Vous aimerez peut-être aussi
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Cours - Automate (Mode de Compatibilité)Document6 pagesCours - Automate (Mode de Compatibilité)Mohamed CHERADI100% (1)
- Docsity Examen Sur Le Vehicule Electrique de LoisirDocument18 pagesDocsity Examen Sur Le Vehicule Electrique de LoisirRihem SouayehPas encore d'évaluation
- DERAREDJ RamziDocument24 pagesDERAREDJ Ramziwalid.djermoune.auto2023Pas encore d'évaluation
- Réseaux Locaux Industriels: H JamouliDocument102 pagesRéseaux Locaux Industriels: H Jamouliscar lightPas encore d'évaluation
- Projet Oag-LpDocument7 pagesProjet Oag-LpMohamadou NdiayePas encore d'évaluation
- Cahier de Charges: Applications Arduino, Automobile & CapteursDocument9 pagesCahier de Charges: Applications Arduino, Automobile & CapteursAb HanaePas encore d'évaluation
- x-rtd207 4Document20 pagesx-rtd207 4zaid bousminaPas encore d'évaluation
- Lasse9e TRPDF PDFDocument6 pagesLasse9e TRPDF PDFsdnf jsnvlsvnPas encore d'évaluation
- Elum EnergyDocument26 pagesElum Energyyoussef CHAFAIPas encore d'évaluation
- Nitram-Leader 1000 1500 2000EDocument2 pagesNitram-Leader 1000 1500 2000EzarakighostPas encore d'évaluation
- Catalogue FR Tesys T (t9065ct0701fp r0)Document40 pagesCatalogue FR Tesys T (t9065ct0701fp r0)Reda AdjarPas encore d'évaluation
- Arbi Menzli: Qualifications: Compétences PersonnellesDocument1 pageArbi Menzli: Qualifications: Compétences PersonnellesAzumi ChanPas encore d'évaluation
- PI SoutnanceDocument18 pagesPI SoutnanceahmedPas encore d'évaluation
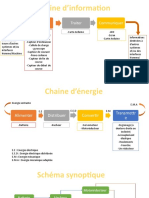
- Chaine D'information: Acquérir Traiter CommuniquerDocument4 pagesChaine D'information: Acquérir Traiter CommuniquerahmedPas encore d'évaluation
- CyberPower NI DS OLS6000-10000E (XL) FR v1Document3 pagesCyberPower NI DS OLS6000-10000E (XL) FR v1koloPas encore d'évaluation
- Contrôle Continu Methodologie de Construction.Document4 pagesContrôle Continu Methodologie de Construction.Loic ReyesPas encore d'évaluation
- Safety RoadDocument22 pagesSafety RoadKhili MouhamedPas encore d'évaluation
- Pi RapportDocument21 pagesPi RapportAmina AlalguiPas encore d'évaluation
- Fiche Mage DSPDocument2 pagesFiche Mage DSPamin ali100% (1)
- Onduleur 650 800 NgaDocument2 pagesOnduleur 650 800 Ngablackmamba etti jeanPas encore d'évaluation
- Modicon m221Document8 pagesModicon m221cyrillekamgaPas encore d'évaluation
- 3 FreinomètresDocument13 pages3 FreinomètresTecnicas Reunidas de Automoción100% (1)
- Quick Start Guide - FTDDocument4 pagesQuick Start Guide - FTDZEBOUAPas encore d'évaluation
- 14 - Ieee 1394Document4 pages14 - Ieee 1394api-19731153Pas encore d'évaluation
- Cours Bus de Terrain ASIDocument9 pagesCours Bus de Terrain ASIRidhaPas encore d'évaluation
- Ch1: Introduction Aux Systemes EmbarquesDocument10 pagesCh1: Introduction Aux Systemes Embarquesimeness100% (1)
- SmartDongle 4GDocument1 pageSmartDongle 4GNouhouyi Ali GouniPas encore d'évaluation
- Réalisation D'un Banc D'essai de La Chaine D'action 'Variateur de Vitesse - Moteur Asynchrone ' Commandé Par Un API Et Su - 1Document113 pagesRéalisation D'un Banc D'essai de La Chaine D'action 'Variateur de Vitesse - Moteur Asynchrone ' Commandé Par Un API Et Su - 1David AssoyiPas encore d'évaluation
- Cours Automate Programmable IndustrielDocument11 pagesCours Automate Programmable Industrielkwedjeu ronaldPas encore d'évaluation
- Réalisation D'un Banc D'essai de LaDocument131 pagesRéalisation D'un Banc D'essai de Lam.boudraaPas encore d'évaluation
- Cyberpower Ni Ds Elite Pro1000-3000elcdrt2u FR v1Document3 pagesCyberpower Ni Ds Elite Pro1000-3000elcdrt2u FR v1Mehdi WalkerPas encore d'évaluation
- II Meca 2 S2Document64 pagesII Meca 2 S2Sa SukePas encore d'évaluation
- Dampers SubmittalsDocument2 pagesDampers Submittalsluis lealPas encore d'évaluation
- Oussaman AZENNOUDDocument96 pagesOussaman AZENNOUDMouad ImzouraPas encore d'évaluation
- CV Zaid 2022Document2 pagesCV Zaid 2022Zizo ZaidPas encore d'évaluation
- Chap 1 Struc Sys CorrDocument13 pagesChap 1 Struc Sys CorrranimkhemirePas encore d'évaluation
- Ci CMF160 310-FR FDocument16 pagesCi CMF160 310-FR FmarybaalouachPas encore d'évaluation
- Cours APIs ESA2Document17 pagesCours APIs ESA2Nek Moussa100% (1)
- Fiche Produit InteliNano MRS AMF PLUSDocument6 pagesFiche Produit InteliNano MRS AMF PLUSChafin ADJALPas encore d'évaluation
- Reseaux de TerrainDocument9 pagesReseaux de TerrainSerge RINAUDOPas encore d'évaluation
- Équipement D'intercoDocument1 pageÉquipement D'intercolionnardmarielaurencePas encore d'évaluation
- Prestations SI Pour Les Centres SEI - Synthèse Des CCTP Lots 1 2 Et 3Document23 pagesPrestations SI Pour Les Centres SEI - Synthèse Des CCTP Lots 1 2 Et 3gep.signesPas encore d'évaluation
- Module 3 - 1 - Gestion Avancée Du Spectre Pour Les Télécommunications MobilesDocument89 pagesModule 3 - 1 - Gestion Avancée Du Spectre Pour Les Télécommunications MobilesKalilou TraPas encore d'évaluation
- Memoire ENSP - OTTOU - Corrige1Document101 pagesMemoire ENSP - OTTOU - Corrige1abed100% (2)
- Cours de Cgao 3 Eme AnneeDocument10 pagesCours de Cgao 3 Eme AnneeSali Madi100% (1)
- Cab LageDocument4 pagesCab LageSuma YàPas encore d'évaluation
- AutomatesDocument36 pagesAutomatesomariosoft100% (3)
- 2 - Plaques de RipageDocument3 pages2 - Plaques de RipageTecnicas Reunidas de AutomociónPas encore d'évaluation
- Memoire Master 2IE Idrissa DIOP M2GEER-Vers-corrigéeDocument107 pagesMemoire Master 2IE Idrissa DIOP M2GEER-Vers-corrigéeHans lionel ABAGHA ELLAPas encore d'évaluation
- Universite Hassiba Benbouali de Chlef Faculté de TechnologieDocument64 pagesUniversite Hassiba Benbouali de Chlef Faculté de TechnologieMohamed Yacine DjarirPas encore d'évaluation
- Modèle Powerlogic Ion7550 / Ion7650 Tran: Option ProduitDocument4 pagesModèle Powerlogic Ion7550 / Ion7650 Tran: Option Produitmido2112Pas encore d'évaluation
- COMMUTATIONDocument86 pagesCOMMUTATIONFouzia AddalPas encore d'évaluation
- Qos GPRSDocument82 pagesQos GPRSMichael MefenzaPas encore d'évaluation
- Copie de Version Finale Mémoire SALIHOU SAÏDOU PDFDocument94 pagesCopie de Version Finale Mémoire SALIHOU SAÏDOU PDFmohamadouPas encore d'évaluation
- CyberPower NI DS ELITE+PRO1000-3000ELCDRTXL2U FR v1Document3 pagesCyberPower NI DS ELITE+PRO1000-3000ELCDRTXL2U FR v1Hal ImaPas encore d'évaluation
- Sécurité Des Reseaux Et Systèmes D'information P1 - CopieDocument109 pagesSécurité Des Reseaux Et Systèmes D'information P1 - CopieMignaneB-BassePas encore d'évaluation
- Les Boissons GazeuseDocument12 pagesLes Boissons GazeuseRajaa KsPas encore d'évaluation
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsD'EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsPas encore d'évaluation
- Equation D'état D'un Corps: Thème 4: Rapport Partiel 2Document6 pagesEquation D'état D'un Corps: Thème 4: Rapport Partiel 2ahmedPas encore d'évaluation
- Equation D'état D'un Corps: Thème 4Document6 pagesEquation D'état D'un Corps: Thème 4ahmedPas encore d'évaluation
- Equation D'état D'un Corps: Thème 4Document4 pagesEquation D'état D'un Corps: Thème 4ahmedPas encore d'évaluation
- Equation D'état D'un Corps Rapport Partiel 3:: Thème 4Document5 pagesEquation D'état D'un Corps Rapport Partiel 3:: Thème 4ahmedPas encore d'évaluation
- Equation D'état D'un Corps: Thème 4Document7 pagesEquation D'état D'un Corps: Thème 4ahmedPas encore d'évaluation
- ListeDocument1 pageListeahmedPas encore d'évaluation
- gr3 P2 S1 RapportDocument32 pagesgr3 P2 S1 RapportahmedPas encore d'évaluation
- Presentation PE 2022 2023Document27 pagesPresentation PE 2022 2023ahmedPas encore d'évaluation
- Rapport1 G2Document8 pagesRapport1 G2ahmedPas encore d'évaluation
- DocumentDocument151 pagesDocumentahmedPas encore d'évaluation
- Resultat PeDocument2 pagesResultat PeahmedPas encore d'évaluation
- Table Des MatièresDocument1 pageTable Des MatièresahmedPas encore d'évaluation
- Rapport4 T1 G2DDocument9 pagesRapport4 T1 G2DahmedPas encore d'évaluation
- Rapport FinalDocument99 pagesRapport FinalahmedPas encore d'évaluation
- Rapport FinalDocument32 pagesRapport FinalahmedPas encore d'évaluation
- S5. Initiation À La Prog Avec Le Langage CDocument15 pagesS5. Initiation À La Prog Avec Le Langage CahmedPas encore d'évaluation
- Emines Cpi1aDocument1 pageEmines Cpi1aahmedPas encore d'évaluation
- TD PFD Cpi 1a 221005 101609Document5 pagesTD PFD Cpi 1a 221005 101609ahmedPas encore d'évaluation
- AymanDocument1 pageAymanahmedPas encore d'évaluation
- Notes 220220 133536 E2aDocument5 pagesNotes 220220 133536 E2aahmedPas encore d'évaluation
- Rapport Final Numero 1 Groupe 1 de CP 1-A - CorDocument10 pagesRapport Final Numero 1 Groupe 1 de CP 1-A - CorahmedPas encore d'évaluation
- Rapport1 G2Document8 pagesRapport1 G2ahmedPas encore d'évaluation
- TP AcoustiqueDocument2 pagesTP AcoustiqueahmedPas encore d'évaluation
- DL 4Document2 pagesDL 4ahmedPas encore d'évaluation
- S5. Initiation À La Programmation Avec Le Langage CDocument38 pagesS5. Initiation À La Programmation Avec Le Langage CahmedPas encore d'évaluation
- TP1 - C - Correction TPDocument4 pagesTP1 - C - Correction TPahmedPas encore d'évaluation
- Cours StructuresDocument13 pagesCours StructuresahmedPas encore d'évaluation
- CoursAudacity Id6150Document11 pagesCoursAudacity Id6150ahmedPas encore d'évaluation
- Theme3 1A 2022 EgaliseurDocument1 pageTheme3 1A 2022 EgaliseurahmedPas encore d'évaluation
- DS 4 - Class 2025Document3 pagesDS 4 - Class 2025ahmedPas encore d'évaluation
- Hamza Amghar RapportDocument39 pagesHamza Amghar Rapporthamza amgharPas encore d'évaluation
- HESSAS Mémoire DoctoratDocument162 pagesHESSAS Mémoire DoctoratMimi AniaPas encore d'évaluation
- Compte Rendu Du TP N CBDocument9 pagesCompte Rendu Du TP N CBMourad TlmPas encore d'évaluation
- TD FormesBilineairesQuadratiquesDocument7 pagesTD FormesBilineairesQuadratiquesArthur MoloPas encore d'évaluation
- Chapitre 1Document14 pagesChapitre 1ABDESSALAM MOHAIMIPas encore d'évaluation
- 2018 19 Examen Mai CorrectionDocument5 pages2018 19 Examen Mai CorrectionRidersPas encore d'évaluation
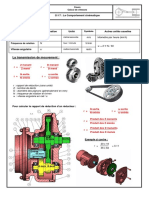
- MSOST 1 6 C2 MF Principe de Fonctionnement D'un Capteur D'un Codeur D'un DétecteurDocument3 pagesMSOST 1 6 C2 MF Principe de Fonctionnement D'un Capteur D'un Codeur D'un Détecteureb rychessePas encore d'évaluation
- Automorphismes OrthogonauxDocument4 pagesAutomorphismes OrthogonauxDUFOURPas encore d'évaluation
- Electromagnétisme Dans Le Vide PDFDocument20 pagesElectromagnétisme Dans Le Vide PDFsatoufPas encore d'évaluation
- ComposantsPassifs MultonDocument91 pagesComposantsPassifs MultontittouPas encore d'évaluation
- Physique 19Document20 pagesPhysique 19Meryem ELMOGHRTIPas encore d'évaluation
- 19 20 S4Document1 page19 20 S4pallap palPas encore d'évaluation
- Calcul de VitessesDocument2 pagesCalcul de VitessesOualid OuadoudiPas encore d'évaluation
- Laplace TPDocument4 pagesLaplace TPHanine HmidaPas encore d'évaluation
- Regimes Torrentiel FluvialDocument2 pagesRegimes Torrentiel FluvialchoaybPas encore d'évaluation
- Cours de Mécanique Des Fluides - Chapitre 2 - Groupe 9Document14 pagesCours de Mécanique Des Fluides - Chapitre 2 - Groupe 9nicko NickopPas encore d'évaluation
- TopologieDocument28 pagesTopologieFranck arnaultPas encore d'évaluation
- MAGISTER. GEE. HACHEMI Naima Nee SEBBATIDocument159 pagesMAGISTER. GEE. HACHEMI Naima Nee SEBBATIhissein ousmanPas encore d'évaluation
- Série DDocument7 pagesSérie DMessAoudi SaBerPas encore d'évaluation
- 6SL3210-1PE22-7UL0 Datasheet FR enDocument3 pages6SL3210-1PE22-7UL0 Datasheet FR enVladimir Mar Roüchköff DioufPas encore d'évaluation
- Exophotom 2Document2 pagesExophotom 2dallagi mohamedPas encore d'évaluation
- Modélisation Et Étude Des Réseaux ÉlectriquesDocument36 pagesModélisation Et Étude Des Réseaux Électriquesfarid saadPas encore d'évaluation
- Résumé Produit Scalaire Plan 1bacDocument1 pageRésumé Produit Scalaire Plan 1bacjilalixmcPas encore d'évaluation
- 3cas Particulier FCT Peigne DiracDocument2 pages3cas Particulier FCT Peigne DirachamzaPas encore d'évaluation
- Marc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Document495 pagesMarc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Erick TetsadjioPas encore d'évaluation
- 2797Document4 pages2797Mohammed AmliehPas encore d'évaluation
- Prof: Fayssal: Exercice 01Document11 pagesProf: Fayssal: Exercice 01Safaa Nac50% (2)
- Résumé Et TD RDM TractionDocument23 pagesRésumé Et TD RDM TractionRym KrPas encore d'évaluation
- 7.1 Cours À Remplir FONCTION 3eme Janv2022Document3 pages7.1 Cours À Remplir FONCTION 3eme Janv2022Marguerite DuncanPas encore d'évaluation
- BobineDocument5 pagesBobineAmine MohamedPas encore d'évaluation