Vous aimerez peut-être aussi
- Position D Un Solide CorrigeDocument4 pagesPosition D Un Solide Corrigekurts010Pas encore d'évaluation
- Concours ThermodyamiqueDocument4 pagesConcours ThermodyamiqueYouness TalbiPas encore d'évaluation
- TD 18 Corrigé - Loi Entrée-Sortie Par Fermeture GéométriqueDocument4 pagesTD 18 Corrigé - Loi Entrée-Sortie Par Fermeture GéométriqueImen Hammouda100% (2)
- MA Cours Resume Reduit 2020 Exercices Type ContrôleDocument6 pagesMA Cours Resume Reduit 2020 Exercices Type ContrôleMarouan ZahriPas encore d'évaluation
- Devoir 2 78Document5 pagesDevoir 2 78anoiriPas encore d'évaluation
- DS4 (12-13) - CorrDocument3 pagesDS4 (12-13) - CorrEren JägerPas encore d'évaluation
- h3 - TC - Automatique - Qca 2003 2004 - Hei 33 34 - Qca Hei 33 34 - 1489Document2 pagesh3 - TC - Automatique - Qca 2003 2004 - Hei 33 34 - Qca Hei 33 34 - 1489Nabil LivePas encore d'évaluation
- MQ-TD & ExamensDocument37 pagesMQ-TD & ExamensFatima ElmourabitPas encore d'évaluation
- TP # - 2 PDFDocument6 pagesTP # - 2 PDFAya IrmaPas encore d'évaluation
- Magnétostatique EPI 2022 2023Document3 pagesMagnétostatique EPI 2022 2023La Gloire SuprêmePas encore d'évaluation
- La Mécanique Des RochesDocument27 pagesLa Mécanique Des RochesAbdessalam EchakiriPas encore d'évaluation
- CNC2023-Corrigé MP-PSI 2Document16 pagesCNC2023-Corrigé MP-PSI 2Aya HajriPas encore d'évaluation
- TD 02Document6 pagesTD 02abdousewager8080Pas encore d'évaluation
- Devoir 5 SM Biof Arsalan PDFDocument3 pagesDevoir 5 SM Biof Arsalan PDFMed BriniPas encore d'évaluation
- 0B W Sprn2GfpalJVTy1FM2FNNVkDocument2 pages0B W Sprn2GfpalJVTy1FM2FNNVkAsma BousamePas encore d'évaluation
- Calculs de Champs Par Le Théorème de GaussDocument1 pageCalculs de Champs Par Le Théorème de GaussChérif Moulay Adam AtirPas encore d'évaluation
- SN PB SN PB: K Est Basculé À La Position 1Document3 pagesSN PB SN PB: K Est Basculé À La Position 1Abdellah BelhassanePas encore d'évaluation
- TD1 2020Document2 pagesTD1 2020Lamyae ChPas encore d'évaluation
- TP 1Document18 pagesTP 1Mohammed ALMUSHIAAPas encore d'évaluation
- Ondes Et PropagationsDocument17 pagesOndes Et PropagationsAliOucharPas encore d'évaluation
- 2001 Hec S 1 Suj MSW ADocument3 pages2001 Hec S 1 Suj MSW AMarc TentiPas encore d'évaluation
- Mécanique Quantique - TD Et ExamensDocument29 pagesMécanique Quantique - TD Et Examenselmouainiabdelhakim9Pas encore d'évaluation
- EM6 Élèves 2 REMPLIDocument30 pagesEM6 Élèves 2 REMPLIilyass doukPas encore d'évaluation
- TD N 3 SolutionDocument3 pagesTD N 3 SolutionSamira ChochoPas encore d'évaluation
- Préparation Concours Statique 2024 - CorrigéDocument8 pagesPréparation Concours Statique 2024 - CorrigéilyassouadaniPas encore d'évaluation
- CHMP Demi Anneau PDFDocument1 pageCHMP Demi Anneau PDFKhalid ZegPas encore d'évaluation
- Série N°0 TCHMMDocument1 pageSérie N°0 TCHMMOUSSAMA BOUZEGAOUPas encore d'évaluation
- Séries Mouvement Dans Le Champs Électrique (MR Abdelkarim El Najar)Document3 pagesSéries Mouvement Dans Le Champs Électrique (MR Abdelkarim El Najar)abadmariem80Pas encore d'évaluation
- TP01 ELN1 Template 2021-2022Document6 pagesTP01 ELN1 Template 2021-2022Ahmed Be yahakemPas encore d'évaluation
- Ex CorrDocument55 pagesEx CorrKhalid ZegPas encore d'évaluation
- Ex CorrDocument55 pagesEx CorrKhalid ZegPas encore d'évaluation
- DV Toussaint S32016 Maj1Document4 pagesDV Toussaint S32016 Maj1Gray AbPas encore d'évaluation
- Biot Savart Application PDFDocument2 pagesBiot Savart Application PDFL'ardu Sory SidibePas encore d'évaluation
- Microsoft Word - TD - Serie1Document2 pagesMicrosoft Word - TD - Serie1Driss Miral Achemlal0% (1)
- TD3 - Oscillateurs: A - Travaux DirigésDocument3 pagesTD3 - Oscillateurs: A - Travaux DirigésDavid VHOUMBYPas encore d'évaluation
- Le Mouvement D'un Projetile Dans Un Plan FR Prof - Sbiro (WWW - Pc1.ma)Document2 pagesLe Mouvement D'un Projetile Dans Un Plan FR Prof - Sbiro (WWW - Pc1.ma)Oussama ZnPas encore d'évaluation
- TD Electromag Rev CPI2A 1819Document4 pagesTD Electromag Rev CPI2A 1819Mohammed-Amine AkoudadPas encore d'évaluation
- Electromag C2 TDDocument7 pagesElectromag C2 TDcazzac24Pas encore d'évaluation
- Chapitre 3 Modelisation Dynamique Machine Synchrone TriphaseeDocument13 pagesChapitre 3 Modelisation Dynamique Machine Synchrone TriphaseeIslam MęĐjPas encore d'évaluation
- Echelle1 PDFDocument2 pagesEchelle1 PDFDaboPas encore d'évaluation
- DS 1 - CorrectionDocument4 pagesDS 1 - CorrectionTN HUNTERSPas encore d'évaluation
- Examen Mécanique Des Milieux Continus SMP S6 2014-2015 FSSMDocument2 pagesExamen Mécanique Des Milieux Continus SMP S6 2014-2015 FSSMMohmad Fraji50% (2)
- Examen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFDocument2 pagesExamen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFazzamPas encore d'évaluation
- TD E6: Filtres Passifs: But Du ChapitreDocument4 pagesTD E6: Filtres Passifs: But Du ChapitreIBRAFAPas encore d'évaluation
- Terminal ELM 1920Document2 pagesTerminal ELM 1920pgerbaud8Pas encore d'évaluation
- TP Ov L2SM 2018 PDFDocument21 pagesTP Ov L2SM 2018 PDFAmani RebaiPas encore d'évaluation
- Complement Cours Osc Pont de WienDocument4 pagesComplement Cours Osc Pont de Wienassia guzel0% (1)
- Osc Pont de WienDocument4 pagesOsc Pont de Wienassia guzelPas encore d'évaluation
- Devoirs Spe MpSIDocument11 pagesDevoirs Spe MpSIياسين بوعيشي100% (1)
- 2009 03 NelleCaledo Exo1 Sujet Balancoire 6 5ptsDocument4 pages2009 03 NelleCaledo Exo1 Sujet Balancoire 6 5ptsMateus Pimenta CardosoPas encore d'évaluation
- TD 1 MA 2020 VFaDocument8 pagesTD 1 MA 2020 VFaMohamed FoudalPas encore d'évaluation
- Cours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFDocument9 pagesCours - Génie Mécanique - Cotation Fonctionnelle - 3ème Technique (2018-2019) MR Dhifaoui Abdelwaheb PDFYounes YounssPas encore d'évaluation
- TP2 Microscope AcoustiqueDocument15 pagesTP2 Microscope AcoustiqueTarek TahraouiPas encore d'évaluation
- TD N°3 SMIA S3 2013-2014Document2 pagesTD N°3 SMIA S3 2013-2014Houssein EL GHARSPas encore d'évaluation
- TD4 - Dynamique ReseauDocument8 pagesTD4 - Dynamique ReseauDaoud El CaidPas encore d'évaluation
- 4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CDocument4 pages4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CMamoo MoutiâPas encore d'évaluation
- Page 1 ExercDocument1 pagePage 1 ExercMohammed Amine BaguiPas encore d'évaluation
- Examens CRG Méca. Quantique LL (UIZ-AGADIR)Document77 pagesExamens CRG Méca. Quantique LL (UIZ-AGADIR)elameranymohamed085Pas encore d'évaluation
- TP 1 - Essai de Traction (A)Document7 pagesTP 1 - Essai de Traction (A)AbderrahimPas encore d'évaluation
- Chapitre 2 Liaison Complete ProfDocument8 pagesChapitre 2 Liaison Complete ProfchaudronnierPas encore d'évaluation
- VerinDocument1 pageVerinSerge bonel DafonsecaPas encore d'évaluation
- Planning TP-IMT1 S5-22-23 PDFDocument1 pagePlanning TP-IMT1 S5-22-23 PDFfatima zohra El KassimiPas encore d'évaluation
- Chapitre III Taillage Des EngrenagesDocument6 pagesChapitre III Taillage Des EngrenagesMehdi Hassine100% (1)
- Construction Mécanique 2Document75 pagesConstruction Mécanique 2yassir aboulcaidPas encore d'évaluation
- 9 1 Lista de Peças TASKI Ergodisc 165 PDFDocument29 pages9 1 Lista de Peças TASKI Ergodisc 165 PDFHildenira SousaPas encore d'évaluation
- RJ 29.07.2020 PDFDocument9 pagesRJ 29.07.2020 PDFAmi NePas encore d'évaluation
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiPas encore d'évaluation
- Corriges Mécanique Lève Moto EtDocument2 pagesCorriges Mécanique Lève Moto EtDavid Jay100% (1)
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
- Pièces de Rechange Spare Parts ErsatzteileDocument47 pagesPièces de Rechange Spare Parts ErsatzteileRolandas Petkus100% (1)
- Présentation Theme 4Document33 pagesPrésentation Theme 4Mamadou lamine CissePas encore d'évaluation
- Planter 3 (E)Document462 pagesPlanter 3 (E)Aleksandr PyrogovPas encore d'évaluation
- TD #1 Assemblages Poutre-PoteauDocument47 pagesTD #1 Assemblages Poutre-PoteauEagle EyePas encore d'évaluation
- AGBEGNIADAN Kodjovi CasimirDocument3 pagesAGBEGNIADAN Kodjovi CasimirCasimir AgbegniadanPas encore d'évaluation
- DésalignementDocument2 pagesDésalignementKhaireddine Saada KhelkhalPas encore d'évaluation
- Atelier BoisDocument16 pagesAtelier BoisanonymezoltarPas encore d'évaluation
- Applications - Fondation SuperficielleDocument6 pagesApplications - Fondation SuperficielleNarimane BoulkariaPas encore d'évaluation
- CPI1 CONST TD Exercices EngrenagesDocument4 pagesCPI1 CONST TD Exercices Engrenagesyassine lakhalPas encore d'évaluation
- Normes D'installation Des Enseignes Lumineuses (NF C15-150-X)Document2 pagesNormes D'installation Des Enseignes Lumineuses (NF C15-150-X)gillourun0% (2)
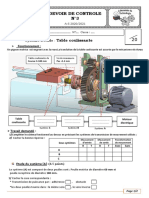
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- Liste Des CoefficientsDocument2 pagesListe Des CoefficientsTouoyemPas encore d'évaluation
- La Rectification Cylindrique Et ConiqueDocument9 pagesLa Rectification Cylindrique Et ConiqueAbderrazak MiassarPas encore d'évaluation
- Malaxeur EtuCine1Document4 pagesMalaxeur EtuCine1hhhhhhhhPas encore d'évaluation
- Scie À Sol FS130 - FS170: R:/technik/techdoku/english/fs/130-170/02821700989.inddDocument42 pagesScie À Sol FS130 - FS170: R:/technik/techdoku/english/fs/130-170/02821700989.inddb7tzwipoPas encore d'évaluation
- Colchester Chipmaster Manuel FRDocument72 pagesColchester Chipmaster Manuel FRfarid said errahmaniPas encore d'évaluation
- Generalites OsteosynthesesDocument118 pagesGeneralites Osteosynthesesabdel rocPas encore d'évaluation
- (K) SELM - Levage Et ManutentionDocument164 pages(K) SELM - Levage Et ManutentionpierrePas encore d'évaluation
- 01 Synth Se de Fondations Superficielles R3CI 1700211333Document9 pages01 Synth Se de Fondations Superficielles R3CI 1700211333Bebel AzooPas encore d'évaluation