Vous aimerez peut-être aussi
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Contrôle de Servomoteur Avec Un ArduinoDocument2 pagesContrôle de Servomoteur Avec Un ArduinoSas KiPas encore d'évaluation
- 02-Document Ressource Configuration Broche PWMDocument3 pages02-Document Ressource Configuration Broche PWMnawzatPas encore d'évaluation
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- Simulation D'une Carte de Commande A Base de PicDocument63 pagesSimulation D'une Carte de Commande A Base de Pictanweer100% (1)
- Devoir 1 SystDocument4 pagesDevoir 1 SystAmine FalakiPas encore d'évaluation
- Enonce Du TP 2 MicroP Microprocesseurs TP 03 03 10Document3 pagesEnonce Du TP 2 MicroP Microprocesseurs TP 03 03 10abderrazzak2011Pas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 24Document42 pagesCours Microcontrôleur Microprocesseur 24Amatou ArrahmenPas encore d'évaluation
- Calcul SectionDocument1 pageCalcul Sectionchembeu louisPas encore d'évaluation
- El Oufir El MehdiDocument21 pagesEl Oufir El MehdiEl Oufir El MehdiPas encore d'évaluation
- Chapitre 10 Interruptions en MikrocDocument6 pagesChapitre 10 Interruptions en MikrocPapeCheikh SYLLAPas encore d'évaluation
- Notice Prog C MPLAB & Cc5xDocument10 pagesNotice Prog C MPLAB & Cc5xkaimissPas encore d'évaluation
- L'Assembleur Mplab - Ide: Les Outils de DeveloppementDocument13 pagesL'Assembleur Mplab - Ide: Les Outils de DeveloppementTamokouePas encore d'évaluation
- Partie3 Microcontroleur s4 E2iDocument9 pagesPartie3 Microcontroleur s4 E2iMoha BenmohaPas encore d'évaluation
- ArduinoDocument3 pagesArduinoMohamed BrahimiPas encore d'évaluation
- ExamenDocument3 pagesExamenMayssen KaabiPas encore d'évaluation
- Leçon A3-2 - Notion D'interruptionDocument6 pagesLeçon A3-2 - Notion D'interruptionMehdi Bouchami100% (1)
- TD2 MicrocontroleurDocument1 pageTD2 MicrocontroleurimenenouvellePas encore d'évaluation
- Programmation Des Microcontrôleur en C CompilateurDocument11 pagesProgrammation Des Microcontrôleur en C CompilateurOmar MedbouhPas encore d'évaluation
- Rapport Brohage Des AOPDocument5 pagesRapport Brohage Des AOPAli Moustapha NourPas encore d'évaluation
- Option Temps ReelDocument80 pagesOption Temps Reelpriankasy679Pas encore d'évaluation
- TablesDocument3 pagesTablespolodadonPas encore d'évaluation
- TP Instrumentation 2 PDFDocument4 pagesTP Instrumentation 2 PDFAyedi AbderrahmenPas encore d'évaluation
- Variateur de Vitesse Pour Moteur À Courant Continu Par PIC16F876 en MLI (PWM) 12V PDFDocument15 pagesVariateur de Vitesse Pour Moteur À Courant Continu Par PIC16F876 en MLI (PWM) 12V PDFcherif slimPas encore d'évaluation
- Arduino en Technologie: Realisé Par Les Prof: BoushabaDocument9 pagesArduino en Technologie: Realisé Par Les Prof: BoushabaroboticPas encore d'évaluation
- Synthese Des Hacheurs JCRDocument7 pagesSynthese Des Hacheurs JCRDriss GhandiPas encore d'évaluation
- Système À MicroprocesseurDocument43 pagesSystème À MicroprocesseurW DPas encore d'évaluation
- Projet Électronique - Capteur de Son Logiciel À Base Du PIC16F877 + Matlab + ISIS + MikroCDocument22 pagesProjet Électronique - Capteur de Son Logiciel À Base Du PIC16F877 + Matlab + ISIS + MikroCfatimaPas encore d'évaluation
- Tajovimepo Programmation Ladder Exercices Corrigs Polegifujab PDFDocument4 pagesTajovimepo Programmation Ladder Exercices Corrigs Polegifujab PDFMouad MouhoutPas encore d'évaluation
- TP FlowcodeDocument11 pagesTP Flowcodekurts010Pas encore d'évaluation
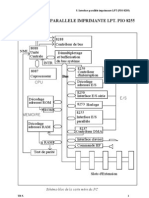
- Programmation de L'interface ParallèleDocument10 pagesProgrammation de L'interface ParallèleAbdeltif BelquorchiPas encore d'évaluation
- TP Introduction Aux Mesures ÉlectriquesDocument6 pagesTP Introduction Aux Mesures ÉlectriquesMateo Pasquier-bodioPas encore d'évaluation
- Bistable MonostableastbleDocument9 pagesBistable Monostableastblelouis ategouaPas encore d'évaluation
- Chapitre 1 EtudiantDocument4 pagesChapitre 1 EtudiantChristianPas encore d'évaluation
- Programme Simple Utilisant RTC DS1307 PDFDocument6 pagesProgramme Simple Utilisant RTC DS1307 PDFsaraPas encore d'évaluation
- TP EA02 AsservissementDocument14 pagesTP EA02 AsservissementnguyenrobotPas encore d'évaluation
- Hadoune OussamaDocument74 pagesHadoune OussamaBen Hassine Imen100% (1)
- ANNEXE: Microcontrôleur PIC Microchip Un MicrocontrôleurDocument7 pagesANNEXE: Microcontrôleur PIC Microchip Un MicrocontrôleurlaghmiPas encore d'évaluation
- Mini Projet Thermomètre À Base de Pic 16F877Document10 pagesMini Projet Thermomètre À Base de Pic 16F877Manel Ouled Ahmed100% (1)
- Abdou. Initiation API Millenium 3Document21 pagesAbdou. Initiation API Millenium 3sethabdellahPas encore d'évaluation
- LPLDocument6 pagesLPLanass sbniPas encore d'évaluation
- Rapport PFE4Document50 pagesRapport PFE4azdinPas encore d'évaluation
- TP ElecII GM2 PDFDocument21 pagesTP ElecII GM2 PDFyoussef MoujanniPas encore d'évaluation
- Pic 16F84 PDFDocument142 pagesPic 16F84 PDFKhaled MAMMAR KOUADRIPas encore d'évaluation
- Programmation Des Timers: 1. ObjectifsDocument5 pagesProgrammation Des Timers: 1. ObjectifsHamza DarrarPas encore d'évaluation
- Lelangagearduino PDFDocument17 pagesLelangagearduino PDFAdil AbouelhassanPas encore d'évaluation
- Compte RenduDocument5 pagesCompte RenduAlaa MessaoudPas encore d'évaluation
- Projet Generateur de Fonction PDFDocument14 pagesProjet Generateur de Fonction PDFLoye PharèsPas encore d'évaluation
- TP11 Gradateurs Mono Et Tri 2Document2 pagesTP11 Gradateurs Mono Et Tri 2mhys3710Pas encore d'évaluation
- Exercice 6 - Alimentation D'une Cisaille - Cours TechniqueDocument1 pageExercice 6 - Alimentation D'une Cisaille - Cours Techniquejames morganPas encore d'évaluation
- TD 6 Eno Corr-2 PDocument3 pagesTD 6 Eno Corr-2 PEs.sabery IsmailPas encore d'évaluation
- Arduino Et Simulink/Matlab® Un Outil Innovant À Coût Réduit Pour Le PrototypageDocument12 pagesArduino Et Simulink/Matlab® Un Outil Innovant À Coût Réduit Pour Le PrototypageYassine MbzPas encore d'évaluation
- EXAMENDocument6 pagesEXAMENAmira DhorbaniPas encore d'évaluation
- RCS Application Du Circuit TcaDocument6 pagesRCS Application Du Circuit TcaChou CђѺµ'Pas encore d'évaluation
- TP LogisimDocument4 pagesTP LogisimPierre GazeillesPas encore d'évaluation
- Remarques Et Astuces de Programmation en AssembleurDocument31 pagesRemarques Et Astuces de Programmation en AssembleuramaniPas encore d'évaluation
- Rapport Générateur de Signaux Version 4Document13 pagesRapport Générateur de Signaux Version 4Mohamed SalamaPas encore d'évaluation
- Convertisseurs TensionDocument19 pagesConvertisseurs TensionkhouloudPas encore d'évaluation
- Alimentation, Stabilisée, Régulée, À Découpage P3-3Document5 pagesAlimentation, Stabilisée, Régulée, À Découpage P3-3bmmostefaPas encore d'évaluation
- Logique MicroDocument7 pagesLogique MicroLoic NkigmouPas encore d'évaluation
- Exercice Regime TNDocument7 pagesExercice Regime TNnawzatPas encore d'évaluation
- 4796 DT E42 Bts Elt Metro2014Document8 pages4796 DT E42 Bts Elt Metro2014nawzatPas encore d'évaluation
- Regime TNDocument2 pagesRegime TNnawzatPas encore d'évaluation
- Courants CC SchneiderDocument3 pagesCourants CC SchneidernawzatPas encore d'évaluation
- Cours Regime ITDocument6 pagesCours Regime ITnawzatPas encore d'évaluation
- TD GradateursDocument19 pagesTD GradateursnawzatPas encore d'évaluation
- TD Regime ITDocument4 pagesTD Regime ITnawzatPas encore d'évaluation
- Courant de Court-CircuitDocument7 pagesCourant de Court-CircuitnawzatPas encore d'évaluation
- Cours CompletDocument37 pagesCours CompletnawzatPas encore d'évaluation
- Schémas Des Liaisons À La Terre Dans Le Monde Et ÉvolutionsDocument24 pagesSchémas Des Liaisons À La Terre Dans Le Monde Et ÉvolutionsMister R100% (1)
- Remedes Des HarmoniquesDocument6 pagesRemedes Des HarmoniquesnawzatPas encore d'évaluation
- Effets Des HarmoniquesDocument13 pagesEffets Des HarmoniquesnawzatPas encore d'évaluation
- Rappels Sur Les Perturbations HarmoniquesDocument12 pagesRappels Sur Les Perturbations HarmoniquesnawzatPas encore d'évaluation
- TD Analyse Des HarmoniquesDocument7 pagesTD Analyse Des HarmoniquesnawzatPas encore d'évaluation
- .. Downloads Brochure ONEE COP22 Online FRDocument16 pages.. Downloads Brochure ONEE COP22 Online FRZakaria ChemichaPas encore d'évaluation
- TP Les Grandeurs de FresnelDocument9 pagesTP Les Grandeurs de Fresnelnawzat100% (1)
- Regime Du NeutreDocument22 pagesRegime Du NeutreelmandoubaPas encore d'évaluation
- TD3 Machine Asynchrone BISDocument2 pagesTD3 Machine Asynchrone BISnawzat100% (1)
- Caalcul de IccDocument42 pagesCaalcul de IccnawzatPas encore d'évaluation
- Oscillateurs TPDocument8 pagesOscillateurs TPMohamed BelaounPas encore d'évaluation
- 8 Examen 2 2012 Laval PDFDocument3 pages8 Examen 2 2012 Laval PDFnawzatPas encore d'évaluation
- 1-Chapitre-1.pdf EPDocument4 pages1-Chapitre-1.pdf EPADAMPas encore d'évaluation
- Examen en Électronique de PuissanceDocument8 pagesExamen en Électronique de PuissancenawzatPas encore d'évaluation
- Moteur À Courant ContinuDocument14 pagesMoteur À Courant Continunawzat100% (5)
- ch30 PDFDocument2 pagesch30 PDFnawzatPas encore d'évaluation
- Test Psychotechnique IFSI Mastermind PDFDocument12 pagesTest Psychotechnique IFSI Mastermind PDFSophie BarriéPas encore d'évaluation
- 1625352Document93 pages1625352nawzatPas encore d'évaluation
- Détermination de La Section Des Canalisations Enterrées TDDocument8 pagesDétermination de La Section Des Canalisations Enterrées TDnawzatPas encore d'évaluation
- Greffe D'un Coeur de Port Sur Un HumainDocument5 pagesGreffe D'un Coeur de Port Sur Un Humaingiogio giogioPas encore d'évaluation
- Le Texte Explicatif ExerciceDocument32 pagesLe Texte Explicatif Exercicenass fowPas encore d'évaluation
- ISPITISDocument21 pagesISPITISPse UdoPas encore d'évaluation
- Le Grafcet2015Document35 pagesLe Grafcet2015api-285116556100% (1)
- Pharmacologie OrthopedieDocument26 pagesPharmacologie OrthopedieAlphaPas encore d'évaluation
- La Ferme Des AnimauxDocument11 pagesLa Ferme Des AnimauxhodaPas encore d'évaluation
- FilesDocument670 pagesFilesSidaliPas encore d'évaluation
- La Pose Du Lambris Bois Et Revêtus PDFDocument6 pagesLa Pose Du Lambris Bois Et Revêtus PDFMamou DeflaouiPas encore d'évaluation
- Memoire PDFDocument36 pagesMemoire PDFSiraj Saad100% (1)
- Fascicule BOST 2017Document142 pagesFascicule BOST 2017Davy Arnold KombilaPas encore d'évaluation
- Mise en Oeuvre BetonDocument73 pagesMise en Oeuvre BetonAbdoul Fatré KienouPas encore d'évaluation
- A La Date de Publication Du Présent Document, Il N'existe Pas de Travaux de Normalisation Internationaux Ou Européens Traitant Du Même SujetDocument14 pagesA La Date de Publication Du Présent Document, Il N'existe Pas de Travaux de Normalisation Internationaux Ou Européens Traitant Du Même SujetBoucennaPas encore d'évaluation
- Sol Série 1Document5 pagesSol Série 11ere année ingPas encore d'évaluation
- Le Protocole STPDocument6 pagesLe Protocole STPYas Sine100% (1)
- Le Sens de L'ouïeDocument145 pagesLe Sens de L'ouïeyeno100% (2)
- Automatique Des Systemes Lineaires (1GE & 1GIL) TD #5Document1 pageAutomatique Des Systemes Lineaires (1GE & 1GIL) TD #5Houssein OussyadPas encore d'évaluation
- Chapitre 3 SC.Document20 pagesChapitre 3 SC.Ayman LamzouriPas encore d'évaluation
- Les Talismans Et Sceaux MagiquesDocument4 pagesLes Talismans Et Sceaux MagiquesEric BovePas encore d'évaluation
- Etrange Week-End de Janet DaileyDocument151 pagesEtrange Week-End de Janet DaileyPélagiePas encore d'évaluation
- À La Conquête de Mon EnnemieDocument221 pagesÀ La Conquête de Mon EnnemieLiana HorbPas encore d'évaluation
- Cristtallisation FiniDocument18 pagesCristtallisation FiniDoha HaggouchiPas encore d'évaluation
- Chapitre 2Document9 pagesChapitre 2zgsqgqPas encore d'évaluation
- Conductivite ThermiqueDocument6 pagesConductivite ThermiqueMohamed El-amine BendjoudaPas encore d'évaluation
- Être en Christ Par La ConsécrationDocument8 pagesÊtre en Christ Par La ConsécrationDavid Josué Ndongo NyamaPas encore d'évaluation
- Projet Pro MethanisationDocument32 pagesProjet Pro Methanisationimane benssalihPas encore d'évaluation
- Article413307 PDFDocument10 pagesArticle413307 PDFNouredine BoujnahPas encore d'évaluation
- Kozanitis (2015), La Relation PédagogiqueDocument6 pagesKozanitis (2015), La Relation PédagogiquebenjapeyrePas encore d'évaluation
- Liste Des Equipements Agrees Au 08-11-2023Document2 475 pagesListe Des Equipements Agrees Au 08-11-2023Zak BoukhrissPas encore d'évaluation
- Chapitre 1 - Hygiene-Et-Technologie-Du-LaitDocument34 pagesChapitre 1 - Hygiene-Et-Technologie-Du-Laitsihatasnim9Pas encore d'évaluation
- Projets Fin D'études - MP2014Document8 pagesProjets Fin D'études - MP2014Tarak BenslimanePas encore d'évaluation