Vous aimerez peut-être aussi
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- MecaChap4 (GeomDesMasses)Document42 pagesMecaChap4 (GeomDesMasses)soroPas encore d'évaluation
- MecaChap4 (GeomDesMasses) PDFDocument42 pagesMecaChap4 (GeomDesMasses) PDFKRONH CHHYTHEANPas encore d'évaluation
- Sti MG - Géométrie Des MassesDocument19 pagesSti MG - Géométrie Des Massesmeoh eezaPas encore d'évaluation
- MecaChap4 (GeomDesMasses)Document33 pagesMecaChap4 (GeomDesMasses)rahmaboufalghaPas encore d'évaluation
- Annie Millet Cal - Stoch PDFDocument93 pagesAnnie Millet Cal - Stoch PDFZozo Zozo DiagnePas encore d'évaluation
- Cours GNIDocument124 pagesCours GNIzain zagoraPas encore d'évaluation
- MMC I Fse UcdDocument60 pagesMMC I Fse Ucdhicham-essadikiPas encore d'évaluation
- Cal Sto 2Document92 pagesCal Sto 2ミルユスポフ ショホルホPas encore d'évaluation
- Intégration Sur Un SegmentDocument13 pagesIntégration Sur Un SegmentThomas LingPas encore d'évaluation
- Cours09 10S3Document144 pagesCours09 10S3saida ID ouazizPas encore d'évaluation
- Alg1 Avec CouvertureDocument88 pagesAlg1 Avec CouvertureSara SarittaPas encore d'évaluation
- (Dyn) (CO) DynamiqueDocument20 pages(Dyn) (CO) DynamiqueHamala SidibePas encore d'évaluation
- Fonctions - Intégration - Equa DifDocument16 pagesFonctions - Intégration - Equa DifjcducheinPas encore d'évaluation
- Systemes DynamiquesDocument72 pagesSystemes DynamiquesEmma DjomoPas encore d'évaluation
- MecaChap10 (DynamiquePoint)Document59 pagesMecaChap10 (DynamiquePoint)HTR WAS HEREPas encore d'évaluation
- 221 Dyn Co DynamiqueDocument12 pages221 Dyn Co Dynamiquerania.hillal97Pas encore d'évaluation
- Analyse FonctionnelDocument72 pagesAnalyse FonctionnelDomey TugPas encore d'évaluation
- Poly ADDocument119 pagesPoly ADقرة عينيPas encore d'évaluation
- 4SGUAA3Document32 pages4SGUAA3Jean Jules BadiangPas encore d'évaluation
- Analyse 3Document113 pagesAnalyse 3rba05525Pas encore d'évaluation
- Cours ST 2ème Semestre - MESSIRDI BACHIR PDFDocument132 pagesCours ST 2ème Semestre - MESSIRDI BACHIR PDFHaitem MazariPas encore d'évaluation
- Cours de Probabilité Fast Uac-1Document39 pagesCours de Probabilité Fast Uac-1Sèdjro Régis H. LOKOSSOUPas encore d'évaluation
- LectureNotes2LicST2013 PDFDocument55 pagesLectureNotes2LicST2013 PDFZino ZindinPas encore d'évaluation
- 1S 07 SUITES CoursDocument10 pages1S 07 SUITES CourstoussaintPas encore d'évaluation
- Équations Aux Dérivées PartiellesDocument107 pagesÉquations Aux Dérivées PartiellesRadouane Souibgui100% (1)
- Boyer Pascal, Cours D'arithmetiqueDocument61 pagesBoyer Pascal, Cours D'arithmetiqueAnonymous va7umdWyhPas encore d'évaluation
- Bernard Gostiaux-Cours de Mathématiques Spéciales, Tome 2 - Topologie, Analyse Réelle. 2-Presses Universitaires de France - PUF (1993)Document418 pagesBernard Gostiaux-Cours de Mathématiques Spéciales, Tome 2 - Topologie, Analyse Réelle. 2-Presses Universitaires de France - PUF (1993)Yassine Sadoudi100% (2)
- Mathematique I (Algebre)Document49 pagesMathematique I (Algebre)khalis-mohammed3564Pas encore d'évaluation
- Cours2010 PDFDocument101 pagesCours2010 PDFcantor5Pas encore d'évaluation
- Bernard Gostiaux Cours de Mathématiques Spéciales, Tome 1 AlgèbreDocument484 pagesBernard Gostiaux Cours de Mathématiques Spéciales, Tome 1 AlgèbreJulien Darmon100% (1)
- Cours Montecarlo en StaDocument35 pagesCours Montecarlo en StaMohamed LatifiPas encore d'évaluation
- Methode Des Elements FinisDocument69 pagesMethode Des Elements FinisKhaledovich SoltaniPas encore d'évaluation
- NotionsMetrologie 30 06 2005 PDFDocument55 pagesNotionsMetrologie 30 06 2005 PDFMohammed AmouriPas encore d'évaluation
- Topo 111Document55 pagesTopo 111Khaled YadidouPas encore d'évaluation
- Cel 41Document109 pagesCel 41dft22000Pas encore d'évaluation
- Cours USTC Integration+Probabilites 2022Document183 pagesCours USTC Integration+Probabilites 2022zain zagoraPas encore d'évaluation
- Optimisation1 Chap3bDocument28 pagesOptimisation1 Chap3bSawssan Hanane100% (1)
- lebegintDocument59 pageslebegintAmine FadiliPas encore d'évaluation
- Algèbre Et Géométrie Boyer PascalDocument206 pagesAlgèbre Et Géométrie Boyer Pascalvlanch50% (2)
- Les Nombres ComplexesDocument14 pagesLes Nombres ComplexesShaiimae Sriti100% (1)
- Large CoursDocument240 pagesLarge CoursDezedy Andedy100% (1)
- EqGenerales PDFDocument104 pagesEqGenerales PDFRaoult KenPas encore d'évaluation
- GP Sym PDFDocument20 pagesGP Sym PDFAbdellatif ElouarratePas encore d'évaluation
- MMP LP206Document140 pagesMMP LP206zyrtechPas encore d'évaluation
- Mécanique Des Milieux ContinusDocument100 pagesMécanique Des Milieux ContinusiftstpbdiroPas encore d'évaluation
- Mecanique de Points - SUP - 230128 - 105441 PDFDocument82 pagesMecanique de Points - SUP - 230128 - 105441 PDFRag NarPas encore d'évaluation
- Chapitre 1Document14 pagesChapitre 1Yassine ErrakkasPas encore d'évaluation
- Mariem lfc1 PDFDocument105 pagesMariem lfc1 PDFValerie MelendezPas encore d'évaluation
- IntegrationDocument77 pagesIntegrationstephanegodefroyPas encore d'évaluation
- 011 CoursDocument119 pages011 Coursfahdl magdoulPas encore d'évaluation
- Mecanique Des Milieux Continus: Ecole Des Mines de ParisDocument507 pagesMecanique Des Milieux Continus: Ecole Des Mines de Parisvladimir zogoPas encore d'évaluation
- Optimisation EA1Document130 pagesOptimisation EA1GRADUATEPas encore d'évaluation
- BOUARICHDocument217 pagesBOUARICHsabri rabie100% (1)
- Géométrie 2Document98 pagesGéométrie 2Ikram Belalia100% (1)
- Poly MathsDocument111 pagesPoly MathskachmatnPas encore d'évaluation
- Syrthes3 4 TheoDocument71 pagesSyrthes3 4 Theosfrancois21Pas encore d'évaluation
- 2021 2022 CoursDistributionDocument90 pages2021 2022 CoursDistributionLamine KonatéPas encore d'évaluation
- Exercices Et Problemes Corriges de Thermodynamique ChimiqueDocument88 pagesExercices Et Problemes Corriges de Thermodynamique Chimiquehamidoun1285% (110)
- Manuel LatexDocument14 pagesManuel LatexjeanbrPas encore d'évaluation
- Tout Ce Que Vous Avez Toujours Voulu Savoir Sur LaTeX Sans Jamais Oser Le DemanderDocument338 pagesTout Ce Que Vous Avez Toujours Voulu Savoir Sur LaTeX Sans Jamais Oser Le DemanderMaxime GaudinPas encore d'évaluation
- Raccourci LatexDocument1 pageRaccourci LatexLao LavodiPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- Exos PDT Conjugaison G1Document16 pagesExos PDT Conjugaison G1Olivier Benard100% (1)
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
- Soukhoï Su-57 - WikipédiaDocument10 pagesSoukhoï Su-57 - WikipédiaMohamed Lamine TourePas encore d'évaluation
- Karim, Ousmane Socé PDFDocument27 pagesKarim, Ousmane Socé PDFL’unique SuperboyPas encore d'évaluation
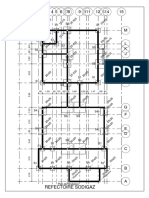
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- Facteur de PuissanceDocument9 pagesFacteur de PuissancesonoumoudjibouPas encore d'évaluation
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- Chauffeur SPLDocument1 pageChauffeur SPLmeryem.vfsPas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- Act2 1Document4 pagesAct2 1nassima ghallabiPas encore d'évaluation
- Chimie QuantiqueDocument5 pagesChimie Quantiquedavinccicode100% (1)
- 1sm G Fonction Ex SeulDocument5 pages1sm G Fonction Ex SeulSouhail El AsferPas encore d'évaluation
- Exam MDMDocument4 pagesExam MDMHaithem AminePas encore d'évaluation
- Catalogue PHOTOFLEX en FrancaisDocument26 pagesCatalogue PHOTOFLEX en FrancaisAllanlitwinPas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Les Bases de La Thermodynamique 2 Chapitre II PDFDocument11 pagesLes Bases de La Thermodynamique 2 Chapitre II PDFmahdi amraouiPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- CPS ClimatisationDocument2 pagesCPS Climatisationilyass tourkiPas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- Methode de TravailDocument2 pagesMethode de Travailamal akhoulouPas encore d'évaluation
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Is - Corrigé de L - Étude de Cas Ayda (Version 2016)Document5 pagesIs - Corrigé de L - Étude de Cas Ayda (Version 2016)Hicham DaouchPas encore d'évaluation
- Dictionnaire Amoureux Des Dieux Et Des DéessesDocument273 pagesDictionnaire Amoureux Des Dieux Et Des DéessesKone Assane100% (1)
- Enquête de Fréquentation Culturelle 2015 PDFDocument35 pagesEnquête de Fréquentation Culturelle 2015 PDFilikesummer1234Pas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Géologie de l'Amérique: Les Grands Articles d'UniversalisD'EverandGéologie de l'Amérique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsD'EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsPas encore d'évaluation
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- 500 secrets pour avoir un potager merveilleuxD'Everand500 secrets pour avoir un potager merveilleuxÉvaluation : 2 sur 5 étoiles2/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Anatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsD'EverandAnatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsPas encore d'évaluation