Vous aimerez peut-être aussi
- Rapport de StageDocument60 pagesRapport de StageSemsem DerouichePas encore d'évaluation
- ITopDocument21 pagesITopSanae Chadi50% (2)
- Résumé PRINCE2Document11 pagesRésumé PRINCE2Milano MilanPas encore d'évaluation
- 3 Guide Methodologique de MAREVADocument34 pages3 Guide Methodologique de MAREVAAmal ChafaiiPas encore d'évaluation
- Compte Rendu Projet ERPDocument2 pagesCompte Rendu Projet ERPabdelaati wafaPas encore d'évaluation
- Dat P3 AsrsDocument7 pagesDat P3 AsrsMbotta WilliamPas encore d'évaluation
- OCTO WP DevOps Vol1 WebDocument92 pagesOCTO WP DevOps Vol1 Websplit_2002Pas encore d'évaluation
- ExrecicesDocument18 pagesExrecicesabmenasriayahoo.frPas encore d'évaluation
- Shibboleth InstallationDocument23 pagesShibboleth InstallationKOFFI LéandrePas encore d'évaluation
- Mc3a9thodes Arabe Littc3a9ralDocument2 pagesMc3a9thodes Arabe Littc3a9ralJaffyPas encore d'évaluation
- Exercices Supplementaire CisaillementDocument3 pagesExercices Supplementaire Cisaillementmansour leye100% (4)
- Moteurs Diesel: CaractéristiquesDocument38 pagesMoteurs Diesel: CaractéristiquesBen BenPas encore d'évaluation
- Alfa Laval Evaporateur en FRDocument30 pagesAlfa Laval Evaporateur en FRdrevetph6233Pas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- De L'infrastructure Virtuelle Au Cloud Privé Et HybrideDocument243 pagesDe L'infrastructure Virtuelle Au Cloud Privé Et HybrideGolinduche100% (1)
- CMMI CoursDocument65 pagesCMMI CoursSonia GkPas encore d'évaluation
- M20483 Formation Programmation en Csharp PDFDocument2 pagesM20483 Formation Programmation en Csharp PDFCertyouFormationPas encore d'évaluation
- Post Gre SQLDocument11 pagesPost Gre SQLkhadidja khadidjaPas encore d'évaluation
- Installation Ocs-GlpiDocument68 pagesInstallation Ocs-Glpiapi-286474241Pas encore d'évaluation
- BPMBZ Formation Bizagui Modeliser BPMN PDFDocument2 pagesBPMBZ Formation Bizagui Modeliser BPMN PDFCertyouFormationPas encore d'évaluation
- TestLink 1.9.20.1 (DEV) PDFDocument39 pagesTestLink 1.9.20.1 (DEV) PDFMhamed Miled100% (1)
- PDFDocument109 pagesPDFGhanou StarlinePas encore d'évaluation
- Chap 1-10 ACG2 Gestion Des ProjetsDocument158 pagesChap 1-10 ACG2 Gestion Des ProjetsStephane Phanotron MbaïammadjiPas encore d'évaluation
- Solution Info XDocument4 pagesSolution Info XDelphisamPas encore d'évaluation
- ItilDocument342 pagesItilEmina Ahmed maeloumPas encore d'évaluation
- Ansible Pour Devops: Par Dirane TafenDocument49 pagesAnsible Pour Devops: Par Dirane Tafenfatma daasPas encore d'évaluation
- m2 Cca Cas Gatecol Sap O2cDocument16 pagesm2 Cca Cas Gatecol Sap O2cSaid GourramPas encore d'évaluation
- Etude Conception Et Réalisation D'un Parc Informatique, Méthodes EBIOS Et ITILDocument26 pagesEtude Conception Et Réalisation D'un Parc Informatique, Méthodes EBIOS Et ITILZoubida ELKARKHI100% (1)
- Livre Blanc Securite Et Cloud ComputingDocument9 pagesLivre Blanc Securite Et Cloud ComputingYassine BounaguiPas encore d'évaluation
- TP6 Fonctionnement Itop (Partie 2) PDFDocument14 pagesTP6 Fonctionnement Itop (Partie 2) PDFwassimaPas encore d'évaluation
- Mini Projet ExpoDocument4 pagesMini Projet Expoسعيد سعيدPas encore d'évaluation
- Chapitre 1 SMILDocument39 pagesChapitre 1 SMILkarim labidiPas encore d'évaluation
- IS27001LA Formation Iso Iec 27001 Lead Auditor PDFDocument2 pagesIS27001LA Formation Iso Iec 27001 Lead Auditor PDFCertyouFormationPas encore d'évaluation
- Expose DevOps 2Document5 pagesExpose DevOps 2Kev QlfPas encore d'évaluation
- Support de Formation ITIL 4 F - Updated - 4Document5 pagesSupport de Formation ITIL 4 F - Updated - 4Ordan Karrel Njanteng NounjioPas encore d'évaluation
- M10748 Formation Microsoft System Center 2012 Configuration Manager SCCM Deploiement PDFDocument2 pagesM10748 Formation Microsoft System Center 2012 Configuration Manager SCCM Deploiement PDFCertyouFormation50% (2)
- TP NetflowDocument2 pagesTP NetflowNawel Bentayeb epouse HocinePas encore d'évaluation
- Implementation D'un Reseau Hybride Securise Avec Linux Comme Controleur Principale de Domaine Dans Une Entreprise: Cas de Cey-LeronDocument75 pagesImplementation D'un Reseau Hybride Securise Avec Linux Comme Controleur Principale de Domaine Dans Une Entreprise: Cas de Cey-LeronArmel DadiéPas encore d'évaluation
- Memoire Online - Securite Dans Les Systèmes Temps Reel - Thomas VanderlindenDocument94 pagesMemoire Online - Securite Dans Les Systèmes Temps Reel - Thomas VanderlindenMounir BarakaPas encore d'évaluation
- Jira Guide UtilisateurDocument19 pagesJira Guide Utilisateurhermine NGO MINTAMACK100% (1)
- La VirtualisationDocument24 pagesLa VirtualisationEmma Mila100% (1)
- Livre Dunod ItilDocument8 pagesLivre Dunod ItilsevemassePas encore d'évaluation
- Gestion de Projetsv1Document48 pagesGestion de Projetsv1Badreddine BouchouirabPas encore d'évaluation
- Sparkml 170218214151 PDFDocument50 pagesSparkml 170218214151 PDFIl Capo Dei CapeiPas encore d'évaluation
- TP1 - Jasper Server & IreportDocument5 pagesTP1 - Jasper Server & IreportOmrani AchrafPas encore d'évaluation
- J2EE Web TierDocument126 pagesJ2EE Web TierAbdelmadjid BouamamaPas encore d'évaluation
- Itil V3Document120 pagesItil V3Serge PacomePas encore d'évaluation
- Naji Itil QCMDocument1 pageNaji Itil QCMSekou TOGOLAPas encore d'évaluation
- Fiche Metier-Manager IT PDFDocument3 pagesFiche Metier-Manager IT PDFToufik AIPas encore d'évaluation
- Config AlcatelDocument7 pagesConfig AlcatelJoseph EdwardsPas encore d'évaluation
- AZ 900T0X FR PowerPoint - 01Document28 pagesAZ 900T0X FR PowerPoint - 01dounia bensalah100% (1)
- Amouhal Nouhayla SfeDocument52 pagesAmouhal Nouhayla SfenohailaPas encore d'évaluation
- Travaux Pratiques m207 V1!0!62f6ea520ff32Document58 pagesTravaux Pratiques m207 V1!0!62f6ea520ff32Hamza ChaloutPas encore d'évaluation
- Android 1Document10 pagesAndroid 1hamid sakatPas encore d'évaluation
- Formation GLPIDocument15 pagesFormation GLPIOmar AbdouPas encore d'évaluation
- CISCO Protocoles Et Concepts de RoutageDocument357 pagesCISCO Protocoles Et Concepts de RoutageFabrice leonel Toukam PoualeuPas encore d'évaluation
- TP Pki 2.1Document12 pagesTP Pki 2.1bioine100% (1)
- Administration de Bases de DonnéesDocument22 pagesAdministration de Bases de DonnéesMahfoud OutanaltePas encore d'évaluation
- Cours 7 Exploitation ITDocument46 pagesCours 7 Exploitation ITUrban BeugPas encore d'évaluation
- Gestion de La Qualité - ITILDocument82 pagesGestion de La Qualité - ITILPFEPas encore d'évaluation
- Chapitre V Protocole RIP v1Document22 pagesChapitre V Protocole RIP v1Latif EsselamiPas encore d'évaluation
- Initiation HTML Et CSSDocument25 pagesInitiation HTML Et CSSChiheb MezriguiPas encore d'évaluation
- Astuces ISO 22301 PDFDocument2 pagesAstuces ISO 22301 PDFBaraa BaizidiPas encore d'évaluation
- G Om Trie Euclidienne El MentaireDocument243 pagesG Om Trie Euclidienne El MentaireJaffyPas encore d'évaluation
- Text Arab 18Document26 pagesText Arab 18JaffyPas encore d'évaluation
- Algèbre 1 V. Def 2017-2018 PDFDocument141 pagesAlgèbre 1 V. Def 2017-2018 PDFJaffyPas encore d'évaluation
- Cahier D'activités Python Pour Les Kids - EyrollesDocument66 pagesCahier D'activités Python Pour Les Kids - EyrollesJaffyPas encore d'évaluation
- Chapitre 2Document14 pagesChapitre 2JaffyPas encore d'évaluation
- 2018-2019 DSV S2Document41 pages2018-2019 DSV S2JaffyPas encore d'évaluation
- TextArab 19Document25 pagesTextArab 19JaffyPas encore d'évaluation
- TextArab 17Document26 pagesTextArab 17JaffyPas encore d'évaluation
- Tableau Profilés IPEDocument1 pageTableau Profilés IPEJaffyPas encore d'évaluation
- Introduction À L'intelligence ArtificielleDocument40 pagesIntroduction À L'intelligence ArtificielleJaffyPas encore d'évaluation
- Les Bases de La Programmation PDFDocument255 pagesLes Bases de La Programmation PDFJaffyPas encore d'évaluation
- Juliette Legrand 2017 60808 PDFDocument37 pagesJuliette Legrand 2017 60808 PDFJaffyPas encore d'évaluation
- Dimension Finie PDFDocument27 pagesDimension Finie PDFJaffyPas encore d'évaluation
- Dimension Finie PDFDocument27 pagesDimension Finie PDFJaffyPas encore d'évaluation
- Formular Autorizatie Iesire Din FrantaDocument1 pageFormular Autorizatie Iesire Din FrantaKing CrowleyPas encore d'évaluation
- Mecastat 1Document144 pagesMecastat 1JaffyPas encore d'évaluation
- Cours Traitement Du SignalDocument488 pagesCours Traitement Du SignalJaffyPas encore d'évaluation
- Chaudiere Vapeur VAP-LN Babcock WansonDocument2 pagesChaudiere Vapeur VAP-LN Babcock WansonzakariaPas encore d'évaluation
- Chap 4 - TABLIERDocument29 pagesChap 4 - TABLIERHhhPas encore d'évaluation
- TD N°1 Et 2 Ecoul Surface LibreDocument2 pagesTD N°1 Et 2 Ecoul Surface Librerabhim877Pas encore d'évaluation
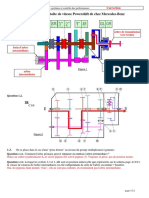
- Projet de Béton Précontraint-1Document31 pagesProjet de Béton Précontraint-1Latif SemdePas encore d'évaluation
- Renault Moteur Diesel Series MIDS MIVRDocument50 pagesRenault Moteur Diesel Series MIDS MIVRwoulkan67% (3)
- MMC - Chapitre 4 - MansouriDocument61 pagesMMC - Chapitre 4 - MansouriBitti FaskPas encore d'évaluation
- Corr - DM Nc2b03 de La ThermochimieDocument2 pagesCorr - DM Nc2b03 de La ThermochimieLoïc MBELE KASTHANEPas encore d'évaluation
- Applications Equations LocalesDocument13 pagesApplications Equations Localesmeriemmalika.aibPas encore d'évaluation
- 00054507700-MPI Einspritz - Und Zundanlage 4-ZylinderDocument160 pages00054507700-MPI Einspritz - Und Zundanlage 4-Zylinderravetromain2608Pas encore d'évaluation
- Cours EHTP 2011 2012 2ème Partie PDFDocument62 pagesCours EHTP 2011 2012 2ème Partie PDFobouhesyassinePas encore d'évaluation
- Audi A3 Sportback Notice Simplifiee Mode EmploiDocument16 pagesAudi A3 Sportback Notice Simplifiee Mode EmploiPhilippe FaurotPas encore d'évaluation
- 2023 Reunion J1 Exo2 Correction TweenerLob 5ptsDocument2 pages2023 Reunion J1 Exo2 Correction TweenerLob 5ptslexsacha131Pas encore d'évaluation
- Séminaire CompresseurDocument59 pagesSéminaire Compresseurballa bammounePas encore d'évaluation
- Ejetor Venuri JacobDocument8 pagesEjetor Venuri JacoboliveiralauroPas encore d'évaluation
- Chapitre 1 - Conception MécaniqueDocument20 pagesChapitre 1 - Conception Mécaniqueسيف الدين يعقوبيPas encore d'évaluation
- Rapport de StageDocument12 pagesRapport de Stageoussamaouallal72Pas encore d'évaluation
- 7401 g211 Correction EaDocument12 pages7401 g211 Correction Eamihai_1957Pas encore d'évaluation
- Essais MécaniqueDocument3 pagesEssais MécaniqueBoussalia LatifaPas encore d'évaluation
- 1 Chap N°01 Généraliti Et CalorimétrieDocument29 pages1 Chap N°01 Généraliti Et CalorimétrieYassine SabekPas encore d'évaluation
- La Géométrie Des Trains Roulants - Académie de Nancy-MetzDocument10 pagesLa Géométrie Des Trains Roulants - Académie de Nancy-MetzSAADBPas encore d'évaluation
- 1-1 RemovedDocument15 pages1-1 RemovedYOU CEFPas encore d'évaluation
- Asservessemenet de La Vitesse Lineaire 10 PDFDocument28 pagesAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- Element de Machine I-1Document12 pagesElement de Machine I-1ulrich borel tchinda melongPas encore d'évaluation
- FORMATION Complete Ecrit PDFDocument166 pagesFORMATION Complete Ecrit PDFYves-Régis DINGAPas encore d'évaluation
- These BenallalDocument196 pagesThese BenallalMory NdiayePas encore d'évaluation
- La Maintenance Préventive ConditionnelleDocument5 pagesLa Maintenance Préventive ConditionnelleAzeddine Boughmar0% (1)