Vous aimerez peut-être aussi
- Exercice Tolerance Geometrique PRDocument1 pageExercice Tolerance Geometrique PRHamrouni100% (2)
- Theorie Des Mecanismes Et Des Machines I & Ii: Docteur Claude Valery NGAYIHI ABBEDocument94 pagesTheorie Des Mecanismes Et Des Machines I & Ii: Docteur Claude Valery NGAYIHI ABBEStanislas Snakerman90% (10)
- Exemple Sujet Expression Ecrite TCF PDFDocument8 pagesExemple Sujet Expression Ecrite TCF PDFFirass Chafai100% (1)
- Test de Français InternationalDocument188 pagesTest de Français InternationalMar Crespo100% (8)
- Reef4 - NF en 14199Document4 pagesReef4 - NF en 14199ajalil2000Pas encore d'évaluation
- 13 9 TD - Transmission PDFDocument10 pages13 9 TD - Transmission PDFRanya ouherrouPas encore d'évaluation
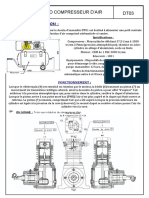
- TD CompresseurDocument11 pagesTD CompresseurSamba Sall100% (1)
- TD 2 EngrenagesDocument4 pagesTD 2 EngrenagesPFEPas encore d'évaluation
- TD Compresseur eDocument8 pagesTD Compresseur entayoub100% (2)
- TD Bride HydrauliqueDocument6 pagesTD Bride Hydrauliquekefnei89% (9)
- Cours D Usinage de L IsostatismeDocument8 pagesCours D Usinage de L Isostatismeredataliani123100% (10)
- Liaison MecaniqueDocument13 pagesLiaison MecaniqueSmirnov Artaéév100% (6)
- Analyse FonctionnelleDocument6 pagesAnalyse FonctionnelleKamel Bousnina100% (1)
- (Tec) (TD) Dimensionnement de RoulementsDocument4 pages(Tec) (TD) Dimensionnement de RoulementsBouba Rabeb100% (2)
- TP AbaqusDocument12 pagesTP AbaqusFirass Chafai100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDocument4 pagesExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821Pas encore d'évaluation
- Construction MécaniqueDocument70 pagesConstruction MécaniqueMohamed EddriefPas encore d'évaluation
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesConception & Fabrication MécaniquePas encore d'évaluation
- 17 Train ÉpicycloïdauxDocument9 pages17 Train Épicycloïdauxzouhour brahmiPas encore d'évaluation
- Cours Et TD Conception IIDocument124 pagesCours Et TD Conception IIhocine gherbi100% (5)
- CPI1 CONST TD Exercices EngrenagesDocument4 pagesCPI1 CONST TD Exercices Engrenagesyassine lakhalPas encore d'évaluation
- Unité Transmettre 1 STE - Partie 1Document68 pagesUnité Transmettre 1 STE - Partie 1Boulette Moulay Hfid67% (3)
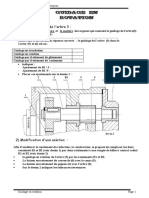
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- Mip Map Doc-Prof MoukhtariDocument8 pagesMip Map Doc-Prof MoukhtariMeryemHmouri100% (1)
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- Mise Et Maintien en Position Isostatique PDFDocument8 pagesMise Et Maintien en Position Isostatique PDFzakaria100% (2)
- Unité Transmettre 1 STE - Partie 2Document50 pagesUnité Transmettre 1 STE - Partie 2Boulette Moulay Hfid96% (24)
- Résumé TransmettreDocument18 pagesRésumé TransmettreMehdi Ben Zouine100% (3)
- Polycopié Construction Mecanique 1Document82 pagesPolycopié Construction Mecanique 1Sylia Boukhiar100% (1)
- Recueil Travaux Dirigés Tech Const PDFDocument62 pagesRecueil Travaux Dirigés Tech Const PDFWafa Raboudi100% (6)
- 08 Maquette Embrayag DisqueDocument5 pages08 Maquette Embrayag Disquederwiche100% (1)
- 2STM CoursDocument83 pages2STM CoursOUTEMSAA100% (1)
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- 06 MECA0444-ArbresIDocument49 pages06 MECA0444-ArbresIElmehdi ElmessaoudiPas encore d'évaluation
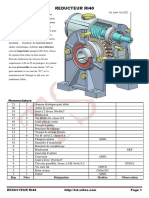
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- TD N 1 Theorie Des MecanismesDocument5 pagesTD N 1 Theorie Des MecanismesBahaz100% (1)
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Mecanique Statique Statique s1 Moments Resultants - 5a278f941723dd2ef261a7a5 PDFDocument1 pageMecanique Statique Statique s1 Moments Resultants - 5a278f941723dd2ef261a7a5 PDFazzam100% (2)
- Devoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFDocument5 pagesDevoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFMohamed B'nPas encore d'évaluation
- Série 01 Avec Solution TypeDocument3 pagesSérie 01 Avec Solution Typenafaa_ali1375Pas encore d'évaluation
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFHanane Tounsi100% (2)
- Analyse Fonctionnelle Interne D'un ProduitDocument5 pagesAnalyse Fonctionnelle Interne D'un ProduitMohsen Laabidi100% (1)
- AssemblagesDocument7 pagesAssemblagesAdouni ZakPas encore d'évaluation
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Sujet de Projet Banc D'essai de FlexionDocument73 pagesSujet de Projet Banc D'essai de FlexionHajar Oumnas100% (3)
- TechnologieDocument46 pagesTechnologieyacine100% (1)
- Theorie Des Mecanismes MisDocument42 pagesTheorie Des Mecanismes MisSemlali Zakaria100% (2)
- Schemas Cinematiques Exos CorrigesDocument5 pagesSchemas Cinematiques Exos Corrigesmar ali0% (1)
- M09 Coursgeniemecanique Conception Et Dessin D Outillages de Production Version 2-FM-TSMFMDocument116 pagesM09 Coursgeniemecanique Conception Et Dessin D Outillages de Production Version 2-FM-TSMFMMohamed Sahil100% (2)
- Exercices Mecanique GeneraleDocument295 pagesExercices Mecanique GeneraleSalah-eddine ZitiPas encore d'évaluation
- Cours RessortsDocument43 pagesCours RessortsYounessElkarkouri100% (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocument6 pagesTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaPas encore d'évaluation
- Progression Programme 2STMDocument1 pageProgression Programme 2STMadil100% (1)
- Transformation Des Mvts ApplicationDocument4 pagesTransformation Des Mvts ApplicationMIMFS50% (2)
- TD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airDocument99 pagesTD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airCHOKRI Atef100% (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Concept 2Document0 pageConcept 2Ben Aissa ChokriPas encore d'évaluation
- PDF PDFDocument45 pagesPDF PDFFirass ChafaiPas encore d'évaluation
- TP1Document12 pagesTP1Firass ChafaiPas encore d'évaluation
- Effort de Coupe PDFDocument2 pagesEffort de Coupe PDFFirass ChafaiPas encore d'évaluation
- Rapport FinaleDocument50 pagesRapport FinaleFirass ChafaiPas encore d'évaluation
- PDFDocument45 pagesPDFFirass Chafai100% (1)
- La Maintenance Industrielle WWW Cours-Electromecanique ComDocument216 pagesLa Maintenance Industrielle WWW Cours-Electromecanique ComYounessElkarkouri0% (1)
- Transmission PDFDocument28 pagesTransmission PDFFirass ChafaiPas encore d'évaluation
- Transmission PDFDocument28 pagesTransmission PDFFirass ChafaiPas encore d'évaluation
- Transmission PDFDocument28 pagesTransmission PDFFirass ChafaiPas encore d'évaluation
- RadiographieDocument41 pagesRadiographieFirass ChafaiPas encore d'évaluation
- Chap1 Le RessuageDocument20 pagesChap1 Le RessuageFirass ChafaiPas encore d'évaluation
- Cours Techniques de ProductionDocument108 pagesCours Techniques de ProductionKOOPas encore d'évaluation
- Les UltrasonsDocument31 pagesLes UltrasonsFirass Chafai100% (1)
- Les Courants de FoucaultDocument26 pagesLes Courants de FoucaultFirass Chafai100% (1)
- La MagnétoscopieDocument25 pagesLa MagnétoscopieFirass Chafai100% (3)
- Cours Dessin TechniqueDocument118 pagesCours Dessin TechniqueFirass Chafai75% (4)
- Sujet 1 PDFDocument10 pagesSujet 1 PDFLarbi ElbakkaliPas encore d'évaluation
- Production AutomatiséeDocument118 pagesProduction AutomatiséeFirass ChafaiPas encore d'évaluation
- Sujet 1 PDFDocument10 pagesSujet 1 PDFLarbi ElbakkaliPas encore d'évaluation
- Comment Enlever Et Supprimer Le Root Android - AndroidPITDocument12 pagesComment Enlever Et Supprimer Le Root Android - AndroidPITDocteknoPas encore d'évaluation
- Travaux Dirigés: Systèmes AutomatisésDocument7 pagesTravaux Dirigés: Systèmes AutomatisésAnas YassinePas encore d'évaluation
- Java - Partie2Document26 pagesJava - Partie2Farah HkiriPas encore d'évaluation
- 13L2-Corrige Exam SI PDFDocument3 pages13L2-Corrige Exam SI PDFChàhiid SimoPas encore d'évaluation
- Plate Bande FAODocument19 pagesPlate Bande FAOSeif HabbachiPas encore d'évaluation
- Chapitre 3 PDFDocument28 pagesChapitre 3 PDFSAMed100% (4)
- Intelligence Economique Et Strategique Les Systemes D Information Au Coeur de La DemarcheDocument132 pagesIntelligence Economique Et Strategique Les Systemes D Information Au Coeur de La DemarcheFatiha ArsmoukPas encore d'évaluation
- Algorithme Cours Et ExerceceDocument169 pagesAlgorithme Cours Et ExerceceBBCM AbdELPas encore d'évaluation
- Cours AngularDocument5 pagesCours AngularsalehoulhajPas encore d'évaluation
- Les Fonctions en Python: 1. Qu'est-Ce Qu'une Fonction en Python?Document5 pagesLes Fonctions en Python: 1. Qu'est-Ce Qu'une Fonction en Python?bertrand sotyPas encore d'évaluation
- Timmer 15336 PDFDocument1 pageTimmer 15336 PDFHenrypuchoPas encore d'évaluation
- Rapport MASTERDocument46 pagesRapport MASTERMaxime.bassetPas encore d'évaluation
- Mega Bloks Set 96973 Halo Anniversary Edition - UNSC WarthogDocument32 pagesMega Bloks Set 96973 Halo Anniversary Edition - UNSC WarthogRosario Vargas FloresPas encore d'évaluation
- Catalogue 09 10Document102 pagesCatalogue 09 10splpPas encore d'évaluation
- Micro Control EurDocument59 pagesMicro Control EurSolo Netland100% (1)
- Chapitre 6Document24 pagesChapitre 6infcom100% (1)
- 3D MaxDocument459 pages3D MaxAboSuliemanPas encore d'évaluation
- InterviewDocument4 pagesInterviewrayanebahri55Pas encore d'évaluation
- Comment Téléphoner Gratuitement Sur Les Fixes Partout Dans Le MondeDocument22 pagesComment Téléphoner Gratuitement Sur Les Fixes Partout Dans Le MondeValéry Epee EbonguePas encore d'évaluation
- 2012 2013 MP23 L1PCDocument192 pages2012 2013 MP23 L1PCadsDggg100% (1)
- Épreuves DgaprDocument3 pagesÉpreuves Dgaprkira525Pas encore d'évaluation
- DBAI Les01 Rev1 1 PDFDocument48 pagesDBAI Les01 Rev1 1 PDFa.rharrabPas encore d'évaluation
- Uni-Telway Protocols PDFDocument76 pagesUni-Telway Protocols PDFRuben Cebrian DominguezPas encore d'évaluation
- Handbook Conteneur PDFDocument14 pagesHandbook Conteneur PDFAnonymous V4ugOo100% (1)
- Programmer Efficacement Microsoft ExcelDocument46 pagesProgrammer Efficacement Microsoft ExcelTheonlyone01100% (6)
- CV Mathias Ervyn - Digital Marketing StorytellerDocument2 pagesCV Mathias Ervyn - Digital Marketing StorytellerMathias ErvynPas encore d'évaluation
- Dchapitre 4Document13 pagesDchapitre 4Salma ElkaddouriPas encore d'évaluation
- TimardlDocument2 pagesTimardlMourad TimarPas encore d'évaluation
- Chapitre 2CDocument11 pagesChapitre 2CChaymaePas encore d'évaluation