Vous aimerez peut-être aussi
- Physique Quantique 1Document325 pagesPhysique Quantique 1Dima FontainePas encore d'évaluation
- Exercices Résolus Convection InterneDocument7 pagesExercices Résolus Convection InterneToufik Dahmane75% (4)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Revision Elements Cahier Des ChargesDocument3 pagesRevision Elements Cahier Des ChargesSamir Tah100% (1)
- 13 Statique CoursGJDocument6 pages13 Statique CoursGJRadwane LourhmatiPas encore d'évaluation
- CAP Zéro Coupe Tube - 2020Document4 pagesCAP Zéro Coupe Tube - 2020Rodolphe SounouPas encore d'évaluation
- Correction Cahier La+Projection+ 2016 Prof PDFDocument6 pagesCorrection Cahier La+Projection+ 2016 Prof PDFIyedPas encore d'évaluation
- EPREUVE DE DESSIN 2F5 N2 YonaDocument1 pageEPREUVE DE DESSIN 2F5 N2 YonaThierry roland UmPas encore d'évaluation
- TD 4Document7 pagesTD 4MustaphaPas encore d'évaluation
- DT Perforateur REXELDocument16 pagesDT Perforateur REXELdianecortadesPas encore d'évaluation
- 2 Exercice Corrigé Dessin Technique NormesDocument2 pages2 Exercice Corrigé Dessin Technique NormesAly GAMALEDDYNPas encore d'évaluation
- 3e C11 Cours TrigonométrieDocument4 pages3e C11 Cours TrigonométrieGabriel BdmPas encore d'évaluation
- Schema Cinematique Pompe ManuelleDocument1 pageSchema Cinematique Pompe ManuelleAbdel ElouaerPas encore d'évaluation
- Progression 2013-2014 PF3 Circuit Anal.Document8 pagesProgression 2013-2014 PF3 Circuit Anal.Alain Geoffroy0% (1)
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDocument8 pagesSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkPas encore d'évaluation
- DS1 1Document11 pagesDS1 1Wissal GuilloulPas encore d'évaluation
- KKDocument4 pagesKKYassin BCPas encore d'évaluation
- 02 Bac 2008 Contrôle CorrigéDocument12 pages02 Bac 2008 Contrôle CorrigéMohamed AbedPas encore d'évaluation
- devoir2AS Cotation Manivelle2Document2 pagesdevoir2AS Cotation Manivelle2samsoum2004295250% (2)
- 1 Guide Méthodologique Bepc BacDocument29 pages1 Guide Méthodologique Bepc BacGeezus GarybrahimovicPas encore d'évaluation
- M1 Examen Synthese Semestre 2 Be Et Construction 2020 2021Document8 pagesM1 Examen Synthese Semestre 2 Be Et Construction 2020 2021Daniel Ndong OndoPas encore d'évaluation
- PDF - Cours6Document23 pagesPDF - Cours6Simon Houde100% (1)
- Normes de Dessin TechniqueDocument22 pagesNormes de Dessin TechniqueChaker ChaoualPas encore d'évaluation
- TP2 EnergetiqueDocument35 pagesTP2 EnergetiqueAnonymous 24lnhhPas encore d'évaluation
- AssemblagesDocument37 pagesAssemblagesmom bakkouchPas encore d'évaluation
- Contarainte D'antérioritéDocument16 pagesContarainte D'antérioritéMajed NesrinePas encore d'évaluation
- Statique GraphiqueDocument16 pagesStatique GraphiqueEl Youbi MohammedPas encore d'évaluation
- Syllabus de Cours Gem 301Document3 pagesSyllabus de Cours Gem 301Aristide DOSSOUPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11Pas encore d'évaluation
- Progr WAMBA + Plan TECHNO CONST-2019-2020Document4 pagesProgr WAMBA + Plan TECHNO CONST-2019-2020Christian NoelPas encore d'évaluation
- TD CompresseurDocument7 pagesTD CompresseurNaoufel FaresPas encore d'évaluation
- Sujets Premiere IHDocument2 pagesSujets Premiere IHChancelin KeukouaPas encore d'évaluation
- Fiche Projection Orthogonale (Stage)Document22 pagesFiche Projection Orthogonale (Stage)mohamed fall100% (1)
- Guide de Planification Du Cours de Mécanique Appliquée en Première E, F1, MA, MEMDocument33 pagesGuide de Planification Du Cours de Mécanique Appliquée en Première E, F1, MA, MEMESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Cours Vecteur Produit Scalaire QSTDocument4 pagesCours Vecteur Produit Scalaire QSTAbdelhamid100% (1)
- PIC - BAC F BP BT - TOumpé ERICDocument8 pagesPIC - BAC F BP BT - TOumpé ERICEmma NtiPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- 1 DS de Statique Graphique Et Analytique - PelleteuseDocument4 pages1 DS de Statique Graphique Et Analytique - PelleteuseMohamed NaciriPas encore d'évaluation
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
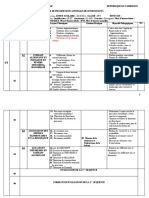
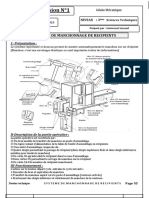
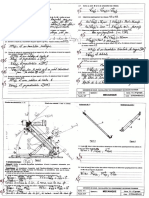
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- CN Fao IiDocument112 pagesCN Fao IiPouhe CyrillePas encore d'évaluation
- RAPPORT TP PICos18 G6 LASRI OULAASRIDocument28 pagesRAPPORT TP PICos18 G6 LASRI OULAASRIYassine OULAASRIPas encore d'évaluation
- Serie Logique 1ereDocument2 pagesSerie Logique 1ereقصص حقيقية واقعيةPas encore d'évaluation
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- Epreuve Constr Meca T1 1er GR 2023Document6 pagesEpreuve Constr Meca T1 1er GR 2023josias zinsouPas encore d'évaluation
- Correction-Devoir de Synthese N2-Voiture Pour enfants-2016-2TIDocument4 pagesCorrection-Devoir de Synthese N2-Voiture Pour enfants-2016-2TInassirPas encore d'évaluation
- 3 - Com - LOREXP - 2021 - A1082 - KAMGA - Conception Et Réalisation D'une Étuveuse À Vapeur Et D'une Décortiqueuse de Noix de Cajou.Document9 pages3 - Com - LOREXP - 2021 - A1082 - KAMGA - Conception Et Réalisation D'une Étuveuse À Vapeur Et D'une Décortiqueuse de Noix de Cajou.Dimitri Valdes Tchuindjang100% (1)
- RDM EleveDocument19 pagesRDM Eleveruben meye meye N'koumePas encore d'évaluation
- Exercices VérinsDistributeursDocument29 pagesExercices VérinsDistributeursSana Emmanuel100% (2)
- Bride Hydraulique Anafonct PDFDocument6 pagesBride Hydraulique Anafonct PDFOmar HamaniPas encore d'évaluation
- Sujet TECHNOEECAPIMARE2020 IPRBITCHEKIDocument9 pagesSujet TECHNOEECAPIMARE2020 IPRBITCHEKIIbrahim hakimPas encore d'évaluation
- Chapitre Ii Les Efforts InternesDocument27 pagesChapitre Ii Les Efforts InternesAYADI IMEDPas encore d'évaluation
- Corrigé Mécanique T1 GP1 2021Document6 pagesCorrigé Mécanique T1 GP1 2021kara baPas encore d'évaluation
- Corrigé Bac Pro MEI 2020Document14 pagesCorrigé Bac Pro MEI 2020HakobyanPas encore d'évaluation
- RAPPORT DE STAGE (Réparé) - 1Document17 pagesRAPPORT DE STAGE (Réparé) - 1Yannds Nkolo100% (1)
- Devoir de Synthèse N°3 2009 2010 (Soudani Sami)Document4 pagesDevoir de Synthèse N°3 2009 2010 (Soudani Sami)Med Aymen Bensalem100% (1)
- Devoir Les EnergiesDocument4 pagesDevoir Les Energiesfakher100% (1)
- Sujet MECANIQUE APPLIQUEE TF3 Seq 4Document3 pagesSujet MECANIQUE APPLIQUEE TF3 Seq 4Thierry Aymard Dieubou100% (1)
- Statique Graphique - Étude Statique Du Job Cat S185 CorrigéDocument3 pagesStatique Graphique - Étude Statique Du Job Cat S185 CorrigéThierry MarvynPas encore d'évaluation
- 01 Bac 2008 Princpale CorrigéDocument9 pages01 Bac 2008 Princpale CorrigéMohamed AbedPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Action MécaniqueDocument2 pagesAction MécaniqueLaurent Bertrand OtabelaPas encore d'évaluation
- RésuletanteDocument2 pagesRésuletanteLaurent Bertrand OtabelaPas encore d'évaluation
- Resolutio Graphique Doc ProfDocument4 pagesResolutio Graphique Doc ProfLaurent Bertrand OtabelaPas encore d'évaluation
- 2nde Cma 1Document2 pages2nde Cma 1Laurent Bertrand OtabelaPas encore d'évaluation
- MVT Plan Doc ProfDocument6 pagesMVT Plan Doc ProfLaurent Bertrand OtabelaPas encore d'évaluation
- Propagation Dun Mouvement Vibratoire SinusoïdalDocument4 pagesPropagation Dun Mouvement Vibratoire Sinusoïdaltvbox h96Pas encore d'évaluation
- Compte Rendu TP4Document5 pagesCompte Rendu TP4Abd El Basset BeNmansourPas encore d'évaluation
- 2cours Meteorologie Maritime 2022Document269 pages2cours Meteorologie Maritime 2022maryam ouachki100% (1)
- Devoir 1 TS2 - 07-08Document4 pagesDevoir 1 TS2 - 07-08Venisia HousePas encore d'évaluation
- TD 2 OptiqueDocument25 pagesTD 2 OptiqueJohnPas encore d'évaluation
- Raie SpectraleDocument4 pagesRaie SpectraleAramis MousquetayrePas encore d'évaluation
- Exo VibrationDocument7 pagesExo Vibrationbevangame97Pas encore d'évaluation
- Th9 SiteDocument16 pagesTh9 SiteMohamed FerchaPas encore d'évaluation
- Caractrisation Des Couches Minces Par Le 20150423150311 596009Document4 pagesCaractrisation Des Couches Minces Par Le 20150423150311 596009loubnarymPas encore d'évaluation
- 1 BasesThermiquesDocument19 pages1 BasesThermiquessniska00Pas encore d'évaluation
- Correction Annales Biophysique 2019Document19 pagesCorrection Annales Biophysique 2019loubnarymPas encore d'évaluation
- PropagExamen06 07 Sess1 CocodyDocument1 pagePropagExamen06 07 Sess1 CocodyissoufPas encore d'évaluation
- Cinematique Du SolideDocument20 pagesCinematique Du SolideKamal PcPas encore d'évaluation
- Rapport TP Étude D'un VenturiDocument13 pagesRapport TP Étude D'un VenturiOumaima100% (1)
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Série 2Document1 pageSérie 2Houda SenoussiPas encore d'évaluation
- Cours 1 Ondes Mécaniques Progressives PeriodiquesDocument3 pagesCours 1 Ondes Mécaniques Progressives PeriodiquesYoussef ElkhalfaouiPas encore d'évaluation
- Les Ondes Mécanique Progressives TestDocument5 pagesLes Ondes Mécanique Progressives TestmohamedPas encore d'évaluation
- RandriamboavonjyMamyR ESPA ING 08Document90 pagesRandriamboavonjyMamyR ESPA ING 08Eric KonanPas encore d'évaluation
- Cour Meteo D Boutonnet Part 2 Sur 3.originalDocument56 pagesCour Meteo D Boutonnet Part 2 Sur 3.originalNinou VivanoPas encore d'évaluation
- Série TTDocument2 pagesSérie TTMahfoud OmarPas encore d'évaluation
- TIC-N TT2 - TP (Rapport de Physique) V1 EtudiantDocument14 pagesTIC-N TT2 - TP (Rapport de Physique) V1 EtudiantArthur ZhangPas encore d'évaluation
- Premiere Annee de Med Dent Module Physique Animation Optique Geometrique Partie 1 Prof Karim Mansour 1Document13 pagesPremiere Annee de Med Dent Module Physique Animation Optique Geometrique Partie 1 Prof Karim Mansour 1wiamePas encore d'évaluation
- 5 AtténuationDocument10 pages5 AtténuationChristian NgalaPas encore d'évaluation
- Transmission de Chaleur PDFDocument285 pagesTransmission de Chaleur PDF2ste3100% (1)
- 03 - Cours - Dosimetrie RelativeDocument33 pages03 - Cours - Dosimetrie Relativeoura zawardouPas encore d'évaluation
- Examen Normal AntenneDocument2 pagesExamen Normal AntenneHajar ElattariPas encore d'évaluation
- Dimensionnement D'une Installation D'eau Chaude Sanitaire SolaireDocument8 pagesDimensionnement D'une Installation D'eau Chaude Sanitaire SolaireHASANA100% (1)