Vous aimerez peut-être aussi
- Conversion De L'Énergie Thermique Des Océans: Des différences de température entre les eaux de surface et les eaux profondes de l'océanD'EverandConversion De L'Énergie Thermique Des Océans: Des différences de température entre les eaux de surface et les eaux profondes de l'océanPas encore d'évaluation
- Manip4 PompeDocument18 pagesManip4 PompeMayssem SouidPas encore d'évaluation
- Travaux Diriges N1 PDFDocument4 pagesTravaux Diriges N1 PDFHamza LiberadosPas encore d'évaluation
- TD 1 Pompes 3raff 2022Document8 pagesTD 1 Pompes 3raff 2022amine aziziPas encore d'évaluation
- Tp1 VRD EpanetDocument8 pagesTp1 VRD EpanetLoTfi Sassi100% (1)
- Devoir 1Document5 pagesDevoir 1Gifted Mouhcine100% (1)
- TD1 Statique Bernoulli 18Document8 pagesTD1 Statique Bernoulli 18juuh gghPas encore d'évaluation
- 6-Exercic Suite Chap2Document12 pages6-Exercic Suite Chap2alemPas encore d'évaluation
- 6 - TD Mach Hyd EMI G Méca 2020-21Document6 pages6 - TD Mach Hyd EMI G Méca 2020-21Mohammed Elkouhen100% (1)
- TD Technologie HydrauliquesDocument2 pagesTD Technologie HydrauliquesDivin Makita67% (3)
- Devoir Station de PompageDocument4 pagesDevoir Station de PompageCesaire Gatchieu100% (1)
- Projet N°1 Pompes Et Stations de PompageDocument1 pageProjet N°1 Pompes Et Stations de PompageJoël Mètogbé Zinsalo100% (2)
- TD8 Chap6 Pertes de ChargeDocument3 pagesTD8 Chap6 Pertes de Chargewassim Aj100% (1)
- TD 2.0 Exercice N°1Document4 pagesTD 2.0 Exercice N°1Oussama MohdebPas encore d'évaluation
- TD 2 Esbtp Abidjan-1Document3 pagesTD 2 Esbtp Abidjan-1Silué Nawa PatricePas encore d'évaluation
- Hydraulique en Charge EX3Document3 pagesHydraulique en Charge EX3Hamza MokhtariPas encore d'évaluation
- TD3sujet PDFDocument5 pagesTD3sujet PDFYounes OumaimounPas encore d'évaluation
- Chapitre III Suite - Cavitation Et Loi de Similitude Dans Les Pompes Centrifuge-ConvertiDocument12 pagesChapitre III Suite - Cavitation Et Loi de Similitude Dans Les Pompes Centrifuge-ConvertiAbderrahim JamilPas encore d'évaluation
- Examen Hydraulique 2020 2021 Avec GrapheDocument5 pagesExamen Hydraulique 2020 2021 Avec Grapheinfo mondePas encore d'évaluation
- Serie 1 LGENERG-A2-01Document4 pagesSerie 1 LGENERG-A2-01salem nour100% (1)
- TD 4Document2 pagesTD 4Abdel Ilah El AzzabPas encore d'évaluation
- Travaux Diriges de Mecanique Des FluidesDocument6 pagesTravaux Diriges de Mecanique Des FluidesBerthelot YamaPas encore d'évaluation
- Colebrook Ts 2 Cira RevisionsDocument3 pagesColebrook Ts 2 Cira RevisionsMourad TajPas encore d'évaluation
- Ecoulement HorizontalDocument2 pagesEcoulement Horizontalluluch zeeroPas encore d'évaluation
- Enoncs FluidesDocument27 pagesEnoncs FluidesSouhayl Kaibi100% (1)
- Exercice D'application (Devoir N°1)Document2 pagesExercice D'application (Devoir N°1)Paul-Elie Dossou0% (1)
- Leçon N°1 Généralité Sur Les Machines HydrauliquesDocument12 pagesLeçon N°1 Généralité Sur Les Machines HydrauliquesMohamed SyllaPas encore d'évaluation
- Null 6Document5 pagesNull 6JoelPas encore d'évaluation
- Projet de Fin D'année: Système Hydraulique Pour La Récupération de L' Énergie MarineDocument47 pagesProjet de Fin D'année: Système Hydraulique Pour La Récupération de L' Énergie MarineHABCHI100% (1)
- SERIE I Pompes GMS III Exo 2019-ConvertiDocument8 pagesSERIE I Pompes GMS III Exo 2019-ConvertiMarouf OussamaPas encore d'évaluation
- Série 1Document5 pagesSérie 1Khatri Marouane75% (4)
- Exercices de Mécanique Des Fluides: Terminale STL PLPIDocument9 pagesExercices de Mécanique Des Fluides: Terminale STL PLPIStéphane WilliamPas encore d'évaluation
- Cours AEP Partie 2Document6 pagesCours AEP Partie 2badrPas encore d'évaluation
- Recueil Des Travaux Diriges Master1Document12 pagesRecueil Des Travaux Diriges Master1BOULINGUI NGOTPas encore d'évaluation
- Compte RenduDocument18 pagesCompte RenduMolka ZayaniPas encore d'évaluation
- Chapitre IV Eclmnt Non UniformeDocument8 pagesChapitre IV Eclmnt Non UniformeFouad DimanePas encore d'évaluation
- Exos CorrigésDocument23 pagesExos CorrigésilyaPas encore d'évaluation
- 05EX Mec FluideDocument16 pages05EX Mec FluideMariam DaaliPas encore d'évaluation
- Cours Meìcanique Des FluidesDocument79 pagesCours Meìcanique Des FluidesErrafiy OmarPas encore d'évaluation
- TP4 Pompes Centrifuges SIRINEDocument10 pagesTP4 Pompes Centrifuges SIRINEMayssem SouidPas encore d'évaluation
- TP HydrauliqueDocument20 pagesTP HydrauliqueBrahim ABAGHOUGHPas encore d'évaluation
- TP Machines HydrauliquesDocument29 pagesTP Machines HydrauliquesIMANE LOLPas encore d'évaluation
- Exercice D'applicationDocument12 pagesExercice D'applicationAbdelhani Moussaoui100% (1)
- Série 4 Avec SolutionDocument8 pagesSérie 4 Avec Solutionjust ANDROIDPas encore d'évaluation
- Exercices Partie HydrostatiqueDocument12 pagesExercices Partie HydrostatiqueilyaPas encore d'évaluation
- Transport Solide Par Charriage Transport Solide Par Charriage Transport Solide Par Charriage Transport Solide Par CharriageDocument26 pagesTransport Solide Par Charriage Transport Solide Par Charriage Transport Solide Par Charriage Transport Solide Par Charriagerami ouerghiPas encore d'évaluation
- TP2 MaDocument11 pagesTP2 Majust ANDROIDPas encore d'évaluation
- TD 1 CorDocument5 pagesTD 1 CoroussamaPas encore d'évaluation
- Dynamique Des Fluides IncompressiblesDocument12 pagesDynamique Des Fluides IncompressiblesAyoubPas encore d'évaluation
- Examen Aep 1ere Ses - Kinindo 2021Document1 pageExamen Aep 1ere Ses - Kinindo 2021Dieudonné ManirakizaPas encore d'évaluation
- TD 2 - Statique Et Dynamique Des FluidesDocument3 pagesTD 2 - Statique Et Dynamique Des FluidesStephane YavoPas encore d'évaluation
- TPs Machines HydrauliquesDocument18 pagesTPs Machines Hydrauliqueskader100% (3)
- Cours Route 2Document114 pagesCours Route 2ZeroualPas encore d'évaluation
- TP Assainissement SWMMDocument2 pagesTP Assainissement SWMMfarouk achia100% (1)
- Exercices Sur Les Moeurs À Combustion InterneDocument9 pagesExercices Sur Les Moeurs À Combustion InterneAyak OubPas encore d'évaluation
- TD Pompes VolumétriquesDocument3 pagesTD Pompes Volumétriquessouheilbeji800Pas encore d'évaluation
- Exercices HydrodynamiqueDocument2 pagesExercices HydrodynamiqueSawab Madene100% (1)
- $exo PompDocument28 pages$exo PompKader BakourPas encore d'évaluation
- Poly TDMeca DefDocument72 pagesPoly TDMeca DefIssam Sembati100% (1)
- Dynamique Des Fluides Appliquée (1)Document95 pagesDynamique Des Fluides Appliquée (1)mirakabela766Pas encore d'évaluation
- Cric HydrauliqueDocument164 pagesCric HydrauliquesaaidPas encore d'évaluation
- thèse etude et calibration rebotsDocument133 pagesthèse etude et calibration rebotssaaidPas encore d'évaluation
- Office de La Formation Professionnelle Et de La Promotion Du TravailDocument4 pagesOffice de La Formation Professionnelle Et de La Promotion Du TravailsaaidPas encore d'évaluation
- Exercice Api Pid Ex1 SolutionDocument10 pagesExercice Api Pid Ex1 SolutionsaaidPas encore d'évaluation
- Chaine de Nettoyage VHDL Multisim GrafceDocument26 pagesChaine de Nettoyage VHDL Multisim GrafceMouad AdPas encore d'évaluation
- 05 - Les Pompes HydrauliquesDocument4 pages05 - Les Pompes Hydrauliquesgrand totoPas encore d'évaluation
- Exercice Api Pid Ex1 SolutionDocument10 pagesExercice Api Pid Ex1 SolutionsaaidPas encore d'évaluation
- M - 27 - Dépannage de Pompes Et de Moteurs HydrauliquesDocument112 pagesM - 27 - Dépannage de Pompes Et de Moteurs HydrauliquessaaidPas encore d'évaluation
- Analyse de FonctionnementDocument1 pageAnalyse de FonctionnementsaaidPas encore d'évaluation
- Legrafcet1 NewDocument301 pagesLegrafcet1 NewsaaidPas encore d'évaluation
- M101 Métier Et FormationDocument55 pagesM101 Métier Et FormationsaaidPas encore d'évaluation
- Codeurs RototifDocument6 pagesCodeurs RototifsaaidPas encore d'évaluation
- Cours Autom LPAIIDocument65 pagesCours Autom LPAIIElmokh LassaadPas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation
- Chauffeur SPLDocument1 pageChauffeur SPLmeryem.vfsPas encore d'évaluation
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation
- Karim, Ousmane Socé PDFDocument27 pagesKarim, Ousmane Socé PDFL’unique SuperboyPas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Syllabus LAITS ET PRODUITS LAITIERS - 2Document3 pagesSyllabus LAITS ET PRODUITS LAITIERS - 2Gedion DouaPas encore d'évaluation
- TD2 MCC Corrigé InfotroniqueDocument3 pagesTD2 MCC Corrigé InfotroniqueRima AlayaPas encore d'évaluation
- Composition Et Correction Français 1AP T2Document4 pagesComposition Et Correction Français 1AP T2Boud Aek100% (1)
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- PDFDocument24 pagesPDFCompétitionPas encore d'évaluation
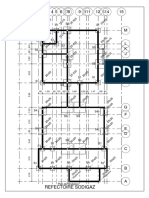
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Glossaire Les Littoraux - PufDocument11 pagesGlossaire Les Littoraux - PufAndréaPas encore d'évaluation
- Facteur de PuissanceDocument9 pagesFacteur de PuissancesonoumoudjibouPas encore d'évaluation
- Act2 1Document4 pagesAct2 1nassima ghallabiPas encore d'évaluation
- Exos PDT Conjugaison G1Document16 pagesExos PDT Conjugaison G1Olivier Benard100% (1)
- Introduction A L'immunologieDocument9 pagesIntroduction A L'immunologieBalakibawi ESSOPas encore d'évaluation
- Matièreexamen 4 Ème Aet DDocument6 pagesMatièreexamen 4 Ème Aet DToby 17Pas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- AFAM - Projet de RechercheDocument23 pagesAFAM - Projet de RechercheAlbert Francis Abega MekongoPas encore d'évaluation
- CPS ClimatisationDocument2 pagesCPS Climatisationilyass tourkiPas encore d'évaluation
- Dictionnaire Amoureux Des Dieux Et Des DéessesDocument273 pagesDictionnaire Amoureux Des Dieux Et Des DéessesKone Assane100% (1)
- Enquête de Fréquentation Culturelle 2015 PDFDocument35 pagesEnquête de Fréquentation Culturelle 2015 PDFilikesummer1234Pas encore d'évaluation
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- 500 secrets pour avoir un potager merveilleuxD'Everand500 secrets pour avoir un potager merveilleuxÉvaluation : 2 sur 5 étoiles2/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsD'EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- 160 ressources pour se lancer dans la vidéo quand on n’y connait rienD'Everand160 ressources pour se lancer dans la vidéo quand on n’y connait rienPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Géologie de l'Amérique: Les Grands Articles d'UniversalisD'EverandGéologie de l'Amérique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Jus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTD'EverandJus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTPas encore d'évaluation
- Anatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursD'EverandAnatomie & 100 étirements essentiels: Techniques, Bénéfices attendus, Précautions à prendre, Conseils, Tableaux de séries, DouleursPas encore d'évaluation
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation