Vous aimerez peut-être aussi
- Correction Travaux Diriges PDFDocument20 pagesCorrection Travaux Diriges PDFtamsirniang100% (1)
- CNC Psi 2009 Physique 1 Epreuve PDFDocument12 pagesCNC Psi 2009 Physique 1 Epreuve PDFMohachmiPas encore d'évaluation
- PC PHYSIQUE CENTRALE 1 2002.extraitDocument4 pagesPC PHYSIQUE CENTRALE 1 2002.extraitNadaPas encore d'évaluation
- Licence ELT-2017-TD Régulation-BF-finalDocument30 pagesLicence ELT-2017-TD Régulation-BF-finalamine milanoPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- 2013 Ham6335Document93 pages2013 Ham6335ato ndongo fabrice100% (1)
- DéterminantsDocument33 pagesDéterminantsEugene DupasPas encore d'évaluation
- Torrichi MPM PDFDocument106 pagesTorrichi MPM PDFOumarou KontaPas encore d'évaluation
- Régulation Et AsservissementDocument4 pagesRégulation Et Asservissementmohamed momoPas encore d'évaluation
- Problemes Corriges Physique Poses Concours Centrale Supelec TomeDocument1 pageProblemes Corriges Physique Poses Concours Centrale Supelec TomeHarakat ElhoucinePas encore d'évaluation
- Latex PCDocument11 pagesLatex PCAffaki MohammedPas encore d'évaluation
- Examen Final Auto Iaa3Document5 pagesExamen Final Auto Iaa3Simon KoutouaPas encore d'évaluation
- TD s5 Quantique PDFDocument56 pagesTD s5 Quantique PDFSafaa El achhab0% (1)
- CSP ScriptPiezoelectricsDocument10 pagesCSP ScriptPiezoelectricsmeryem abidaPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Transmission EISTI Guy-Almouzni PDFDocument209 pagesTransmission EISTI Guy-Almouzni PDFDocPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- These 16 NovDocument149 pagesThese 16 Novkarima naderPas encore d'évaluation
- TP2 Mode D'emploi de LatisPro PDFDocument4 pagesTP2 Mode D'emploi de LatisPro PDFEricPas encore d'évaluation
- 02 Elec-Num Td-CorrigeDocument2 pages02 Elec-Num Td-CorrigeHouda GuedriPas encore d'évaluation
- Cinématique Des Solides Indéformables: IPEIB 2020Document56 pagesCinématique Des Solides Indéformables: IPEIB 2020Aymen Gharbi100% (1)
- 220 2 Intelligence Artificielle Partie 2Document24 pages220 2 Intelligence Artificielle Partie 2RDPas encore d'évaluation
- Chapitre 2 Avec Exercices-Systèmes Non-LinéairesDocument13 pagesChapitre 2 Avec Exercices-Systèmes Non-LinéairesmohamedPas encore d'évaluation
- AnedpDocument216 pagesAnedpKamal Rachid100% (1)
- Fiches TD Phys. IIDocument51 pagesFiches TD Phys. IIbendrissaya349Pas encore d'évaluation
- TP N° 04 EléctricitéDocument9 pagesTP N° 04 EléctricitéElectronic GamesPas encore d'évaluation
- Maghat Cours SVT Thermo Equilibre PDFDocument28 pagesMaghat Cours SVT Thermo Equilibre PDFfaslaPas encore d'évaluation
- Fascicule TP Techniques de MesureDocument18 pagesFascicule TP Techniques de MesureAbir HezziPas encore d'évaluation
- Leçon1 Asservissement L2GMDocument10 pagesLeçon1 Asservissement L2GMala16khadraoui100% (1)
- Centrale TSI 2018 PhysiChim2 Corrige Ericb Mai2020Document16 pagesCentrale TSI 2018 PhysiChim2 Corrige Ericb Mai2020best.x gamerPas encore d'évaluation
- Sujet Corrige EF Maths2 ST 18-19Document5 pagesSujet Corrige EF Maths2 ST 18-19Chikhaoui AbdellahPas encore d'évaluation
- TD NumériqueDocument6 pagesTD Numériqueabdeslam100% (1)
- (Cin) (TD) Manege Pieuvre-2Document2 pages(Cin) (TD) Manege Pieuvre-2Omaima BelgacemPas encore d'évaluation
- Systeme EmbarquéeDocument62 pagesSysteme Embarquéekhaledbenamor100% (1)
- Développement Du Modèle D'ising À Haute Température CorrigéDocument3 pagesDéveloppement Du Modèle D'ising À Haute Température Corrigékhaled safiPas encore d'évaluation
- HENDAOUI - MOUNIRA - Sup - Cours - Logique CsDocument55 pagesHENDAOUI - MOUNIRA - Sup - Cours - Logique CsBackPas encore d'évaluation
- Table Des Matières. Déplacement Des Équilibres Chimiques. S.Boukaddid Déplacement Des Équilibres Chimiques Spé MPDocument19 pagesTable Des Matières. Déplacement Des Équilibres Chimiques. S.Boukaddid Déplacement Des Équilibres Chimiques Spé MPhichamPas encore d'évaluation
- Parametrage Des Systemes MecaniquesDocument13 pagesParametrage Des Systemes MecaniquesAdam MoallaPas encore d'évaluation
- TD29 Filtrage Passe-Bas, Isolation Composante Continue-CorrigeDocument3 pagesTD29 Filtrage Passe-Bas, Isolation Composante Continue-CorrigeLahcen ElamraouiPas encore d'évaluation
- Notes de CoursDocument47 pagesNotes de Coursredoudour redouanePas encore d'évaluation
- CH5 CinetiqueDocument17 pagesCH5 CinetiqueMétuschélah Lagouth100% (2)
- TD ReducteursDocument6 pagesTD ReducteursOumaima Ghziale100% (1)
- Lisi 2Document23 pagesLisi 2Mounira TarhouniPas encore d'évaluation
- Chapitre 3 1920-V1Document32 pagesChapitre 3 1920-V1Julien baptistePas encore d'évaluation
- Réf Cpge TsiDocument17 pagesRéf Cpge TsidouniaPas encore d'évaluation
- TD 04 PDFDocument1 pageTD 04 PDFsarsauraPas encore d'évaluation
- Approximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsDocument70 pagesApproximation Du Modèle Géométrique Inverse D'un Robot Manipulateur Par Les Réseaux de Neurones ArtificielsMohamed LahninePas encore d'évaluation
- Exercices Les Spectres D Emission Avec CorrigeDocument2 pagesExercices Les Spectres D Emission Avec CorrigePaul Pascon Classes0% (1)
- Chapitre Ii: Les Montres MecaniquesDocument4 pagesChapitre Ii: Les Montres Mecaniqueshello youPas encore d'évaluation
- TD L3fip 2012Document89 pagesTD L3fip 2012azzamPas encore d'évaluation
- 5 3 OperateurDocument37 pages5 3 OperateurSouhail Mssassi100% (1)
- TD - Electromagnetisme 81 128Document48 pagesTD - Electromagnetisme 81 128KabaPas encore d'évaluation
- 02 Polynomes de LegendreDocument18 pages02 Polynomes de Legendreghouti ghoutiPas encore d'évaluation
- Chapitre 2e PDFDocument16 pagesChapitre 2e PDFhamzaPas encore d'évaluation
- Exercice: Les Nombres AmisDocument12 pagesExercice: Les Nombres AmisMIMOUNIPas encore d'évaluation
- l5 FlybackforwardDocument7 pagesl5 FlybackforwardYassine EdahbiPas encore d'évaluation
- Présentation de Soutenance de Thèse Sur Le Contrôle Des Système FractionnairesDocument78 pagesPrésentation de Soutenance de Thèse Sur Le Contrôle Des Système FractionnaireszazarPas encore d'évaluation
- Cours D'electromagnetisme 2Document48 pagesCours D'electromagnetisme 2pacifique ngantaPas encore d'évaluation
- PRBLM Intégration MPDocument9 pagesPRBLM Intégration MPSalma Za100% (1)
- Cours Autom 08Document28 pagesCours Autom 08OsmoPas encore d'évaluation
- Bascules Et Logique Séquentielle.4 PDFDocument30 pagesBascules Et Logique Séquentielle.4 PDFMaison MeublePas encore d'évaluation
- TP 2Document4 pagesTP 2anon_151712057Pas encore d'évaluation
- Bascules Et Logique Séquentielle.4 PDFDocument30 pagesBascules Et Logique Séquentielle.4 PDFMaison MeublePas encore d'évaluation
- Série IDocument2 pagesSérie Ianon_151712057Pas encore d'évaluation
- DiodeDocument19 pagesDiodeanon_151712057Pas encore d'évaluation
- Série IDocument2 pagesSérie Ianon_151712057Pas encore d'évaluation
- Rapport P6 2013 03 PDFDocument24 pagesRapport P6 2013 03 PDFCharaf LeoPas encore d'évaluation
- Transistor PDFDocument7 pagesTransistor PDFSergio CázaresPas encore d'évaluation
- Ao PDFDocument21 pagesAo PDFanon_151712057Pas encore d'évaluation
- Cours ElectrotechniqueDocument156 pagesCours Electrotechniquedjo10Pas encore d'évaluation
- Gestion D'entreprisesDocument19 pagesGestion D'entreprisesanon_151712057Pas encore d'évaluation
- Bermuda TriangleDocument3 pagesBermuda Triangleanon_151712057Pas encore d'évaluation
- Rapport P6 2013 03 PDFDocument24 pagesRapport P6 2013 03 PDFCharaf LeoPas encore d'évaluation
- AsservissementsDocument14 pagesAsservissementsanon_151712057Pas encore d'évaluation
- Applications Diffraction PDFDocument9 pagesApplications Diffraction PDFanon_151712057Pas encore d'évaluation
- BilansDocument19 pagesBilansanon_151712057Pas encore d'évaluation
- Bermuda TriangleDocument3 pagesBermuda Triangleanon_151712057Pas encore d'évaluation
- Ao PDFDocument21 pagesAo PDFanon_151712057Pas encore d'évaluation
- Bermuda TriangleDocument3 pagesBermuda Triangleanon_151712057Pas encore d'évaluation
- BilansDocument19 pagesBilansanon_151712057Pas encore d'évaluation
- DissertationDocument2 pagesDissertationanon_151712057Pas encore d'évaluation
- Applications Diffraction PDFDocument9 pagesApplications Diffraction PDFanon_151712057Pas encore d'évaluation
- Energie MarethermiqueDocument1 pageEnergie Marethermiqueanon_151712057Pas encore d'évaluation
- Energie MarethermiqueDocument1 pageEnergie Marethermiqueanon_151712057Pas encore d'évaluation
- DissertationDocument2 pagesDissertationanon_151712057Pas encore d'évaluation
- DissertationDocument2 pagesDissertationanon_151712057Pas encore d'évaluation
- Energie MarethermiqueDocument1 pageEnergie Marethermiqueanon_151712057Pas encore d'évaluation
- MecDuPointMat Polycop Ex PDFDocument67 pagesMecDuPointMat Polycop Ex PDFNorcheneBelhassenPas encore d'évaluation
- Projet Fin D'étudesDocument62 pagesProjet Fin D'étudesmustapha oukssouPas encore d'évaluation
- Documentation Pack Bi-Temperature 891706Document8 pagesDocumentation Pack Bi-Temperature 891706JulienGhuisolandPas encore d'évaluation
- 30752Document29 pages30752Louis PunguPas encore d'évaluation
- M Systemes Asservis Numeriques TD3Document66 pagesM Systemes Asservis Numeriques TD3MENANI ZineddinePas encore d'évaluation
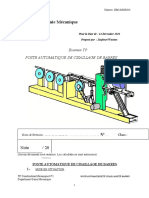
- Poste Automatique de Cisaillage de BarresDocument10 pagesPoste Automatique de Cisaillage de Barresوسيم زعفوريPas encore d'évaluation
- Commande Des Systèmes Linéaires V0.3 Djamel OUNNASDocument98 pagesCommande Des Systèmes Linéaires V0.3 Djamel OUNNASkeskes nourPas encore d'évaluation
- Cours D - Automatique MECA2 Ch1Document26 pagesCours D - Automatique MECA2 Ch1nesrine dhaouadi100% (1)
- Identif 4Document32 pagesIdentif 4Amina BELABIDPas encore d'évaluation
- TP N°3 É ' M - S: Tude de Systemes en Utilisant L Outil Atlab ImulinkDocument3 pagesTP N°3 É ' M - S: Tude de Systemes en Utilisant L Outil Atlab ImulinkAmina ChelloumPas encore d'évaluation
- P2 Dã©senfumageDocument14 pagesP2 Dã©senfumageWassim DjennanePas encore d'évaluation
- Initiation À MATLAB: 1. Généralités 1.1. Accès À MatlabDocument14 pagesInitiation À MATLAB: 1. Généralités 1.1. Accès À MatlabIguejdi LahcenPas encore d'évaluation
- Majister.2005 KH - Imarazene90 PDFDocument111 pagesMajister.2005 KH - Imarazene90 PDFAsm MaPas encore d'évaluation
- Radionavigation Ed11 Lpbugeat - OriginalDocument10 pagesRadionavigation Ed11 Lpbugeat - OriginalNaguibPas encore d'évaluation
- TP2 PidDocument7 pagesTP2 Pidسليم ودادي100% (1)
- Essai RapportDocument18 pagesEssai RapportMohamed BerzoukPas encore d'évaluation
- Asservissement Et Regulation PDFDocument15 pagesAsservissement Et Regulation PDFphyPas encore d'évaluation
- S 7260 - Simulation Et CAO en Automatique Et MécatroniqueDocument15 pagesS 7260 - Simulation Et CAO en Automatique Et MécatroniqueAxelPas encore d'évaluation
- Cours SAMP 7 Discretisation CorrecteurDocument5 pagesCours SAMP 7 Discretisation CorrecteurAbdelhadi AZPas encore d'évaluation
- Transf Laplace FN TransfertDocument33 pagesTransf Laplace FN TransfertAicha B'mhPas encore d'évaluation
- CR 1Document36 pagesCR 1Hajar TouilPas encore d'évaluation
- Polycopie - Sebbagh - Commande Avancée PDFDocument48 pagesPolycopie - Sebbagh - Commande Avancée PDFamine juventusPas encore d'évaluation
- Cours Automatique Part #01Document23 pagesCours Automatique Part #01Jeremie Ivann NGOYEPas encore d'évaluation
- Rc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Document29 pagesRc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Idoumou AbdemouPas encore d'évaluation
- Equipement de Lhabitât Promotion 2019 PDFDocument8 pagesEquipement de Lhabitât Promotion 2019 PDFZaidi FodilPas encore d'évaluation
- Cours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Document30 pagesCours - Instrumenation Industrielle - L3 - Gi - S2 - 2020Thê ĒxęptïonPas encore d'évaluation
- Ghita Edani 3Document1 pageGhita Edani 3Ghita Eddani100% (1)
- 1 Systemes Asservis Lpaii2021Document11 pages1 Systemes Asservis Lpaii2021Boukari Abdoulaye IdrissaPas encore d'évaluation
- VFR Area Chart-1Document1 pageVFR Area Chart-1Paulo AguiarPas encore d'évaluation
- Autotriax2 Software DB 23.09.14 FRDocument4 pagesAutotriax2 Software DB 23.09.14 FRzossie davidPas encore d'évaluation