Vous aimerez peut-être aussi
- Unité de Remplissage de BouteillesDocument4 pagesUnité de Remplissage de BouteillesMed Aymen Bensalem0% (1)
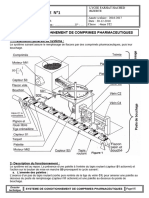
- Systeme de Conditionnement de Comprimes PharmaceutiquesDocument7 pagesSysteme de Conditionnement de Comprimes Pharmaceutiquessaber mecheri100% (3)
- Devoir de Contrôle N°1 Lycée Pilote - Technologie Remplissage Des Bouteilles de Gaz - 1ère AS (2014-2015) MR Mohamed HamzaDocument4 pagesDevoir de Contrôle N°1 Lycée Pilote - Technologie Remplissage Des Bouteilles de Gaz - 1ère AS (2014-2015) MR Mohamed Hamzaahmed tounsiPas encore d'évaluation
- ds1 Sta 2019Document4 pagesds1 Sta 2019Ines BaazizPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI RaoufDocument8 pagesDevoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI Raoufimed100% (4)
- 8c5lh-Unite Automatique de PDFDocument3 pages8c5lh-Unite Automatique de PDFl mPas encore d'évaluation
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguer100% (1)
- S A D T D C: Ysteme Utomatique E RI E AissesDocument6 pagesS A D T D C: Ysteme Utomatique E RI E Aisseslou louPas encore d'évaluation
- - - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725Document18 pages- - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725khadija achtouiPas encore d'évaluation
- Devoir 3 Modele 3 Si 2 Bac SM B Semestre 2Document14 pagesDevoir 3 Modele 3 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- Devoir de Synthese N°3: Disciplines TechniquesDocument4 pagesDevoir de Synthese N°3: Disciplines TechniquesJUSDOVIC EDJOZOMBIPas encore d'évaluation
- DT Copie1 4eme NRDocument6 pagesDT Copie1 4eme NRChokri Jaballi100% (1)
- Série 14 4ST NR 2024 GRAFCETDocument4 pagesSérie 14 4ST NR 2024 GRAFCETAbdelbasset Zaiech100% (1)
- ds1 SC 2020 2021Document8 pagesds1 SC 2020 2021Ahmed NajjarPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFIDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFIChihab GhlalaPas encore d'évaluation
- DT DC2 3ST 23 24Document3 pagesDT DC2 3ST 23 24Badreddine KraiemPas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Zouhaier Rihane) (Lycee Sidi Zekri)Document4 pagesDevoir de Synthèse N°1 2012 2013 (Zouhaier Rihane) (Lycee Sidi Zekri)abdelmoutalib salimPas encore d'évaluation
- (2019-2020) - DSN°1 - 2ème-Poste de Découpage de Marbre BarraDocument3 pages(2019-2020) - DSN°1 - 2ème-Poste de Découpage de Marbre BarraAdam Bensaid100% (1)
- Correction Du DEVOIR DE Controle N1-2AS-2019Document4 pagesCorrection Du DEVOIR DE Controle N1-2AS-2019Jalel Khadraoui89% (9)
- Dossier Technique DS 2eme SC N 1Document1 pageDossier Technique DS 2eme SC N 1Youssef AouadiPas encore d'évaluation
- Dev1 Shema TF3 S1 26102023Document3 pagesDev1 Shema TF3 S1 26102023Daouda OUEDRAOGOPas encore d'évaluation
- Unité de Remplissage Des Bouteilles en Huile D'olive: Drep XXDocument20 pagesUnité de Remplissage Des Bouteilles en Huile D'olive: Drep XXAhmed ChebchoubPas encore d'évaluation
- DC2 2 SC2Document3 pagesDC2 2 SC2Adel KmimechPas encore d'évaluation
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (2)
- DS1-DT-Carreaux CeramiquesDocument4 pagesDS1-DT-Carreaux CeramiquesMouad MemniPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 1ère AS (2014-2015) MR BAAZAOUI RaoufDocument6 pagesDevoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 1ère AS (2014-2015) MR BAAZAOUI Raouflabzaeb95Pas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFIDocument4 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS Toutes Sections (2012-2013) MR Abdallah RAOUAFISsantrino OnirtnassPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimPas encore d'évaluation
- Graf Cet Exercice SDocument15 pagesGraf Cet Exercice Sdarknight0% (1)
- Grafcet ExercicesDocument15 pagesGrafcet Exercicesياسين بوعيشي57% (7)
- TD Grafcet Série3 PDFDocument15 pagesTD Grafcet Série3 PDFSeekn Dstroy100% (1)
- Tte 03 Ce 1Document4 pagesTte 03 Ce 1Djerbien Slouma100% (1)
- Devoir de CONTROLE N° 1 2021Document4 pagesDevoir de CONTROLE N° 1 2021Sabrinelle AbbessiPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - Conditionnement de Parfum - 3ème Technique (2016-2017) MR MezniŚą ŅăPas encore d'évaluation
- DT DS1Document4 pagesDT DS1Nejib JallouliPas encore d'évaluation
- DC2-2 Info - 2021Document3 pagesDC2-2 Info - 2021Besbes ZiedPas encore d'évaluation
- Poste Automatique de Cisaillage de BarresDocument10 pagesPoste Automatique de Cisaillage de Barresوسيم زعفوريPas encore d'évaluation
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- DC3 4ScT (09-10)Document9 pagesDC3 4ScT (09-10)Wagih MrassiPas encore d'évaluation
- FTVX 23004 NDN G1 OtDocument2 pagesFTVX 23004 NDN G1 OtShane LendoyePas encore d'évaluation
- Devoir de Synthèse N1-2ati-2012Document6 pagesDevoir de Synthèse N1-2ati-2012Rafik KhazriPas encore d'évaluation
- DS1 2019-DTDocument5 pagesDS1 2019-DTMouad MemniPas encore d'évaluation
- Exo Choix Detecteur EleveDocument3 pagesExo Choix Detecteur EleveBabacarDiagoPas encore d'évaluation
- CHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Document8 pagesCHAP VI Leçon 1 TR Pignon Crémaillère Vis Ecrou.Jaouher BakloutiPas encore d'évaluation
- Encaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeDocument4 pagesEncaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeTaieb BentaherPas encore d'évaluation
- 8fa3z-Unite Automatique de Remplissage de Bouteille de Gaz PDFDocument2 pages8fa3z-Unite Automatique de Remplissage de Bouteille de Gaz PDFThe geek Cuesta100% (3)
- Devoir de Contrôle N°2 2009 2010 (Ghanmi Nasr)Document7 pagesDevoir de Contrôle N°2 2009 2010 (Ghanmi Nasr)Khaled AmriPas encore d'évaluation
- Examen Uc68hc11-2020-2021 - CMI - EME - VFDocument2 pagesExamen Uc68hc11-2020-2021 - CMI - EME - VFIkram El JamaiPas encore d'évaluation
- Série Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahDocument6 pagesSérie Dexercices N°3 - Génie Électrique - GRAFCET Synchronisés - Bac Technique (2015-2016) MR Raouafi AbdallahOumar BAPas encore d'évaluation
- Corrige BTS-MI Automatique 2008Document7 pagesCorrige BTS-MI Automatique 2008mahadPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poinçonneuse Automatique de Jetons - 1ère AS (2014-2015) MR BAAZAOUI RaoufDocument3 pagesDevoir de Contrôle N°1 - Technologie Poinçonneuse Automatique de Jetons - 1ère AS (2014-2015) MR BAAZAOUI RaoufØűmãïmą MizouriPas encore d'évaluation
- TD N2 AutomatismeDocument4 pagesTD N2 AutomatismeYouness Bakache80% (5)
- Evaluation Schéma BAC F3Document3 pagesEvaluation Schéma BAC F3Daouda OUEDRAOGOPas encore d'évaluation
- DC2 4ST 2008Document6 pagesDC2 4ST 2008Chine MakPas encore d'évaluation
- DT DC3 FinaleDocument6 pagesDT DC3 FinaleChaabane BOUALIPas encore d'évaluation
- 3 Personnaliser FCDocument3 pages3 Personnaliser FCOtman OtoPas encore d'évaluation
- 2-Initiation À FCDocument6 pages2-Initiation À FCOtman OtoPas encore d'évaluation
- 20PPMDocument3 pages20PPMOtman OtoPas encore d'évaluation
- Approche Hybride Pour La Resolution Des Equations de Beltrami-Michell Dans Des Milieux MulticonvexesDocument80 pagesApproche Hybride Pour La Resolution Des Equations de Beltrami-Michell Dans Des Milieux MulticonvexesOtman OtoPas encore d'évaluation
- Ds TCTDocument5 pagesDs TCTOtman OtoPas encore d'évaluation
- Thermo Exercices Ch0 Rap MathematiqueDocument8 pagesThermo Exercices Ch0 Rap MathematiqueOtman OtoPas encore d'évaluation
- DL TCTDocument6 pagesDL TCTOtman OtoPas encore d'évaluation
- TD3-tour de La TerreurDocument2 pagesTD3-tour de La TerreurOtman OtoPas encore d'évaluation
- RDM 1BCO Chap2 Eco 2012-2013 PDFDocument29 pagesRDM 1BCO Chap2 Eco 2012-2013 PDFOtman Oto100% (1)
- Devoircorrigdesynthsen3 Gniemcaniquesystmedegrnaillageetdecontrledebrut Bactechnique2012 2013mrbenab 150523230907 Lva1 App6892Document14 pagesDevoircorrigdesynthsen3 Gniemcaniquesystmedegrnaillageetdecontrledebrut Bactechnique2012 2013mrbenab 150523230907 Lva1 App6892Otman OtoPas encore d'évaluation
- Embrayage Frein Et ReducteurDocument7 pagesEmbrayage Frein Et ReducteurOtman OtoPas encore d'évaluation
- F6 Les Param Coupe PDFDocument3 pagesF6 Les Param Coupe PDFOtman OtoPas encore d'évaluation
- Dessin CDocument7 pagesDessin COtman OtoPas encore d'évaluation
- Enrouleurderessortcorrig 150227132516 Conversion Gate02Document5 pagesEnrouleurderessortcorrig 150227132516 Conversion Gate02Otman OtoPas encore d'évaluation
- Ds 2 15-16Document4 pagesDs 2 15-16Otman Oto100% (1)
- Roulement BCDocument6 pagesRoulement BCOtman OtoPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFDocument2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFOtman OtoPas encore d'évaluation
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Document2 pagesCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Otman OtoPas encore d'évaluation
- Transversalecoursfichesynthsevf 150629112327 Lva1 App6892Document34 pagesTransversalecoursfichesynthsevf 150629112327 Lva1 App6892Otman OtoPas encore d'évaluation