Vous aimerez peut-être aussi
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
- NavigationDocument12 pagesNavigationAris SeaPas encore d'évaluation
- LnheDocument3 pagesLnhepirodiazPas encore d'évaluation
- Methode Et Techniques de Mesure de Transports Solides Das Les TorrentsDocument19 pagesMethode Et Techniques de Mesure de Transports Solides Das Les TorrentsBannon BannonPas encore d'évaluation
- guideTechniqueCanauxVenturi v2.0Document17 pagesguideTechniqueCanauxVenturi v2.0BoucheferPas encore d'évaluation
- Les Sources D'erreur en Gravimetrie MarineDocument23 pagesLes Sources D'erreur en Gravimetrie Marineprouserdesigner77Pas encore d'évaluation
- FicheC1-7-Guide Auscultation Ouvrage Art-Cahier Interactif IfsttarDocument3 pagesFicheC1-7-Guide Auscultation Ouvrage Art-Cahier Interactif IfsttarMarjoël HouinatoPas encore d'évaluation
- FHDocument10 pagesFHAmal Elourak100% (1)
- Divers Aspects de L'exploitation de L'energie Des Courants MarinsDocument22 pagesDivers Aspects de L'exploitation de L'energie Des Courants MarinsMohamed El Hadi RedjaimiaPas encore d'évaluation
- Anatomie D'un Système Récupérateur D'énergie Des Vagues de Seconde GénérationDocument14 pagesAnatomie D'un Système Récupérateur D'énergie Des Vagues de Seconde GénérationMed MedPas encore d'évaluation
- Capteurs de DébitDocument14 pagesCapteurs de Débitsko88100% (1)
- Tipe HYDROLIENNEDocument8 pagesTipe HYDROLIENNEel_mokri100% (2)
- Chap - Ii. Les PrecipitationsDocument49 pagesChap - Ii. Les PrecipitationsElla Eea Ran100% (1)
- Chapitre 2 Distribution Du Vent PDFDocument12 pagesChapitre 2 Distribution Du Vent PDFZino MohPas encore d'évaluation
- Pour faciliter-WPS OfficeDocument14 pagesPour faciliter-WPS OfficeIsaac EkutshuPas encore d'évaluation
- Aidouni 210Document12 pagesAidouni 210merzak seghirPas encore d'évaluation
- Géotechnique AvancéeDocument43 pagesGéotechnique AvancéeAlgerian Journal of Research and TechnologyPas encore d'évaluation
- 2022 MP SI MinesPonts SDocument26 pages2022 MP SI MinesPonts Sleobrut28Pas encore d'évaluation
- 2011 Dimensionnement Support Antenne F1AHO PDFDocument11 pages2011 Dimensionnement Support Antenne F1AHO PDFhamcha1969Pas encore d'évaluation
- Cours Hydrologie Générale - CH 07Document15 pagesCours Hydrologie Générale - CH 07abdelhamidPas encore d'évaluation
- Barrages Et Digues 1Document519 pagesBarrages Et Digues 1dionguesaliou873Pas encore d'évaluation
- Tipe Nizar EttaibDocument19 pagesTipe Nizar EttaibNizar EttaibPas encore d'évaluation
- Pelamis VfinaleDocument34 pagesPelamis VfinaleMoussali OussamaPas encore d'évaluation
- Simulation Numérique D'une Vague DéferlanteDocument26 pagesSimulation Numérique D'une Vague DéferlanteBernard SCHAEFFERPas encore d'évaluation
- Calcul Des DébitsDocument32 pagesCalcul Des Débitsyoussouf ahmedbabaPas encore d'évaluation
- Chapitre 2 Instruments de La PluviométrieDocument33 pagesChapitre 2 Instruments de La Pluviométrielazr lazriPas encore d'évaluation
- Rapport Rami 3aDocument18 pagesRapport Rami 3arami ouerghiPas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- Roche Hydr Surf CH 04Document49 pagesRoche Hydr Surf CH 04abimanaPas encore d'évaluation
- Soutenance de These JTDocument38 pagesSoutenance de These JTFATIMA-ZAHRAE ROUASPas encore d'évaluation
- MDF1Document4 pagesMDF1benyfirstPas encore d'évaluation
- TIPEDocument19 pagesTIPENizar EttaibPas encore d'évaluation
- Tome 1 Connaissance Avion 2Document52 pagesTome 1 Connaissance Avion 2Mounir Fattah100% (1)
- CH2Clarification L3Document4 pagesCH2Clarification L3Abdelhani MoussaouiPas encore d'évaluation
- 0 Pluviomé TrieDocument9 pages0 Pluviomé TrieMar OuaPas encore d'évaluation
- Modele NDCDocument12 pagesModele NDCPhilip RichPas encore d'évaluation
- APL ProfilometroDocument8 pagesAPL ProfilometroElliot VancePas encore d'évaluation
- Calcul Du Potentiel Hydroélectrique Si Conduite Forcée InexistanteDocument8 pagesCalcul Du Potentiel Hydroélectrique Si Conduite Forcée InexistanteAnonymous bVFHovPas encore d'évaluation
- Capteurs NiveauxDocument9 pagesCapteurs NiveauxIlias MajidiPas encore d'évaluation
- Polymethodo Hydro Arfib 2 Pages Par FeuilleDocument4 pagesPolymethodo Hydro Arfib 2 Pages Par FeuillekouadioPas encore d'évaluation
- Projet GéodésieDocument20 pagesProjet GéodésieRichard Kpakpa SogloPas encore d'évaluation
- CI04 TD11 Sujet - D - Terminer Un Champ de Vecteur VitesseDocument6 pagesCI04 TD11 Sujet - D - Terminer Un Champ de Vecteur Vitessemed mahfoud bounaPas encore d'évaluation
- Chap V - Etude Des EcoulementsDocument23 pagesChap V - Etude Des EcoulementsNadiaa AdjoviPas encore d'évaluation
- Decca and OmegaDocument32 pagesDecca and OmegaAkram SaidiaPas encore d'évaluation
- DébimètresDocument16 pagesDébimètrestarek_bouzayaniPas encore d'évaluation
- PC GENE SUJET 039 Exo2 Phy Littoral LIDARDocument5 pagesPC GENE SUJET 039 Exo2 Phy Littoral LIDARElias AthanassiadisPas encore d'évaluation
- Le GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Document6 pagesLe GPS Différentiel (DGPS) Et Temps Réel (GPS RTK)Wadh MisPas encore d'évaluation
- Expose Sur Les DebitmetreDocument11 pagesExpose Sur Les DebitmetreAmine BensaadaPas encore d'évaluation
- Techniques de Mesure Des Paramètres Atmosphériques Avec GPS Pour L'évaluation Des Changements ClimatiquesDocument71 pagesTechniques de Mesure Des Paramètres Atmosphériques Avec GPS Pour L'évaluation Des Changements Climatiqueshocine230100% (1)
- Mini Projet de La Méthode GéophysiqueDocument7 pagesMini Projet de La Méthode Géophysiquewala tilouchePas encore d'évaluation
- 107 Dtu13 3anxc v8 0Document15 pages107 Dtu13 3anxc v8 0Abderrezak TahirPas encore d'évaluation
- Dimensionnement DessableurDocument2 pagesDimensionnement Dessableurzemabder100% (2)
- Dynamique Des Engins de Peche COPIEDocument41 pagesDynamique Des Engins de Peche COPIEMöhćîńé LāmīņēPas encore d'évaluation
- Prospection Géophysique Principe PDFDocument14 pagesProspection Géophysique Principe PDFYohann Offant100% (4)
- Les Modèles Numériques en Hydraulique Fluviale PDFDocument23 pagesLes Modèles Numériques en Hydraulique Fluviale PDFLahcenLakdimPas encore d'évaluation
- Cours 6 Eolien 2017Document4 pagesCours 6 Eolien 2017abd elhamid mabroukPas encore d'évaluation
- Navigation MaritimeDocument47 pagesNavigation Maritimemohamed gamerPas encore d'évaluation
- Capt EursDocument30 pagesCapt Eursقرين لطفيPas encore d'évaluation
- Antiracines Antirhizomes Mgs WebDocument2 pagesAntiracines Antirhizomes Mgs WebJUNGPHPas encore d'évaluation
- Flotteur en VerreDocument7 pagesFlotteur en VerreJUNGPHPas encore d'évaluation
- Vieux MetiersDocument36 pagesVieux MetiersflarescarabPas encore d'évaluation
- VocabulaireDocument2 pagesVocabulaireJUNGPHPas encore d'évaluation
- St02 2014 Aboudrar Poster v01Document1 pageSt02 2014 Aboudrar Poster v01JUNGPHPas encore d'évaluation
- Arval - Cofrastra 40Document16 pagesArval - Cofrastra 40helder.fradePas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- RSE & EthiqueDocument6 pagesRSE & Ethiquealemor2369Pas encore d'évaluation
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002100% (1)
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- Exam. F.CDocument2 pagesExam. F.CmidsmasherPas encore d'évaluation
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 page2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Pas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 pagesChapitre 1 LES OUTILS MATHEMATIQUESa.ddPas encore d'évaluation
- Marry Your Daughter Sheet - 1Document2 pagesMarry Your Daughter Sheet - 1Nurendung ZuliantoPas encore d'évaluation
- Depliant ELM MasterDocument3 pagesDepliant ELM MasterYazid AbouchihabeddinePas encore d'évaluation
- Analyse D'une Situation de Communication en TaDocument2 pagesAnalyse D'une Situation de Communication en Taroger martin bassong batiigPas encore d'évaluation
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Memoire Inj Messaoud BENZOUAIDocument168 pagesMemoire Inj Messaoud BENZOUAIManong ShegueyPas encore d'évaluation
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 pagesObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Pas encore d'évaluation
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 pagesTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Tube VentouriDocument10 pagesTube VentouriMohammed BoulbairPas encore d'évaluation
- ExcisionDocument54 pagesExcisionAbdou Razak OuédraogoPas encore d'évaluation
- TP2Document4 pagesTP2Youssef Don RajawiPas encore d'évaluation
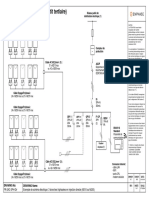
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Jadwal Genap 2223-2Document2 pagesJadwal Genap 2223-2nowo benyPas encore d'évaluation
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 pagesPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimPas encore d'évaluation