Vous aimerez peut-être aussi
- Rapport de Stage LEAR CorporationDocument106 pagesRapport de Stage LEAR CorporationFleurita Fofita50% (6)
- Rapport de Stage TramwayDocument44 pagesRapport de Stage TramwayLouBna Ait67% (3)
- Rapport Bentizi Khalid PfeDocument60 pagesRapport Bentizi Khalid PfeYasmine Aouni100% (2)
- Rapport Final Imt Ref - Inconnu (E)Document82 pagesRapport Final Imt Ref - Inconnu (E)tazi riffi harounePas encore d'évaluation
- Rapport PFE 2019 OCP - IBRAHIM HOUSSEINI AdammodifDocument131 pagesRapport PFE 2019 OCP - IBRAHIM HOUSSEINI Adammodifkadri daouda100% (2)
- Rapport de Stage Camrail 2023 (1) - CopieDocument69 pagesRapport de Stage Camrail 2023 (1) - CopieFondjo Tchouongouang Landry Mael100% (2)
- Belkherraz AbdessamadDocument94 pagesBelkherraz AbdessamadBill Kalisto100% (2)
- Rapport Finale PFE - MergedDocument124 pagesRapport Finale PFE - MergedEl Mouatez Faker100% (1)
- Management des organisations publiques - 2e édition, revue et corrigéeD'EverandManagement des organisations publiques - 2e édition, revue et corrigéePas encore d'évaluation
- TD 34 Corrigé - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ETDocument4 pagesTD 34 Corrigé - Systèmes Séquentiels - GRAFCET - Structure de Base OU Et ETYassino Wick0% (2)
- Etude AMDEC Et Mise en Place Du Planning PDFDocument108 pagesEtude AMDEC Et Mise en Place Du Planning PDFSoufiane100% (2)
- Mbaga PDFDocument99 pagesMbaga PDFLePrince MoukokoPas encore d'évaluation
- Rapport de Stage - ONEP (Samah El Qassah)Document81 pagesRapport de Stage - ONEP (Samah El Qassah)AYOUB LOUIZIPas encore d'évaluation
- Hafadi SalmaDocument47 pagesHafadi SalmaBill KalistoPas encore d'évaluation
- Modernisation de L'architecture Et Implementation Des VLANs SecurisésDocument68 pagesModernisation de L'architecture Et Implementation Des VLANs SecurisésOnesphore Shado SINDIHEBURAPas encore d'évaluation
- Version Finale PFEDocument86 pagesVersion Finale PFEyosrsnoussi97Pas encore d'évaluation
- OuradHouria SmahiNora PDFDocument88 pagesOuradHouria SmahiNora PDFsaadeni oumaimaPas encore d'évaluation
- Medical OpenERPDocument90 pagesMedical OpenERPSoussa Ess BarcaPas encore d'évaluation
- File Attente FinaleDocument105 pagesFile Attente FinaleAzmi AbrougPas encore d'évaluation
- Etude Et Automatisation D'une Station de Nettoyage en Place (CIP) Au Niveau de La SARL Tifra-Lait A Base D'un Automate Siemens S7 300Document67 pagesEtude Et Automatisation D'une Station de Nettoyage en Place (CIP) Au Niveau de La SARL Tifra-Lait A Base D'un Automate Siemens S7 300jalloulbaha92Pas encore d'évaluation
- Mémoire Station de Pompage MOSBAH - SEBGAGDocument83 pagesMémoire Station de Pompage MOSBAH - SEBGAGHIND TAROUTPas encore d'évaluation
- Smart-Entreprise Samir PDFDocument76 pagesSmart-Entreprise Samir PDFDali BellaajPas encore d'évaluation
- Mise en Place D'un Réseau EthernetDocument66 pagesMise en Place D'un Réseau EthernetJames Ulrich100% (1)
- Application Supervision Equiment AeriensDocument58 pagesApplication Supervision Equiment Aeriensradwane lourhmatiPas encore d'évaluation
- Electronique D'instrumentation: SpécialitéDocument84 pagesElectronique D'instrumentation: SpécialitéMohamed HaddadPas encore d'évaluation
- Master Sciences Et Techniques Spécialité: Ingénierie MécaniqueDocument108 pagesMaster Sciences Et Techniques Spécialité: Ingénierie MécaniqueMOhmmed taawytPas encore d'évaluation
- KHIAR. IlyasDocument24 pagesKHIAR. IlyassaidPas encore d'évaluation
- Rapport de PfeDocument49 pagesRapport de PfeHidaya SklPas encore d'évaluation
- Rapport FinalDocument81 pagesRapport FinalWilliam DempseyPas encore d'évaluation
- Rapport 1Document9 pagesRapport 1Yassine ZaanounyPas encore d'évaluation
- Mise en Place D'une Solution W - ZOUMHANE Fatimazahra - 2856Document62 pagesMise en Place D'une Solution W - ZOUMHANE Fatimazahra - 2856Samira ElkamelPas encore d'évaluation
- G.seii2020 Elattarsofi ZinebDocument78 pagesG.seii2020 Elattarsofi ZinebSabah KabbouPas encore d'évaluation
- These AzoughDocument136 pagesThese AzoughVictoria VictoriaPas encore d'évaluation
- Systeme de Supervision Des Tem - GAMAL Abdelhamid - 3374Document75 pagesSysteme de Supervision Des Tem - GAMAL Abdelhamid - 3374Ibtihel MechleouiPas encore d'évaluation
- Microsoft Word - Rapport PFE V3.docx - HPDocument72 pagesMicrosoft Word - Rapport PFE V3.docx - HPhamza.ahbachPas encore d'évaluation
- Rapport Stage Khella Mina PFADocument39 pagesRapport Stage Khella Mina PFAOumaima BetmiPas encore d'évaluation
- Contribution A La Mise en Plac - FATIHI Sophia - 520Document65 pagesContribution A La Mise en Plac - FATIHI Sophia - 520MEHDIPas encore d'évaluation
- Rapport PFE AhmedLehyani-V10Document71 pagesRapport PFE AhmedLehyani-V10Mohamed Kadhem BelghuithPas encore d'évaluation
- 050 2015 PDFDocument109 pages050 2015 PDFMhamdi KhouloudPas encore d'évaluation
- Rapport Du StageDocument24 pagesRapport Du Stageyoussef joynerPas encore d'évaluation
- Amelioration de La Qualificati - BELHAJ Safae - 2902 PDFDocument84 pagesAmelioration de La Qualificati - BELHAJ Safae - 2902 PDFnesrine khouadjaPas encore d'évaluation
- DEDICACESDocument29 pagesDEDICACESVIVENCIOPas encore d'évaluation
- Rapportdestagedufindtude 160329212625 PDFDocument72 pagesRapportdestagedufindtude 160329212625 PDFخواطرPas encore d'évaluation
- RapportDocument95 pagesRapportHoussem HidouriPas encore d'évaluation
- Rakibi F.Z Pfe - 2012Document72 pagesRakibi F.Z Pfe - 2012jedPas encore d'évaluation
- MankourYassine - SitayebMahfoud MasterrrrrrrrrDocument87 pagesMankourYassine - SitayebMahfoud MasterrrrrrrrrMaysam SahliPas encore d'évaluation
- Renovation D'un Sequenceur SEF - BENNANI Ghita - 1055Document62 pagesRenovation D'un Sequenceur SEF - BENNANI Ghita - 1055Seddik Dïķő0% (1)
- 98 M W9 IRIV7 B KB0 Smuj NNF RQL3 KJ KQ 1 UF4 SK2 KL P4Document103 pages98 M W9 IRIV7 B KB0 Smuj NNF RQL3 KJ KQ 1 UF4 SK2 KL P4Alâa HrizPas encore d'évaluation
- Etude Et Réalisation D'une Application Logiciel Interface Graphique (CAO), Simulation Numérique Et Visualisation - MEJDOUBI AbdeDocument71 pagesEtude Et Réalisation D'une Application Logiciel Interface Graphique (CAO), Simulation Numérique Et Visualisation - MEJDOUBI AbdeEdwin RefPas encore d'évaluation
- Redaction de PFEDocument56 pagesRedaction de PFEIchrak madromiPas encore d'évaluation
- DédicacesDocument97 pagesDédicacesEl Hanafi MohamedPas encore d'évaluation
- DCTSLMDocument51 pagesDCTSLMELmokhtar HamrouniPas encore d'évaluation
- PFE Version FinaleDocument100 pagesPFE Version FinaleToufik El AttarPas encore d'évaluation
- Application de Gestion Des Trains Fret - CHERIGUI OmarDocument38 pagesApplication de Gestion Des Trains Fret - CHERIGUI OmarImane OuzaidPas encore d'évaluation
- Conception Et Realisation D'un - BOUAMOR Boujemaa - 3329Document92 pagesConception Et Realisation D'un - BOUAMOR Boujemaa - 3329Sââ MîîrPas encore d'évaluation
- Merged 151002101226 Lva1 App6891Document27 pagesMerged 151002101226 Lva1 App6891طائر اللقلقPas encore d'évaluation
- MemoireDocument77 pagesMemoireAHMED LEHYANI100% (1)
- RapportPFE HouyemDocument79 pagesRapportPFE HouyemSebastian MessiPas encore d'évaluation
- L' Appréciation des performances au travail: De l'individu à l'équipeD'EverandL' Appréciation des performances au travail: De l'individu à l'équipeÉvaluation : 5 sur 5 étoiles5/5 (1)
- L' Injection électronique: Tutoriel et GuideD'EverandL' Injection électronique: Tutoriel et GuideÉvaluation : 5 sur 5 étoiles5/5 (1)
- Éducation motrice et l'éducation psychomotrice au préscolaire et au primaireD'EverandÉducation motrice et l'éducation psychomotrice au préscolaire et au primairePas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- TD 34 - Syst Mes S Quentiels - GRAFCET - Structure de Base OU Et ETDocument4 pagesTD 34 - Syst Mes S Quentiels - GRAFCET - Structure de Base OU Et ETnipoPas encore d'évaluation
- Memoire FinalDocument112 pagesMemoire Finalelmourtajihajar321Pas encore d'évaluation
- La MoucheDocument1 pageLa MoucheDorian Cipi100% (3)
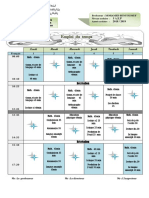
- Emploi Du TempsDocument1 pageEmploi Du TempsSimoPas encore d'évaluation
- Chapitre 5 Langage PertDocument5 pagesChapitre 5 Langage PertyhannjeanPas encore d'évaluation
- Henri BoyerDocument3 pagesHenri BoyerancagataPas encore d'évaluation
- Cours Algo2Document38 pagesCours Algo2Med Amine IfousPas encore d'évaluation
- Le Publipostage PDFDocument2 pagesLe Publipostage PDFIbtissam ZaajPas encore d'évaluation
- Hist2de ch3 Mediterranée - MedievaleDocument11 pagesHist2de ch3 Mediterranée - MedievaleFranck FusterPas encore d'évaluation
- TD D'analyse Numérique 3 SMA S6: Université Sidi Mohamed Ben Abdelah, FèsDocument13 pagesTD D'analyse Numérique 3 SMA S6: Université Sidi Mohamed Ben Abdelah, FèsNabil Satte0% (1)
- Chapitre 1 Systèmes de NumérationsDocument18 pagesChapitre 1 Systèmes de Numérationssouha SPas encore d'évaluation
- T.D de Chimie, Etude de Niveaux Dénergie, BAC 2021Document3 pagesT.D de Chimie, Etude de Niveaux Dénergie, BAC 2021Boriche DivitisPas encore d'évaluation
- Tu 42 FDocument144 pagesTu 42 FFrederic FreemanPas encore d'évaluation
- Écrire Une Lettre FormelleDocument6 pagesÉcrire Une Lettre FormelleJu BlaPas encore d'évaluation
- Maus 2 TexteDocument2 pagesMaus 2 TexteGatinePas encore d'évaluation
- Lettre de Motivation Demande de StageDocument3 pagesLettre de Motivation Demande de StageRyuKen100% (5)
- Cours Théorie de Langages - Grammaires - PR - OuatikDocument17 pagesCours Théorie de Langages - Grammaires - PR - Ouatikyoussef amjahdiPas encore d'évaluation
- 13 - Accidents Vasculaires Cérébraux ISCHEMIQUESDocument21 pages13 - Accidents Vasculaires Cérébraux ISCHEMIQUESkarima karimaPas encore d'évaluation
- 2ndS CompletDocument55 pages2ndS Completsenea1611Pas encore d'évaluation
- Ce2 Evaluation AccentsDocument2 pagesCe2 Evaluation AccentsMaria FavataPas encore d'évaluation
- ĐỀ CƯƠNG ÔN TẬP KẾT THÚC HỌC PHẦN CSLTHH CLBCXGDocument29 pagesĐỀ CƯƠNG ÔN TẬP KẾT THÚC HỌC PHẦN CSLTHH CLBCXGduyen0387431Pas encore d'évaluation
- WINDEV25Document379 pagesWINDEV25borePas encore d'évaluation
- Raffinement Du Bloc de Commande de La Période Inférieure: ÉtabliDocument14 pagesRaffinement Du Bloc de Commande de La Période Inférieure: ÉtabliRobert JeudyPas encore d'évaluation
- Dossier 6 Leçon 4Document5 pagesDossier 6 Leçon 4tamariPas encore d'évaluation
- RT 34Document238 pagesRT 34Ivan BogdanovPas encore d'évaluation
- Projet 02: C'est Un Lieu Exceptionnel Tache FinaleDocument2 pagesProjet 02: C'est Un Lieu Exceptionnel Tache FinaleInes DjeghriPas encore d'évaluation
- Condition PastoraleDocument8 pagesCondition PastoraleadrienPas encore d'évaluation
- GLG Tome1Document90 pagesGLG Tome1Rolls hcollPas encore d'évaluation
- Fonctionnalites WinDev 12Document286 pagesFonctionnalites WinDev 12Ghjgr DffsdaPas encore d'évaluation
- Projet 3 L AppelDocument1 pageProjet 3 L Appellakhalnouna3Pas encore d'évaluation
- Le Passé ComposéDocument8 pagesLe Passé ComposéLavienia Rieska AsmilianaPas encore d'évaluation
- Exam Blanc 03Document4 pagesExam Blanc 03Rania BarcaPas encore d'évaluation