Académique Documents
Professionnel Documents
Culture Documents
Chapitre 3 Analyse Temporelle Frequentielle SLC PDF
Transféré par
boumehedTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Chapitre 3 Analyse Temporelle Frequentielle SLC PDF
Transféré par
boumehedDroits d'auteur :
Formats disponibles
Chapitre ❸
Chapitre 3: Analyse Temporelle et Fréquentielle d’un SLC
Asservissement & Régulation Page: 25 Propose par: SOYED-Abdessamï
Chapitre ❸
1. Etude d’un Système Linéaire Continu (SLC) de premier ordre
On considère un processus industriel, modélisé par une équation différentielle de premier ordre
ds
de type τ +s=ke(t) ; avec e: entrée, s: sortie, k: gain statique et : constante de temps.
dt
La transformée de Laplace de cette équation différentielle, permet d’obtenir sa fonction de
S(p) k
transfert H(p)= = .
E(p) 1+τp
Exemples : Circuit RC série et circuit RL série
i R i R
e C u e L u
Fig.3.1: Circuits RL et RC série
du
Circuit RC: L’équation différentielle décrivant ce circuit est donnée par e=u+RC , avec
dt
=RC: constante de temps du circuit. On suppose de plus que le condensateur est initialement
déchargé (u(0)=0). La transformée de Laplace de l’équation différentielle permettant d’obtenir sa
U(p) 1
fonction de transfert, qui est exprimée par H(p)= = .
E(p) 1+τp
L di
Circuit RL: L’équation différentielle décrivant ce circuit est donnée par e=i+ , avec
R dt
L
τ= : constante de temps du circuit. On suppose que l’inductance est initialement déchargée
R
(i(0)=0). La transformée de Laplace de l’équation différentielle permet d’obtenir sa fonction de
I(p) 1
transfert H(p)= = .
E(p) 1+τp
Asservissement & Régulation Page: 26 Propose par: SOYED-Abdessamï
Chapitre ❸
Pour le circuit RC série l’entrée et la sortie est une tension. Pour le circuit RL série l’entrée est
une tension, alors que la sortie est un courant. Les (la) conditions initiales sont nulles pour une
grandeur ou ses dérivées d’un système physique, prouve que ce dernier (processus physique) part
de son état de repos ou à partir d’un point de son fonctionnement.
1.1.Analyse temporelle
1.1.1. Réponse Impulsionnelle
Le système de premier ordre est excité par une impulsion de Dirac unitaire (t), sa transformée
de Laplace vaut E(p)=L[δ(t)]=1 , d’ou S(p)=H(p).E(p)
e(t)=δ(t) k s(t)
1+τp
t
k k -
La transformée inverse de Laplace de S(p) est fournie par L-1[S(p)]=L-1[ ]=s(t)= e τ .
(τp+1) τ
1.1.2. Réponse Indicielle
Le système de premier ordre est excité par un échelon unitaire e(t)=u(t), sa transformée de
1
Laplace vaut E(p)=L[u(t)]= ; d’ou S(p)=H(p).E(p) .
P
e(t) u(t) k s(t)
1+τp
Sp k -
t
La transformée inverse de Laplace est fournie par: L-1[ ]=L-1[ ]=s t =k(1- e τ )
p p(τp+1)
Temps de réponse:
On caractérise le régime transitoire de la réponse indicielle, par un temps de réponse (tr). Il est
2
obtenue quand la valeur finale du régime permanent du processus atteint ( ) de la valeur
3
finale d’entrée, elle est donnée par t r =3τ .
Asservissement & Régulation Page: 27 Propose par: SOYED-Abdessamï
Chapitre ❸
Temps de montée:
C’est le temps mis pour que la sortie du processus atteigne 90% de la valeur finale du régime
tm
-
τ
établit. On a donc alors: 0.9k=k(1-e ) , d’ou t m =2.3.τ .
Conclusion:
Si la constante de temps () est faible, par conséquent le temps de réponse (tr) l’est aussi, donc le
système est rapide. Si () est grande, le système est lent.
1.1.3. Réponse à une Rampe
Le système de premier ordre est excité par une rampe unitaire e(t)=r(t). Elle est appelée aussi
1
réponse en vitesse, sa transformée de Laplace vaut E(p)=L[r(t)]= ;d’ou S p =H(p).E(p) .
P2
e(t)=r(t) k s(t)
1+τp
Sp k -
t
La transformée inverse de Laplace est L-1[ ]=L-1[ ]=s t =k(t-τ+τe τ ) .
p2 2
p (1+τp)
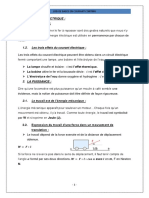
Réponse Impulsionnelle
1
Sortie s
0.5
0
0 2 4 6 8 10
Systeme de Premier Ordre
Réponse Indicielle
1
Entrée e
Sortie s
0.5
0
0 2 4 6 8 10
Réponse à une rampe
10
entrée e
sortie s
5
0
0 2 4 6 8 10
Temps(s)
Fig.3.2: Réponse à une δ(t) , à un u(t) et une r(t) d’un système de premier ordre
Asservissement & Régulation Page: 28 Propose par: SOYED-Abdessamï
Chapitre ❸
La réponse à une rampe présente une erreur de traînage. On voit que si ( k 1 ), la sortie ne suit
pas l’entrée. On dit qu’elle traîne. L’écart s’agrandit régulièrement et à la limite devient infini.
L’erreur de traînage vaut: ε T =k.τ
Conclusions:
Un système du premier ordre ne suit pas en vitesse.
Un système du premier ordre est donc stable.
1.2.Analyse harmonique
Cette analyse est nommée aussi analyse fréquentielle, c'est-à-dire que le système de premier
ordre est excité par un signal sinusoïdal. Il suffit de remplacer l’opérateur de Laplace par (jw) .
k 1
La fonction de transfert s’écrit alors H jw = ; avec w c = : appelle pulsation de coupure.
1+jτ w τ
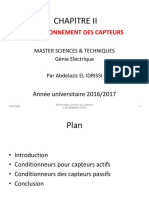
1.2.1. Diagramme de Bode
Il consisté à tracer deux courbes de la fonction complexe ( H(jw) ), le module et la de phase en
fonction de fréquences (pulsations). Ils sont donnes par:
k
H(jw) = w 2
1+( )
wc
w
φ=arg(H(jw)=-arctan( )
w c
Soit en décibel (échelle semi-logarithmique), pour faciliter l’allure des courbes, et sont donnés
par:
w 2
Hdb =20.Log(k)-10.Log[1+( w ) ]
c
φ=arg(H(jw)=-arctan( w )
wc
Asservissement & Régulation Page: 29 Propose par: SOYED-Abdessamï
Chapitre ❸
Bode Diagram
0
-10
Magnitude (dB)
-20
-30
-40
-50
-60
0
Phase (deg)
-45
-90
-2 -1 0 1 2
10 10 10 10 10
Frequency (rad/s)
Fig.3.3: Diagramme de Bode d’un système de premier ordre
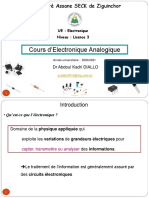
1.2.2. Diagramme de Black-Nichols
Il consiste à tracer une seule courbe, le module en fonction de l’argument d’une fonction de
transfert d’un processus, pour des pulsations orientées et graduées H db =f(φ) . On peut déduire
plusieurs paramètres d’un système en boucle fermée à partir d’une fonction de transfert en
boucle ouverte.
Asservissement & Régulation Page: 30 Propose par: SOYED-Abdessamï
Chapitre ❸
Nichols Chart
40
0 dB
30 0.25 dB
0.5 dB
20 1 dB -1 dB
10 3 dB
6 dB -3 dB
Open-Loop Gain (dB)
0 -6 dB
-10 -12 dB
-20 -20 dB
-30
-40 -40 dB
-50
-60 dB
-60
-360 -315 -270 -225 -180 -135 -90 -45 0
Open-Loop Phase (deg)
Fig.3.4: Diagramme de Black d’un système de premier ordre
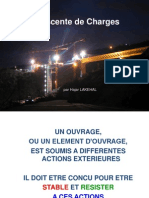
1.2.3. Diagramme de Nyquist
Il consiste à tracer dans le même plan, la partie imaginaire en fonction de la partie réelle d’une
fonction de transfert d’un processus. C’est un diagramme qui contient aussi l’allure du module
en fonction de l’argument (phase) de cette même fonction de transfert, pour une pulsation qui
varie de zéro à l’infini.
Asservissement & Régulation Page: 31 Propose par: SOYED-Abdessamï
Chapitre ❸
Nyquist Diagram
0.5
6 dB4 dB 2 dB 0 dB -2 dB -4 dB -6 dB
0.4
-10 dB
10 dB
0.3
System: g
Real: 0.11
0.2
Imag: 0.313
Frequency (rad/s): -2.85
20 dB -20 dB
0.1
Imaginary Axis
-0.1
-0.2
-0.3
-0.4
-0.5
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Real Axis
Fig.3.5: Diagramme de Nyquist d’un système de premier ordre
Conclusions:
Un système du premier ordre est un filtre passe-bas,
Un système rapide est un système qui a une bande passante large (faible constante de temps),
Un système lent est un système qui possède une bande passante étroite.
Asservissement & Régulation Page: 32 Propose par: SOYED-Abdessamï
Chapitre ❸
2. Etude du Système Linéaire Continu (SLC) de deuxième ordre
Un processus industriel peut être décrit par une équation différentielle de deuxième ordre de
d 2s ds
type a 2 2
+a1 +a 0s=b0 e(t) ; avec e: entrée et s: sortie et ( a 2 ; a1 ; a 0 ; b 0 ) étant les paramètres
dt dt
constants du processus.
La transformée de Laplace de l’équation différentielle précédente (toutes les conditions initiales
sont nulles), permet d’obtenir sa fonction de transfert:
b0
Sp b0 a2
H p = = 2
= .
E p a 2 p +a1 p +a 0 p2 + a1 p + a 0
a2 a2
k.w 20
La transmittance canonique est fournie par H p =
p 2 +2mw 0 .p+w 20
Il suffit comparer les deux expressions, pour identifier les coefficients caractérisant la fonction
de transfert canonique:
b0
k= : Gain statique,
a0
a0
w0 = : Pulsation propre,
a2
a1
m= : Coefficient d'amortissement.
2 a 0a 2
Asservissement & Régulation Page: 33 Propose par: SOYED-Abdessamï
Chapitre ❸
Circuit RLC série:
R L
i
e C s
Fig.3.6: Circuits RLC série
Ce circuit est décrit par une équation différentielle de deuxième ordre de
d 2s R ds 1 e
type 2
+ + s= . Elle peut être mise sous sa forme canonique (les conditions initiales
dt L dt LC LC
d 2s ds
sont nulles) 2
+2mw 0 +w 02s=w 02 e .
dt dt
1
w0 = : Pulsation propre du système (rad/s),
LC
R C
m= : Facteur d’amortissement sans dimensions,
2 L
L
τ= : Constante de temps(s),
R
1 1 L
Q= = =τw 0 : Facteur de qualité.
2m R C
S(p) kw 20
Par conséquent la transmittance de circuit est donné par H(p)= = 2 .
E(p) p +2mw 0 p+w 02
E(p) kw 20 S(p)
p +2mw 0 p+w 02
2
Asservissement & Régulation Page: 34 Propose par: SOYED-Abdessamï
Chapitre ❸
2.1.Solutions de l’équation du système du 2eme ordre
Elle admet une équation caractéristique p 2 +2mw 0 .p+w 02 =0 , son discriminant est Δ=4(m2 -1)w 02 .
2.1.1. Cas du régime apériodique (m>1):
Pour ce régime l’équation caractéristique admet deux racines réelles négatives:
1 1
p12 =-w 0 (m± m 2 -1) , si de plus on pose τ1 = et τ 2 = >τ1 .
P1 p2
2.1.2. Cas du régime pseudopériodique (m< 1):
Pour ce régime l’équation caractéristique admet deux racines complexes conjuguées:
1 1
p1 =p 2 =- +jw , avec τ= et w p =w 0 1-m 2 .
τ mw 0
wp: Pseudo pulsation (rad/s),
: Temps de relaxation, caractérise la durée des phénomènes transitoires.
2.1.3. Cas du régime critique (m=1):
1
Pour ce régime critique, l’équation caractéristique admet une racine double p1 =p 2 =-w 0 =- .
τ
Asservissement & Régulation Page: 35 Propose par: SOYED-Abdessamï
Chapitre ❸
2.2.Etude de la réponse temporelle d’un système 2eme ordre
2.2.1. Coefficients d’amortissement (m>1)
Réponse Impulsionnelle:
La transformé de Laplace de l’entrée L δ(t) =E(p)=1 . Sa réponse vaut alors:
k k 1 1
S(p)=H(p)E(p)= =( )[ - ] , donc la réponse temporelle est
(1+τ1p)(1+τ 2 p) τ1 -τ 2 (p+ 1 ) (p+ 1 )
τ1 τ2
t t
k - -
donnée par s(t)= [e τ1 -e τ 2 ] .
τ1 -τ 2
Réponse indicielle:
1
La transformé de Laplace de l’entrée L u(t) =E(p)= . Sa réponse vaut alors:
p
k 1 τ 1 τ 1
S(p)=H(p)E(p)= =k[ -( 1 ) +( 2 ) ].
p(1+τ1p)(1+τ 2 p) p τ1 -τ 2 (p+ ) τ1 -τ 2 (p+ 1 )
1
τ1 τ2
t t
τ1 - τ1 τ -
Il s’ensuit la réponse temporelle est donnée par s(t)=k(1- e + 2 e τ2 ) .
τ1 -τ 2 τ1 -τ 2
Réponse à une rampe:
1
La transformé de Laplace de l’entrée L r(t) =E(p)= . Sa réponse vaut alors:
p2
k 1 τ1 +τ 2 1 τ12 τ22
S(p)=H(p).E(p)= =k[ - + .( - )] . Il s’ensuit que la
p 2 (1+τ1p)(1+τ 2 p) p2 p τ1 -τ 2 (p+ 1 ) (p+ 1 )
τ1 τ2
t t
1 - -
réponse temporelle est donnée par s(t)=k.[t- τ1 +τ 2 + (τ12e τ1 -τ 22e τ2 )] .
τ1 -τ 2
L’erreur de trainage c’est l’écart entre l‘entrée et la sortie: ε T =k. τ1 +τ2 .
Asservissement & Régulation Page: 36 Propose par: SOYED-Abdessamï
Chapitre ❸
4
Fonction de transfert: H(p)= 2
p +6p+4
Réponse Impulsionnelle
1
Sortie s
0.5
Systeme de Deuxiemme ordre (m>1)
0
0 2 4 6 8 10
Réponse Indicielle
1
Entrée u
Sortie s
0.5
0
0 2 4 6 8 10
Réponse à une Rampe)
10
Entrée r
Sortie s
5
0
0 2 4 6 8 10
Temps(s)
Fig.3.7: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m>1)
2.2.2. Coefficient d’amortissement (m=1)
Réponse Impulsionnelle:
La transformée de Laplace de l’entrée L δ(t) =E(p)=1 . Sa réponse vaut alors:
t
k k -τ
S(p)=H(p).E(p)= , il s’ensuit que la réponse temporelle est donnée par s(t)= t.e .
(1+τp) 2 τ
Réponse Indicielle:
1
La transformée de Laplace de l’entrée L u(t) =E(p)= . Sa réponse vaut alors:
p
k 1 τ τ
S(p)=H(p).E(p)= 2
=k[ - - ] . Il s’ensuit que la réponse temporelle est
p(1+τp) p (1+τp) (1+τp) 2
t t
- t -
donnée par s(t)=k.(1-e τ - e τ ) .
τ
Asservissement & Régulation Page: 37 Propose par: SOYED-Abdessamï
Chapitre ❸
Réponse à une Rampe:
1
La transformée de Laplace de l’entrée r L r(t) =E(p)= . Sa réponse vaut alors:
p2
k 1 2τ 2τ 2 τ2
S(p)=H(p).E(p)= =k.[ - + + ].
p 2 (1+τp) 2 p 2 p (1+τp) (1+τp) 2
t
-
Il s’ensuit que la réponse temporelle est donnée par s(t)=k[t-2τ+ t-2τ e ] . τ
L’erreur de traînage vaut alors ε T =k.2τ .
4
Fonction de transfert: H(p)=
(p+2)2
Réponse Impulsionnelle
1
Sortie s
0.5
Systeme de Deuxiemme ordre (m=1)
0
0 2 4 6 8 10
Réponse Indicielle
1
Entrée u
Sortie s
0.5
0
0 2 4 6 8 10
Réponse à une Rampe)
10
Entrée r
Sortie s
5
0
0 2 4 6 8 10
Temps(s)
Fig.3.8: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m=1)
Asservissement & Régulation Page: 38 Propose par: SOYED-Abdessamï
Chapitre ❸
2.2.3. Coefficient d’amortissement (m<1)
Réponse Impulsionnelle:
La transformée de Laplace de l’entrée Lδ(t)=E(p)=1. Sa réponse vaut alors:
kw 20
S p = . Il s’ensuit que la réponse temporelle est donnée par :
p 2 +2mw 0 p+w 02
kw 0e-mw0 .t
s(t)= sin(w 0 1-m 2 .t)
2
1-m
.Réponse Indicielle:
1
La transformée de Laplace de l’entrée L u(t) =E(p)= , sa réponse vaut alors :
p
kw 20 1 p+2mw 0
S p = 2 2
=k.[ - 2 ] . Il s’ensuit que la réponse temporelle est
p(p +2mw 0 p+w 0 ) p p +2mw 0 p+w 02
-mw 0 .t
e m
donnée par s(t)=k.[1- cos(w 0 1-m 2 .t-φ)] , avec φ=arctan( )
1-m 2 1-m 2
La réponse indicielle est donc oscillatoire amortie, elle est caractérisée par cinq paramètres:
Le temps de montée: tm,
Le temps de réponse: tr,
Le temps de pic: tpic,
Le premier dépassement: D,
La pseudo-période: Tp.
Asservissement & Régulation Page: 39 Propose par: SOYED-Abdessamï
Chapitre ❸
16
14
D
12
10
Amplitude
6 Tp
2
tpic
0
0 tm 1 2 3 4 5 6 7 8 9 10
t(s)
Fig.3.9: Dépassement, temps de pic et temps de monté
Réponse à un u(t) d’un système de 2eme ordre (m|<1)
Calcul du temps de montée:
C'est le temps qui met le système pour atteindre la valeur finale, c’est à dire s(t) atteint la valeur
mw 0 t m
e-
k, soit encore: k[1- cos(w 0 1-m 2 .t m -φ)]=k , donc cos(w 0 1-m 2 .t m -φ)=0 .
2
1-m
π
D’où w 0 1-m 2 .t m -φ= +2nπ ; (n Z ) . Pour (n = 0), on obtient le temps de montée:
2
1 π m
tm = [ -arctan( )] .
w0 1-m 2 2
1-m 2
Calcul du temps de pic:
ds
La dérivée de la réponse du système ( =0 ) permet de déterminer les extremums, donc les
dt
valeurs de temps qui correspondent à la réponse de s(t).
-mw 0 t
ds kw 0e
= [m.cos(w 0 1-m2 .t-φ)+ 1-m 2 .sin(w 0 1-m 2 .t-φ)]=0 .
dt 1-m 2
Asservissement & Régulation Page: 40 Propose par: SOYED-Abdessamï
Chapitre ❸
Soit encore [m.cos(w 0 1-m 2 t-φ)+ 1-m 2 .sin(w 0 1-m2 t-φ)]=0 .
nπ π
Donc t n = . Le temps de pic s’obtiendra pour n=1: t pic = .
2
w 0 1-m w 0 . 1-m 2
Calcul de dépassement:
Il suffit de remplacer le temps (t= tn) dans s(t), pour trouver les dépassements:
nmπ
-
1-m2
e
s(t n )=k[1- cos(nπ-φ)]
1-m2
nmπ
-
1-m 2
Les valeurs minimales de s(t) s’obtient si n est impaire: s(t n )min =k[1-e ].
nmπ
-
1-m2
Les valeurs maximales de s(t) s’obtient si n est paire: s(t n )max =k[1+e ].
Le premier dépassement s’obtient pour (n = 1), on a obtient alors:
mπ
-
s(t1 )max -k 1-m 2
D%=100.( )=100.e .
k
Calcul de pseudo période:
C'est le temps qui sépare deux maximums successifs (ou deux minimums successifs):
2π
Tp =
w 0 1-m 2
Calcul de temps de réponse:
Le temps de réponse (tr) est le temps au bout duquel la sortie atteint son régime permanent à 5%,
il est décrit par les deux équations suivantes:
e-mw 0 t m
[ cos(w 0 1-m 2 .t-arctan( )] 5% ; m 1
2
1-m 1-m 2
-
t
-
t
τ1e τ1 τ 2e τ2
[ - ] 5% ; m 1
τ1 -τ 2 τ1 -τ 2
Asservissement & Régulation Page: 41 Propose par: SOYED-Abdessamï
Chapitre ❸
Tableau récapitulatif
1 π m
Temps de montée tm = [ -arctan( )]
w0 1-m 2 2
1-m 2
π
Temps de pic t pic =
w 0 1-m 2
mπ
-
Premier dépassement 1-m2
D%=100.e
2π
Pseudo-période Tp =
w 0 1-m 2
2 100 m1
Temps de réponse réduit à n% ( m< t r w 0 =Log( )
2 n
1
tm = [π-arccos(m)]
w 0 1-m 2
On utilise l’abaque de la figure ci-dessous:
Fig.3.10:Temps de réponse réduit en fonction de facteur t r .w 0 =f(m) pour (m<1 et m 1)
Asservissement & Régulation Page: 42 Propose par: SOYED-Abdessamï
Chapitre ❸
Réponse d’un système de 2eme ordre à une Rampe:
1
La transformé de Laplace de l’entrée L r(t) =E(p)= . Sa réponse vaut alors:
p2
2m
p+4m 2 -1
2
kw 1 2m w0
S p = =k[ 2 - + 0
].
p(p 2 +2mw 0 p+w 20 ) p w 0 p (p+mw 0 ) 2 +w 20 (1-m) 2
Il s’ensuit que la réponse temporelle est donnée par:
2m e-mw 0 .t
s(t)=k t- -
w 0 w 0 1-m 2
cos w 0 1-m 2 .t-arctan(2m 1-m 2 )
2.k.m
L’erreur de traînage vaut alors: ε T = .
w0
1
Fonction de transfert: H(p)= 2
p +0.4p+1
Réponse Impulsionnelle
1
Sortie s
0
Systeme de Deuxiemme ordre (m<1)
-1
0 5 10 15 20
Réponse Indicielle
2
Entrée u
Sortie s
1
0
0 5 10 15 20
Réponse à une Rampe)
20
Entrée r
Sortie s
10
0
0 5 10 15 20
Temps(s)
Fig.3.10: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m<1)
Asservissement & Régulation Page: 43 Propose par: SOYED-Abdessamï
Chapitre ❸
2.3.Analyse harmonique d’un système de deuxième ordre
La fonction de transfert harmonique d'un système du second s’obtient, en remplaçant l’opérateur
kw 02 k
par ( p=jw ). On a donc H(jw)= =
w 0 +2jmww 0 +(jww 0 ) 1-( w ) 2 +2 m j w
2 2
w0 w0
Le module et l'argument de H(jw) sont donnés par:
w
2 m( )
k w0
H(jw) = et arg H(jw) =-arctan
2
w 2 w
2
1-( w )2
1-( ) + 2m w 0
w0 w0
Caractéristiques du système de 2 e ordre:
d H(jw)
La dérivée du module ( =0 ) s’annule pour les valeurs suivantes:
dw
1
Une seule racine: w= 0 si m
2
1
Deux racines: w=0 et w=w 0 1-2 m2 si m<
2
Pulsation et facteur de résonance:
1
Pour ( m 0.7 ) on a w R =w 0 1-2m 2 : appelée pulsation de résonance, elle est inférieure à
2
k
la pulsation propre non amortie. L'amplitude de résonance est donné par H(jw) max = .
2 m 1-m 2
H(jw) max 1
Le facteur de résonance est définit par M= = .
k 2 m 1-m2
Asservissement & Régulation Page: 44 Propose par: SOYED-Abdessamï
Chapitre ❸
Pulsation de coupure:
Pour un gain à -3dB, ce qui correspond à une division par 2 du gain statique naturelle.
k k
On a donc H(jw) = = . La solution de cette équation donne la
2 2
w 2 w 2
1-( ) + 2m
w0 w0
2
pulsation de coupure w c =w 0 . 1-2m2 + 2m -12
+1 .
Phase :
Le déphasage de la fonction de transfert H(jw) est donnée par:
w
2m( w )
φ=arg H(jw) =-arctan 0
1-( w ) 2
w 0
2
2.3.1. Diagrammes fréquentielles pour ( m< )
2
Diagramme de Bode:
Bode Diagram
20
0
Magnitude (dB)
-20
-40
-60
-80
0
-45
Phase (deg)
-90
-135
-180
-1 0 1 2
10 10 10 10
Frequency (rad/s)
Asservissement & Régulation Page: 45 Propose par: SOYED-Abdessamï
Chapitre ❸
Diagramme de Black-Nichols:
Nichols Chart
40
0 dB
30 0.25 dB
0.5 dB
20 1 dB -1 dB
10 3 dB
6 dB -3 dB
Open-Loop Gain (dB)
0 -6 dB
-10 -12 dB
-20 -20 dB
-30
-40 -40 dB
-50
-60 dB
-60
-360 -315 -270 -225 -180 -135 -90 -45 0
Open-Loop Phase (deg)
Diagramme de Nyquist:
Nyquist Diagram
2
0 dB -2 dB
1.5
2 dB
-4 dB
1
4 dB
-6 dB
6 dB
0.5 -10 dB
10 dB
Imaginary Axis
20 dB -20 dB
0
-0.5
-1
-1.5
-2
-1 -0.5 0 0.5 1 1.5
Real Axis
Asservissement & Régulation Page: 46 Propose par: SOYED-Abdessamï
Chapitre ❸
2
2.3.2. Diagrammes fréquentielles pour ( m> )
2
Diagramme de Bode:
Bode Diagram
0
Magnitude (dB) -20
-40
-60
-80
0
-45
Phase (deg)
-90
-135
-180
-2 -1 0 1 2
10 10 10 10 10
Frequency (rad/s)
Diagramme de Black-Nichols:
Nichols Chart
40
0 dB
0.25 dB
0.5 dB
20 1 dB -1 dB
3 dB
6 dB -3 dB
0 -6 dB
Open-Loop Gain (dB)
-12 dB
-20 -20 dB
-40 -40 dB
-60 -60 dB
-80 dB
-80
-180 -135 -90 -45 0 45 90 135 180
Open-Loop Phase (deg)
Asservissement & Régulation Page: 47 Propose par: SOYED-Abdessamï
Chapitre ❸
Diagramme de Nyquist:
Nyquist Diagram
0.8
4 dB 2 dB 0 dB -2 dB -6 dB -4 dB
0.6 6 dB
0.4 -10 dB
10 dB
0.2
Imaginary Axis
20 dB -20 dB
-0.2
-0.4
-0.6
-0.8
-1 -0.5 0 0.5 1 1.5
Real Axis
Asservissement & Régulation Page: 48 Propose par: SOYED-Abdessamï
Vous aimerez peut-être aussi
- Chapitre 1 - Systèmes AsservisDocument10 pagesChapitre 1 - Systèmes AsservisSif eddinePas encore d'évaluation
- Exofiltres PDFDocument2 pagesExofiltres PDFOthman RaisPas encore d'évaluation
- CHAPITRE3Document34 pagesCHAPITRE3Bilal Cros100% (1)
- ASSER Cours - Valider Les Performances Globales D'un Système PDFDocument66 pagesASSER Cours - Valider Les Performances Globales D'un Système PDFhamza maaroufiPas encore d'évaluation
- Transistors Bipolaires - en Ligne PDFDocument28 pagesTransistors Bipolaires - en Ligne PDFThouraya Haj HssanPas encore d'évaluation
- CC1 Electr Anal Novembre 2017 Avec SolutionDocument8 pagesCC1 Electr Anal Novembre 2017 Avec SolutionAyman HamzaPas encore d'évaluation
- Correction Asservissement Freinage CCP MP 2007Document4 pagesCorrection Asservissement Freinage CCP MP 2007Pierre Fidalgo50% (2)
- Electrotechnique Fond1 - NebtiDocument32 pagesElectrotechnique Fond1 - NebtiTtabi VeydiPas encore d'évaluation
- Travaux Diriges Ndeg1Document5 pagesTravaux Diriges Ndeg1Martin KangaPas encore d'évaluation
- Courant Alternatif Monophasé-CoursDocument11 pagesCourant Alternatif Monophasé-CoursBouba SeckPas encore d'évaluation
- ELN - TP2 - BOULANOUAR SarraDocument23 pagesELN - TP2 - BOULANOUAR SarraBOULANOUAR SarraPas encore d'évaluation
- Cours Circuit MagnetiqueDocument6 pagesCours Circuit MagnetiqueSif eddinePas encore d'évaluation
- EleDocument25 pagesEleRebahi FaresPas encore d'évaluation
- Chapitre 2 Applications Des Amplificateurs OperationnelsDocument20 pagesChapitre 2 Applications Des Amplificateurs OperationnelswalidjafPas encore d'évaluation
- Puissance DeformanteDocument17 pagesPuissance DeformantetliarPas encore d'évaluation
- Exercice Corrigé Transformation de Laplace PDFDocument25 pagesExercice Corrigé Transformation de Laplace PDFArsène KekpenaPas encore d'évaluation
- Lois de Bases en Courant ContinuDocument7 pagesLois de Bases en Courant ContinuBabacar TounkaraPas encore d'évaluation
- Gradateurs PrincipesDocument5 pagesGradateurs PrincipesAhmed TaharPas encore d'évaluation
- Examen1 Electronique Fondamentale 1 2021Document2 pagesExamen1 Electronique Fondamentale 1 2021Arounan DembelePas encore d'évaluation
- Fiche Transformée de Laplace 2010-2011 RDocument4 pagesFiche Transformée de Laplace 2010-2011 RRodrigue patrice Njounhassi koagnePas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1The AlgerianmanPas encore d'évaluation
- CH2 ConditionneursDocument54 pagesCH2 ConditionneursIssam NassiriPas encore d'évaluation
- Module 7 Lois de KirchhoffDocument5 pagesModule 7 Lois de KirchhoffHamza_AKPas encore d'évaluation
- Resume STS2 15 Machine SynchroneDocument5 pagesResume STS2 15 Machine SynchroneMOHAMMED AMINE AMLILAPas encore d'évaluation
- GELE3132 Ch1Document18 pagesGELE3132 Ch1Faïssolath AchirouPas encore d'évaluation
- Ch4 Méthode Des Courants de MailleDocument6 pagesCh4 Méthode Des Courants de MaillellagrangPas encore d'évaluation
- Lois Generales Electricite - Doc Lois Generales ElectriciteDocument0 pageLois Generales Electricite - Doc Lois Generales ElectriciteHilda OrtizPas encore d'évaluation
- Régime Sinusoïdal 2018 - Partie 1 - ROGEDocument46 pagesRégime Sinusoïdal 2018 - Partie 1 - ROGEEsli AmbinintsoaPas encore d'évaluation
- TD5 - Electronique de PuissanceDocument3 pagesTD5 - Electronique de PuissanceMOHAMED ACHLIOUIPas encore d'évaluation
- Chap1redresseurs 231011183554 Fea50d0bDocument18 pagesChap1redresseurs 231011183554 Fea50d0bbourkaibabdou20022Pas encore d'évaluation
- Cours Oscill Elect ForcéesDocument7 pagesCours Oscill Elect ForcéesSdiri JamelPas encore d'évaluation
- Automate ProgDocument7 pagesAutomate ProgHans lionel ABAGHA ELLAPas encore d'évaluation
- TransistorsDocument12 pagesTransistorslilasaid2010Pas encore d'évaluation
- CH 3 Redressement Non CommandéDocument14 pagesCH 3 Redressement Non Commandécharletb toubiaPas encore d'évaluation
- 1 Analogie HydrauliqueDocument4 pages1 Analogie HydrauliquemichelchaPas encore d'évaluation
- Examen de Rattrapage+solution 2020-2021 PDFDocument3 pagesExamen de Rattrapage+solution 2020-2021 PDFIsmail EssPas encore d'évaluation
- Eq de Puissance - Cours - Datashow MN Cours PDFDocument105 pagesEq de Puissance - Cours - Datashow MN Cours PDFZaynabBenAbdelhadi100% (1)
- Analyse Har MoniqueDocument16 pagesAnalyse Har MoniqueSahliMohamedPas encore d'évaluation
- Corrige Chap3 Exo1Document2 pagesCorrige Chap3 Exo1Said ZaidiPas encore d'évaluation
- Transistor Pemière Partie 1Document14 pagesTransistor Pemière Partie 1Mohamed FoudalPas encore d'évaluation
- Cours Jauge ContrainteDocument6 pagesCours Jauge Contrainteعمر الفاروقPas encore d'évaluation
- Chap2 - TS: Cours Traitement de Signal - IsecsDocument33 pagesChap2 - TS: Cours Traitement de Signal - IsecsBakir Fatma100% (1)
- TP RedresssementDocument9 pagesTP RedresssementKereme JulienPas encore d'évaluation
- Cours Diodes L3Ph 2020-21Document69 pagesCours Diodes L3Ph 2020-21Ass SidibePas encore d'évaluation
- Controle EnkjDocument2 pagesControle EnkjFurious ZouhairPas encore d'évaluation
- TleC - PHY - L13 - Circuit RLC en Régime Sinusoïdal ForcéDocument11 pagesTleC - PHY - L13 - Circuit RLC en Régime Sinusoïdal ForcéElie SiwePas encore d'évaluation
- Travaux Diriges N1 de Signaux Physiques-2 PDFDocument4 pagesTravaux Diriges N1 de Signaux Physiques-2 PDFBoris Emmanuel AssemienPas encore d'évaluation
- Eln InstrumentationDocument27 pagesEln InstrumentationMarquiz DitchiPas encore d'évaluation
- 4462288Document4 pages4462288elkamous youssefPas encore d'évaluation
- Ex Regul AsservDocument7 pagesEx Regul Asservjaouad_ker100% (1)
- Sys Ordre IDocument5 pagesSys Ordre IRahal karimPas encore d'évaluation
- Etude Temporel Des SystèmesDocument10 pagesEtude Temporel Des Systèmesdonald youngouaPas encore d'évaluation
- TP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreDocument16 pagesTP N°01 Analyse Temporelle D'un Syst'eme Dynamique Du 1er OrdreSamy BOUARROUPas encore d'évaluation
- Chapitre 1 TLDocument13 pagesChapitre 1 TLmaymoun jabnouniPas encore d'évaluation
- Systèmes Du Premier Ordre PDFDocument7 pagesSystèmes Du Premier Ordre PDFtrawri007Pas encore d'évaluation
- Cours Filtrage AnalogiqueDocument11 pagesCours Filtrage AnalogiqueJuste KibaPas encore d'évaluation
- Chap 3 AutDocument12 pagesChap 3 AutAyoub AkoucharPas encore d'évaluation
- Régulation CH03Document11 pagesRégulation CH03Abd HRPas encore d'évaluation
- TP 01Document6 pagesTP 01kima lachgarPas encore d'évaluation
- Emotion Et ApgeDocument117 pagesEmotion Et ApgeYosra MoncerPas encore d'évaluation
- Chap 1Document5 pagesChap 1Ahmedou HacenPas encore d'évaluation
- M45P501Document3 pagesM45P501oiopPas encore d'évaluation
- Chapter 2Document12 pagesChapter 2mouadh mimouniPas encore d'évaluation
- TD PolynomesDocument1 pageTD PolynomesKhalil KhilouPas encore d'évaluation
- Badache & BalguendouzeDocument142 pagesBadache & BalguendouzeAhmed GabiPas encore d'évaluation
- 16 - L'atome Et La Mécanique de NewtonDocument4 pages16 - L'atome Et La Mécanique de Newtonyoussefoutter22Pas encore d'évaluation
- C5 Chap1 TD1Document3 pagesC5 Chap1 TD1djalikadjouPas encore d'évaluation
- Present Abaqus LP 030307Document53 pagesPresent Abaqus LP 030307Mokhtar Zemri100% (1)
- 2019-2020 2nde CH2 Vecteurs Exs Construction EvalDocument1 page2019-2020 2nde CH2 Vecteurs Exs Construction EvalTony YvardPas encore d'évaluation
- Chapitre - 5 - Transformation 2Document5 pagesChapitre - 5 - Transformation 2léaPas encore d'évaluation
- Couple Outil-Piece 3Document4 pagesCouple Outil-Piece 3Mohamed Abed100% (1)
- 1) Le Risque ÉlectriqueDocument47 pages1) Le Risque Électriquekadam moustaphaPas encore d'évaluation
- Une Conception Sociale Cognitive de L'orientation Scolaire Et Professionnelle Considérations Théoriques Et PRDocument24 pagesUne Conception Sociale Cognitive de L'orientation Scolaire Et Professionnelle Considérations Théoriques Et PRFaysal BadriPas encore d'évaluation
- CAPTEURSDocument10 pagesCAPTEURSIgor DjodaPas encore d'évaluation
- Cours A Mettre en Ligne Absorption Atomique FinalDocument5 pagesCours A Mettre en Ligne Absorption Atomique FinalIslam BenhabilesPas encore d'évaluation
- Tassement Et ConsolidationDocument19 pagesTassement Et ConsolidationBamogo DrissaPas encore d'évaluation
- Descente de ChargesDocument10 pagesDescente de ChargesbensofienPas encore d'évaluation
- TP TassementDocument7 pagesTP TassementMOSTEFA FouziaPas encore d'évaluation
- Chapitre 8 Analyse FonctionnelleDocument36 pagesChapitre 8 Analyse FonctionnelleKOUAKOU YAH MARDOCHEEPas encore d'évaluation
- Les Fatigues de CoqueDocument39 pagesLes Fatigues de CoqueAimen Ferroum100% (2)
- AcrotereDocument22 pagesAcrotereMourad Taj71% (7)
- Catalogue Apageo FRDocument140 pagesCatalogue Apageo FRramzi0% (1)
- Chapitre 1dDocument16 pagesChapitre 1dBen amara AzizPas encore d'évaluation
- 1P003 C10 Changement de Phase 2018Document17 pages1P003 C10 Changement de Phase 2018walidPas encore d'évaluation
- Générateur de VaguesDocument3 pagesGénérateur de VaguesAxel GonzalezPas encore d'évaluation
- Chapitre 2 Modélisation Mathématique Des Systèmes AsservisDocument11 pagesChapitre 2 Modélisation Mathématique Des Systèmes AsservisSmati DjamelPas encore d'évaluation
- Mémoire de Fin D'étude Master 2019 MCP UKMO Fichier PDFDocument66 pagesMémoire de Fin D'étude Master 2019 MCP UKMO Fichier PDFChaoune MedPas encore d'évaluation
- Efficacité Energétique Dans Le Secteur Industriel-Manuel de L'élève PDFDocument94 pagesEfficacité Energétique Dans Le Secteur Industriel-Manuel de L'élève PDFMehdiToukiPas encore d'évaluation
- Spectr Vibr 2Document19 pagesSpectr Vibr 2dody1988Pas encore d'évaluation