Vous aimerez peut-être aussi
- TD N 4 - Electrocinétique, Décomposition D Un Signal Périodique en Série de Fourier Et Filtrage Linéaire A. ElectrocinétiqueDocument5 pagesTD N 4 - Electrocinétique, Décomposition D Un Signal Périodique en Série de Fourier Et Filtrage Linéaire A. Electrocinétiqueandreas smethPas encore d'évaluation
- Série-1 - Circuit RLC 2008-2009Document4 pagesSérie-1 - Circuit RLC 2008-2009fethi1100% (6)
- Série 4 Electronique RSF CPGE 2023Document3 pagesSérie 4 Electronique RSF CPGE 2023copie masterPas encore d'évaluation
- 1 Divers Aspects Du Filtrage D'Une Tension Pé-Riodique: DS N°1 CCINP - E3aDocument7 pages1 Divers Aspects Du Filtrage D'Une Tension Pé-Riodique: DS N°1 CCINP - E3aMohamed El AmeliPas encore d'évaluation
- TDemag C7Document6 pagesTDemag C7zied houanebPas encore d'évaluation
- TDs - CPI1 - Electricité 2 - 2021Document14 pagesTDs - CPI1 - Electricité 2 - 2021tahmolPas encore d'évaluation
- Colle 9 ExercicesDocument6 pagesColle 9 ExercicesLOUEMBET BourgetPas encore d'évaluation
- Exo RL Bkta SMDocument8 pagesExo RL Bkta SMkhaoulaelkasri0Pas encore d'évaluation
- Série D'exercices - Physique Oscillation Électrique Forcée - Bac Math (2013-2014) MR Afdal AliDocument7 pagesSérie D'exercices - Physique Oscillation Électrique Forcée - Bac Math (2013-2014) MR Afdal AliWiem BenchahbounPas encore d'évaluation
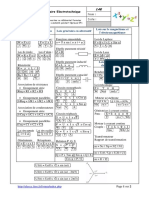
- TD_03_RSF_2024[1]Document5 pagesTD_03_RSF_2024[1]elbiyatimanalPas encore d'évaluation
- Série D'exercices N°6 - Physique Les Oscillations Électriques Forcées - Bac Sciences Exp (2015-2016) MR BARHOUMI EzedineDocument8 pagesSérie D'exercices N°6 - Physique Les Oscillations Électriques Forcées - Bac Sciences Exp (2015-2016) MR BARHOUMI EzedineGoKu SaMa0% (1)
- TD TransitoireDocument3 pagesTD Transitoirezied houanebPas encore d'évaluation
- Oscillations Libres D Un Circuit RLC Serie Exercices Non Corriges 3 2Document4 pagesOscillations Libres D Un Circuit RLC Serie Exercices Non Corriges 3 2Hiba JendoubiPas encore d'évaluation
- DM 5Document4 pagesDM 5black-listPas encore d'évaluation
- TP2 Mesures Élec en SinusDocument4 pagesTP2 Mesures Élec en Sinusmaxime.lussienPas encore d'évaluation
- Serie2 - TD - Electronique - Analogique XDocument3 pagesSerie2 - TD - Electronique - Analogique XFatinePas encore d'évaluation
- TD Electronique 2Document23 pagesTD Electronique 2Martinez SenjüPas encore d'évaluation
- Série de Révision 2 Dipole RL PDFDocument3 pagesSérie de Révision 2 Dipole RL PDFMed Brini0% (1)
- Série Physique Dipole RLC Forcé 2011 2012 (Trayia Nabil)Document4 pagesSérie Physique Dipole RLC Forcé 2011 2012 (Trayia Nabil)Iyed SEPas encore d'évaluation
- Exercice 1: Examen D'electronique de Puissance - 3ADocument2 pagesExercice 1: Examen D'electronique de Puissance - 3ALotfi AbidiPas encore d'évaluation
- TD4 EleDocument2 pagesTD4 EleEren JägerPas encore d'évaluation
- Coursuniversel Circuit Serie en Regime Sinusoidal Force PDFDocument15 pagesCoursuniversel Circuit Serie en Regime Sinusoidal Force PDFFulgence RandrianirinaPas encore d'évaluation
- DM4 20Document4 pagesDM4 20Kahil LaibPas encore d'évaluation
- TD 2 EcDocument2 pagesTD 2 EcChai mae AgnawPas encore d'évaluation
- Onduleur OutDocument4 pagesOnduleur OutnadirPas encore d'évaluation
- Série D'exercices N°6 - Sciences Physiques RLC Forcées - Bac Math (2013-2014) MR BARHOUMI EzzedineDocument6 pagesSérie D'exercices N°6 - Sciences Physiques RLC Forcées - Bac Math (2013-2014) MR BARHOUMI EzzedineAziz GaubiPas encore d'évaluation
- TP #5: Dipole (R, C), Dipole (R, L) en Regime TransitoireDocument4 pagesTP #5: Dipole (R, C), Dipole (R, L) en Regime Transitoireayoub najiPas encore d'évaluation
- Série 1 Phasemetre 2021Document6 pagesSérie 1 Phasemetre 2021JohnPas encore d'évaluation
- Cours-Dipole RLDocument4 pagesCours-Dipole RLapi-194867746100% (4)
- Circuit RLC Serie en Regime Sinusoidal Force Cours 2 1Document4 pagesCircuit RLC Serie en Regime Sinusoidal Force Cours 2 1Cobra XpPas encore d'évaluation
- Partie A: A Rédiger Sur Une Copie Séparée Exercice A1: Bobine Réelle Et Filtrage de Signal PériodiqueDocument6 pagesPartie A: A Rédiger Sur Une Copie Séparée Exercice A1: Bobine Réelle Et Filtrage de Signal Périodiqueaymanamkraz95Pas encore d'évaluation
- Serie9 PhysDocument9 pagesSerie9 PhysJabri ImenePas encore d'évaluation
- Serie 7 RL FBDocument10 pagesSerie 7 RL FBmarwa rabihPas encore d'évaluation
- 10-rlc Force PDFDocument5 pages10-rlc Force PDFAzizElheniPas encore d'évaluation
- EXERCICES Circuits Regime Sinusoidal-2Document2 pagesEXERCICES Circuits Regime Sinusoidal-2Zineb Jelbaoui71% (7)
- Dipole RL Exercices Corriges 1 2Document4 pagesDipole RL Exercices Corriges 1 2aitoumrharmarouane6Pas encore d'évaluation
- Exercices PC 2bac Science International FR 7 1Document4 pagesExercices PC 2bac Science International FR 7 1حميد خلفاويPas encore d'évaluation
- 7 2 Sujet RL RCDocument4 pages7 2 Sujet RL RCHafida JairPas encore d'évaluation
- Exercices PC 2bac Science International FR 7 1mmDocument4 pagesExercices PC 2bac Science International FR 7 1mmحميد خلفاويPas encore d'évaluation
- Série N 2 RLC Forcé Bac Math 2023Document3 pagesSérie N 2 RLC Forcé Bac Math 2023Aya Ben Aissa100% (1)
- TD OnduleursDocument3 pagesTD OnduleursAhmed LachematPas encore d'évaluation
- TD GradateursDocument8 pagesTD Gradateurssoufin elganiPas encore d'évaluation
- RLC SérieDocument8 pagesRLC SérieCheikh Sidya Aidara100% (1)
- Série Oscillations Électriques Forcées 2Document4 pagesSérie Oscillations Électriques Forcées 2azizPas encore d'évaluation
- TP4 RLCDocument3 pagesTP4 RLCCircuit couple0% (1)
- Oscillatteur RLCDocument5 pagesOscillatteur RLCscience_and_morePas encore d'évaluation
- 2010 AmNord Exo2 Sujet Electricite 5 5ptsDocument3 pages2010 AmNord Exo2 Sujet Electricite 5 5ptsla physique selon le programme FrançaisPas encore d'évaluation
- Déterminer L'impédance D'un CircuitDocument7 pagesDéterminer L'impédance D'un CircuitFélix KouassiPas encore d'évaluation
- TD 1ère Hacheur Onduleur GradateurDocument3 pagesTD 1ère Hacheur Onduleur GradateurCinquante-deux Le SaoudienPas encore d'évaluation
- 2012 2013DM5 PDFDocument25 pages2012 2013DM5 PDFbadrePas encore d'évaluation
- 16 CorrecExam11juin2009Document4 pages16 CorrecExam11juin2009jyPas encore d'évaluation
- Exercices 11 Dipole RLDocument4 pagesExercices 11 Dipole RLMouhibi AbdellahPas encore d'évaluation
- Colle 13 ExercicesDocument4 pagesColle 13 ExercicesLOUEMBET BourgetPas encore d'évaluation
- Exercice 1: Lecture Oscilloscope (Difficulté ) : Voie1Document4 pagesExercice 1: Lecture Oscilloscope (Difficulté ) : Voie1Mohamed AliPas encore d'évaluation
- Correction Des Exercices Bobine Circuit RL: Exercice 6 P 167: Régime PermanentDocument3 pagesCorrection Des Exercices Bobine Circuit RL: Exercice 6 P 167: Régime PermanentErnest AdouPas encore d'évaluation
- Travaux Diriges Ndeg3Document8 pagesTravaux Diriges Ndeg3Martin KangaPas encore d'évaluation
- TD ElecDocument5 pagesTD ElecAbdelilah El GmairiPas encore d'évaluation
- EPREUVE DE Circuit Analogique&Numer - Séq4-2012Document5 pagesEPREUVE DE Circuit Analogique&Numer - Séq4-2012ensetasse100% (1)
- Analyse de FourierDocument7 pagesAnalyse de Fourierimane ElarouiPas encore d'évaluation
- Chapitre 3Document8 pagesChapitre 3Rebhi AchrefPas encore d'évaluation
- j2623Document34 pagesj2623nadjib62100% (1)
- TD2 EnonceDocument3 pagesTD2 EnonceAyÒúß ĐḡPas encore d'évaluation
- Memoire Houti FaridDocument89 pagesMemoire Houti FaridEl Hor AminePas encore d'évaluation
- Shéma Cinématique 1LEM PDFDocument43 pagesShéma Cinématique 1LEM PDFThe AHM 1Pas encore d'évaluation
- Biblio 2004Document9 pagesBiblio 2004Mohamed El BarkaouyPas encore d'évaluation
- Plan Cours 5Document3 pagesPlan Cours 5fangatauPas encore d'évaluation
- CHAP 2cours Statique Des Fluides ENSADocument18 pagesCHAP 2cours Statique Des Fluides ENSAam1856100% (1)
- 7.CHAPITRE VII Etude SismiqueDocument20 pages7.CHAPITRE VII Etude SismiqueAhmad TamimiPas encore d'évaluation
- Benson Physique Mecanique - Chapitre - 8Document17 pagesBenson Physique Mecanique - Chapitre - 8emiliealachance100% (2)
- Chapitre 2Document7 pagesChapitre 2Mensi AbderraoufPas encore d'évaluation
- 00 SlidesDocument26 pages00 SlidesBrahim MouhcinePas encore d'évaluation
- TC3 - BA - Chap4 - Poutres Continues - FKM - 20-21Document11 pagesTC3 - BA - Chap4 - Poutres Continues - FKM - 20-21Bilel Ben BrahimPas encore d'évaluation
- CND Analyse Des DefautsDocument19 pagesCND Analyse Des Defautsمباشر يونسPas encore d'évaluation
- TD 3 - MF - EnsasDocument3 pagesTD 3 - MF - Ensasznikr upPas encore d'évaluation
- TP Aero EnpcDocument4 pagesTP Aero EnpcyassinePas encore d'évaluation
- Balance A Disque Tournant PDFDocument17 pagesBalance A Disque Tournant PDFRobert BocognanoPas encore d'évaluation
- Magnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMDocument27 pagesMagnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMdjeddi mabrouk83% (6)
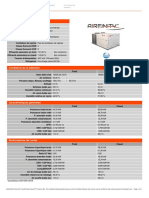
- EICD - 60 KW - Product ReportDocument3 pagesEICD - 60 KW - Product ReportbalalousePas encore d'évaluation
- NOTE CALCULS MUR RIDEAU-rev-1.1 PDFDocument7 pagesNOTE CALCULS MUR RIDEAU-rev-1.1 PDFNacer Izri100% (5)
- TP 1 Oscillateur AmortiDocument8 pagesTP 1 Oscillateur AmortiDjamel BoukredimiPas encore d'évaluation
- Formulaire 2Document2 pagesFormulaire 2ralojakPas encore d'évaluation
- Série N° 14: Oscillations Mécaniques Forcées - Classification Des Acides Et Des BasesDocument3 pagesSérie N° 14: Oscillations Mécaniques Forcées - Classification Des Acides Et Des BasesGhada DaddouPas encore d'évaluation
- CH12 - Ing150Document15 pagesCH12 - Ing150jpunlimitedPas encore d'évaluation
- Alignement ResumeDocument2 pagesAlignement ResumeabdessamadnePas encore d'évaluation
- Expériences Sur La Limite de La Loi de DarcyDocument9 pagesExpériences Sur La Limite de La Loi de DarcyHarmel Obami-OndonPas encore d'évaluation
- Physique Chimie Description Du MouvementDocument7 pagesPhysique Chimie Description Du MouvementLionel MESSIPas encore d'évaluation
- 5-1boite de Cisaillement PDFDocument4 pages5-1boite de Cisaillement PDFUomoD'AffariPas encore d'évaluation
- PROJET DE FORMATION LYCEE TECHNIQUE COMMERCIAL EL HADJI ABDOULAYE NIASSE DE KAOLAOCK (Récupération Automatique) (Récupération Automatique)Document12 pagesPROJET DE FORMATION LYCEE TECHNIQUE COMMERCIAL EL HADJI ABDOULAYE NIASSE DE KAOLAOCK (Récupération Automatique) (Récupération Automatique)Ibrahima KanePas encore d'évaluation









![TD_03_RSF_2024[1]](https://imgv2-2-f.scribdassets.com/img/document/720959380/149x198/576448c154/1712527609?v=1)