Vous aimerez peut-être aussi
- Scie Sauteuse (Application)Document5 pagesScie Sauteuse (Application)MIMFS100% (18)
- Étude Et Automatisation D'une Étiqueteuse Sacmi Au Sein de L'unité Conditionnement D'huile À Cevital de Bejaia PDFDocument88 pagesÉtude Et Automatisation D'une Étiqueteuse Sacmi Au Sein de L'unité Conditionnement D'huile À Cevital de Bejaia PDFIbtihel Mechleoui67% (9)
- DR Verin HydrauliqueDocument13 pagesDR Verin HydrauliquefatihamPas encore d'évaluation
- RTA Audi A3 Diesel AutovoltDocument25 pagesRTA Audi A3 Diesel Autovoltjulia100% (1)
- 02 Poupee MobileDocument6 pages02 Poupee Mobilemasteratsii100% (1)
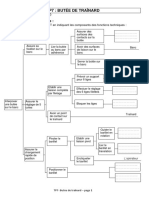
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedPas encore d'évaluation
- DPM21 22Document4 pagesDPM21 22jetlaoui frajPas encore d'évaluation
- DPmecaniqueDocument4 pagesDPmecaniquelou louPas encore d'évaluation
- Leçon 06: Lecture D'un Dessin D'ensembleDocument9 pagesLeçon 06: Lecture D'un Dessin D'ensembleAkram SahliPas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- DR 2023Document4 pagesDR 2023hamrouniPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiDocument7 pagesDevoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiGhost GhostPas encore d'évaluation
- Enrouleurderessortcorrig 150227132516 Conversion Gate02Document5 pagesEnrouleurderessortcorrig 150227132516 Conversion Gate02Otman OtoPas encore d'évaluation
- Enrouleur de RessortDocument5 pagesEnrouleur de RessortMountaser Bouaoud100% (1)
- 4 SC Tech Ds2 2016 17 DPGM Rayons X 2Document4 pages4 SC Tech Ds2 2016 17 DPGM Rayons X 2DHia Ben AichaPas encore d'évaluation
- Epreuve 2e Seq Mecanique Appliquee TF3Document2 pagesEpreuve 2e Seq Mecanique Appliquee TF3kaka kaladzePas encore d'évaluation
- Exercice Flexion Plane SimpleDocument1 pageExercice Flexion Plane Simpleabdourazg100% (1)
- Mecanisme de Commande D Une Sice A Bois CorrigeDocument4 pagesMecanisme de Commande D Une Sice A Bois CorrigeYasmine Hammami80% (5)
- Transformation de MVT 2024Document9 pagesTransformation de MVT 2024hajhammouda174Pas encore d'évaluation
- 4 Dossier Réponse 0Document6 pages4 Dossier Réponse 0Chokri AtefPas encore d'évaluation
- Usiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Document6 pagesUsiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Najet MarsPas encore d'évaluation
- 1DS1Document15 pages1DS1ilyass mhalPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow100% (1)
- Lycée Habib Thameur: Ecrou SerréDocument6 pagesLycée Habib Thameur: Ecrou SerréAbdelmajid ZouaghiPas encore d'évaluation
- DPMxDocument5 pagesDPMxezzinePas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDocument6 pagesDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecPas encore d'évaluation
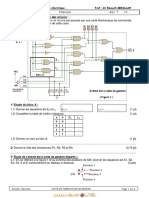
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2012-2013) MR Abdallah RAOUAFI 2 PDFMayouMohAmed100% (1)
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiPas encore d'évaluation
- Cours Engrenages eDocument5 pagesCours Engrenages eMatthew BardeauxPas encore d'évaluation
- Chap Ii Boite de Vitesses Manuelle EtudiantDocument6 pagesChap Ii Boite de Vitesses Manuelle EtudiantLedoux Ngaba100% (1)
- 01 Tour ParalleleDocument7 pages01 Tour ParallelekhocinePas encore d'évaluation
- STM1-ELEVE-guidage en RotationDocument11 pagesSTM1-ELEVE-guidage en RotationFatimaZahra QOBBIPas encore d'évaluation
- 0 CT 2021-22 Session 1Document4 pages0 CT 2021-22 Session 1angesoukaina216Pas encore d'évaluation
- EMBRAYAGE - FREINS - App PDFDocument4 pagesEMBRAYAGE - FREINS - App PDFHanane Tounsi88% (8)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRI - Unlocked BackupDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRI - Unlocked BackupRasmi BaananouPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIDocument4 pagesDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2011-2012) MR BEMRIAhmed OssamaPas encore d'évaluation
- DR2 2020 Mechanical R2018Document11 pagesDR2 2020 Mechanical R2018Fethi BenmassoudePas encore d'évaluation
- Cours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorDocument10 pagesCours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorHana KhemissiPas encore d'évaluation
- Cours Initiation Technique 8eme Amel SallemiDocument6 pagesCours Initiation Technique 8eme Amel SallemiAHLEM RMida100% (1)
- 6eme - S4 - 1 - ActivitéDocument2 pages6eme - S4 - 1 - Activitéyasser.elbadaouyPas encore d'évaluation
- Sujet 21 - LogoDocument8 pagesSujet 21 - Logohousinmechani1Pas encore d'évaluation
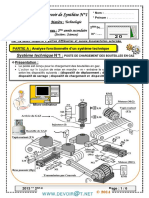
- Dossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesDossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesomatrPas encore d'évaluation
- TP Etau À Ventouse ÉlèveDocument5 pagesTP Etau À Ventouse ÉlèvemidounPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2013-2014) MR Abdallah RAOUAFIDocument6 pagesDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2013-2014) MR Abdallah RAOUAFIRiDhA HeZlOuNPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Station de Lavage Des Voitures - Bac Technique (2012-2013) MR HENI ABDELLATIF 2Document4 pagesDevoir de Synthèse N°1 - Technologie Station de Lavage Des Voitures - Bac Technique (2012-2013) MR HENI ABDELLATIF 2housinmechani1Pas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Heni Abdellatif)Document8 pagesDevoir de Synthèse N°1 2012 2013 (Heni Abdellatif)Piere EbrahimPas encore d'évaluation
- Devoir de Synthèse N°1 2010 2011 (Zouhaier Rihane) (Lycee Sidi Zekri)Document4 pagesDevoir de Synthèse N°1 2010 2011 (Zouhaier Rihane) (Lycee Sidi Zekri)Khalil MarzoukiPas encore d'évaluation
- T Spé DM 5-11-2020 Version 26-10-2020Document1 pageT Spé DM 5-11-2020 Version 26-10-2020Olivier MontyPas encore d'évaluation
- TP1 Circuit en Mode Impultionnel 2023Document2 pagesTP1 Circuit en Mode Impultionnel 2023houssemouazaa2003Pas encore d'évaluation
- Devoir de Synthese N°1: PrésentationDocument6 pagesDevoir de Synthese N°1: PrésentationSaifeddine BrikiPas encore d'évaluation
- DRM CorrigéDocument6 pagesDRM CorrigéNajet MarsPas encore d'évaluation
- DS1 - DMéc - Cellule Flexible D'usinageDocument3 pagesDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiPas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb FreinkhayachiPas encore d'évaluation
- LectureDocument4 pagesLectureRahma BaccarPas encore d'évaluation
- Ds2-2ème-Pot de Fleurs 2020-2021Document10 pagesDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDocument8 pagesDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Pas encore d'évaluation
- Controle Acc Emb FreinDocument7 pagesControle Acc Emb Freinyassine22Pas encore d'évaluation
- 09 Maquette Boite VitessesDocument7 pages09 Maquette Boite VitessesBrahim Achayfad100% (1)
- Le Ti-pou d'Amérique: Mieux le comprendre pour mieux intervenirD'EverandLe Ti-pou d'Amérique: Mieux le comprendre pour mieux intervenirÉvaluation : 5 sur 5 étoiles5/5 (1)
- Les CoupesDocument3 pagesLes CoupesRahma BaccarPas encore d'évaluation
- Fiche DesignationDocument20 pagesFiche DesignationRahma BaccarPas encore d'évaluation
- Corrigédésignation Des MatériauxDocument10 pagesCorrigédésignation Des MatériauxRahma BaccarPas encore d'évaluation
- Cotation Fonct 4stDocument6 pagesCotation Fonct 4stRahma BaccarPas encore d'évaluation
- Exercices Engrenages eDocument2 pagesExercices Engrenages eRahma BaccarPas encore d'évaluation
- Meule À MainDocument2 pagesMeule À MainHamza 01100% (1)
- LectureDocument4 pagesLectureRahma BaccarPas encore d'évaluation
- Engrenage 4stDocument7 pagesEngrenage 4stRahma BaccarPas encore d'évaluation
- Correction TPDocument2 pagesCorrection TPRahma BaccarPas encore d'évaluation
- Liaison DemontablesDocument55 pagesLiaison DemontablesRahma BaccarPas encore d'évaluation
- CotationDocument17 pagesCotationRahma BaccarPas encore d'évaluation
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleRahma BaccarPas encore d'évaluation
- Fonction Assemblage 4STDocument10 pagesFonction Assemblage 4STRahma Baccar100% (1)
- AnalyseDocument6 pagesAnalyseRahma BaccarPas encore d'évaluation
- CF (Chaine Unilimité)Document2 pagesCF (Chaine Unilimité)Rahma BaccarPas encore d'évaluation
- MH 12214Document4 pagesMH 12214hamza dahbiPas encore d'évaluation
- Boite de Vitesses Robotisee Sensodrive de c3Document5 pagesBoite de Vitesses Robotisee Sensodrive de c3aymendabPas encore d'évaluation
- Tube Cuivre 2Document8 pagesTube Cuivre 2moussaPas encore d'évaluation
- Servo ACDocument22 pagesServo ACHãŸę ŤëmPas encore d'évaluation
- IbrahimDocument13 pagesIbrahimIbrahim SkakriPas encore d'évaluation
- Wacker Dpu 6055 Partes PDFDocument96 pagesWacker Dpu 6055 Partes PDFDawn HallPas encore d'évaluation
- EchographieDocument2 pagesEchographiehf67fxymvnPas encore d'évaluation
- Hypothèses - Sollicitations - Contraintes Extension CompressionDocument2 pagesHypothèses - Sollicitations - Contraintes Extension CompressionHaytam RhaPas encore d'évaluation
- RDM TP Ndeg01 Essai de Traction 1Document18 pagesRDM TP Ndeg01 Essai de Traction 1Amine EL FERHANIPas encore d'évaluation
- Récipients Sous PressionDocument13 pagesRécipients Sous PressionRaouf BelamriPas encore d'évaluation
- 3 Travail Et Énergie CinétiqueDocument9 pages3 Travail Et Énergie CinétiqueJihad ELPas encore d'évaluation
- 448 S - Hydraulique D'équipement Des 631GDocument54 pages448 S - Hydraulique D'équipement Des 631Gait mimounePas encore d'évaluation
- Notice Citroen c4 Notice D Utilisation, 94,1Document172 pagesNotice Citroen c4 Notice D Utilisation, 94,1Simo QzPas encore d'évaluation
- Roues de FrictionDocument8 pagesRoues de FrictionTom JerryPas encore d'évaluation
- Cours Transmission de Mouvements Et1Document17 pagesCours Transmission de Mouvements Et1zouhour brahmiPas encore d'évaluation
- Cours Rhéologie 1 - Définitions Et GénéralitésDocument21 pagesCours Rhéologie 1 - Définitions Et GénéralitésMohamed Kamal67% (3)
- RMChap3 (Traction) ExSup PDFDocument5 pagesRMChap3 (Traction) ExSup PDFToufikJalalEddine100% (1)
- Tarif NoirotDocument36 pagesTarif Noirotnerman dzananovicPas encore d'évaluation
- Exo PlasticiteDocument62 pagesExo PlasticiteDjelloul ReziniPas encore d'évaluation
- FormulesDocument1 pageFormuleshousamPas encore d'évaluation
- Scule SpecializateDocument22 pagesScule SpecializateRadu VasilePas encore d'évaluation
- Chapitre 3 Normes Europeennes de DimensiDocument26 pagesChapitre 3 Normes Europeennes de DimensibasssemPas encore d'évaluation
- MANATEC Wheel Balancer - SISTEMA AUTOMOTRIZDocument4 pagesMANATEC Wheel Balancer - SISTEMA AUTOMOTRIZSistema AutomotrizPas encore d'évaluation
- 2 Actions MécaniquesDocument5 pages2 Actions MécaniqueszinzingenieurPas encore d'évaluation
- Elements de Cours-FraisageDocument8 pagesElements de Cours-FraisageKhoubaib Khelifi50% (2)
- Datasheet Domestica Pular FRA 2023Document2 pagesDatasheet Domestica Pular FRA 2023Cadnel ZOHANPas encore d'évaluation