Vous aimerez peut-être aussi
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Analyse Symbolique Des SLCIDocument3 pagesAnalyse Symbolique Des SLCISalma MnasriPas encore d'évaluation
- Transformée de Fourier Des Signaux Non-PériodiquesDocument9 pagesTransformée de Fourier Des Signaux Non-Périodiquesmed Boutaa100% (1)
- Chapitre2 Systèmes AsservisDocument14 pagesChapitre2 Systèmes AsservisEmmanuel Kawalina KatalikoPas encore d'évaluation
- Transformée de Laplace ELN 3Document13 pagesTransformée de Laplace ELN 3DocPas encore d'évaluation
- Équations Des Systèmes LinéairesDocument5 pagesÉquations Des Systèmes Linéairesmadou gana IbrahimPas encore d'évaluation
- Cours MQ 2016-2017 Definitive - PR BENABICHA PDFDocument83 pagesCours MQ 2016-2017 Definitive - PR BENABICHA PDFSoukainaPas encore d'évaluation
- Produit de ConvolutionDocument3 pagesProduit de ConvolutionZohir BensalemPas encore d'évaluation
- 8 PDFDocument2 pages8 PDFBrsioft BloggerPas encore d'évaluation
- Troisième chapitreTS2020 PDFDocument16 pagesTroisième chapitreTS2020 PDFboukhili majedPas encore d'évaluation
- Rappels Sur La Transformée de LaplaceDocument5 pagesRappels Sur La Transformée de LaplacesouadPas encore d'évaluation
- Transformée de FourierDocument8 pagesTransformée de FourierOthman Nchifa100% (1)
- DDC - Outils Mathématiques Fev 2021Document47 pagesDDC - Outils Mathématiques Fev 2021abdessamad taoualPas encore d'évaluation
- SAM Transformee de LaplaceDocument17 pagesSAM Transformee de Laplacejules.michauxPas encore d'évaluation
- 1Document8 pages1Houda ElyoussfiPas encore d'évaluation
- TS Cours Chapitre 1Document5 pagesTS Cours Chapitre 1Azze DdinePas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Hafa ApbPas encore d'évaluation
- Commande Numérique - Outils MathématiquesDocument40 pagesCommande Numérique - Outils Mathématiquesrajaa latifiPas encore d'évaluation
- Automatique Chapitre 2Document8 pagesAutomatique Chapitre 2Ghaith AouiniPas encore d'évaluation
- Cours Filtrage AnalogiqueDocument11 pagesCours Filtrage AnalogiqueJuste KibaPas encore d'évaluation
- Correction de Série 3-Etude-fct-2BIOF-FFFDocument9 pagesCorrection de Série 3-Etude-fct-2BIOF-FFFMomme Ould Deyahi Achrif100% (3)
- Résumé 6 - Logarithme-2bacDocument1 pageRésumé 6 - Logarithme-2bacAbde Aitoutbib83% (6)
- Exercices - Chap 1Document8 pagesExercices - Chap 1Esteban hubertPas encore d'évaluation
- CHAPITRE I Régulation KechroudDocument3 pagesCHAPITRE I Régulation KechroudALLAG AbdslamPas encore d'évaluation
- Circuits Électriques en Régime Sinusoidale220565Document6 pagesCircuits Électriques en Régime Sinusoidale220565mokchaha.ahmedPas encore d'évaluation
- ENGI Test 2 FormulaireDocument2 pagesENGI Test 2 Formulaireanthony duboisPas encore d'évaluation
- CM - 1 Automatique Linéaire MGC1063MDocument24 pagesCM - 1 Automatique Linéaire MGC1063Mtom bouteillePas encore d'évaluation
- Chapitre 2Document52 pagesChapitre 2ELmokhtar HamrouniPas encore d'évaluation
- Chapitre 2 Methode OperationnelleDocument12 pagesChapitre 2 Methode Operationnellecheikh tidiane diopPas encore d'évaluation
- Chapitre 2 Methode Operationnelle - CopieDocument12 pagesChapitre 2 Methode Operationnelle - Copiecheikh tidiane diopPas encore d'évaluation
- AsservissementDocument8 pagesAsservissementCheick KouatéPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4BeQio100% (1)
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4medPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4chakib abPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Coulibaly DavidPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Assia AssiaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Güneş PrįnPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Assia AssiaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4anas100% (1)
- R Sum de Cours Thermodynamque 1Document2 pagesR Sum de Cours Thermodynamque 1EliasPas encore d'évaluation
- Résumé Thermodynamiquel1Document2 pagesRésumé Thermodynamiquel1Teddy RavatsyPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4SirineJamoussiPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Assia AssiaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4BensabeurPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Youssef BouazzaouiPas encore d'évaluation
- ResumeThermodynamique 4 PDFDocument2 pagesResumeThermodynamique 4 PDFSaihi OussemaPas encore d'évaluation
- ResumeThermodynamique 4 PDFDocument2 pagesResumeThermodynamique 4 PDFSaihi OussemaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Ayyoub DAHBIPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Assia AssiaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Assia AssiaPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Youssef FaradiPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4Linda KoundziPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1Hafa ApbPas encore d'évaluation
- 48bc1208-01ce-46d0-8eda-278a76bd484bDocument3 pages48bc1208-01ce-46d0-8eda-278a76bd484bbach nalPas encore d'évaluation
- Résumé Des Cours 6, 7, 8 Et 9 PDFDocument2 pagesRésumé Des Cours 6, 7, 8 Et 9 PDFrasheedmoumenPas encore d'évaluation
- Asservissement Échantillonné PDFDocument79 pagesAsservissement Échantillonné PDFFabrice FotsoPas encore d'évaluation
- Fonctions Électroniques Et Filtrage AnalogiqueDocument23 pagesFonctions Électroniques Et Filtrage AnalogiqueLatifa BarikPas encore d'évaluation
- Chapitre3 SAPSDocument29 pagesChapitre3 SAPSHouda SenoussiPas encore d'évaluation
- Tp2 Sabir TalbyDocument17 pagesTp2 Sabir TalbyKamal KamalPas encore d'évaluation
- Chapitre II La Transformée de LaplaceDocument2 pagesChapitre II La Transformée de LaplaceMaribelle TopPas encore d'évaluation
- Mathématiques Pour Lingénieur - Rappels de Cours, Méthodes, Exercices Et Problèmes Avec Corrigés Détaillés (PDFDrive) - 136-137Document1 pageMathématiques Pour Lingénieur - Rappels de Cours, Méthodes, Exercices Et Problèmes Avec Corrigés Détaillés (PDFDrive) - 136-137AymanPas encore d'évaluation
- Compte-Rendu TP1 Bio3 Nada Limeme Siwar TaamallahDocument7 pagesCompte-Rendu TP1 Bio3 Nada Limeme Siwar TaamallahNada LimemePas encore d'évaluation
- MIMODocument52 pagesMIMOJordan WilsonPas encore d'évaluation
- Suites TS2Document9 pagesSuites TS2Mourad MouradbensalemPas encore d'évaluation
- 13 - Les Techniques de Prévision Des Ventes - Ajustement Exponentiel Et PuissanceDocument20 pages13 - Les Techniques de Prévision Des Ventes - Ajustement Exponentiel Et PuissanceKingo ZizoPas encore d'évaluation
- 10TD2 EseDocument2 pages10TD2 EseMYSTÉRES100% (1)
- These LeiteDocument95 pagesThese LeiteMarwa LtifiPas encore d'évaluation
- Chapitre 04Document47 pagesChapitre 04Mariona AutranPas encore d'évaluation
- TD 6 Analyse de Fourier Des Signaux À Temps Discrets FinalDocument6 pagesTD 6 Analyse de Fourier Des Signaux À Temps Discrets FinalIlhem MechiPas encore d'évaluation
- Intégrale de Riemann L1 S2 FSTDocument55 pagesIntégrale de Riemann L1 S2 FSTidrissa sackoPas encore d'évaluation
- Filtres Du Second OrdreDocument4 pagesFiltres Du Second OrdreEmmanuel AkedPas encore d'évaluation
- Solution Examen 2014Document3 pagesSolution Examen 2014Sara BensebaPas encore d'évaluation
- TD 5Document2 pagesTD 5Issa IssaPas encore d'évaluation
- Devoir MehdiDocument7 pagesDevoir MehdiMehdi ElfazniPas encore d'évaluation
- Solutions Des Exercices - Équations Et Inéquations Du Second Degré - 2nd - SunudaaraDocument19 pagesSolutions Des Exercices - Équations Et Inéquations Du Second Degré - 2nd - SunudaaraAhmadou Gueye SallPas encore d'évaluation
- Corrige TD 1 PDFDocument11 pagesCorrige TD 1 PDFMed ElbataniPas encore d'évaluation
- Cours Sur Les Fonctions Exponentielles TST2SDocument3 pagesCours Sur Les Fonctions Exponentielles TST2SNicolas AktromPas encore d'évaluation
- La Théorie Des Graphes - Exercices CorrigésDocument17 pagesLa Théorie Des Graphes - Exercices CorrigésNoureddine93% (109)
- Equations DifferentiellesDocument46 pagesEquations DifferentiellesWafa BenzaouiPas encore d'évaluation
- TH M Math 2020 27Document49 pagesTH M Math 2020 27Doha El jaadiPas encore d'évaluation
- Cours Application 1 Bac SMDocument5 pagesCours Application 1 Bac SMBassirou SeckPas encore d'évaluation
- Application de La Coloration D - OUTMANE Abdelmoughit - 3206Document43 pagesApplication de La Coloration D - OUTMANE Abdelmoughit - 3206katakitoPas encore d'évaluation
- Dérivabilité, Limite Et FonctionDocument10 pagesDérivabilité, Limite Et FonctionAhmed diopPas encore d'évaluation
- 3eme Annee CollegeDocument14 pages3eme Annee CollegeYyàsSíñè Chatri ÑèwPas encore d'évaluation
- Concours Commun Polytechniques (CCINP) 2023 MP-MPI Mathématiques 2 CaDocument8 pagesConcours Commun Polytechniques (CCINP) 2023 MP-MPI Mathématiques 2 CaLmoh Bk BkPas encore d'évaluation
- Régression Linéaire-Rappel-MatriceDocument6 pagesRégression Linéaire-Rappel-Matricebadr rahiouiPas encore d'évaluation
- Statistiques Appliquées PDFDocument90 pagesStatistiques Appliquées PDFIdjabou Mtsounga MoindzePas encore d'évaluation
- HXCH7 Algebre Lineaire Et Polynomes Exo1Document53 pagesHXCH7 Algebre Lineaire Et Polynomes Exo1Marcel ESSOMBAPas encore d'évaluation
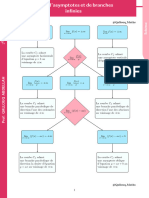
- Shema Branche InfiniDocument1 pageShema Branche Infinilinaflower41Pas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation