Vous aimerez peut-être aussi
- Etude D'une Installation Électrique PDFDocument8 pagesEtude D'une Installation Électrique PDFbyramPas encore d'évaluation
- Prescription UTEDocument111 pagesPrescription UTEBERTRAND VIEZ100% (1)
- Procedure Etconsignes Generees Par La Mise en Place Des BCC PDFDocument43 pagesProcedure Etconsignes Generees Par La Mise en Place Des BCC PDFAfef Neji100% (1)
- Process PDFDocument3 pagesProcess PDFIbrahim NabilPas encore d'évaluation
- GRID CODE CodeTransport2020Document72 pagesGRID CODE CodeTransport2020DIR DEPEPas encore d'évaluation
- Consignes Organisation de La MaintenanceDocument16 pagesConsignes Organisation de La MaintenanceNat ARPas encore d'évaluation
- M04 - Analyse de Circuits À C.C. GE-ESA PDFDocument7 pagesM04 - Analyse de Circuits À C.C. GE-ESA PDFHassan AzmiPas encore d'évaluation
- Code Deres e Aude TransportDocument73 pagesCode Deres e Aude TransportDIR DEPEPas encore d'évaluation
- Réseaux électriques مليطDocument28 pagesRéseaux électriques مليطAy OubPas encore d'évaluation
- TP3 QualitéDocument11 pagesTP3 QualitédiopPas encore d'évaluation
- 9 DRés Exploit D3.4 Procedures Générales de Travaux Urgents Sur Les Ouvrages HTA - v3Document16 pages9 DRés Exploit D3.4 Procedures Générales de Travaux Urgents Sur Les Ouvrages HTA - v3LOWE JOUONANG NARCISSE100% (1)
- Fiche Programme Planification OrdonnancmentDocument2 pagesFiche Programme Planification OrdonnancmentLeith LakhouaPas encore d'évaluation
- GUIDE BONNES Pratiques Electriques PDFDocument56 pagesGUIDE BONNES Pratiques Electriques PDFMoez Hannachi100% (1)
- Inphb2021 - Inge2i3 Init Install Chap2 1Document24 pagesInphb2021 - Inge2i3 Init Install Chap2 1Elie m'poue Gnamien100% (1)
- 1 Crs - Schemas App - CH1 2 - 3L EnR S5 - 2017 18Document24 pages1 Crs - Schemas App - CH1 2 - 3L EnR S5 - 2017 18Abdelghafour SaidiPas encore d'évaluation
- 3MMPE SNE2012 Rapport Com2 Distribution PDFDocument34 pages3MMPE SNE2012 Rapport Com2 Distribution PDFAbouZakariaPas encore d'évaluation
- Consignes D'exploit Ozt RRRRDocument13 pagesConsignes D'exploit Ozt RRRRSam Chetla100% (1)
- Conditions Raccordement Reseau Electricite Moyenne Tension C MTDocument6 pagesConditions Raccordement Reseau Electricite Moyenne Tension C MTSouhaila El MahjoubPas encore d'évaluation
- Directeur de Production - Taqa - Fiche de PosteDocument2 pagesDirecteur de Production - Taqa - Fiche de PosteRachid FaouziPas encore d'évaluation
- Qualite TechniDocument5 pagesQualite TechniMouhssen SalhiPas encore d'évaluation
- Exploitation de Lenergie Électrique - 22 - 23 (POLY)Document87 pagesExploitation de Lenergie Électrique - 22 - 23 (POLY)Hamza CHAIBOUBPas encore d'évaluation
- SûRETé - DE - FONCTIONNEMENT - MaintenabilitéDocument79 pagesSûRETé - DE - FONCTIONNEMENT - Maintenabilitékhaoula ECRPas encore d'évaluation
- Organisation de La MaintenanceDocument10 pagesOrganisation de La MaintenanceRachid KamimPas encore d'évaluation
- 1.1 Etude D'un Double Défaut Monophasé Sur Un Réseau HTA 1.1.1 ...Document6 pages1.1 Etude D'un Double Défaut Monophasé Sur Un Réseau HTA 1.1.1 ...Ismail MestariPas encore d'évaluation
- Republique Algerienne Democratique Et Populaire Societe NationalDocument10 pagesRepublique Algerienne Democratique Et Populaire Societe NationalSidali BmrPas encore d'évaluation
- Guide Cellules Fixes Client EffluvesDocument13 pagesGuide Cellules Fixes Client Effluvesrevelec33Pas encore d'évaluation
- Technicien MethodesDocument2 pagesTechnicien Methodesmohammed sadek benchafaaPas encore d'évaluation
- 05 - TD Introduction FMD PDFDocument5 pages05 - TD Introduction FMD PDFTriki BilelPas encore d'évaluation
- Elaboration D'un Plan de Contingence Pour Les Équipements Névralgiques - AIT EL HAJ BadiâDocument60 pagesElaboration D'un Plan de Contingence Pour Les Équipements Névralgiques - AIT EL HAJ BadiâOns KraiemPas encore d'évaluation
- Etude Du Plan de Protection Hta PDFDocument6 pagesEtude Du Plan de Protection Hta PDFOUSKRIPas encore d'évaluation
- Papa Matar Diène Méthode de Maintenance Et Pronostic Des Transformateurs de PuissanceDocument5 pagesPapa Matar Diène Méthode de Maintenance Et Pronostic Des Transformateurs de PuissancePapa Matar DIENE100% (1)
- Problematique de L'interconnexion Des Reseaux de Transport de L'energie Electrique en Afrique CentraleDocument77 pagesProblematique de L'interconnexion Des Reseaux de Transport de L'energie Electrique en Afrique CentralePlatini Kueda100% (1)
- Chapitre5 Modélisation Des Réseaux Électriques PDFDocument18 pagesChapitre5 Modélisation Des Réseaux Électriques PDFHada Mounir100% (1)
- Transport Distribution Energie ElectriqueDocument55 pagesTransport Distribution Energie ElectriqueYoucef MallekPas encore d'évaluation
- Agent ProcessDocument7 pagesAgent ProcessTOTO100% (1)
- Kpi MaintenanceDocument5 pagesKpi MaintenanceRadouan SahbPas encore d'évaluation
- IControl-T - Téléconduite de RéseauDocument6 pagesIControl-T - Téléconduite de RéseauJanssen N'GadiPas encore d'évaluation
- Selection Du Parafoudre Pour La Protection Des Postes de Transformation PDFDocument60 pagesSelection Du Parafoudre Pour La Protection Des Postes de Transformation PDFChoaib BendahouPas encore d'évaluation
- 11 ELT Machines ElectriquesDocument76 pages11 ELT Machines ElectriquesFifi JojoPas encore d'évaluation
- Raccordement Réseau - Cre - Prescriptions TechniquesDocument3 pagesRaccordement Réseau - Cre - Prescriptions Techniqueschris100% (1)
- Démarche Études PréliminaireDocument15 pagesDémarche Études PréliminaireMOHAMMAD AMOURAKPas encore d'évaluation
- Brochure de TP Techniques de Protection Électrique - BELOUCIF FAISSEL - 2019 PDFDocument63 pagesBrochure de TP Techniques de Protection Électrique - BELOUCIF FAISSEL - 2019 PDFMathurin Edmond WOLAE100% (1)
- Formation Rapport de Stage 2Document11 pagesFormation Rapport de Stage 2Zellagui EnergyPas encore d'évaluation
- Grid Code Enr 5e2eeee002101Document137 pagesGrid Code Enr 5e2eeee002101ouali fatehPas encore d'évaluation
- CHAPITRE II Techniques de Diagnostic Et Maintenance TransformateursDocument29 pagesCHAPITRE II Techniques de Diagnostic Et Maintenance TransformateursMohamed DjebbiPas encore d'évaluation
- Prescriptions Et ConsignesDocument3 pagesPrescriptions Et ConsignesFrance3AlsacePas encore d'évaluation
- Recueil Securite Salle Machines OutilsDocument29 pagesRecueil Securite Salle Machines OutilsRevival JamPas encore d'évaluation
- 01 - Diaporama - 07 01 2020 - SDEC - Réseau - ElectriqueDocument45 pages01 - Diaporama - 07 01 2020 - SDEC - Réseau - ElectriqueGray-Phenol MILANDOU MILANDOUPas encore d'évaluation
- Chapitre I Cours de Transport Et Distribution de L'energie ElectriquepdfDocument22 pagesChapitre I Cours de Transport Et Distribution de L'energie ElectriquepdfTharcisse KANAPas encore d'évaluation
- Doctrine Distribution - VERSION FINALEDocument44 pagesDoctrine Distribution - VERSION FINALEGUY-FABRE DJILE100% (1)
- PROTECTION D'UNE LIGNE MOYENNE TENSION 30Kv Année Universitaire - 2021 - 2022Document117 pagesPROTECTION D'UNE LIGNE MOYENNE TENSION 30Kv Année Universitaire - 2021 - 2022Fayçal LouahalaPas encore d'évaluation
- 1-Symbolisation Et Schémas Électriques - 20210309Document59 pages1-Symbolisation Et Schémas Électriques - 20210309ait moussa lailaPas encore d'évaluation
- 5 4 2 En50160Document19 pages5 4 2 En50160kamPas encore d'évaluation
- Risques ElectriquesDocument49 pagesRisques Electriqueste rachidPas encore d'évaluation
- Caracteristiques PDFDocument45 pagesCaracteristiques PDFLhou Khalid100% (1)
- (CDG61) - Verification Des Installations ElectriquesDocument5 pages(CDG61) - Verification Des Installations ElectriquesLOWE JOUONANG NARCISSEPas encore d'évaluation
- Schneider Electric - Cahier Technique 170 - Des Transformateurs de Courant Aux Capteurs Hybrides en HTDocument24 pagesSchneider Electric - Cahier Technique 170 - Des Transformateurs de Courant Aux Capteurs Hybrides en HTZorbanfrPas encore d'évaluation
- MF37 009 R05aDocument433 pagesMF37 009 R05aquangtam99Pas encore d'évaluation
- TELEMECANIQUE Guide D'exploitation ATV31Document84 pagesTELEMECANIQUE Guide D'exploitation ATV31Ali Al LabiàdPas encore d'évaluation
- MTS 443Document16 pagesMTS 443Jlassi TarekPas encore d'évaluation
- TD2 Variables Aleã AtoiresDocument2 pagesTD2 Variables Aleã AtoiresismailasanguesowPas encore d'évaluation
- Chapitre 2Document83 pagesChapitre 2Midou MhmdPas encore d'évaluation
- BenchmarkDocument7 pagesBenchmarkSonia YameogoPas encore d'évaluation
- Note de Calcul Reseau GazDocument1 pageNote de Calcul Reseau GazDjamal Mohammedi100% (1)
- P1 MHS DFM C Us01 CR 0001 - 09 - A PDFDocument322 pagesP1 MHS DFM C Us01 CR 0001 - 09 - A PDFNoelia GarcíaPas encore d'évaluation
- Fiche Maths Terminale 1Document1 pageFiche Maths Terminale 1Pierre100% (1)
- Support Du Cours Fours IndustrielsDocument56 pagesSupport Du Cours Fours IndustrielsAustin C Lynch100% (1)
- La Phrase InterrogativeDocument4 pagesLa Phrase Interrogativesamirfun2006Pas encore d'évaluation
- HSEDocument95 pagesHSESalissou Salha100% (1)
- Programme de Révisions DST n4Document2 pagesProgramme de Révisions DST n4lola21035Pas encore d'évaluation
- FF Electronique m2Document7 pagesFF Electronique m2yaminoPas encore d'évaluation
- Comprehension Et Expression OraleDocument30 pagesComprehension Et Expression Oraleيوسف عسلي67% (3)
- 1519 Problmes Conomiques Comprendre L Conomie MondialeDocument124 pages1519 Problmes Conomiques Comprendre L Conomie MondialeThomas le sage100% (1)
- Turboexpander For LNG PlantDocument9 pagesTurboexpander For LNG PlantArsa Setya DewantaPas encore d'évaluation
- IntegrationDocument71 pagesIntegrationAkpo ArmandPas encore d'évaluation
- Analyse Fonctionnelle BTS UniveriaDocument10 pagesAnalyse Fonctionnelle BTS UniveriaYounes AblePas encore d'évaluation
- Philip Pettit Isaiah BerlinDocument32 pagesPhilip Pettit Isaiah BerlinRoberta Soromenho NicoletePas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1Haboussi MeriemPas encore d'évaluation
- TDN1etude D'un Reseau D'assnissement D'un Ville TouristiqueDocument6 pagesTDN1etude D'un Reseau D'assnissement D'un Ville TouristiqueSmaïl KhelifaPas encore d'évaluation
- Les Fausses Confidences, Marivaux Acte I Scène 14 AnalyseDocument1 pageLes Fausses Confidences, Marivaux Acte I Scène 14 AnalyseSuper YakiwPas encore d'évaluation
- Examen TP MS Project Février 20-21Document3 pagesExamen TP MS Project Février 20-21Hamza BN100% (1)
- CH3 Conversion de Lénergie ÉolienneDocument7 pagesCH3 Conversion de Lénergie ÉolienneSalmi Nour E'ddinePas encore d'évaluation
- TP ORCAD Simulation Analogique Filtres PDocument13 pagesTP ORCAD Simulation Analogique Filtres PKAPAGNAN MOHAMED KONEPas encore d'évaluation
- Esi-Cours LLC PDFDocument10 pagesEsi-Cours LLC PDFVivo Vivoo VIPas encore d'évaluation
- Uc 15 CPUDocument7 pagesUc 15 CPURayan En-NougaouiPas encore d'évaluation
- Guide Technique 2013 BUSCADocument292 pagesGuide Technique 2013 BUSCAmatheuroquencourt100% (1)
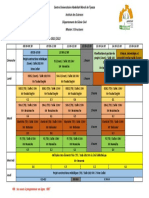
- Emploi Du Temps M1 - S2 - 2021-2022Document1 pageEmploi Du Temps M1 - S2 - 2021-2022TOUBAL SEGHIR NadhirPas encore d'évaluation
- Rapport Final (1) - CopieDocument44 pagesRapport Final (1) - Copiefatima zahra lmaalemPas encore d'évaluation
- Guide Explicatif - Mon Répertoire Orthographique Pour Écrire (RETZ)Document8 pagesGuide Explicatif - Mon Répertoire Orthographique Pour Écrire (RETZ)Pierre Quantin100% (1)
- EconometrieDocument118 pagesEconometrieIbtissam JoubaPas encore d'évaluation