GeymonatC Conditions de bi@urcation A l'intrieur et
aux @ronti4res pour une classe de matriaux non standardsC CC 'C AcadC SciC7
$;8;C
AC )enallal7 CC ComiC Locali3ation analysis ia a !eometrical met"odC Int. J. 4olids
4tructures7 ==R$S :;;/$$;7 $;;FC
AC )enallal7 CCComiC Material instabilities in inelastic saturated porous media under
dynamic loadin!sC Int. J. 4olids 4truct.7 =; :=F;=/=:$F7 #&&#C
AC )enallal7 CCComiC +erturbation !roUt" and locali3ation in @luid/saturated inelastic
porous media under quasi/static loadin!sC J. 3ec-. L->s. 4olids 9$ : 89$/
8;;7 #&&=C
?C )esson7 GC Cailletaud7 ?L C"aboc"e7 SC ForestC Mcanique non linaire des
matriauxC Laris :erm$s 4cience Lublications7 #&&$C
?C )iare37 +6 (ic"erC -lementary mec"anics o@ soil be"aiour7 saturated and
remolded soilsC // Jal,ema7 Amsterdam7 *et"erlands7 $;;HC
$& )iblio!rap"ie #8$
2C )i!oni7 TC (uecIelC Uniqueness and locali3ation/,C Associatie and nonassociatie
elastoplasticityC Int. J. 4olids 4tructures7 #8R#S :$;:/#$=7 $;;$C
2C )i!oni7 2C .accariaC Loss o@ stron! ellipticity in non/associatie elastoplasticityC J.
3ec-. L->s. 4olids7 H& :$=$=/$==$7 $;;#aC
2C )i!oni7 2C .accariaC Stron! ellipticity o@ comparison solids in elastoplasticity Uit"
olumetric non/associatiityC Int. J. 4olids 4truct.7 #; :#$#=/#$=F7 $;;#bC
2C )i!oni7 (C +etryIC A note on dier!ence and @lutter instabilities in elastic plastic
materialsC Int. J. 4olids 4tructures7 =;RHS :;$$/;#F7 #&&#C
', )or%a7 5M Sama7 +F San3C On t"e numerical inte!ration o@ t"ree/ineriant
elastoplastic constitutie modelsC +omput. 3et-. /ppl. 3ec-. Cngrg7
=$R$S :$::/$;$7 #&&=C
GC )orr7 GC MaierC On linear ersus non linear @loU rules in strain locali3ation
analysisC 3eccanica7 #H :=F/H$7 $;8;C
2C )ranc"erieC 3od$les continus et discrets pour les probl$mes de localisation et de
rupture fragile etFou ductileC T"4se de doctorat7 Jcole *ormale Suprieure de
Cac"an7 $8& pa!es7 #&&=C
2C Caillerie7 'C C"ambonC -xistence and uniqueness @or boundary alue problems
inolin! Clo- modelC %ocaliIation and bifurcation t-eor> for soils and roc,sC
,n C"ambon 'C7 2esrues ?C7 1ardoulaIis ,C R-dS7 ACAC )alIema7 'otterdam7
ppC=9/H&7 $;;HC
FC Caletti7 GC Combe7 ?C LanierC -xperimental micromec"anical analysis o@ a #2
!ranular material: relation betUeen structure eolution and loadin! pat"C
3ec-anics of +o-esi5e Drictional 3aterials7 #: $#$/$F=7 $;;:C
)C Cambou7 +/6 (ic"erC Modlisation lastoplastique des sols a #C C"ar!ements
cycliquesC C"apitre H7 Clastoplasticit des sols et des roc-es 3od$les de
comportement des sols et des roc-es 17 +/6 (ic"er et ?/F S"ao7 +aris7
(erm4s Science +ublications7 #&&#C
'C C"ambonC )i@urcation en bande de cisaillement7 une approc"e aec des lois
incrmentalement non linaires7 J. 3c. #-or. /ppl.7 9R#S :#::/#;87 $;8FC
'C C"ambon7 ?C 2esrues7 LC (ammad et 'CC"arlierC Clo-7 a neU rate/type
constitutie model @or Geomaterials t"eoritical basis and implementationC Int.
J. Rum. /nal. 3et-. <eomec-anics7 $8 :#9=/#:87 $;;HC
'C C"ambon7 SC Croc"epeyreC 2ap"nis a neU model @or t"e description o@ post/
locali3ation be"aiour : Application to sandsC 3ec-anics of +o-esi5e.Drictional
3aterials7 =R#S :$#:/$9=7 $;;8C
'C C"ambon7 2C CaillerieC -xistence and uniqueness t"eorems @or boundary alue
problems inolin! incrementally non/linear modelsC Int. J. 4olids 4tructures7
pa!es 9&8;/9&;;7 $;;;C
#8# $& )iblio!rap"ie
'C C"ambon7 SC Croc"epeyre7 ?C 2esruesC Locali3ation criteria @or non/linear
constitutie equations o@ !eomaterialsC 3ec-. +o-es..Drict. MaterC7 9 :F$/8#7
#&&&C
'C C"ambon7 2C Caillerie et TC Matsuc"imaC +lastic continuum Uit" microstructure7
local second !radient t"eories @or !eomaterials : locali3ation studiesC Int. J.
4olids 4truct.7 =8 :89&=/89#:7 #&&$C
'C C"ambon7 ?/C MoulletC Uniqueness studies in boundary alue problems inolin!
some second !radient modelsC +omput. 3et-ods /ppl. 3ec-. Cngrg.7
$;= :#::$/#:;F7 #&&HC
'C C"ambonC Lrobl$mes au9 limites pour des mod$les de comportement
inlasti)ue le cas de la plasticit. Jifurcation et localisation. 4pcificit des
gomatriau9C rapport interne7 #&&HaC
'C C"ambonC Some t"eoritical results about second order UorI7 uniqueness7
existence and controllability independent o@ t"e constitutie equationC J. Cng.
3at-.7 9# :9=/F$7 #&&HbC
FC Collin7 'C C"ambon7 'C C"arlierC A @inite element met"od @or poro mec"anical
modellin! o@ !eotec"nical problems usino! local second !radient modelsC Int.
J. Rumer. 3et-. Cngng7 F9 :$:H;/$::#7 #&&FC
FC Collin7 2C Caillerie7 'C C"ambonC Analytical solutions @or t"e t"icI/Ualled cylinder
problem modeled Uit" an isotropic elastic second !radient constitutie
equationC Int. J. 4olids 4truct.7 HF :=;#:/=;=:7 #&&;C
CC ComiC A non/local model Uit" tension and compression dama!e mec"anismsC
Cur. J. 3ec-. /F4olids7 $ :$/##7 #&&$C
M' CoopC T"e mec"anics o@ uncemented carbonate sandsC <otec-ni)ue7 H&RHS :
F&:/F#F7 $;;&C
SC CoquillayC Lrise en compte de la non linarit du comportement des sols soumis
E de petites dformations pour le calcul des ou5rages gotec-ni)uesC T"4se
de doctorat7 -cole *ationale des +onts et C"ausses7 LC+C7 +aris7 #&&9C
-C Cosserat et FC CosseratC T"orie des corps d@ormablesC %ibrairie 4cientifi)ue /.
:ermann et Dils7 +aris7 $;&;C
SC Costa 2'A!uiarC *umerical modellin! o@ soil/pile axial load trans@er mec"anisms
in !ranular soilsC T"4se de 2octorat7 -cole Centrale +aris RFranceS et
Uniersidade Tecnica de Lisboa R+ortu!alS7 ==; pa!es7 #&&8C
OC CoussyC Loromec-anicsC -dC ?C Liley7 #&&HC
6F 2a@alias7 -+ +opoC A model o@ nonlinearity "ardenin! materials @or complex
loadin!C /cta 3ec-anica7 #$ : $:=/$;#7 $;:9C
6F 2a@alias7 -+ +opoC Cyclic loadin! @or materials Uit" a anis"in! elastic re!ionC
*uclear -n!ineerin! and 2esi!n7 H$R#S :#;=/= $;::C
$& )iblio!rap"ie #8=
6F 2a@alias et L' (errmannC )oundin! sur@ace @ormulation o@ soil plasticityC ,n : 4oil
3ec-anics.#ransient and +>clic %oads7 Liley7 *eU 6orI7 ppC #9=/#8#7 $;8&C
6F 2a@aliasC An anisotropic critical state clay plasticity modelC In +.4.Desai et al.
Lroc. +onstituti5e %aQs for Cngineering 3aterials: #-eor> and /pplications7 $7
pC9$=7 $;8:C
FC 2areC Une loi r"olo!ique incrmentale non linaire pour les solidesC ,n
3ec-anics 2esearc- +ommunications7 :RHS : #&9/#$#7 $;8&
FC 2are7 -C Flai!ny et MC Me!ac"ouC 6ield sur@aces and principle o@ superposition
reisited by incrementally non/linear constitutie relationsC Int. J. Llasticit>7
$$R8S:;#:/;H87 $;;9C
FC 2are7 FC Laoua@aC +lane strain instabilities in soil: application to slope stabilityC
Lroc. Sf PII Internat. 4>mp. Sn Rum. 3odels in <eom.7 +ande7 +ietrus3caI7
Sc"Uei!er RedsS7 )alIema7 'otterdam7 ppC89/;&7 $;;;C
FC 2are7 FC Laoua@aC ,nstabilities in !ranular materials and applications to
landslidesC Mec"C Co"esC FricC MaterC7 9R8S :F#:/F9#7 #&&&C
FC 2are7 GC Serant7 FC Laoua@a7 (C 2C 1C 5"oaC Failure in !eomaterials :
Continuous and discrete analysesC +omput. 3et-. /ppl. 3ec-. Cng.7
$;=R#8S :=&9: :=&897 #&&HC
FC 2are7 CC LambertC Continuous and 2icrete Modellin! o@ Failure in
Geomec"anicsC ,n 2e!radations and ,nstabilities in Geomaterials7 olume HF$7
C,SM Courses and Lectures7 Sprin!er/1erla!7 pa!es $;:/#=H7 #&&HC
'C de )orst7 L? SluysC Localisation in a Cosserat continuum under static and
dynamic loadin! conditionsC +omput. 3et-. /ppl. 3ec-. Cngng7 ;& :8&9/8#:7
$;;$C
'C de )orst et () Me"l"ausC Gradient dependent plasticity : @ormulation and
al!orit"mic aspectsC Int. J. Rum. Cngrg.7 =9 :9#$/9H&7 $;;#C
'C de )orst7 L? Sluys7 () Me"l"aus et ?C +aminC Fundamental issues in @inite
element analyses o@ locali3ation o@ de@ormationC Cngrg +omputations7
#R$&S :;;/$#$7 $;;=C
CS 2esaiC A !eneral basis @or yield7 @ailure and potential @unction plasticityC Int. J.
Rum. /nal. 3et-. <eo.7 H : =F$/=:97 $;8&C
CS 2esaiC (ierarc"ical sin!le sur@ace and t"e disturbed state constitutie models
Uit" emp"asys on !eotec"nical applicationsC In 4a9ena T. 2. Cd. <eotc-nical
Cngineering : Cmerging trends in design and practice7 *eU 2el"i7 Ox@ord >
,)( +ublis"in! CoC7 ppC $$9/$9H7 $;;HC
?C 2esruesC La localisation de la d@ormation dans les matriaux !ranulairesC #-$se
$s 4cience7 UCSCMC et ,C*C+C de Grenoble7 $;8HC
?C 2esrues7 'C C"ambonC )i@urcation par localisation de la d@ormation : -tude
exprimentale et t"orique A l'essai biaxial sur sableC ,n %arge Deformation of
#8H $& )iblio!rap"ie
4olids : L->sical Jasis and 3at-ematical 3odelling7 ppC H==/H9;C -lseier7
'otterdam7 $;8FC
?C 2esruesC S"ear )and ,nitiation in Granular Materials : -xperimentation and
T"eoryC ,n <eomaterials : +onstituti5e C)uations and 3odelling7 ppC #8=/=$&C
-lseier7 'otterdam7 $;;&C
?C 2esrues7 MC MoIni et FC Ma3erolleC Tomodensitomtrie et localisation dans les
sablesC Lroceedings 1!
t-
C+43DC DlorenceC )alIema7 'otterdam7 F$/FH7
$;;$C
?C 2esrues7 'C C"ambon7 MC MoIni et FC Ma3erolleC 1oid 'atio -olution ,nside
S"ear bands in Triaxial Sand Specimens Studied by Computed Tomo!rap"yC
<otec-ni)ue H=R=S :9#;/9HF7 $;;FC
?C 2esrues7 GC 1i!!ianiC Strain locali3ation in sand : an oerieU o@ t"e experimental
results obtained in Grenoble usin! stereop"oto!rammetryC Int. J. Rum. /nal.
3et-. <eom.7 #8 : #:;/=#$7 #&&HC
2CCC 2rucIerC A de@inition o@ stable inelastic materialC J. /pplied 3ec-.7 #F :$&$/$8F7
$;9;C
-* 2orIin7 AM CuitiIo et GC GioiaC Finite element Uit" displacement interpolated
embedded locali3ation lines insensitie to mes" si3e and distorsionsC Int. J.
Rum. 3et-. Cngrg7 =& :9H$/9FH7 $;;&C
LC -"lers7 LC 1olIC On t"eoritical and numerical met"ods in t"e t"eory o@ porous
media based on polar and non/polar elasto/plastic solid materialsC Int. J.
4olids 4tructures7 =H/=9 : H9;:/HF$:7 $;;8C
*C -l (assanC 3odlisation t-ori)ue et numri)ue de la localisation de la
dformation dans les gomatriau9C T"4se de doctorat7 Uniersit U?F
Grenoble7 $;;:C
AC -rin!en7 2G) -delenC On nonlocal -lasticityC Int. J. Cngng 4ciC7 $& :#==/#H87
$;:#C
ACC -rin!enC T"eory o@ t"ermo/microstretc" elastic solidsC Int. J. Cngng 4ci.7
$# :$#;$/$=&$7 $;;&C
(L Fan!C A state dependent multi/mec"anism @or sandC <otec-ni)ue7 9=RHS : H&:/
H#&7 #&&=C
'C Fernandes7 CC C"aant7 'C C"ambonC A simpli@ied second !radient model @or
dilatant materials : t"eory and numerical implementationC Int. J. 4olids
4tructures7 H9 :9#8;/9=&:7 #&&8C
'C FernandesC 3odlisation numri)ue ob6ecti5e des probl$mes coupls
->dromcani)ues dans le cas des gomatriau9C T"4se de doctorat7
Uniersit ?osep" Fourier a Grenoble ,7 #&&;aC
'C Fernandes7 CC C"aant7 'C C"ambonC Computation o@ t"e bore"ole stability
problem Uit" a second !radient dilation model7 A paraQtre #&&;bC
$& )iblio!rap"ie #89
?A Fernande3 MerodoC Gne approc-e E la modlisation des glissements et des
effondrements de terrains : initiation et propagationC T"4se de doctoratC -cole
Centrale +aris7 #&&$C
SC Forest et -C Lorent3C Locali3ation and re!ulari3ationC ,n %ocal /pproac- to
fracture7 eds ?C)esson7 +resses de l'-cole des Mines de +aris7 #&&HC
SC Forest et 'C SieertC *onlinear microstrain t"eoriesC Int. J. 4olids 4tructures7
H= ::##H/:#H97 #&&FC
C2 Foster7 'A 'e!ueiro7 AF Fossum7 ', )or%aC ,mplicit numerical inte!ration o@ a
t"ree/inariant7 isotropic<Iinematic "ardenin! cap plasticity model @or
!eomaterialsC +omput. 3et-. /ppl. 3ec-. Cngrg.7 $;H : 9$&;/9$=87 #&&9C
+C GermainC La mt"ode des puissances irtuelles en mcanique des milieux
continusC +remi4re partie : t"orie du second !radientC Journal de 3cani)ue7
$# :#=9/#:H7 $;:=aC
+C GermainC T"e met"od o@ irtual poUer in continuum mec"anicsC +art # :
MicrostructureC 4I/3 J. /ppl. 3at-.7 #9 :99F/9:97 $;:=bC
?C G"aboussi et (C MomemC +lasticity model @or cyclic be"aior o@ sandsC ,n : :P
L-an +4 Desai 4. 4ture JP Lerumpral Cds. Lroc. Sf t-e '
rd
Int +onf. Sn
Rum. 3et-. <eomec-anics7 Aac"en7 'otterdam : )alIema7 ppC H#=/H==7
$;:;C
?C G"aboussi et (C MomemC Modellin! and Analysis o@ cyclic be"aiour o@ sandsC
Soil 3ec-anics = #ransient and +>clic %oads7 edsC G* +ande > OC
.ienIieUic37 ?o"n Liley > Sons Ltd7 ppC =$=/=H#7 $;8#C
'/? GibertC 1ibrations des structuresC +ollection de la direction des tudes et
rec-erc-es d'Clectricit de Drance7 dC -yrolles7 $;88
1C GodardC 3odlisation de l'endommagement anisotrope du bton a5ec prise en
compte de l'effet unilatral : /pplication E la simulation des enceintes de
confinement nuclaires. T"4se de doctorat7 Uniersit +aris F7 #&&9C
?C (adamardC %eUons sur la propagation des ondes et les )uations de
l'->drod>nami)ueC (ermann AC7 +aris7 $;&=C
SC (all7 2M Lood7 -C ,braimC Localised de@ormation patternin! in #2 !ranular
materials reealed by di!ital correlationC <ranular 3atter7 $# :$/$H7 #&$&C
5C (amadiC 3odlisation des bifurcations et des instabilits dans les gomatriau9C
T"4se de doctorat7 Jcole Centrale +aris7 #&&FC
LC (ammadC 3odlisation non linaire et tude e9primentale des bandes de
cisaillement dans les sablesC T"4se de 2octorat7 U?F7 Grenoble7 France7
$;;$C
5C (as"i!uc"iC TUo/ and t"ree/sur@ace models o@ plasticityC Lroc. of 1
t-
Int. +onf. on
Rum. 3et-. In <eomec-anics7 *a!oya7 ppC #89/#;#7 $;89C
#8F $& )iblio!rap"ie
5L (auC /pplication of a t-ree.surface ,inematic -ardening model to repeated
loading of t-inl> surfaced pa5ementsC T"4se de doctorat7 Uniersit de
*ottin!"am7 United 5in!dom7 #&&=C
'C (illC A !eneral t"eory o@ uniqueness and stability in elastic/plastic solidsC J. 3ec-.
L->s. 4olids7 F :#=F/#FH7 $;98C
'C (illC Acceleration Uaes in solidsC J. 3ec-. L->s. 4olids7 $& :$/$F7 $;F#C
'C (ill7 ?L (utc"insonC )i@urcation p"enomena in t"e plane tension testC J. 3ec-.
L->s. 4olidsC7 #= :#=;/#FH7 $;:9C
'C (illC Aspect o@ inariance in solidsC ,n /d5ances in /pplied 3ec-anics7 $8 :$/:97
*eU 6orI7 Academic +ress7 $;:8C
?C (uan!7 21 Gri@@it"sC 'eturn Mappin! Al!orit"ms and Stress +redictors @or Failure
Analysis in Geomec"anicsC ?C o@ -n!ineerin! Mec"anics7 $=9RHS : #:F/#8H7
#&&;C
TC (uecIel7 GC MaierC ,ncremental boundary alue problems in t"e presence o@
couplin! o@ elastic and plastic de@ormations : a rocI mec"anics oriented
t"eoryC Int. J. 4olids. 4tructures7 $= :$/$97 $;::C
T?' (u!"esC *umerical ,mplemantation o@ constitutie models : rate/independent
deiatoric plasticityC ,* : SC *emat/*asser7 '? Asaro and GA (e!eimer7
-ditors7 #-eoritical Doundation for %arge 4cale +omputations for Ronlinear
3aterial Je-a5ior7 Martinus *i%"o@@ +ublis"ers7 $;8=C
?C (u%euxC +alcul numri)ue de probl$mes de consolidation lastoplasti)uesC
T"4se de doctorat7 -cole Centrale +aris7 $;:;C
?CC (u%euxC Une loi de comportement pour le c"ar!ement cyclique des solsC ,n : P.
Da5ido5ici Cditor <nie Larasismi)ue7 +resses -*+C7 France7 ppC #:8/=
$;89C
SC ,mposimato7 'C *oaC On alue o@ t"e second order UorI in "omo!eneous test on
loose sand specimensC ,n Mu"l"aus et alC -ditor7 Jifurcation and %ocalisation
#-eor> in <eomec-anics7 pa!es #&;/#$F7 .Uets and .eitlin!er7 #&&$C
2L ,UanC On a class o@ models @or t"e yieldin! be"aiour o@ continuous and
composite systemsC J. /ppl. 3ec-.7 ASM-7 =H : F$#/F$:7 $;F:C
C+ ?eannerodC Dormes normales de perturbations de matrices : tude et calcul
e9actC T"4se de doctorat7 ,*+G7 #&&&C
OC ?encIC %e renforcement des sols compressibles par inclusions rigides 5erticales.
3odlisation p->si)ue et numri)ueC T"4se de doctorat7 ,*SA Lyon7 #&&9C
)C ?eremijC Line searc" tec"niques @or elasto/plastic @inite element computations in
!eomec"anicsC +ommun. Rumer. 3et-ods Cng.7 $:R#S :$$9/$#97 #&&$C
)C ?eremij7 .C 6an!7 .C C"en!7 GC ?ie7 5C Sett7 MC Taeibat7 MC +reisi!7 *C Ta@a33oliC
$& )iblio!rap"ie #8:
%ecture Rotes on +omputational <eomec-anics : Inelastic Dinite Clements for
Lressure 4ensiti5e 3aterialsC 2eptC Ciil and -nC -n!r!7 Uniersit de
Cali@ornie7 2ais7 #&&;C
MC ?ircseIC Comparatie study on @inite elements Uit" embedded discontinuitiesC
+omput. 3et-. /ppl. 3ec-. Cngrg.7 $88 :=&:/==&7 #&&&C
MC ?ircseIC Jasic concepts and e)uations of solids mec-anicsC N 2ama!e and
Fracture in !eomaterials O7 Alert 2octoral Sc"ool7 Aussois7 France7 #&&:C
1* 5aliaIin et 6F 2a@aliasC T"eoritical aspects o@ t"e elastoplastic/iscoplastic
boundin! sur@ace model @or co"esie soilsC 4oils and Doundations7 =&R=S :$$/
#H7 $;;&C
AC 5attanC Dluage et consolidation des sols saturs et )uasi.saturs. Analyse
*umriqueC T"4se de doctorat7 Jcole *ationale des +onts et C"ausses7
+aris7 $;;&C
MC 5"amC +ro%et CO2(6)A'# : Mt"odolo!ie de modlisation numrique de la
contruction par couc"es et la mise en eau d'une di!ue en terre aec la loi
lasto/plastique de (u%euxC Rote interne CDD 2VD :#B2.2!!".!'.211D27
#&&;C
A' 5"oei7 A' A3ami et SM (aeriC ,mplementation o@ plasticity based models in
dynamic analysis o@ eart" and rocI@ill dams : A comparison o@ +astor/
.ienIieUic3 and cap/modelsC +omput. <eotec-nics7 =$ : =89/H$&7 #&&HC
MC 5lisinsIi7 5C 'unesson et SC StureC Finite element Uit" inner so@tenin! bandC J.
Cng. 3ec-.7 $$:R=S :9:9/98:7 $;;$C
?C 5oiterC General t"eorems @or elastoplastic solidsC Lrogress in 4olid 3ec-anics7
*ort"/(olland +ubC7 $ : $F9/##$7 $;F&C
2C 5olymbasC An outline o@ "ypoplasticityC /rc-i5e of /pplied 3ec-anics7 F$ :$H=/
$9$7 $;;$C
MC 5ord%aniC Caractrisation et modlisation du comportement en petites
d@ormations des sols sur des c"emins de sollicitation monotone et cycliqueC
T"4se de doctorat7 -cole Centrale +aris7 C"Etenay/Malabry7 France7 $;;9C
'2 5rie!7 2) 5rie!C Accuracies o@ numerical solution met"ods @or t"e elastic/
per@ectly plastic modelC /43C J. Lressure Pessel #ec-nol.7 ;;RHS :9$&/9$97
$;::C
-C 5rgnerC -lasticity T"eory o@ Materials Uit" Lon!ran!e Co"esie ForcesC Int. J.
4olids 4truct.7 = ::=$/:H#7 $;F8C
?A 5rum"anslC Some considerations o@ t"e relations betUeen solid state p"ysics and
!enerali3ed continuum mec"anicsC ,n -C 5roner7 editor7 3ec-anics of
<eneraliIed +ontinua7 pa!es #;8/=$$7 )erlin7 $;F8C Sprin!er 1erla!C
,A 5uninC T"e t"eory o@ -lastic Media Uit" Microstructure and t"e T"eory o@
2islocationsC 3ec-anics of <eneraliIed +ontinua7 edC -C5rgner7 Sprin!er/
#88 $& )iblio!rap"ie
1erla!7 (eidelber!7 Germany7 pa!es =#$/=#87 $;F8C
+1 LadeC -lastoplastic stress/strain t"eory @or co"esionless soil Uit" cured yield
sur@aceC Int. J. 4olids 4truct.7 $=R:S : $&$;/$&=97 $;::C
LC LalouiC 3odlisation du comportement t-ermo.->dro.mcani)ue des milieu9
poreu9 anlasti)uesC T"4se de doctorat7 Jcole Centrale +aris7 $;;9C
'5 Larrson7 5C 'unesson et *S OttossonC 2iscontinuous displacement
approximation @or capturin! plastic locali3ationC ,ntC ?C *umC Mec"C -n!n!7
=F :#&8:/#$&97 $;;=C
?C LaerneC Dormulation nergti)ue de la rupture par des mod$les de forces
co-si5es : considrations t-ori)ues et implantations numri)uesC T"4se de
doctorat7 Uniersit +aris $=7 #&&HC
6L LeeC Lrise en compte des non linarits de comportement des sols et des
roc-es dans la modlisation du creusement d'un tunnelC T"4se de doctorat7
Jcole *ationale des +onts et C"ausses7 $;;HC
,C Lepidas et ?+ Ma!nanC Dluage et consolidation des sols argilau9 : modlisation
numri)ueC Laboratoire Central des +onts et C"ausses7 'apport de
'ec"erc"e L+C nk$9:7 $;;&C
6C Leroy7 AC *eedlmean et MC Orti3C An oerieU o@ @inite element met"ods @or t"e
analysis o@ strain locali3ationC ComputC Met"C ApplC Mec"C -n!r!C7 F$ :$8;/#$H7
$;8:C
FC Lope3/CaballeroC Influence du comportement non linaire du sol sur les
mou5ments sismi)ues induits dans des go.structuresC T"4se de doctorat7
Jcole Centrale +aris7 #&&=aC
FC Lope3/Caballero7 ACModaressi7 FC-lmiC ,denti@ication o@ an elasto/plastic model
parameters usin! laboratory and in situ testsC ,n 2i )enedetto et alC7 editor7
Deformation +-aracteristics of <eomatrials I4 %>on7 ppC $$8=/$$;&C )alIema7
#&&=bC
FC Lope3/Caballero7 AC Modaressi Fara"mand/'a3aiC #ests de construction par
couc-es d'un sol bi.p-asi)ue saturC "ttp :<<UUUCmssmatCecpC@r<Tests/de/
construction/par/couc"es7##;$7 #&&FaC
FC Lope3/Caballero7 AC Modaressi Fara"mand/'a3aiC #ests de propagation des
ondes 1DC "ttp :<<UUUCmssmatCecpC@r<Tests/de/propa!ation/des/ondes/
$27#H:&7 #&&FbC
FC Lope3/Caballero7 AC Modaressi Fara"mand/'a3ai7 (C ModaressiC *on linear
numerical met"od @or eart"quaIe site response analysis ,/ elastoplastic cyclic
model > parameter identi@ication strate!yC Julletin of Cart-)ua,e Cngineering7
9R=S :=&=/=#=7 #&&:C
-C Lorent3C 3odlisations oprationnelles de l'endommagementC (,/:H<;F<&$#<&7
note interne -2F '>27 $;;FC
$& )iblio!rap"ie #8;
-C Lorent3C %ois de comportement E gradients de 5ariables internes : +onstruction
formulation 5ariationnelle et mise en Wu5re numri)ueC T"4se de doctorat7
-*S Cac"an7 $;;;C
-C Lorent37 +C )adelC A neU pat"/@olloUin! constraint @or strain/so@tenin! @inite
element simulationsC Int. J. Rum. 3et-. Cngrg7 F& :H;;/9#F7 #&&HC
-C Lorent37 AC )enallalC Gradient constitutie relations : numerical aspects and
application to !radient dama!eC +omput. 3et-. /ppl. 3ec-. Cngrg.7
$;H :9$;$/9##&7 #&&9C
-C Lorent3C 3odlisation et simulation numri)ue de l'endommagement des
structuresC (abilitation A 2iri!er des 'ec"erc"es7 Uniersit +aris F7 #&&8C
)C Loret et ?C +rostC 2ynamic strain locali3ation in elasto/RiscoS/plastic solidsC ,/
General @ormulation and one/dimensional exampleC +omp. 3et-. /ppl. 3ec-.
Cngng7 8= :#H:/#:=7 $;;&C
M+ Luon!C +"nom4nes cycliques dans les sols pulrulentsC 'eue Fran0aise de
Gnie Gotec"nique7 $&R$S : =;/9=7 $;8&C
AM LyapunoC +robl4me !nral de la stabilit des mouementsC /nnales de la
facult des sciences de #oulouse7 ; :#&=/#:H7 $;&:C Traduit en @ran0ais du
texte ori!inal7 5"arIo7 $8;#C
GC MaierC A minimum principle @or incremental elastoplasticity Uit" non/associated
@loU laUsC J. 3ec-. L->s. 4olids7 $8R9S:=$;/==&7 $;:&
GC Maier7 TC (uecIelC *onassociated and coupled @loU rules o@ elastoplasticity @or
rocI/liIe materialsC Int. J. 2oc, 3ec-. 3in. 4ci.7 $F :::/;#7 $;:;C
MC MaleIiC 3odlisation -irarc-ise du comportement des solsC T"4se de doctorat7
Jcole Centrale de Lyon7 $;;8C
?C MandelC Conditions de stabilit et postulat de 2rucIerC Lroceedings of IG/#3
4>mposium on 2-eolog> and 4oil 3ec-anics7 98/F87 $;FHC
?C MandelC Gnralisation de la t"orie de la plasticit de LCTC 5oiterC Int. J. 4olids
4truct.7 $ : #:=/#;97 $;F9C
MT Man3ari et 6F 2a@aliasC A critical state tUo/sur@ace plasticity model @or sandsC
Gotec"nique7 H:R#S : #99/#:#7 $;;:C
MT Man3ari7 MA *ourC On implicit inte!ration o@ boundin! sur@ace plasticity modelsC
+omputer and 4tructures7 F=R=S :=89/=;97 $;;:C
MT Man3ari7 'C +rac"at"ananuIitC On inte!ration o@ a cyclic soil plasticity modelC Int.
J. Rum. /nal. 3et-. <eomec-.7 #9 :9#9/9H;7 #&&$C
TC Matsus"ima7 'C C"ambon7 2C CaillerieC Lar!e strain @inite element analysis o@
local second !radient models7 application to locali3ationC Int. J. Rum. 3et-.
Cngng7 9H :H;;/9#$7 #&&#C
#;& $& )iblio!rap"ie
+C MestatC Modlisation lastoplastique des sols a $C C"ar!ements monotonesC
C"apitre =7 Clastoplasticit des sols et des roc-es 3od$les de comportement
des sols et des roc-es 17 +/6 (ic"er et ?/F S"ao7 +aris7 (erm4s Science
+ublications7 #&&#C
'2 MindlinC Microstructure in linear elasticityC /rc-i5e for 2ational 3ec-anics and
/nal>sis7 $F :9$/:87 $;FHC
'2 MindlinC Second !radient o@ strain and sur@ace/tension in linear elasticityC Int. J.
4olids 4tructures7 $ :H$:/:=87 $;F9C
AC Modaressi7 (C ModaressiC T"ermoplastic constitutie model @or unsaturated soils [
1alidation on a silty materialC Lroceedings of Rumerical 3odels in
<eomec-anics RG3S< P7 olC $7 'otterdam7 )alIema7 pC H9/9&7 $;;9
AC Modaressi7 SC )ou@ellou"7 +C -esqueC Modelin! o@ stress distribution in !ranular
piles : Comparison Uit" centri@u!e experimentsC +-aos7 olC ;R=S :9#=/9H=7
$;;;C
AC ModaressiC Modlisation des milieux poreux sous c"ar!ements complexesC
2ossier d'(abilitation A 2iri!er des 'ec"erc"es7 ,*+G7 #&&=C
(C ModaressiC 3odlisation numri)ue de la propagation des ondes dans les
milieu9 poreu9 anlasti)uesC T"4se de doctorat7 Jcole Centrale +aris7 France7
$;8:C
(C Modaressi7 2C AubryC *umerical modellin! @or t"e @loU o@ compressible @luids in
systems o@ de@ormable rocIsC Lroceedings of Rumerical 3odels in
<eomec-anics RG3S< III7 *ia!ara Falls7 nk=;$/=;87 London and *eU 6orI7
-lseier Applied Science7 $;8;C
(C Modaressi7 LC Laloui7 2C AubryC T"ermodynamical approac" @or Camclay/@amily
models Uit 'oscoe type dilatanct rulesC Int. J. Rum. /nal. 3et-. <eom.7 $8 :
$==/$=87 $;;HC
(C Modaressi7 LC LalouiC A t"ermoiscoplastic constitutie model @or claysC Int. J.
Rum. /nal. 3et-. <eom.7 #$ : =$=/==97 $;;:C
MC MoIniC 2elations entre dformations en masse et dformations localises dans
les matriau9 granulairesC T"4se de doctorat7 U?F7 Grenoble7 France7 $;;#C
F? Montcns7 ', )or%aC ,mplicit ?#/boundin! sur@ace plasticity usin! +ra!er's
translation ruleC Int. J. Rumer. 3et-. Cngrg.7 99 :$$#;/$$FF7 #&&#C
AC Mouratidis et ?+ Ma!nanC Mod4le lastoplastique anisotrope aec crouissa!e
pour le calcul des oura!es sur sols compressiblesC Laboratoire Central des
+onts et C"ausses7 +aris7 'apport de rec"erc"e L+C7 nk$#$7 $;8=C
?? MoreauC On unilateral constraints7 @riction and plasticityC ReQ 5ariational
tec-ni)ues in mat-ematical p->sics RCentro ,nterna3C MatC -stio RCC,CMC-CS7 ,,
Ciclo7 )ressanone7 $;:=S7 ppC $:$/=##7 -dC Cremonese7 'ome7 $;:HC
.C Mr\3C *on associated @loU laUs in plasticityC Journal de 3cani)ue7 #R$S :#$/H#7
$& )iblio!rap"ie #;$
$;F=C
.C Mr\3C On t"e description o@ anisotropic "ardenin!C ?C Mec"C +"ysC Solids7 $9 :
$F=/$:97 $;F:C
.C Mr\37 1A *orris et OC .ienIieUic3C Application o@ an anisotropic "ardenin! model
in t"e analysis o@ elasto/plastic de@ormation o@ soilsC Gotec"nique7 #;R$S : $/
=:7 $;:;C
() Me"l"aus7 ,C 1ardoulaIisC T"e t"icIness o@ s"ear band in !ranular materialsC
Gotec"nique7 =: :#:$/#8=7 $;8:C
() Me"l"aus et -C Ai@antisC A ariational principle @or !radient plasticityC Int. J.
4olids 4truct.7 #8 :8H9/89:7 $;;$C
AC *eedleman et 1C Ter!aardC Finite -lement Analysis o@ Localisation in +lasticityC
,n ?C Oden and GC Carey R-dsS7 Dinite Clements = 4pecial Lroblems in 4olids
3ec-anics7 1olume 17 ppC;H/$9:C +rentice (all ,nc7 $;8HC
AC *eedlemanC Material rate dependence and mes" sensitiity in locali3ation
problemsC +omput. 3et-. /ppl. 3ec-. Cngrg7 F: :F;/897 $;88C
M5 *eilsen7 (L Sc"reyerC )i@urcations in elastic/plastic materialsC Int. J. 4olids
4truct.7 =& :9#$/9HH7 $;;=C
]CSC *!uyenC Stabilit et Mcanique et non linaireC :erm$s #&&&C
AC *iemunisC C9tended ->poplastic models for soilsC (abilitation 2issertation7
)oc"um7 #&&#C
FC *icotC +riate communication7 #&&8C
FC *icot7 FC 2areC A multi/scale approac" to !ranular materialsC 3ec-anics of
3aterial7 =: :;8&/$&&F7 #&&9C
'C *oaC A model o@ soil be"aiour in plastic and "ysteretic ran!esC Int. Xor,s-op
on +onstituti5e Je-a5iour of soils7 Grenoble7 eds )alIema7 ppC#8;/=&;7 $;8#C
'C *oaC Controllability o@ t"e incremental response o@ soil specimens sub%ected to
arbitrary loadin! pro!rammesC J. 3ec-. Je-a5. 3ater.7 9R#S :$;=/#&$7 $;;HC
'C *oaC T"e role o@ non/normality in soil mec"anics and some o@ its mat"ematical
consequencesC +omput. <eotec-.7 =$ :$89/$;$7 #&&HC
?C Olier7 A- (uespe7 ?C CanteC An implicit<explicit inte!ration sc"eme to increase
computability o@ non/linear material and contact<@riction problemsC +omput.
3et-ods /ppl. 3ec-. Cngrg7 $;: : $8F9/$88;7 #&&8C
MC Orti37 -+ +opoC Accuracy and stability o@ inte!ration al!orit"ms @or elastoplastic
constitutie relationsC Int. J. Rumer. 3et-. Cngrg7 #$R;S :$9F$/$9:F7 $;89C
MC Orti37 ?C SimoC An analysis o@ a neU class o@ inte!ration al!orit"ms @or
elastoplastic constitutie relationsC Int. J. Rum. 3et-. Cngrg.7 #= :=9=/=FF7
#;# $& )iblio!rap"ie
$;8FC
MC Orti37 6C Leroy et AC *eedlemanC A @inite element met"od @or locali3ed @ailure
analysisC +omput. 3et-. /ppl. 3ec-. Cngrg.7 F$ :$8;/#$H7 $;8:C
AC OstroUsIi7 OC TaussIyC On t"e ariation o@ t"e determinant o@ a positie de@inite
matrixC Indagationes 3at-.7 A9H :=8=/=897 $;9$
*CSC Ottosen7 5C 'unessonC +roperties o@ discontinuous bi@urcation solutions in
elasto/plasticityC Int. J. 4olids 4truct.7 #:RHS :H&$/H#$7 $;;$aC
*S Ottosen7 5C 'unessonC 2iscontinuous bi@urcations in a non/associated Mo"r
materialC 3ec-. 3ater.7 $#R=/HS :#99/#F97 $;;$bC
MC +astor7 OC .ienIieUic3 et 5( Leun!C Simple model @or transient soil loadin! in
eart"quaIe analysis : ,,C *on associatie models @or sandsC Int. J. Rum. /nal.
3et-. <eomec-.7 ; :H::/H;87 $;89C
MC +astor7 OC .ienIieUic3C A !enerali3ed plasticity "ierarc"ical model @or sand
under monotonic and cyclic loadin!C Lroc. 2
nd
Int. +onf. Sn Rumerical 3odels
in <eomec-anics7 G"ent R)el!iqueS7 =$ Mars/H Aril7 G* +ande et LF 1an
,mpe RedsS7 MC ?acIson and Son +ubC7 ppC $=$/$9&7 $;8FC
MC +astor7 OC .ienIieUic3 et A(C C"anC A !enerali3ed plasticity continuous loadin!
model @or !eomaterialsC ,n Lroc. Int. +onf. Rum. 3et-. In Cngineering #-eor>
and /pplication7 *UM-TA '8:7 SUansea7 GC*C +ande et ?C Middleton RedsS7
Martinus *i!"o@@ +ubC7 ppC C=$<$/$&7 $;8:C
MC +astor7 OC .ienIieUic3 et A(C C"anC Generali3ed plasticity modellin! soil
be"aiourC Int. J. Rum. /nal. 3et-. In <eomec-.7 $HR=S :$9$/$;&7 $;;&C
GC +errin7 ?C )C LeblondC 'udnicIi and 'ice's analysis o@ strain locali3ation reisitedC
J. /ppl. 3ec-.7 F&RHS :8H#/8HF7 $;;=C
'(? +eerlin!s7 'C 2e )orst7 LAM )reIelmans et ?(+ de 1reeC Gradient en"anced
dama!e @or quasi/brittle materialsC Int. J. Rum. 3et-. Cngrg7 =; :==;$/=H&=7
$;;FC
'(? +eerlin!s7 MG2 Geers7 'C 2e )orst et LAM )reIelmansC A critical comparison
o@ nonlocal and !radient/en"anced so@tenin! continuaC Int. J. 4olids 4truct.7
=8 :::#=/::HF7 #&&$C
(C +etryIC #-eor> of material instabilit> in incrementall> non.linear plasticit>C C,SM
Material instabilities in elastic and plastic solids7 +etryI edC7 H$H :#F$/==$7
Sprin!er7 $;;;C
-C +iccue33uC Lois de comportement en !omcaniqueC Modlisation7 mise en
oeure7 identi@icationC T"4se de 2octoratC -cole Centrale +aris7 Laboratoire
MSSMat7 $:&pa!es7 $;;$C
SC +ietrus3acI et .C Mr\3C Finite element analysis o@ de@ormation o@ strain so@tenin!
materialsC Int. J. Rum. 3et-. Cngrg.7 $: :=#:/==H7 $;8$C
$& )iblio!rap"ie #;=
GC +i%audier/Cabot et .C )afantC *onlocal 2ama!e T"eoryC J. Cngng 3ec-.7 ASC-7
$$=R$&S :$9$#/$9==7 $;8:C
-) +itmanC 1isco/plastic relaxation : coner!ence and locali3ationC -urC ?C Mec"C7 A<
Solids7 $HRFS :;F$/;:;7 $;;9C
?C +lanas7 MC -lices7 G1 GuineaC Co"esie cracIs as a solution o@ a class o@
nonlocal modelsC Fracture 2ama!e ]uasibrittle Structure7 ,S)* &/H$;/
$;#8&87 $;;HC
2C +radel7 5C ,s"i"ara7 MC Gutierre3C 6ieldin! and @loU o@ sand under principal stress
axes rotationC 4oils and Doundations7 =&R$S : 8:/;;7 $;;&C
?( +rostC Mat"ematical modellin! o@ monotonic and cyclic undrained clay
be"aiourC Int. J. Rum. /nal. 3et-. <eomec-anics7 $ : $;9/#$F7 $;::C
?( +rostC Anisotropic undrained stress/strain be"aiour o@ claysC J. <eotec-.
Cngrg Di5ision7 ASC-7 $&H : $&:9/$&;&7 $;:8C
?( +rost et )C LoretC 2ynamic strain locali3ation in elasto/RiscoS/plastic solidsC ,,/
+lane strain examplesC +omp. 3et-. /ppl. 3ec-. Cngng7 8= :#:9/#;H7 $;;&C
?( +rost et CM 5eaneC Multimec"anism elasto/plastic model @or soilsC Journal of
Cngineering 3ec-anics7 olC $$FR;S :$;#H/$;HH7 $;;&C
FC +runierC 3odlisation des instabilits en gomcani)ue application au9
glissement de terrainsC T"4se de doctorat7 ,*+G7 Laboratoire Sols7 Solides7
Structures a 'isques7 #&&8C
^'9C&$C&$_C 4ol5eurs modau9 et rsolution du probl$me gnralis (<CL)C
2ocumentation ersion $&7 CodeTAster7 UUUCcode/asterCor!
^'=C&=C&$_C Dualisation des conditions au9 limitesC 2ocumentation ersion $&7
CodeTAster7 UUUCcode/asterCor!
^'9C&=C&$_ /lgorit-me non linaire )uasi.stati)ue (oprateur 4#/#;RSR;%IRC)C
2ocumentation ersion $&7 CodeTAster7 UUUCcode/asterCor!
^'9C&=C8&_ 3t-odes de pilotage du c-argementC 2ocumentation ersion $&7
CodeTAster7 UUUCcode/asterCor!
^'9C&HC&$_C 3odlisation non locale E gradient de 5ariables internesC 2ocumentation
ersion $&7 CodeTAster7 UUUCcode/asterCor!C
^'9C&HC&#_C 3odlisation non locale E gradient de dformationC 2ocumentation
ersion $&7 CodeTAster7 UUUCcode/asterCor!
^'9C&HC&=_C 3odlisation second gradientC 2ocumentation ersion $&7 CodeTAster7
UUUCcode/ asterCor!
^':C&$C$H_C %oi de comportement +/3.+%/YC 2ocumentation ersion $&7
CodeTAster7 UUUCcode/ asterCor!
#;H $& )iblio!rap"ie
^':C&$C#=_C %oi de comportement c>cli)ue de :u6eu9 pour les solsC 2ocumentation
ersion $&7 CodeTAster7 UUUCcode/ asterCor!
)C 'aniecIiC Uniqueness criteria in solids Uit" non/associated plastic @loU laUs at
@inite de@ormationsC Jull. /cad. Lolon. 4ci.7 dd1,,7 =;$/=;;7 $;:;C
)C 'aniecIi7 OT )ru"nsC )ounds to bi@urcation stresses in soids Uit" non/associated
plastic @loU laU at @inite strainC J. 3ec-. L->s. 4olids7 #;:$9=/$:$7 $;8$C
'C 'e!ueiro7 TC Lai7 'C )or%aC Computational Modelin! o@ Strain Locali3ation in So@t
'ocIC In C5angelista and Licarelli(Cds.) #-e <eotec-nics of :ard 4oils = 4oft
2oc,s7 )alIema7 'otterdam7 pa!es :8;/:;:7 $;;8C
?' 'iceC T"e locali3ation o@ plastic de@ormationC #-eoritical and applied mec-anics
X.#. Toiter ed. *ort"/(olland publis"in! CompanyR8S :#&:/##&7 $;:FC
?' 'iceC #-e localiIation of plastic deformationC 5oiter7 LCTC R-dCS7 T"eoritical and
Applied Mec"anicsC *ort"/(olland7 Amsterdam7 ppC #&:/##&7 $;::C
?' 'ice7 ?L 'udnicIiC A note on @eatures o@ t"e t"eory o@ t"e locali3ation o@
de@ormationC /Int. J. 4olids 4tructures7 $FR#S :9;:/F&97 $;8&C
-C 'i33y7 GC Maier7 5C LilliamC On @ailure indicators in multidissipatie materialsC Int.
J. 4olids 4truct. == :=$8:/=#$H7 $;;FC
MC 'ouainia7 2C Muir LoodC ,mplicit numerical inte!ration @or a Iinematic "ardenin!
soil plasticity modelC Int. J. Rumer. /nal. 3et-. <eomec-.7 #9 :$=&9/$=#97
#&&$C
5( 'oscoe7 A* Sc"o@ield7 C+ Lrot"C On t"e yieldin! o@ soilsC <otec-ni)ue7 8R$S :
##/9=7 $;98C
5( 'oscoe et ?) )urlandC On t"e !eneralised stress/strain be"aiour o@ 'Uet' clayC
,n Cngineering Llasticit>7 edsC ?C (eyman > FA LecIie7 ppC9=9/F&;7 $;F8C
5( 'oscoeC T"e in@luence o@ strains in soil mec"anicsC <otec-ni)ue7 #& :$#;/$:&7
$;:&C
MC 'oseauC Pibrations des s>st$mes mcani)ues 3t-odes anal>ti)ues et
applicationsC -diteur Masson7 H88 pa!es7 $;8HC
?C 'osenber!7 'C CimrmanC Microcontinuum approac" in biomec"anical modelin!C
3at-ematics and +omputers in 4imulation7 F$ :#H;/#F&7 #&&=C
+L 'oUeC T"e stress dilatancy relation @or static equilibrium o@ an assembly o@
particles in contactC ,n Lroc. 2o>. 4oc. %ondon /2B"7 London7 ppC 9&&/9#:7
$;F#C
?L 'udnicIi7 ?C'C 'iceC Conditions @or t"e locali3ation o@ de@ormation in pressure
sensitie dilatant materialsC J. 3ec-. L->s. 4olids7 #= :=:$/=;H7 $;:9C
5C 'unesson7 *S Ottosen7 2C +ericC 2iscontinuous bi@urcations o@ elastic plastic
solutions in plane stress and plane strainC Int. J. Llasticit>7 : :;;/$#$7 $;;$C
$& )iblio!rap"ie #;9
GC Scarpelli et 2M LoodC -xperimental obserations o@ s"ear band patterns in
direct s"ear testsC Deformation and Dailure of <ranular 3aterials7 )alIema7
H:=/H8H7 $;8#C
GC Serant7 FC 2are7 ?C 2esrues and ,O Geor!opoulosC 2i@@use modes o@ @ailure in
!eomaterialsC ,n 2i)enedetto7 editor7 Deformation c-aracteristics of
<eomaterials I4 %>on7 pa!es $$8=/$$;&7 France7 )alIema7 #&&=C
6C Sie@@ert7 SC Al (olo7 'C C"ambonC Loss o@ uniqueness o@ numerical solutions o@ t"e
bore"ole problem modelled Uit" en"anced mediaC Int. J. 4olids 4truct.7
HF :=$:=/=$;:7 #&&;C
?C Simo7 MC Orti3C A Uni@ied Approac" to Finite 2e@ormation -lastoplastic Analysis
)ased on t"e Use o@ (yperelastic Constitutie -quationsC CMAM-7 H;R#S:##$/
#H97 $;89C
?C Simo7 'L TaylorC Consistent tan!ent operators @or rate/independent
elastoplasticityC +omput. 3et-. /ppl. 3ec-. Cngrg7 H8 :$&$/$$87 $;89C
?C SimoC Strain so@tenin! and dissipation : a uni@ication o@ approac"esC ,n )afant >
Ma3ars7 CracIin! and 2ama!e7 -lseier applied science7 pa!es HH&/HF$7
$;88
?C Simo7 ?G 5ennedy et SC Goind%eC *on/smoot" multisur@ace plasticity and
iscoplasticityC Loadin!<unloadin! conditions and numerical al!orit"msC Int. J.
Rum. 3et-. Cngrg7 #F :#$F$/#$897 $;88C
?C Simo7 ?C Olier et FC ArmeroC An analysis o@ stron! discontinuity induced by strain
so@tenin! solutions in rate/independent solidsC J. +omput. 3ec-.7 $# :#::/#;F7
$;;=C
?C Simo7 T?' (u!"esC Computational inelasticityC ,nterdisciplinary Applied
Mat"ematics7 Mec"anics and Materials7 :7 Sprin!er 1erla! *eU 6orI ,ncC7
H$# pa!es7 #&&&C
L? Sluys7 'C 2e )orst7 () Me"l"ausC Lae propa!ation7 locali3ation and dispersion
in a !radient/dependent mediumC ,ntC ?C Solids StructC7 =& : $$9=/$$:$7 $;;=C
L? SluysC 2iscontinuous modellin! o@ s"ear bandin!C ,n 2C'C?C OUen7 -C Olate et -C
(inton7 editors7 +omputational plasticit> P. Dundammentals and /pplications7
pa!es ;9:/;FH7 )arcelona7 $;;:C
S- StallebrassC #-e effect of recent stress -istor> on t-e deformation of
o5erconsolidated soilsC T"4se de doctorat7 Uniersit de City7 United 5in!dom7
$;;&C
LC Strgmber! et MC 'istinmaaC F-/@ormulation o@ a nonlocal plasticity t"eoryC CompC
Met"C ApplC Mec"C -n!n!7 $=F :$#:/$HH7 $;;FC
LC S3ab\C S"ear band @ormulations in @inite strain elastoplasticityC Int. J. 4olids
4tructC7 =$ :$#;$/$=&87 $;;HC
#;F $& )iblio!rap"ie
LC S3ab\C On t"e ei!enalues o@ t"e @ourt"/order constitutie tensor and loss o@
stron! ellipticity in elastoplasticityC Int. J. Llasticit>7 $= :8&; :8=97 $;;:C
LC S3ab\C Comments on loss o@ stron! elliptitcity in elastoplasticityC Int. J. 4olids
4truct.7 =: :=::9/=8&F7 $;;;C
CC Tama!nini7 GC 1i!!iani7 'C C"ambon et ?C 2esruesC -aluation o@ di@@erent
strate!ies @or t"e inte!ration o@ "ypoplastic constitutie equations : Application
to t"e Clo- modelC 3ec-anics of +o-esi5e.frictional 3aterials7 9RHS :#F=/#8;7
#&&&C
T6 T"omasC +lastic @loU and @racture in solidsC ,n /cademic Lress7 *eU 6orI7 $;F$C
'A ToupinC -lastic materials Uit" couple/stressC /rc-. 2ation. 3ec-. /nal.7 $$ :=89/
H$H7 $;F#C
CC Truesdell7 LC *ollC T"e non linear @ields t"eory o@ mec"anicsC Cnc>clopaedia of
L->sics7 Sprin!er/1erla!7 $;F9C
,C 1ardoulaIisC )erec"nun!ser@a"ren @er erdIgrper mit plastic"er er/ und
ent@esti!un!7 entse"un!7 und ausbreitun! on s"er@un!enC DD< report <G7
$&=<$F7 $;:HC
,C 1ardoulaIis7 MC Golds"eider7 GC Gude"usC Formation o@ s"ear bands in sand
bodies as a bi@urcation problemC Int. J. Rum. /nal. 3et-. <eom.7 #R#S :;;/$#87
$;:8C
,C 1ardoulaIisC )i@urcation Analysis o@ t"e Triaxial Test in Sand SamplesC ,n /cta
3ec-anica7 1olume =#7 pp =9/9H7 $;:;C
,C 1ardoulaIisC S"ear )and ,nclination and S"ear Modulus o@ Sand in )iaxial TestC
Int. J. Rum. /nal. 3et-. in <eomec-anics7 H : =/$$;7 $;8&C
,C 1ardoulaIis et ?C SulemC Jifurcation /nal>sis in <eomec-anicsC London : )lacIie7
$;;9C
5C 1ossou!"iC (tude Rumri)ue du comportement des ou5rages de sout$nement E
la ruptureC T"4se de doctorat7 Jcole Centrale +aris7 Laboratoire Mcanique
des Sols7 Structures et Matriaux7 #&&$C
GL Lat"u!ala7 SC +alC Comparison o@ di@@erent implementation al!orit"ms @or (iSS
constitutie models in F-MC Int. J. 4olids and 4truct.7 =F :H;H$/H;F#7 $;;;C
(S 6uC A uni@ied critical state model @or clay and sandC +i5il Cngineering 2esearc-
2eport nZ112.!0.1""17 Uniersit de *eUcastle7 *SL #=&87 Australie7 $;;9C
(S 6uC CASM : a uni@ied state parameter model @or clay and sandC Int. J. Rum. /nal.
3et-. <eomec-anics7 ## : F#$/F9=7 $;;8C
(S 6u7 CC 5"on! et ?C Lan!C A uni@ied plasticity model @or cyclic be"aiour o@ clay
and sandC 3ec-anics 2esearc- +ommunications7 =H : ;:/$$H7 #&&:C
OC .ienIieUic37 CT c"n!7 +C )ettesC 2rained7 undrained7 consolidatin! dynamic
$& )iblio!rap"ie #;:
be"aiour assumptions in soilsC <eotec-ni)ue =& : =89/=;97 $;8&C
OC .ienIieUic37 .C Mr\3C Generali3ed plasticity @ormulation and applications to
!eomec"anicsC 3ec-anics of Cngineering 3aterials7 CS 2esai et '(
Galla!"er RedsS7 Liley7 C"C ==7 ppC F99/F:;7 $;8HC
OC .ienIieUic37 'L Taylor et ?. ."uC T"e @inite element met"od : ,ts )asis and
FundamentalsC JutterQort-.:einemann B$me dition7 #&&9C
#;8 $& )iblio!rap"ie
$& )iblio!rap"ie #;;
A%str&ct
T"e main tec"nical ob%ectie o@ t"is +"2 t"esis deals Uit" t"e deelopment o@ a soil
be"aior numerical toolC ,t s"ould be robust7 e@@icient and adapted to model t"e
mec"anical be"aior o@ !eotec"nical structures ReC!C embanIment damS under t"e
Uorst loadin! scenarii suc" eart"quaIesC
,n t"e @inite element met"od7 t"e quality results is directly linIed to t"e soil
constitutie model7 t"e inte!ration sc"eme and t"e numerical resolutionC ,n t"is +"2
T"esis7 t"e -C+ elastoplastic soil model is introduced in CodeTAster t"rou!" an
implicit sc"emeC An implicit sc"eme ensures to respect t"e t"eoretical @ormulation o@
t"e modelC T"e -C+ constitutie model is one o@ t"e models aailable in t"e
literature to represent t"e be"aiour o@ di@@erent Iinds o@ soils under cyclic loadin!s
and it is used since t"e 8&'s by "ydraulic en!ineers at -2FC ,t is expressed in terms
o@ e@@ectie stresses and in@initesimal strainsC T"e deelopments are alidated @or
laboratory tests in a lar!e scale o@ loadin! pat"sC On t"e ot"er "and7 t"e study o@ a
sand embanIment Uas per@ormed and compared to t"e results obtained Uit" t"e
@inite element so@tUare G-F2yn deeloped at -C+C
T"e -C+ model is based on a non/associated @loU rule and it is able to reproduce a
so@tenin! be"aiorC L"en s"ear bands occur in t"e structure7 t"ese properties lead
to a pat"olo!ical sensitiity o@ t"e results dependin! on t"e mes" si3eC T"ere@ore7 a
re!ulari3ation tec"nique "as to be used to circument t"is problem and to obtain
ob%ectie results Uit" respect to t"e mes"C T"e second !radient o@ dilation model is
t"us c"osen to be coupled to t"e -C+ model and in t"is Uay7 to ensure a spatio/
temporal independence o@ resultsC (oUeer7 t"is mes" independence still eoles in
a potential domain o@ solutions7 U"en instability occursC T"e simulations o@ drained
biaxial tests on laboratory samples s"oU a dependence o@ s"ear bands t"icIness in
re!ard to t"e initial stress state and material propertiesC
An analytical problem o@ a dilatant s"ear band is used to extract t"e Iey @actorsC
T"ese t"eoretical solutions are compared and alidated to numerical responses7
U"ic" are in !ood accordanceC A bearin! capacity problem Uas also soled to
demonstrate t"e potential o@ t"e met"odC T"e conclusion o@ t"is UorI establis"es t"e
main role o@ initial stress state oer t"e s"ear band t"icIness in t"e context o@ t"e
second !radient o@ dilation model and t"e models based on Cam/Clay approac"C
'e()!r*s $ soil cyclic be"aior model7 implicit sc"eme7 second !radient o@ dilation
model7 drained biaxial test7 bearin! capacity7 embanIment7 (u%eux modelC
=&& $& )iblio!rap"ie
Rsm
L'ob%ecti@ tec"nique ma%eur de cette t"4se se rapporte au deloppement d'un outil
de simulation numrique @iable et robuste adapt A la maQtrise et la connaissance du
@onctionnement mcanique des oura!es !otec"niquesC Cet outil de simulation doit
notamment permettre une maQtrise des scnarii les plus pnalisants pour leur tenue7
notamment sous l'ala sismiqueC
La qualit des rsultats d'un tel outil dans le cadre de la mt"ode des lments @inis
est @onction du mod4le de comportement utilis7 de la qualit de l'int!ration du
mod4le et de sa rsolution numriqueC 2ans le cadre de ce traail7 le mod4le
lastoplastique de comportement cyclique des sols de l'-C+ Rdit de (u%euxS a t
introduit dans CodeTAster selon un sc"ma d'int!ration implicite7 permettant ainsi
une reprsentation @ine et prcise des p"nom4nes mis en %eu durant l'ala
sismiqueC Ce mod4le poss4de !alement l'aanta!e d'Btre adapt au comportement
de di@@rents types de sols dans le cadre des milieux poreux sous l'"ypot"4se des
petites d@ormationsC Apr4s alidation sur des c"emins de c"ar!ement aris7 le
mod4le est A prsent utilis pour la simulation de la construction par couc"es7 de la
mise en eau et de la tenue sismique de barra!es en terreC
Le caract4re non standard et adoucissant de ce mod4le conduit A mettre en oeure
des tec"niques de r!ularisation pour rsoudre le probl4me de dpendance
pat"olo!ique des rsultats aux mailla!es lors de l'apparition de modes de ruine
localiseC Le mod4le de second !radient de dilatation est utilis en complment au
mod4le de comportement de (u%eux pour contrMler la lar!eur des bandes de
localisation apparaissant sur les structures tudiesC La prise en compte d'une
cinmatique enric"ie permet de rendre ob%ecties aux mailla!es les rponses des
structures durant leur p"ase d'adoucissement mais n'instaure pas l'unicit des
solutions aux probl4mes poss suite aux instabilitsC 2ans le cadre d'essais
biaxiaux drains sur des matriaux dilatants exprims au sein des milieux du
second !radient de dilatation7 il est apparu une dpendance de la lar!eur des
bandes de cisaillement A l'tat de contraintes initial en plus des proprits des
matriauxC
A partir d'un exemple analytique d'une bande de matriau cisaille7 cette
dpendance a pu Btre exprime7 compare et maQtrise en @onction des param4tres
de r!ularisation par rapport aux rsultats des simulations numriquesC L'extension
de cette approc"e A un cas de stabilit de pente sous c"ar!ement d'une @ondation
super@icielle a ensuite t entreprisC La dpendance des lar!eurs de bandes A l'tat
de contraintes initial est apparue comme un lment cl de la maQtrise du coupla!e
entre le mod4le de second !radient de dilatation et les mod4les de type Cam/ClayC
M!ts"c#s $ Comportement cyclique des sols7 sc"ma d'int!ration implicite7 milieu
du second !radient de dilatation7 essai biaxial drain7 stabilit de pente7 di!ue en
terre7 mod4le de (u%euxC
Vous aimerez peut-être aussi
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Corriges Des T.-D. D'optique PhysiqueDocument38 pagesCorriges Des T.-D. D'optique PhysiqueJalal TiYal88% (8)
- Cours Conception Reseau D'assainissementDocument66 pagesCours Conception Reseau D'assainissementYounes Bourkha100% (1)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Aide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesD'EverandAide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesPas encore d'évaluation
- Le Pert Et La ConstructionDocument125 pagesLe Pert Et La Constructionnadji187Pas encore d'évaluation
- GCAlgerie.com(263)Document365 pagesGCAlgerie.com(263)MESSAOUDI TEWFIKPas encore d'évaluation
- Simulation D'un Ecoulement TurbulentDocument73 pagesSimulation D'un Ecoulement Turbulentamine_abdalahPas encore d'évaluation
- Etude Critique Du Systeme D Orientation de La Roue Pelle N 3Document86 pagesEtude Critique Du Systeme D Orientation de La Roue Pelle N 3Bangoura MoussaPas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
- Note de Calcul PlomberieDocument7 pagesNote de Calcul Plomberieamak100% (9)
- CoursMeddour F Mat PDFDocument49 pagesCoursMeddour F Mat PDFMeddour BelkacemPas encore d'évaluation
- Sciences Industrielles Pour L'ingennieur, Tout-En-UnDocument272 pagesSciences Industrielles Pour L'ingennieur, Tout-En-UnAyoub Marraha50% (2)
- 1988 17 PDFDocument206 pages1988 17 PDFSalah SassiPas encore d'évaluation
- Cours-Hec-Ras PDFDocument43 pagesCours-Hec-Ras PDFHichem Magh100% (2)
- 2012-06-21 Rapport PRD Mohamed Amine EL FATTOUH PDFDocument155 pages2012-06-21 Rapport PRD Mohamed Amine EL FATTOUH PDFAbd El-khaleq Aït TalebPas encore d'évaluation
- Mémoire Controle de Poids PDFDocument96 pagesMémoire Controle de Poids PDFBayaPas encore d'évaluation
- Asme PTC 6-2004Document13 pagesAsme PTC 6-2004Khalid Deliege100% (1)
- JT Seisme 2012 J2 5 Calcul Fondations Murs V0 PDFDocument54 pagesJT Seisme 2012 J2 5 Calcul Fondations Murs V0 PDFBenjamin ConradPas encore d'évaluation
- Kha5791 PDFDocument165 pagesKha5791 PDFKHALEDFEKAIRPas encore d'évaluation
- Memoire These FoucaultDocument297 pagesMemoire These FoucaultYusufPas encore d'évaluation
- PHD J NininDocument175 pagesPHD J NininAYA OUEZGANPas encore d'évaluation
- Evaluation de La Stabilite Transitoire Des Reseaux D Energie Electrique en Presence de Defaut Non Symetriques PDFDocument94 pagesEvaluation de La Stabilite Transitoire Des Reseaux D Energie Electrique en Presence de Defaut Non Symetriques PDFالشاكر للهPas encore d'évaluation
- Asservissement de Niveau - À Vanne Motorisée - Bouzekri ADocument31 pagesAsservissement de Niveau - À Vanne Motorisée - Bouzekri AJaouad Diouri50% (2)
- MQ60881 PDFDocument196 pagesMQ60881 PDFAbdelkaderBoularafPas encore d'évaluation
- Optimisation de La Tête D'extrusion Pour La Fabrication de Pièces Thermoplastiques PDFDocument219 pagesOptimisation de La Tête D'extrusion Pour La Fabrication de Pièces Thermoplastiques PDFMed Ali100% (1)
- Mémoire 2012Document259 pagesMémoire 2012lazhorPas encore d'évaluation
- MER 2016 DiffusionDocument177 pagesMER 2016 DiffusionAmin iberkakPas encore d'évaluation
- D'un Et: Thdme Maitrise 6talement Urbain Durable Conception D'un Quartier P6riph6rie Boufarik Clinique MdreDocument111 pagesD'un Et: Thdme Maitrise 6talement Urbain Durable Conception D'un Quartier P6riph6rie Boufarik Clinique MdreSabrina MaatarPas encore d'évaluation
- 1995TH Maleki K NS19171Document366 pages1995TH Maleki K NS19171sebouppppPas encore d'évaluation
- Memoire de Master: Évaluation Des Indicateurs de Performance Dans Un Réseau D'assainissement UrbainDocument74 pagesMemoire de Master: Évaluation Des Indicateurs de Performance Dans Un Réseau D'assainissement UrbainSeptimus PierrePas encore d'évaluation
- Theme: MemoireDocument124 pagesTheme: MemoireSalma BahoumadPas encore d'évaluation
- BAA6891Document119 pagesBAA6891Lüna SînaPas encore d'évaluation
- 2005 Oudjene MDocument199 pages2005 Oudjene MRachid Zekraoui100% (1)
- Calcul Plastique Des Poutres CDocument6 pagesCalcul Plastique Des Poutres CMohamed MnifPas encore d'évaluation
- Image de Défauts en SurfaceDocument9 pagesImage de Défauts en SurfaceLevaillant ErwanPas encore d'évaluation
- Bib 942f9b17ecdcDocument338 pagesBib 942f9b17ecdcAnonymous z5EIDvQdPas encore d'évaluation
- 2006 CLF 21677Document166 pages2006 CLF 21677gabyy7985Pas encore d'évaluation
- Segmentation Dimages Et Morphologie Mathematique PDFDocument303 pagesSegmentation Dimages Et Morphologie Mathematique PDFKhadhra LassouedPas encore d'évaluation
- شيباني خديجة ملاطىة مووشيDocument118 pagesشيباني خديجة ملاطىة مووشيAzzedine GarahPas encore d'évaluation
- 2017ESMA0019 RotellaDocument307 pages2017ESMA0019 RotellaMathieuPas encore d'évaluation
- Étude de Nouvelles Fonctions Radiofréquences À Base D'antennes À Onde de Fuite CRLH PDFDocument188 pagesÉtude de Nouvelles Fonctions Radiofréquences À Base D'antennes À Onde de Fuite CRLH PDFNabil DakhliPas encore d'évaluation
- 04 Pont Endommagement Modele NumeriqueDocument35 pages04 Pont Endommagement Modele NumeriqueFouad KehilaPas encore d'évaluation
- Rapport 2023-06-13 RMN Cfms Complet v5 WebDocument98 pagesRapport 2023-06-13 RMN Cfms Complet v5 WebJairo Pascoal JuniorPas encore d'évaluation
- FontesDocument219 pagesFontesمحمدلمينابراهيمالموريتانيPas encore d'évaluation
- Battvoithybridemigration É-Photo Imp@@Document200 pagesBattvoithybridemigration É-Photo Imp@@BordeauxMeknesAlamesPas encore d'évaluation
- These D.drayDocument196 pagesThese D.drayMahdi ElgolliPas encore d'évaluation
- These HamideDocument286 pagesThese HamideYancheng ZhangPas encore d'évaluation
- Modélisation 1D Du Comportement D'un Clarificateur Avec GPS XDocument94 pagesModélisation 1D Du Comportement D'un Clarificateur Avec GPS Xmaya ben mahmoudPas encore d'évaluation
- Évaluation de La Stabilité Transitoire Des Réseaux D' Énergie Électrique en Présence de Défaut Non SymétriquesDocument94 pagesÉvaluation de La Stabilité Transitoire Des Réseaux D' Énergie Électrique en Présence de Défaut Non Symétriqueszaki100% (1)
- 2000LEMA1011Document224 pages2000LEMA1011Jilani BejaouiPas encore d'évaluation
- Appel A Candidature CEDOC 2013 2014Document12 pagesAppel A Candidature CEDOC 2013 2014Adnane KaananePas encore d'évaluation
- Une Introduction Aux Processus SédimentairesDocument123 pagesUne Introduction Aux Processus Sédimentairesalimahroug100% (1)
- Pfe Do Fluent PDFDocument89 pagesPfe Do Fluent PDFsalmaPas encore d'évaluation
- These CoquillayDocument249 pagesThese CoquillayYouness Charih100% (1)
- Ing 0067Document127 pagesIng 0067Nabil Merabet100% (2)
- Projet SolDocument156 pagesProjet Solahmed lagdaaPas encore d'évaluation
- Initiation au travail intellectuel et à la recherche: Pratique réflexive de recherche scientifiqueD'EverandInitiation au travail intellectuel et à la recherche: Pratique réflexive de recherche scientifiquePas encore d'évaluation
- Méthodes de planification en transport: Deuxième éditionD'EverandMéthodes de planification en transport: Deuxième éditionPas encore d'évaluation
- Paysages en évolution: L'observatoire photographique de MemphrémagogD'EverandPaysages en évolution: L'observatoire photographique de MemphrémagogPas encore d'évaluation
- Optimisation D'un Système D'isolationDocument60 pagesOptimisation D'un Système D'isolationalielbarPas encore d'évaluation
- Sollicitations Et Contraintes PDFDocument9 pagesSollicitations Et Contraintes PDFZouhair BoukriPas encore d'évaluation
- Chapter 2Document25 pagesChapter 2Andrea PournyPas encore d'évaluation
- 04 - Tir - FlirDocument191 pages04 - Tir - FlirImane LamdainePas encore d'évaluation
- Chapitre 1 Théorie Des ContraintesDocument32 pagesChapitre 1 Théorie Des ContraintesDonald HANTANPas encore d'évaluation
- Cour 2 BiofDocument70 pagesCour 2 BiofSalim YassinePas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 Lycée Pilote Avec Correction - Sciences Physiques - 1ère AS (2013-2014) Mme BEN RABEHDocument4 pagesDevoir Corrigé de Contrôle N°2 Lycée Pilote Avec Correction - Sciences Physiques - 1ère AS (2013-2014) Mme BEN RABEHwalidPas encore d'évaluation
- Cours Ancrage AdherenceDocument5 pagesCours Ancrage AdherenceAbdelwahab ElaichiPas encore d'évaluation
- Bilans D'entropie. Second Principe de Le ThermodynamiqueDocument16 pagesBilans D'entropie. Second Principe de Le ThermodynamiqueissamPas encore d'évaluation
- UntitledDocument2 pagesUntitledMalo PapinPas encore d'évaluation
- Formulaire Audioprothese 2ADocument3 pagesFormulaire Audioprothese 2Amyriagon educationPas encore d'évaluation
- Optique GeometriqueDocument19 pagesOptique GeometriqueSouha LachachiPas encore d'évaluation
- Chaudiere 64 PagesDocument64 pagesChaudiere 64 PagesAlain GARNIER100% (1)
- Al Omrane Fes Etude Geotechnique Marche N°34-2017Document10 pagesAl Omrane Fes Etude Geotechnique Marche N°34-2017Abdelilah ElmahsaniPas encore d'évaluation
- Télécommunications Par Fibre Optique: Et La Lumière Révolutionna Les TélécomsDocument18 pagesTélécommunications Par Fibre Optique: Et La Lumière Révolutionna Les Télécomsasmaa dinePas encore d'évaluation
- CHAP 0 - Traitement de L'air 1Document17 pagesCHAP 0 - Traitement de L'air 1RulliamPrince ZakouPas encore d'évaluation
- Exo 6 Camion PompierDocument2 pagesExo 6 Camion PompierMama Samba SALL100% (1)
- Fiche TD-5 Avec CorrigéDocument6 pagesFiche TD-5 Avec CorrigéFarouk AliPas encore d'évaluation
- Tpe 1 Licence 2 GbatDocument2 pagesTpe 1 Licence 2 GbatToh Habib Kone100% (1)
- Physique MP1 2006Document9 pagesPhysique MP1 2006api-3762501Pas encore d'évaluation
- Electrochimie-Chapitre 1-R-KIHALDocument15 pagesElectrochimie-Chapitre 1-R-KIHALManar Smith100% (1)
- Espci Meca Flu Chap4 PDFDocument10 pagesEspci Meca Flu Chap4 PDFAbdessemed FouziPas encore d'évaluation
- ExosDocument2 pagesExosahlamPas encore d'évaluation
- 86959064sp-vg FrendeDocument52 pages86959064sp-vg FrendeMaria TzagarakiPas encore d'évaluation
- Chapitre-2 - Suivi Temporel D'une Transformation Chimique - Vitesse de RéactionDocument5 pagesChapitre-2 - Suivi Temporel D'une Transformation Chimique - Vitesse de Réactiona houssPas encore d'évaluation
- Corps Noir2016Document4 pagesCorps Noir2016Naturel NaturaPas encore d'évaluation