Vous aimerez peut-être aussi
- Correction TDn°1Document6 pagesCorrection TDn°1Zidi NesimPas encore d'évaluation
- TP2 Asp GBM3-LMDDocument4 pagesTP2 Asp GBM3-LMDDONIA JBELIPas encore d'évaluation
- Exercices Corrigés Microcontrôleur Du Bac Technique en TunisieDocument28 pagesExercices Corrigés Microcontrôleur Du Bac Technique en TunisieLacina Bakayoko50% (2)
- DCorrigé FinalDocument4 pagesDCorrigé FinalAbdelfatteh BoukattayaPas encore d'évaluation
- Fonction Convertir Moteurs Pas A Pas Resume Et ExercicesDocument4 pagesFonction Convertir Moteurs Pas A Pas Resume Et Exercicesmohammed el azhari100% (1)
- Upload - Série D'exercices N°10-Pic-2014-2015-CorrectionDocument28 pagesUpload - Série D'exercices N°10-Pic-2014-2015-CorrectionHabib Ben Ammar100% (2)
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- DS3-4ST_Système-Climatisation-automobile_DTDocument4 pagesDS3-4ST_Système-Climatisation-automobile_DTNejib JallouliPas encore d'évaluation
- TD 2Document5 pagesTD 2adda chariPas encore d'évaluation
- Annexes Mikropascal 1Document6 pagesAnnexes Mikropascal 1Mohamed Ali TaheurPas encore d'évaluation
- Control Mega2Document1 pageControl Mega2Sami MazouzPas encore d'évaluation
- DS1 DT TSPDocument5 pagesDS1 DT TSPMouad MemniPas encore d'évaluation
- Série API 3TechDocument4 pagesSérie API 3TechAissa IsmailPas encore d'évaluation
- Devoir de Contrôle N°2 2010 2011 (Abdallah Raouafi)Document4 pagesDevoir de Contrôle N°2 2010 2011 (Abdallah Raouafi)Nidhal AbidiPas encore d'évaluation
- Technique CDocument8 pagesTechnique CMahdi NjehPas encore d'évaluation
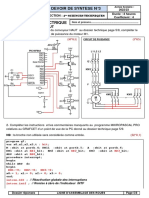
- Devoir de Synthèse N°3 - Génie Électrique - 3ème Technique (2014-2015) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°3 - Génie Électrique - 3ème Technique (2014-2015) MR Raouafi AbdallahAbdelhakim Ebdelli100% (3)
- Série D - Exercices N°9-3Tech-Pic PDFDocument11 pagesSérie D - Exercices N°9-3Tech-Pic PDFlhoussain100% (1)
- TD Percage de PieceDocument5 pagesTD Percage de Piecevalou cnPas encore d'évaluation
- Travaux Pratiques HYDRAULIQUESDocument53 pagesTravaux Pratiques HYDRAULIQUESMoncef NemriPas encore d'évaluation
- DT_DS2_3ST_23_24Document7 pagesDT_DS2_3ST_23_24Nejib JallouliPas encore d'évaluation
- Le Pic 16f84 Partie 1 CoursDocument6 pagesLe Pic 16f84 Partie 1 CoursKamologne UlrichPas encore d'évaluation
- DS34STDocument7 pagesDS34STZaraki RiodaPas encore d'évaluation
- TP - Micro - A29 - FR - New 6Document2 pagesTP - Micro - A29 - FR - New 6Antonio AL-TabishPas encore d'évaluation
- Program at Ion de PIC en BASICDocument19 pagesProgram at Ion de PIC en BASICIlham El MourabitPas encore d'évaluation
- Capteur de PhaseDocument8 pagesCapteur de PhaseKhiereddine RahimPas encore d'évaluation
- Devoir Controle 3 2eme s3Document2 pagesDevoir Controle 3 2eme s3Abdelhak GhodhbeniPas encore d'évaluation
- Dossier-Technique-sess-principale2010Document6 pagesDossier-Technique-sess-principale2010Nejib JallouliPas encore d'évaluation
- Microcontrolleur: Traiter 1Document32 pagesMicrocontrolleur: Traiter 1farrouj abdelhamidPas encore d'évaluation
- SondeDocument5 pagesSondekaragaine100% (1)
- Cours MicrocontroleurDocument10 pagesCours MicrocontroleurYahya AIDARAPas encore d'évaluation
- TestDocument5 pagesTestNacer MaatiPas encore d'évaluation
- TP5-1 FeuxDocument6 pagesTP5-1 FeuxsakiinaPas encore d'évaluation
- Inversion de Vitesse Des Moteurs À Courant ContinuDocument8 pagesInversion de Vitesse Des Moteurs À Courant ContinuFayrouz ZozoPas encore d'évaluation
- TD1 BvaDocument5 pagesTD1 BvamohamedPas encore d'évaluation
- Chapitre 4 Les InterruptionsDocument6 pagesChapitre 4 Les InterruptionskaoutarPas encore d'évaluation
- Dos TechDocument3 pagesDos TechNejib JallouliPas encore d'évaluation
- DOSSIER TECHNIQUE ds2Document5 pagesDOSSIER TECHNIQUE ds2ezzinePas encore d'évaluation
- Le Clignotant: 6 RB1 7 RB2 8 RB3 9 RB4 10 RB5 11 RB6 12 RB7 13 VDD 14 RA0 17 RA1 18Document1 pageLe Clignotant: 6 RB1 7 RB2 8 RB3 9 RB4 10 RB5 11 RB6 12 RB7 13 VDD 14 RA0 17 RA1 18AYOUB ESSAIBPas encore d'évaluation
- Corrigé DP1_DS2_3ST_23-24Document4 pagesCorrigé DP1_DS2_3ST_23-24Nejib JallouliPas encore d'évaluation
- AC Interface Controle Courant PorteurDocument17 pagesAC Interface Controle Courant PorteurfakeeeeeeePas encore d'évaluation
- Malaxeur de Sable AutomatiseDocument9 pagesMalaxeur de Sable AutomatiseHamada HamadaPas encore d'évaluation
- DT_DS2_3ST_23_24Document7 pagesDT_DS2_3ST_23_24Nejib JallouliPas encore d'évaluation
- Devoir-de-révision-N2-Dossier-Réponses-RDocument5 pagesDevoir-de-révision-N2-Dossier-Réponses-Rsyrine torjmenPas encore d'évaluation
- Corrigé Type Examen 2018Document5 pagesCorrigé Type Examen 2018أستغفر اللهPas encore d'évaluation
- TD Percage de PieceDocument3 pagesTD Percage de PieceIlyes BeyPas encore d'évaluation
- TD 2 2esaDocument2 pagesTD 2 2esaSetri jobsPas encore d'évaluation
- SequenceurDocument7 pagesSequenceurAgence NouvellePas encore d'évaluation
- TD Percage de PieceDocument3 pagesTD Percage de Pieceoussama100% (1)
- Bac BlancDocument4 pagesBac BlancLabossef LabossefchedlyPas encore d'évaluation
- Afficheur LCD PPTDocument24 pagesAfficheur LCD PPTSeddik MhamdiPas encore d'évaluation
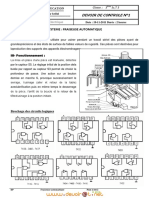
- Devoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachDocument6 pagesDevoir de Contrôle N°1 - Génie Électrique Fraiseuse Automatique - 3ème Technique (2011-2012) MR ImedachGTO FFPas encore d'évaluation
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- Upload - Résumé Du Cours-Microcontroleurs - 2016-2017Document7 pagesUpload - Résumé Du Cours-Microcontroleurs - 2016-2017Habib Ben AmmarPas encore d'évaluation
- Poly TPM P08 Part 2Document3 pagesPoly TPM P08 Part 2Abdelhamid SaighiPas encore d'évaluation
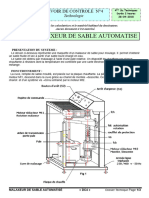
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzPas encore d'évaluation
- TP No 03 Les Afficheurs 7 SegmentsDocument2 pagesTP No 03 Les Afficheurs 7 Segmentsmustapha skanderPas encore d'évaluation
- DS2 DP 2020-2021Document4 pagesDS2 DP 2020-2021Saleh LaifiPas encore d'évaluation
- DC44 17 - 18Document10 pagesDC44 17 - 18jetlaoui frajPas encore d'évaluation
- Le syndrome périodique associé à la cryopyrine (CAPS)D'EverandLe syndrome périodique associé à la cryopyrine (CAPS)Pas encore d'évaluation
- Moteur AsynchroneDocument109 pagesMoteur Asynchroneadilofive100% (1)
- h3 TC Electricite Tr-Chapitre1a Tr-Chapitre5 2552Document37 pagesh3 TC Electricite Tr-Chapitre1a Tr-Chapitre5 2552Salh JerPas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- Recambios-Arranques-Alternadores 05 Magneti Marelli PDFDocument90 pagesRecambios-Arranques-Alternadores 05 Magneti Marelli PDFOmar Orlando Rincon FigueroaPas encore d'évaluation
- ARDJOUNDocument147 pagesARDJOUNAnass EdebbabPas encore d'évaluation
- TDN° 2 - MAsynchDocument4 pagesTDN° 2 - MAsynchAkkad AhmedPas encore d'évaluation
- Champ Tournant - Ge - EtudiantDocument4 pagesChamp Tournant - Ge - EtudiantPapa Sady DiengPas encore d'évaluation
- Moteur Pas A Pas Le VraiDocument61 pagesMoteur Pas A Pas Le Vraiahmed taieb100% (1)
- NSM Manual GMG Mono 3 - 8kva Modelo MS100 PDFDocument4 pagesNSM Manual GMG Mono 3 - 8kva Modelo MS100 PDFRodrigoChavesPas encore d'évaluation
- Relais Ampermetrique Klixon Notice 00Document3 pagesRelais Ampermetrique Klixon Notice 00azertyquerty924Pas encore d'évaluation
- Rapport TP 02 Electrotechnique F2 FormilaireDocument5 pagesRapport TP 02 Electrotechnique F2 FormilaireKristnPas encore d'évaluation
- Transformateurs MonophasésDocument28 pagesTransformateurs MonophasésOussama OussamqPas encore d'évaluation
- Moteur Pas A Pas000Document8 pagesMoteur Pas A Pas000Raid AbdemezianePas encore d'évaluation
- 1732Document69 pages1732Moundir Bachir ElezaarPas encore d'évaluation
- TD N°2 - Modélisation de La MASDocument7 pagesTD N°2 - Modélisation de La MASYoucef BistoPas encore d'évaluation
- Commande Des MCC TD 1 Exo 1 Exo2 2Document9 pagesCommande Des MCC TD 1 Exo 1 Exo2 2Haroun AmirPas encore d'évaluation
- Les Machines AsynchronesDocument19 pagesLes Machines AsynchronesAhmed ElGhafiriPas encore d'évaluation
- E - Les Moteurs Electriques (Rev3b)Document67 pagesE - Les Moteurs Electriques (Rev3b)feriel aissiPas encore d'évaluation
- Machine SynchroneDocument67 pagesMachine Synchronekingfak100% (1)
- La Différence Entre Moteur À Cage Et À Bague PDFDocument1 pageLa Différence Entre Moteur À Cage Et À Bague PDFAbderahman DaouiPas encore d'évaluation
- 0 - Vitesse Des Moteurs AsynchronesDocument4 pages0 - Vitesse Des Moteurs AsynchronesHîChàmBàQàsPas encore d'évaluation
- TP TransfoDocument9 pagesTP TransfoHATATOKOUPas encore d'évaluation
- Dans Un Circuit FerromagnétiqueDocument4 pagesDans Un Circuit Ferromagnétiquemarouane karimPas encore d'évaluation
- TP2 - Commande D'un Moteur Pas - À - Pas - BIPOLAIREDocument12 pagesTP2 - Commande D'un Moteur Pas - À - Pas - BIPOLAIREBoukahil Aymen100% (1)
- Pieces Dremel 395 F0130395DKDocument2 pagesPieces Dremel 395 F0130395DKValentin LawrencePas encore d'évaluation
- Question 2Document5 pagesQuestion 2Dann FiestaPas encore d'évaluation
- Transfo PsimDocument13 pagesTransfo PsimParfumerie Actu'EllePas encore d'évaluation
- Cours Electrotechnique AvancÉ eDocument42 pagesCours Electrotechnique AvancÉ eAbderrahmane WardiPas encore d'évaluation
- Comparatif Machines ElectriquesDocument1 pageComparatif Machines ElectriquesProfesseur BoughrietPas encore d'évaluation
- Chapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifDocument52 pagesChapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifTherence Danel TCHIMAMBOUPas encore d'évaluation