Vous aimerez peut-être aussi
- Algèbre linéaire: Les Grands Articles d'UniversalisD'EverandAlgèbre linéaire: Les Grands Articles d'UniversalisPas encore d'évaluation
- 1 Applications LinéairesDocument64 pages1 Applications LinéairesZelake WilfriedPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Algebre Lineaire Premiere PartieDocument4 pagesAlgebre Lineaire Premiere PartieAs MaaPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- 3 Chap 3Document9 pages3 Chap 3ounallymedPas encore d'évaluation
- Applications LinéairesDocument7 pagesApplications LinéairesHoucinePas encore d'évaluation
- Algebre Chapitre2Document22 pagesAlgebre Chapitre2tahafartouti0Pas encore d'évaluation
- ALGEBRE Séance 5 RedouabyDocument17 pagesALGEBRE Séance 5 RedouabyabdelwahabPas encore d'évaluation
- Chapitre 2Document86 pagesChapitre 2Anouar MddPas encore d'évaluation
- Integration SegmentDocument16 pagesIntegration SegmentMed RhaiouzPas encore d'évaluation
- Application Lineaire en Dimension FinieDocument45 pagesApplication Lineaire en Dimension Finiezain zagoraPas encore d'évaluation
- Applications LinéairesDocument9 pagesApplications LinéairesR-win100% (4)
- Maths: Application LinéairesDocument5 pagesMaths: Application LinéairescollaxPas encore d'évaluation
- Chap4 Applications Lineaires SansligneDocument17 pagesChap4 Applications Lineaires SansligneWang-jaPas encore d'évaluation
- Application Linéaire en PDFDocument2 pagesApplication Linéaire en PDFkhedrimahaPas encore d'évaluation
- Cours Et TD Application LineaireDocument9 pagesCours Et TD Application Lineairemohamed agrebiPas encore d'évaluation
- Algebre 1Document3 pagesAlgebre 1tafrnoutPas encore d'évaluation
- Algèbre 2 Résumé N°04Document10 pagesAlgèbre 2 Résumé N°04khalid camaroPas encore d'évaluation
- 1 Espace VectorielDocument0 page1 Espace VectorielĦätíìm ÉrõssîPas encore d'évaluation
- Algebre2 - Chap5-Applications LinéairesDocument4 pagesAlgebre2 - Chap5-Applications LinéairesIkram SmailiPas encore d'évaluation
- Resume 2Document10 pagesResume 2PhanaPas encore d'évaluation
- Chap 3 Applications LineairesDocument3 pagesChap 3 Applications Lineairesdionguesaliou873Pas encore d'évaluation
- Cours - Automorphismes Orthogonaux Et Matrices OrthogonalesDocument9 pagesCours - Automorphismes Orthogonaux Et Matrices OrthogonalesamenzouPas encore d'évaluation
- V Appli LinDocument17 pagesV Appli Lin2ste3Pas encore d'évaluation
- Algebre 21-22 CHP 1-2-3Document15 pagesAlgebre 21-22 CHP 1-2-3Israël AYEWOUPas encore d'évaluation
- Chapitre 2 Applications LinéairesDocument12 pagesChapitre 2 Applications LinéairesImy MezPas encore d'évaluation
- Cha 14 - E V Et Applications LinéairesDocument5 pagesCha 14 - E V Et Applications LinéairesMoustapha Bassirou NianePas encore d'évaluation
- Struc 1Document8 pagesStruc 1Arij ChouchenePas encore d'évaluation
- Cours 6 ALDFDocument18 pagesCours 6 ALDFKabrel KamelaPas encore d'évaluation
- dm13 EVDocument4 pagesdm13 EVothmane alaouiPas encore d'évaluation
- Cours - Isometries Vectorielles Et Matrices OrthogonalesDocument8 pagesCours - Isometries Vectorielles Et Matrices OrthogonalesL'atelier de licornePas encore d'évaluation
- Alg' Ebre Lin Eaire Exercices: Universit e de ToulonDocument48 pagesAlg' Ebre Lin Eaire Exercices: Universit e de ToulonMohamed aminePas encore d'évaluation
- Applications LineairesDocument2 pagesApplications LineairesAdèle TaraPas encore d'évaluation
- Applications Linéaires CoursDocument10 pagesApplications Linéaires Courska.Pas encore d'évaluation
- Cours 2Document18 pagesCours 2Ako BeatsPas encore d'évaluation
- App Lineaire - Univ Lille PDFDocument8 pagesApp Lineaire - Univ Lille PDFismailPas encore d'évaluation
- Resume App Lineaire NBDocument6 pagesResume App Lineaire NBsatirPas encore d'évaluation
- Théorie Des Graphes Et CombinatoiresDocument67 pagesThéorie Des Graphes Et CombinatoiresTarek BouazzaPas encore d'évaluation
- TD2S2-20222023 230304 202021Document3 pagesTD2S2-20222023 230304 202021Sara ESSAOUDYPas encore d'évaluation
- Bertault C. Geometrie Euclidienne Du Plan Et de L'espaceDocument15 pagesBertault C. Geometrie Euclidienne Du Plan Et de L'espaceMario PuppiPas encore d'évaluation
- Applications LinéairesDocument8 pagesApplications LinéairesJalal BendaoudPas encore d'évaluation
- Alg3 ch4Document19 pagesAlg3 ch4Ibrahim NchouapinePas encore d'évaluation
- TD Automorphismes Orthogonaux Cor PDFDocument9 pagesTD Automorphismes Orthogonaux Cor PDFAlgèbre PC - PTPas encore d'évaluation
- Cours 1Document14 pagesCours 1Ako BeatsPas encore d'évaluation
- Applications LinéairesDocument19 pagesApplications LinéairesBakrim OumaimaPas encore d'évaluation
- Endomorphismes CycliquesDocument2 pagesEndomorphismes CycliquesSalh JerPas encore d'évaluation
- Euclidien Hermitien - 2021 22Document5 pagesEuclidien Hermitien - 2021 22Walter RafaPas encore d'évaluation
- Endomorphismes Des Espaces Euclidiens - Endomorphisme AutoadjointDocument4 pagesEndomorphismes Des Espaces Euclidiens - Endomorphisme AutoadjointHamza PrintoOsPas encore d'évaluation
- Espaces VectorielsDocument5 pagesEspaces VectorielsolphebusPas encore d'évaluation
- L1alg Lin TD5Document4 pagesL1alg Lin TD5Walid MikdamePas encore d'évaluation
- Automorphismes Orthogonaux Et Matrices OrthogonalesDocument10 pagesAutomorphismes Orthogonaux Et Matrices OrthogonalesKarime AminePas encore d'évaluation
- Fonctions en Seconde 4Document24 pagesFonctions en Seconde 4Ahmed Lamine Bara Ford LoPas encore d'évaluation
- Ec6 14-15Document21 pagesEc6 14-15Coul AdamoPas encore d'évaluation
- Serie 2 Alg2 (A.L)Document1 pageSerie 2 Alg2 (A.L)Morad ChelgmPas encore d'évaluation
- PB 1 TSIDocument3 pagesPB 1 TSIMohamed OOPas encore d'évaluation
- Cours Algèbre1 Seq 2 Applications LinéairesDocument19 pagesCours Algèbre1 Seq 2 Applications LinéairesYaya TOUREPas encore d'évaluation
- Algèbe2 Chapi 2Document8 pagesAlgèbe2 Chapi 2amolaPas encore d'évaluation
- Theorie Des EnsemblesDocument10 pagesTheorie Des EnsemblesKhadija Ben MiledPas encore d'évaluation
- Cours - Injections, Surjections, BijectionsDocument10 pagesCours - Injections, Surjections, BijectionsElkana EsaiePas encore d'évaluation
- Support de Cours Semaine 5 - GestionDocument7 pagesSupport de Cours Semaine 5 - GestionKlaÿ calsüsPas encore d'évaluation
- Devoir Semaine 2Document1 pageDevoir Semaine 2Klaÿ calsüsPas encore d'évaluation
- Devoir Semaine 4yDocument1 pageDevoir Semaine 4yKlaÿ calsüsPas encore d'évaluation
- Devoir Semaine 5yDocument1 pageDevoir Semaine 5yKlaÿ calsüsPas encore d'évaluation
- Support de Cours Seance 6Document8 pagesSupport de Cours Seance 6maverickberry705Pas encore d'évaluation
- Indice de Volatilité 75Document28 pagesIndice de Volatilité 75Klaÿ calsüs100% (1)
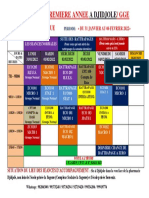
- Version 30 JANV TD 1ere ANNEE FASEG SEMAINE DU 31 JANVIER AU 06 FEVRIERDocument1 pageVersion 30 JANV TD 1ere ANNEE FASEG SEMAINE DU 31 JANVIER AU 06 FEVRIERKlaÿ calsüsPas encore d'évaluation
- Indice de Volatilité 75Document28 pagesIndice de Volatilité 75Klaÿ calsüs100% (1)
- Comptabilité TFE AUDCIF 2Document61 pagesComptabilité TFE AUDCIF 2Klaÿ calsüsPas encore d'évaluation
- Into À Comp NatDocument150 pagesInto À Comp NatKlaÿ calsüsPas encore d'évaluation
- Algebre Linéaire Du 11 Mai - 2 PDFDocument48 pagesAlgebre Linéaire Du 11 Mai - 2 PDFFlorentux AzitiuxPas encore d'évaluation
- Guide de Redaction Articles de Qualite V5Document10 pagesGuide de Redaction Articles de Qualite V5hamzaPas encore d'évaluation
- Indice de Volatilité 75Document28 pagesIndice de Volatilité 75Klaÿ calsüs100% (1)
- Comment Gagner Sur 5eurosDocument27 pagesComment Gagner Sur 5eurosmarius Branco100% (1)
- Math MatricesDocument3 pagesMath Matricesyousfi majdPas encore d'évaluation
- ECT2-Cours Chapitre 8 Version ProfDocument29 pagesECT2-Cours Chapitre 8 Version ProfElhasbis ZakariaPas encore d'évaluation
- Polynôme de Tchebychev Et Approximation UniformeDocument2 pagesPolynôme de Tchebychev Et Approximation UniformekafandoPas encore d'évaluation
- DistributionsDocument96 pagesDistributionsAbdesslam GuennouniPas encore d'évaluation
- Fiches (Math)Document7 pagesFiches (Math)Fadhul Abdouroihamane DjiramePas encore d'évaluation
- EZZINE Mannuel CC Algèbre 2Document39 pagesEZZINE Mannuel CC Algèbre 2elhadri.mohamedyassinePas encore d'évaluation
- Exo de Mesures Et IntegrationDocument26 pagesExo de Mesures Et IntegrationKOTCHI kouadio Fabrice100% (1)
- Introduction À La Théorie Des GraphesDocument6 pagesIntroduction À La Théorie Des Graphesyamanisalma044Pas encore d'évaluation
- CH05 Alg LinDocument15 pagesCH05 Alg LinLoïc MBELE KASTHANEPas encore d'évaluation
- TD Methodes Numériques 2022-2023Document3 pagesTD Methodes Numériques 2022-2023Daniel KinyockPas encore d'évaluation
- 06 ParcourslargeurDocument8 pages06 ParcourslargeurtouzajohanPas encore d'évaluation
- Polynômes de BernsteinDocument3 pagesPolynômes de BernsteinlamsafPas encore d'évaluation
- Resumes Cours Spe V 2Document180 pagesResumes Cours Spe V 2Rita El YaakoubiPas encore d'évaluation
- DS 04 Derivation - CorrigeDocument5 pagesDS 04 Derivation - Corrigeanh thu TranPas encore d'évaluation
- Tangente PDFDocument1 pageTangente PDFAzzeddine DahbiPas encore d'évaluation
- Groupes Symétriques Et DetDocument4 pagesGroupes Symétriques Et DetAbdellatif Elouarrate100% (1)
- Evn 1Document75 pagesEvn 1Walid El Bahar100% (1)
- TD Ar 3 CorDocument13 pagesTD Ar 3 CorHoussein EL GHARSPas encore d'évaluation
- Bord Enstp 2016Document138 pagesBord Enstp 2016kwamo emile97% (35)
- Injection, Surjection, BijectionDocument4 pagesInjection, Surjection, Bijectionossama100% (2)
- L1 FdM1 TD4 Correction 1Document19 pagesL1 FdM1 TD4 Correction 1Balkhis AdenPas encore d'évaluation
- Méthodes Numériques-TPDocument21 pagesMéthodes Numériques-TPHindPas encore d'évaluation
- Integral Es General I SeesDocument3 pagesIntegral Es General I SeeshassaPas encore d'évaluation
- Résolution - Des - Équations - Différentielles - Par - Méthode - de - Différence - Finie (2) - CopieDocument38 pagesRésolution - Des - Équations - Différentielles - Par - Méthode - de - Différence - Finie (2) - Copieoumaimahajjouli783Pas encore d'évaluation
- Intégration, Chapitre 9Document130 pagesIntégration, Chapitre 9Fouzia BadiPas encore d'évaluation
- Livre Du Professeur Mathématiques Terminale SDocument22 pagesLivre Du Professeur Mathématiques Terminale SL0ck0ut100% (1)
- Les Matrices TDDocument2 pagesLes Matrices TDZehnouni AbderezakPas encore d'évaluation
- 2.3 Analyse 1 - Optimisation Sans ContrainteDocument22 pages2.3 Analyse 1 - Optimisation Sans Contrainteأبو أحمد الساحليPas encore d'évaluation
- TPnumero 6 Groupe 2 TIENDJEU ET NKENEDocument6 pagesTPnumero 6 Groupe 2 TIENDJEU ET NKENEDiouf NgaleuPas encore d'évaluation
- CC1 2018 Correction Sujet1Document4 pagesCC1 2018 Correction Sujet1Missi pssaPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation