Vous aimerez peut-être aussi
- CEM en Électronique de Puissance-2Document20 pagesCEM en Électronique de Puissance-2MOHNISHKUMARJHAPas encore d'évaluation
- Fatigue Et Mécanique de La Rupture Des Pièces en Alliage LégerDocument17 pagesFatigue Et Mécanique de La Rupture Des Pièces en Alliage LégerOualidPas encore d'évaluation
- Écoulement Des Fluides. Écoulements en Conduites. RéseauxDocument19 pagesÉcoulement Des Fluides. Écoulements en Conduites. RéseauxSirineJamoussiPas encore d'évaluation
- Methode HAZEN WILLIAMS 1Document6 pagesMethode HAZEN WILLIAMS 1Salem Amarouchi100% (1)
- Code - Aster: Modélisation de L'amortissement en Dynamique LinéaireDocument13 pagesCode - Aster: Modélisation de L'amortissement en Dynamique Linéaireksm4aver3 ksm4aver3Pas encore d'évaluation
- Code - Aster: Critères de Stabilité MécaniqueDocument29 pagesCode - Aster: Critères de Stabilité MécaniqueAmenPas encore d'évaluation
- BM 5124Document9 pagesBM 5124Essassi AmmarPas encore d'évaluation
- Introduction Aux VibrationsDocument74 pagesIntroduction Aux VibrationsFranck TassainPas encore d'évaluation
- Structure ÉlancéeDocument271 pagesStructure ÉlancéeGuyenne NguyenPas encore d'évaluation
- Modelisation Action MecaDocument8 pagesModelisation Action MecamurphyleedjabaPas encore d'évaluation
- Cours RN PDFDocument288 pagesCours RN PDFAnonymous 94KtR5Pas encore d'évaluation
- Cours CharkaouiDocument26 pagesCours CharkaouilawlietshfPas encore d'évaluation
- Simpore YbDocument40 pagesSimpore YbAly OUEDRAOGOPas encore d'évaluation
- Cours HydrauliqueDocument98 pagesCours HydrauliqueLionel Ako100% (6)
- Pompe 4Document16 pagesPompe 4Ferchichi HatemPas encore d'évaluation
- Trés Important Pour Mecaniques FluidesDocument110 pagesTrés Important Pour Mecaniques FluidesedrissiadnanePas encore d'évaluation
- Mecanique Des Milieux ContinusDocument168 pagesMecanique Des Milieux ContinusKAYTO YTPas encore d'évaluation
- M Ecanique Des Uides 2 PDFDocument108 pagesM Ecanique Des Uides 2 PDFabdelraoufPas encore d'évaluation
- Code - Aster: Loi de Comportement À Double Critère Drücker Prager Pour La Fissuration Et La Compression Du BétonDocument57 pagesCode - Aster: Loi de Comportement À Double Critère Drücker Prager Pour La Fissuration Et La Compression Du BétonSerigne Fallou DiaPas encore d'évaluation
- Dynamique SDrapier Nov2009Document195 pagesDynamique SDrapier Nov2009Yassine KandoussiPas encore d'évaluation
- Calcul de Structure en Fatigue VibratoireDocument9 pagesCalcul de Structure en Fatigue VibratoireMichael MastonPas encore d'évaluation
- Cours GNIDocument124 pagesCours GNIzain zagoraPas encore d'évaluation
- Lignes Aériennes Chutes de TensionDocument13 pagesLignes Aériennes Chutes de TensionYounis MolayPas encore d'évaluation
- BTS BAT RDM FormulaireDocument102 pagesBTS BAT RDM Formulairekhouchkhouch100% (1)
- 6000 - FR - 00 - 03 - Choix Des Dimensions Du RoulementDocument38 pages6000 - FR - 00 - 03 - Choix Des Dimensions Du Roulementlpbeauchamp09Pas encore d'évaluation
- L3 Vibrations CM Maj23 10 20Document64 pagesL3 Vibrations CM Maj23 10 20Antone CalotPas encore d'évaluation
- MDF Master مهم جداDocument249 pagesMDF Master مهم جداbilal metidjaPas encore d'évaluation
- Commande Vectorielle de La Machine AsyncDocument64 pagesCommande Vectorielle de La Machine Asynchat mahdiPas encore d'évaluation
- Code - Aster: Solveurs Modaux Et Résolution Du Problème Généralisé (GEP)Document87 pagesCode - Aster: Solveurs Modaux Et Résolution Du Problème Généralisé (GEP)Mami SosoPas encore d'évaluation
- ConservationDocument38 pagesConservationNkurunziza DenisPas encore d'évaluation
- C PrédictiveDocument22 pagesC PrédictiveÜbü NtüPas encore d'évaluation
- FinitestrainDocument31 pagesFinitestrainBenaimeche Mohamed AminePas encore d'évaluation
- RDM2 HadjmiloudDocument107 pagesRDM2 HadjmiloudMohamed Houhou100% (1)
- Modélisation en Génie Des ProcédésDocument8 pagesModélisation en Génie Des Procédéskarim bellaniPas encore d'évaluation
- RDM-formulaire + Caract ProfilésDocument88 pagesRDM-formulaire + Caract ProfilésBBO38100% (1)
- PolDocument248 pagesPoltarif ashtarPas encore d'évaluation
- HydrauliqueDocument132 pagesHydrauliqueAbderrahim En-naouy100% (1)
- Modélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeDocument14 pagesModélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeRoch d'ARGAIGNONPas encore d'évaluation
- Af 5053Document23 pagesAf 5053Verdi bobPas encore d'évaluation
- Chap 01 RegulationDocument56 pagesChap 01 RegulationBessem BhiriPas encore d'évaluation
- Cours 2019Document122 pagesCours 2019Nina BordoPas encore d'évaluation
- Pol PDFDocument114 pagesPol PDFMechmedPas encore d'évaluation
- Revise PolyDocument300 pagesRevise PolyAmina BELABIDPas encore d'évaluation
- Plasticite SuquetDocument202 pagesPlasticite Suquetsaid SaterihPas encore d'évaluation
- Statique - CoursDocument69 pagesStatique - Coursa lbinPas encore d'évaluation
- Cours_YOUKANA Abderrahmane_Exercices Corrigés Mathématiques 3Document113 pagesCours_YOUKANA Abderrahmane_Exercices Corrigés Mathématiques 3lila.ihaddadenePas encore d'évaluation
- Poly MDF 24 02 2018 PDFDocument257 pagesPoly MDF 24 02 2018 PDFBilal Bouakrif100% (1)
- Pol PDFDocument221 pagesPol PDFSami SoufiPas encore d'évaluation
- b5431 Ressort À Lames-4Document14 pagesb5431 Ressort À Lames-4Mariem SahbaniPas encore d'évaluation
- L3 TP Fluent PDFDocument36 pagesL3 TP Fluent PDFGuediri Aimen100% (1)
- Mecanique de FluideDocument26 pagesMecanique de FluideNarapati NantabogaPas encore d'évaluation
- M Ecanique Des Fluides 2: Ondes, Couches Limites Et TurbulenceDocument135 pagesM Ecanique Des Fluides 2: Ondes, Couches Limites Et TurbulenceMaha HaddedPas encore d'évaluation
- Asservissement Et Régulation ContinusDocument54 pagesAsservissement Et Régulation ContinusJamii MohamedPas encore d'évaluation
- Mécanique Quantique Et Relativité: 1. Rédigé Avec L TEXDocument85 pagesMécanique Quantique Et Relativité: 1. Rédigé Avec L TEXHousseini Dan BouzouaPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Emploi Du Temps SP 2010-11 v3Document18 pagesEmploi Du Temps SP 2010-11 v3Abdelaziz IabdallatenPas encore d'évaluation
- Inerie Fleche Poutre Acier AluDocument5 pagesInerie Fleche Poutre Acier AluNgouoPas encore d'évaluation
- Averaged Unaveraged ResultsDocument24 pagesAveraged Unaveraged ResultsKévin GuiotPas encore d'évaluation
- TD3 5ieme IGEDocument2 pagesTD3 5ieme IGElahbak abderrahmenePas encore d'évaluation
- Chapitre 1 - Introduction A La Theorie Des CordesDocument16 pagesChapitre 1 - Introduction A La Theorie Des Cordesivan kikungaPas encore d'évaluation
- Instal BT ProfDocument31 pagesInstal BT ProfImmamHadramyPas encore d'évaluation
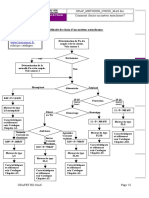
- Méthode de Choix D'un Moteur AsynchroneDocument3 pagesMéthode de Choix D'un Moteur AsynchroneSékhou DiakitéPas encore d'évaluation
- Liaisons ChimiquesDocument239 pagesLiaisons Chimiqueslopir120100% (6)
- MQdec 2022Document3 pagesMQdec 2022Hicham Al FalouPas encore d'évaluation
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- Notions de Base en RhéologieDocument43 pagesNotions de Base en RhéologieAya AlianiPas encore d'évaluation
- Chapitre1 2Document36 pagesChapitre1 2Mohammed HachemiPas encore d'évaluation
- Etude D'Un Jet Par Un Orifice - Determination de CV : Licence 02Document4 pagesEtude D'Un Jet Par Un Orifice - Determination de CV : Licence 02Inas Dr100% (1)
- Chimie: Première Partie: Étude de La Pile Zinc-NickelDocument2 pagesChimie: Première Partie: Étude de La Pile Zinc-Nickelyaasir ouukesoPas encore d'évaluation
- Fiche-Conv Unit Chiff SignDocument2 pagesFiche-Conv Unit Chiff SignbosmenPas encore d'évaluation
- Ensa Hociema - Poster - SOUMAYA ELJANOUS - JR21Document5 pagesEnsa Hociema - Poster - SOUMAYA ELJANOUS - JR21ElJanousSoumayaPas encore d'évaluation
- Cours T 11 FlexionDocument7 pagesCours T 11 FlexionAbdelhak OuanzouguiPas encore d'évaluation
- Prof Z Azzouz m1 Emeca Poly Ins ProDocument41 pagesProf Z Azzouz m1 Emeca Poly Ins Proمصعب دحمانيPas encore d'évaluation
- Series Ondes LumineusesDocument4 pagesSeries Ondes LumineusesMoulayMoulyPas encore d'évaluation
- 03-Animation Prise TerreDocument15 pages03-Animation Prise TerreLinda batolaPas encore d'évaluation
- Concours Doctorat UFAS 1 2019 4Document13 pagesConcours Doctorat UFAS 1 2019 4MohamedKecibaPas encore d'évaluation
- Filtre Actif PassifDocument8 pagesFiltre Actif PassifZiko Jay AndaloussiPas encore d'évaluation
- TH2016TROCNICOLASDocument113 pagesTH2016TROCNICOLASMassar SeckPas encore d'évaluation
- Introduction Cours PhysStat1Document9 pagesIntroduction Cours PhysStat1fayza mezrhabPas encore d'évaluation
- 5 Statique Plane Am1Document17 pages5 Statique Plane Am1YonnePas encore d'évaluation
- HF020Document4 pagesHF020saif2020Pas encore d'évaluation
- Transfert Thermique DR HADDADDocument94 pagesTransfert Thermique DR HADDADGasmi Kr100% (1)
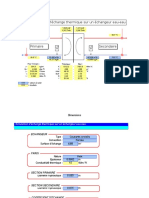
- Simulation Echangeurs Pour KarimDocument8 pagesSimulation Echangeurs Pour KarimYassine BouaichiPas encore d'évaluation
- Aspects ÉnergéDocument3 pagesAspects ÉnergéHaraf HarafPas encore d'évaluation