Vous aimerez peut-être aussi
- Lab 1Document7 pagesLab 1Michel VoyerPas encore d'évaluation
- TP1 AutomatiqueDocument14 pagesTP1 AutomatiqueM'tıraouı BadrPas encore d'évaluation
- TP1 L3 Signal 20-21Document6 pagesTP1 L3 Signal 20-21Salim NaouiPas encore d'évaluation
- BEN CHEIKH Othman D M1 Electrotechnique IndustrielleDocument2 pagesBEN CHEIKH Othman D M1 Electrotechnique IndustrielleELmokhtar HamrouniPas encore d'évaluation
- Modélisation, Simulation Et Commande Des Processus ÉlectriqueDocument30 pagesModélisation, Simulation Et Commande Des Processus ÉlectriqueMustapha El MetouiPas encore d'évaluation
- Younes KabbajDocument18 pagesYounes KabbajYOUNES KABBAJPas encore d'évaluation
- TD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Document7 pagesTD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Nasro SiotousPas encore d'évaluation
- TP011Document16 pagesTP01118188yem3761Pas encore d'évaluation
- Cours MEFDocument111 pagesCours MEFNarimane DibPas encore d'évaluation
- TP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5Document17 pagesTP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5moha100% (1)
- Cours Et TD Techno-Schéma Les CNA-CAN 3A BT ElectroniqueDocument14 pagesCours Et TD Techno-Schéma Les CNA-CAN 3A BT ElectroniqueFélix KouassiPas encore d'évaluation
- rp2 PDFDocument15 pagesrp2 PDFAymane MouhssinePas encore d'évaluation
- Modélisation Et Simulation (MatLab)Document12 pagesModélisation Et Simulation (MatLab)Néstor Valles Villarreal100% (1)
- TP EEA SER Asservissement RégulationDocument13 pagesTP EEA SER Asservissement RégulationKawthar TouzaniPas encore d'évaluation
- Chap - 1 - Séance 01 - Généralités Sur Les SystèmesDocument6 pagesChap - 1 - Séance 01 - Généralités Sur Les SystèmeskhaledPas encore d'évaluation
- Test MatlabDocument52 pagesTest MatlabMohamed LatifiPas encore d'évaluation
- TP1 Réponses Fréquentielles Et Identification Des SystèmesDocument3 pagesTP1 Réponses Fréquentielles Et Identification Des SystèmesYahiyaoui SofyanePas encore d'évaluation
- mn03 1Document15 pagesmn03 1Amir Na DzPas encore d'évaluation
- Compte Rendu MatlabDocument29 pagesCompte Rendu MatlabHana ElPas encore d'évaluation
- TP AsservissementDocument17 pagesTP Asservissementhaythem mokdedPas encore d'évaluation
- TPN 06Document2 pagesTPN 06meriemmamq1Pas encore d'évaluation
- Cours Auto Chapitre 2Document4 pagesCours Auto Chapitre 2Nabil TAALLAHPas encore d'évaluation
- CR Auto BNDocument25 pagesCR Auto BNOUTMANE FERNOUCHPas encore d'évaluation
- TP 1 Version FinaleDocument10 pagesTP 1 Version FinaleZH HamzaPas encore d'évaluation
- TP01 Informatique3Document4 pagesTP01 Informatique3Fouad BenPas encore d'évaluation
- Fascicule TP AutomatiqueDocument33 pagesFascicule TP AutomatiqueRahma TbPas encore d'évaluation
- TP1 - Traitement - Du - Signal - MasterDocument5 pagesTP1 - Traitement - Du - Signal - MasterFatima Zohra ESSAKHAIRY100% (2)
- Modélisation Des SystèmesDocument7 pagesModélisation Des Systèmestenere comPas encore d'évaluation
- TP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et FréquentiellesDocument10 pagesTP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et Fréquentiellesأيمن بوهراوةPas encore d'évaluation
- TP AutomatiqueDocument24 pagesTP AutomatiqueHoussam Haddani100% (1)
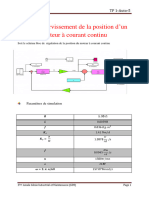
- TP 3Document6 pagesTP 3hamza tourabiPas encore d'évaluation
- TP 1Document68 pagesTP 1Hana KhemissiPas encore d'évaluation
- Compte Rendu Des TP de La RegulationDocument23 pagesCompte Rendu Des TP de La Regulationomaima hamaniPas encore d'évaluation
- TP N°1: Analyse Temporelle Du Système 1 Ordre: Nom Et Prénom Groupe Date NoteDocument4 pagesTP N°1: Analyse Temporelle Du Système 1 Ordre: Nom Et Prénom Groupe Date NoteAntoinette HenrichonPas encore d'évaluation
- TP Informatique (Matlab & Simulink)Document22 pagesTP Informatique (Matlab & Simulink)EL WafaaPas encore d'évaluation
- Chapitre 1 - Systèmes AsservisDocument10 pagesChapitre 1 - Systèmes AsservisSif eddinePas encore d'évaluation
- 2-tp MCC ModelecausalDocument16 pages2-tp MCC ModelecausalfaroukPas encore d'évaluation
- Rapport Automatique Tp1Document16 pagesRapport Automatique Tp1hafosaamrPas encore d'évaluation
- tp1 PDFDocument7 pagestp1 PDFbazine noriPas encore d'évaluation
- RapportDocument12 pagesRapportMohamed Boussakssou100% (1)
- (ModSLCI) (CO) Modelisation Des SLCIDocument28 pages(ModSLCI) (CO) Modelisation Des SLCIboniyaojeaneliePas encore d'évaluation
- Régulation Tp1Document9 pagesRégulation Tp1Ahmed BoualiPas encore d'évaluation
- TP 1 SNLDocument8 pagesTP 1 SNLbendjeddou ammarPas encore d'évaluation
- Animation MapleDocument23 pagesAnimation MapleAchraf SOUNNIPas encore d'évaluation
- TP - Outil de Simulation MATLABDocument17 pagesTP - Outil de Simulation MATLABRaphael RAKOTOARIVELOPas encore d'évaluation
- Modélisation SystèmesDocument7 pagesModélisation Systèmeslouizini abderahmanePas encore d'évaluation
- Série 5 (Sous Programmes)Document8 pagesSérie 5 (Sous Programmes)benzaied100% (4)
- TP Sal MatlabDocument7 pagesTP Sal MatlabSaif SA100% (2)
- TP01 RégulationDocument10 pagesTP01 RégulationAhmed BoualiPas encore d'évaluation
- TP 1Document5 pagesTP 1صناعة الحقائب الجلديةPas encore d'évaluation
- Examen 2020-2021 D'identification Et ModélisationDocument3 pagesExamen 2020-2021 D'identification Et Modélisationarwa bouazaouiPas encore d'évaluation
- Iinterpolation - CopieDocument41 pagesIinterpolation - Copieأبو كعب علاء الدينPas encore d'évaluation
- SY20Document17 pagesSY20Karim CKPas encore d'évaluation
- TP 1Document8 pagesTP 1mannai anwerPas encore d'évaluation
- 1 Sujet BE 1 2 3 2022 RegulDocument6 pages1 Sujet BE 1 2 3 2022 RegulBaptiste CapaiPas encore d'évaluation
- 4si - Devoir de Synthèse N° - 2Document4 pages4si - Devoir de Synthèse N° - 2Faycel SaoudiPas encore d'évaluation
- Mini Projet Bonne VersionDocument1 pageMini Projet Bonne Versionsambe.elPas encore d'évaluation
- Document Réponse TP2 PID - Num 2022 - 2023Document10 pagesDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanPas encore d'évaluation
- Devoir-De-Synthèse-N°3-Exemple - 10Document2 pagesDevoir-De-Synthèse-N°3-Exemple - 10Hadj Hani Abed ElhamidPas encore d'évaluation
- TP°3 Les Régulateurs (P, PD, PI, PID)Document5 pagesTP°3 Les Régulateurs (P, PD, PI, PID)ismail.moussaPas encore d'évaluation
- TP2 Auto 5Document2 pagesTP2 Auto 5ismail.moussaPas encore d'évaluation
- TP3 Auto 5Document2 pagesTP3 Auto 5ismail.moussaPas encore d'évaluation
- TP1 Auto 5Document2 pagesTP1 Auto 5ismail.moussaPas encore d'évaluation
- Chapitre 3Document56 pagesChapitre 3ismail.moussa100% (1)
- 3-Patinette Electrique PDFDocument4 pages3-Patinette Electrique PDFAhmed AbenPas encore d'évaluation
- Geni Civil m3 2009Document90 pagesGeni Civil m3 2009Benazza TlemcenPas encore d'évaluation
- Liliane PHANZU A Quoi Sert Le Contrôle de GestionDocument5 pagesLiliane PHANZU A Quoi Sert Le Contrôle de GestionLiliane Lina PhanzuPas encore d'évaluation
- Les Structure MixtesDocument29 pagesLes Structure Mixteshoudazereg57% (7)
- Une Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieDocument38 pagesUne Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieNada NadaPas encore d'évaluation
- 2003elakremi Roussel045Document34 pages2003elakremi Roussel045Esther SimeuPas encore d'évaluation
- Le Dauphin Vol 68-Juin 2011Document44 pagesLe Dauphin Vol 68-Juin 2011GCACQPas encore d'évaluation
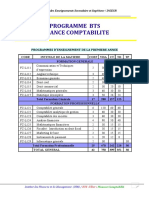
- Programme BTSDocument3 pagesProgramme BTSIssa KABOREPas encore d'évaluation
- E BookDocument13 pagesE BookBOUSSEN RIMPas encore d'évaluation
- Correction QCMDocument7 pagesCorrection QCMMoetaz HnanaPas encore d'évaluation
- Exercices Moteur AsynchroneDocument17 pagesExercices Moteur AsynchroneismailPas encore d'évaluation
- Katalog CH FDocument132 pagesKatalog CH Fbadis000011937Pas encore d'évaluation
- Imagerie OA 2016 1Document95 pagesImagerie OA 2016 1Flora ZePas encore d'évaluation
- Annales Médico-Psychologiques, Revue Psychiatrique Volume 172 Issue 8 2014 (Doi 10.1016/j.amp.2014.08.009) Purper-Ouakil, Diane - Le Trouble Disruptif Avec Dysrégulation de L'humeurDocument4 pagesAnnales Médico-Psychologiques, Revue Psychiatrique Volume 172 Issue 8 2014 (Doi 10.1016/j.amp.2014.08.009) Purper-Ouakil, Diane - Le Trouble Disruptif Avec Dysrégulation de L'humeurmariasr7Pas encore d'évaluation
- Ben Mostefa Daho WailDocument13 pagesBen Mostefa Daho Wailfaroukhan0808Pas encore d'évaluation
- Chapitre IDocument6 pagesChapitre IHachani SafiaPas encore d'évaluation
- Pour Un Usage Responsable Et Acceptable Par La Société Des Technologies de SécuritéDocument68 pagesPour Un Usage Responsable Et Acceptable Par La Société Des Technologies de SécuritéddufourtPas encore d'évaluation
- Annexe TP4Document2 pagesAnnexe TP4Zied GandouziPas encore d'évaluation
- Disjoncteur Moteur Magnetothermique ENTDocument3 pagesDisjoncteur Moteur Magnetothermique ENTMame ware DiagnePas encore d'évaluation
- Évaluation Certificative - Ce1d 2017 - Mathématiques - Questionnaires Version Standard Ressource 13980Document40 pagesÉvaluation Certificative - Ce1d 2017 - Mathématiques - Questionnaires Version Standard Ressource 13980ABDELHAK DRIOUCHEPas encore d'évaluation
- TrajectoiresDocument8 pagesTrajectoiresDenis TuralicPas encore d'évaluation
- VDocument7 pagesVعثمان البريشيPas encore d'évaluation
- Data Scientist Les Fondamentaux de La Data Science - OFDS - PLBDocument4 pagesData Scientist Les Fondamentaux de La Data Science - OFDS - PLBAzerPas encore d'évaluation
- 1730e Hydro-India BD-1Document2 pages1730e Hydro-India BD-1christianPas encore d'évaluation
- Exercices Avec Solutions Sur Le Processus StochastiquesDocument15 pagesExercices Avec Solutions Sur Le Processus Stochastiquessahnoune aliPas encore d'évaluation
- Chapitre 3-Equations DifférentiellesDocument23 pagesChapitre 3-Equations DifférentiellesLøü LõüPas encore d'évaluation
- Info Niv1 Cours2 FRDocument6 pagesInfo Niv1 Cours2 FRDjamilaTalebPas encore d'évaluation
- Concentration Et Spécialisation DesDocument44 pagesConcentration Et Spécialisation DesFakher HouassaPas encore d'évaluation
- DS1-COR-Lavage PrepayeDocument4 pagesDS1-COR-Lavage PrepayeMouad MemniPas encore d'évaluation
- 05 Spectrometrie de Masse PDFDocument7 pages05 Spectrometrie de Masse PDFSalma OugriPas encore d'évaluation