Vous aimerez peut-être aussi
- Cahier Meca 4 STDocument150 pagesCahier Meca 4 STMohamed Mtaallah89% (18)
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Magnétisme Et SupraconductivitéDocument479 pagesMagnétisme Et SupraconductivitéMohamed NABHANIPas encore d'évaluation
- Corrige TD N°7 FraisageDocument27 pagesCorrige TD N°7 FraisageManu CocoPas encore d'évaluation
- Série D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHADocument24 pagesSérie D'exercices - Génie Mécanique - Variéte - Bac Technique (2019-2020) MR BEN AMMAR MUSTAPHAElarbi Jaffel100% (3)
- DPmecaniqueDocument4 pagesDPmecaniquelou louPas encore d'évaluation
- Cycle4P2SP0Ch5T4 Exercices Tensions CourantsDocument4 pagesCycle4P2SP0Ch5T4 Exercices Tensions CourantsDarryl Bifounou LeyendzePas encore d'évaluation
- 4 SC Tech Ds2 2016 17 DPGM Rayons X 2Document4 pages4 SC Tech Ds2 2016 17 DPGM Rayons X 2DHia Ben AichaPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- C Gilbert - Exercice Essais Pressio Pieux Corrige-2Document22 pagesC Gilbert - Exercice Essais Pressio Pieux Corrige-2ishaq AllalPas encore d'évaluation
- Cons Meca s3 1er GR 2017Document7 pagesCons Meca s3 1er GR 2017Simo Stit100% (1)
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Tayahi100% (1)
- Atelier de Fabrication: Module D'industrialisation1Document9 pagesAtelier de Fabrication: Module D'industrialisation1skander cristoPas encore d'évaluation
- Sujet DEC TGDocument4 pagesSujet DEC TGMouhamadou Moustapha DIOPPas encore d'évaluation
- ما فاتك شئ - Flexion - plane - simpleDocument7 pagesما فاتك شئ - Flexion - plane - simpleBraiki EyaPas encore d'évaluation
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleDocument6 pagesContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriPas encore d'évaluation
- 63bafd33cd0d3 ما فاتك شئ Flexion Charges Réparties 2023Document7 pages63bafd33cd0d3 ما فاتك شئ Flexion Charges Réparties 2023Braiki EyaPas encore d'évaluation
- ExamenDocument9 pagesExamenHamza HAMMADIPas encore d'évaluation
- DS4 6è Maths Mars 2021Document2 pagesDS4 6è Maths Mars 2021Michèle Laura ATEUTCHIA TONMEZENGPas encore d'évaluation
- Éléments de Transmission de MouvementDocument7 pagesÉléments de Transmission de MouvementMohsen Laabidi100% (1)
- Devoir de Contrôle N°2 2009 2010 (Gasmi) (Bouhajla)Document4 pagesDevoir de Contrôle N°2 2009 2010 (Gasmi) (Bouhajla)Esser DridiPas encore d'évaluation
- Examen 2013Document4 pagesExamen 2013Brahim MouhcinePas encore d'évaluation
- Xdevoir de Contrôle N°1 - 1s Samir11Document16 pagesXdevoir de Contrôle N°1 - 1s Samir11Ssantrino OnirtnassPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahFethi BenmassoudePas encore d'évaluation
- FD13 - Test Prérequis - Distribution-Technicien Lignes MT&BT - (5-6 - )Document4 pagesFD13 - Test Prérequis - Distribution-Technicien Lignes MT&BT - (5-6 - )bouamoud4Pas encore d'évaluation
- Cons Meca s3 1er GR 2017 PDFDocument7 pagesCons Meca s3 1er GR 2017 PDFTafotchin Kone100% (1)
- Les Engrenages: Transmission Avec Modification de VitesseDocument9 pagesLes Engrenages: Transmission Avec Modification de VitesseMohamed aziz ben sassiPas encore d'évaluation
- TFM Technologie Professionnelle EFM REGIONAL 2020-2021 v2Document3 pagesTFM Technologie Professionnelle EFM REGIONAL 2020-2021 v2badr hadriPas encore d'évaluation
- UntitledDocument9 pagesUntitledYassine FadilPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Machine À Cambrer - 2ème Sciences Exp (2011-2012) MR NouarDocument4 pagesDevoir de Contrôle N°1 - Technologie Machine À Cambrer - 2ème Sciences Exp (2011-2012) MR Nouarأبوأحمد الجزيريPas encore d'évaluation
- Rapport Be2 G33Document72 pagesRapport Be2 G33RIVALDO JUNINHO ZINEDINE ADIKPETOPas encore d'évaluation
- Devoir 1 Modele 1 Si 2 Bac SM B Semestre 2Document9 pagesDevoir 1 Modele 1 Si 2 Bac SM B Semestre 2nosilinPas encore d'évaluation
- Ds 2012Document4 pagesDs 2012MahdinymosPas encore d'évaluation
- Série de Révision2 (DR) (Corrigé)Document6 pagesSérie de Révision2 (DR) (Corrigé)Wagih MrassiPas encore d'évaluation
- Amélioration de La Productivité Du Câble Famille ARVFVDocument69 pagesAmélioration de La Productivité Du Câble Famille ARVFVMed TridPas encore d'évaluation
- C.R Evaluation GRP 14Document3 pagesC.R Evaluation GRP 14Mehdi BKPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Transfert Des Pièces - 1ère AS (2013-2014) MR Chelbi ZouhaierDocument3 pagesDevoir de Contrôle N°1 - Technologie Poste Automatique de Transfert Des Pièces - 1ère AS (2013-2014) MR Chelbi Zouhaierahmed tounsiPas encore d'évaluation
- Transmettre AMV 2STE2014 PDFDocument36 pagesTransmettre AMV 2STE2014 PDFmasteratsii100% (1)
- Tfe Tshinyam Tetek Merveil Bac 3 Elm DefenseDocument79 pagesTfe Tshinyam Tetek Merveil Bac 3 Elm DefenseMerveil Tshinyam getPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDhia Cherni100% (1)
- Examen Mecanique Appliqué 2021Document3 pagesExamen Mecanique Appliqué 2021riadhPas encore d'évaluation
- Kermadi TachriftDocument108 pagesKermadi TachriftAhmed FarebPas encore d'évaluation
- DEEA - FF. Synthèse N°1 - SujetDocument13 pagesDEEA - FF. Synthèse N°1 - SujetAbdessalam ShPas encore d'évaluation
- Guidage Rotation App4Document4 pagesGuidage Rotation App4Oussama MabroukPas encore d'évaluation
- DS2 1AS 2020 2021 Version ÉlèveDocument6 pagesDS2 1AS 2020 2021 Version ÉlèveYoussef TENNICHPas encore d'évaluation
- Devoir de Synthèse N°1 2018 2019 (MR Kmimech Adel)Document5 pagesDevoir de Synthèse N°1 2018 2019 (MR Kmimech Adel)boubaker marzouguiPas encore d'évaluation
- TP Tableur EcDocument5 pagesTP Tableur EcVirgil LefevrePas encore d'évaluation
- Bts Blanc 2 Misp-Cme 2021-2022Document8 pagesBts Blanc 2 Misp-Cme 2021-2022Ben Moustapha DembelePas encore d'évaluation
- Act2 (Tendeur de Courroie) P218-224Document7 pagesAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouPas encore d'évaluation
- Bts Blanc Misp Juin 2023 NewDocument12 pagesBts Blanc Misp Juin 2023 NewSaïd Oumar GbanePas encore d'évaluation
- BTP PFA CharpenteeDocument97 pagesBTP PFA CharpenteechaimakortobaniPas encore d'évaluation
- DS1-DP-Carreaux CeramiquesDocument4 pagesDS1-DP-Carreaux CeramiquesMouad Memni100% (1)
- Sujet 1Document10 pagesSujet 1وسيم زعفوريPas encore d'évaluation
- Ds2-2ème-Pot de Fleurs 2020-2021Document10 pagesDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidPas encore d'évaluation
- Positionnement de Mécanique AppliquéeDocument7 pagesPositionnement de Mécanique Appliquéenaceur rbiiPas encore d'évaluation
- Chap 9 - Contrôle CORRIGE - SiteDocument4 pagesChap 9 - Contrôle CORRIGE - SitetahamkadPas encore d'évaluation
- IssamDocument4 pagesIssamAbdelmajid ZouaghiPas encore d'évaluation
- Cours Math 5ème 2Document89 pagesCours Math 5ème 2Vainqueur KponssouPas encore d'évaluation
- Transmission de Puissance 1ère AnnéeDocument7 pagesTransmission de Puissance 1ère Annéenouha meddebPas encore d'évaluation
- Devoir de Synthèse N 1Document5 pagesDevoir de Synthèse N 1kachtirajaPas encore d'évaluation
- Devoir N°1 Tramway SMB Lamzibri 2023Document8 pagesDevoir N°1 Tramway SMB Lamzibri 2023taziadambkPas encore d'évaluation
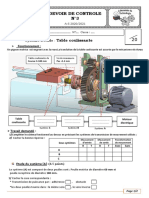
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- DC N°1 - 1ère - Machine de Percage Et Lamage 2020-2021Document4 pagesDC N°1 - 1ère - Machine de Percage Et Lamage 2020-2021Adam BensaidPas encore d'évaluation
- Cinétiques - Protected Ulmer ChaysDocument42 pagesCinétiques - Protected Ulmer ChaysZoheir RamdanePas encore d'évaluation
- Organisation Et Gestion de La MaintenanceDocument29 pagesOrganisation Et Gestion de La MaintenanceNtui Junior100% (1)
- 2 - Notions de BaseDocument55 pages2 - Notions de BaseQOTEYBA AOUNIPas encore d'évaluation
- Chapitre 03Document10 pagesChapitre 03kawterPas encore d'évaluation
- 230307-LTARC1262 MaçonnerieDocument124 pages230307-LTARC1262 MaçonnerieJuloPas encore d'évaluation
- TD Frottement Arc BoutementDocument5 pagesTD Frottement Arc BoutementAHMED ghribiPas encore d'évaluation
- Partie FinalDocument26 pagesPartie FinalSalim BelkhirPas encore d'évaluation
- Le Pouvoir de Nos VibrationsDocument17 pagesLe Pouvoir de Nos VibrationsShell Scott100% (1)
- Cor Exam SDM S1 2019 2020 v1p2Document2 pagesCor Exam SDM S1 2019 2020 v1p2M'pounguiPas encore d'évaluation
- Microsonde Nucléaire: Principe Et AppareillageDocument16 pagesMicrosonde Nucléaire: Principe Et AppareillageSabin SamPas encore d'évaluation
- 1ES - Ch02 - Le-Second DegreDocument10 pages1ES - Ch02 - Le-Second DegreKhadidiatou SarrPas encore d'évaluation
- Chapitre 4 TDSDocument5 pagesChapitre 4 TDSHoussem AimenePas encore d'évaluation
- TD03 ProbaDocument2 pagesTD03 ProbaYoussef ChoundiPas encore d'évaluation
- Math TestDocument39 pagesMath TestsalopniggrPas encore d'évaluation
- SN045a-Rigidité Des Pieds de Poteaux À Des Fins D'analyse GlobaleDocument10 pagesSN045a-Rigidité Des Pieds de Poteaux À Des Fins D'analyse GlobaleWissem TaktakPas encore d'évaluation
- Numero 30Document7 pagesNumero 30mezouedPas encore d'évaluation
- Devoir de Synthèse N°1 - Math - Bac Mathématiques (2015-2016) MR BOUHOUCH AMEURDocument3 pagesDevoir de Synthèse N°1 - Math - Bac Mathématiques (2015-2016) MR BOUHOUCH AMEURAli SkimaPas encore d'évaluation
- Elec Chap11Document33 pagesElec Chap11thebastienproductionPas encore d'évaluation
- T.P. Moment D'inertie Et Énergie Cinétique de Rotation: R M R M EDocument3 pagesT.P. Moment D'inertie Et Énergie Cinétique de Rotation: R M R M EYazine ZeidPas encore d'évaluation
- A5 ModelisationdessaDocument44 pagesA5 Modelisationdessaseye abdou azizPas encore d'évaluation
- Fiche de Suivi ÉlèveDocument2 pagesFiche de Suivi ÉlèveVanessa BossartPas encore d'évaluation
- Fiche SpectrophotométrieDocument3 pagesFiche Spectrophotométriemohammed younes100% (1)
- Mlr-Inegalites de Holder Et MinkowskiDocument9 pagesMlr-Inegalites de Holder Et MinkowskiNwantou TchouameniPas encore d'évaluation
- Annabelle - Dufourcq - 157-173 Svet Literatury Un Monde Sans AnimauxDocument17 pagesAnnabelle - Dufourcq - 157-173 Svet Literatury Un Monde Sans AnimauxAnn DufourcqPas encore d'évaluation
- Grand Orale SVT 2Document3 pagesGrand Orale SVT 2ÉlisePas encore d'évaluation
- Devoir 5 - SE - Math + CorrectionDocument4 pagesDevoir 5 - SE - Math + CorrectionMohammad AL FattahPas encore d'évaluation
- 2016 - Cyberlibris - Collection SanteDocument96 pages2016 - Cyberlibris - Collection SanteBlaise Ulrich Junior KocoraPas encore d'évaluation