Vous aimerez peut-être aussi
- Torseur Cinematique CorrigeDocument2 pagesTorseur Cinematique CorrigeAmal Fatouh100% (1)
- Fiche Meca gmp1 PDFDocument3 pagesFiche Meca gmp1 PDFGuillaume MeynetPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- CNC2023-Corrigé MP-PSI 2Document16 pagesCNC2023-Corrigé MP-PSI 2Aya HajriPas encore d'évaluation
- Centre D Usinage 5 Axes CorrigeDocument2 pagesCentre D Usinage 5 Axes CorrigeLAILA IDRISSIPas encore d'évaluation
- Contrôle 8fevrier2023 CorrectionDocument10 pagesContrôle 8fevrier2023 CorrectionAissata BaPas encore d'évaluation
- TP CommandeElectronique Des Machines - 2023 - GECDocument8 pagesTP CommandeElectronique Des Machines - 2023 - GECHicham BaghdadiPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- TD 23 Corrigé - Modélisation Des AM À Distance (Cas de La Pesanteur) PDFDocument7 pagesTD 23 Corrigé - Modélisation Des AM À Distance (Cas de La Pesanteur) PDFHabibaZenatiPas encore d'évaluation
- DM emDocument38 pagesDM emVăn TrầnPas encore d'évaluation
- CC1 18-19 Corrigé Mecanique IndustrielDocument8 pagesCC1 18-19 Corrigé Mecanique IndustrielKarima HamdanPas encore d'évaluation
- Eléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFDocument4 pagesEléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFyasser bhPas encore d'évaluation
- Sec Minesponts 2006 Sic MPDocument17 pagesSec Minesponts 2006 Sic MPBrahim AchayfadPas encore d'évaluation
- Cinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Document11 pagesCinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Douas MohamedPas encore d'évaluation
- PFD PDFDocument2 pagesPFD PDFDamien MirandaPas encore d'évaluation
- 2-Trous D - Young CorrectionDocument1 page2-Trous D - Young Correctionmohammedaittaleb25Pas encore d'évaluation
- Robot Spirit: 1 PrésentationDocument7 pagesRobot Spirit: 1 Présentationmxmzllr2Pas encore d'évaluation
- Commande Multivariable de Moteur AsynchroneDocument22 pagesCommande Multivariable de Moteur AsynchroneMohamed Riyad Boudallaa100% (1)
- Série N°0 TCHMMDocument1 pageSérie N°0 TCHMMOUSSAMA BOUZEGAOUPas encore d'évaluation
- Prã©paration Concours 2020 Cinã©matique Des Solides FormulaireDocument12 pagesPrã©paration Concours 2020 Cinã©matique Des Solides FormulaireNowe AhmadePas encore d'évaluation
- TD 1 MA 2020 VFaDocument8 pagesTD 1 MA 2020 VFaMohamed FoudalPas encore d'évaluation
- Revision Electricite PR SEDRA PDFDocument19 pagesRevision Electricite PR SEDRA PDFASMAPas encore d'évaluation
- DL 4Document5 pagesDL 4ML DouaaPas encore d'évaluation
- D1 2S1 2019 LSLL Wahab-DiopDocument2 pagesD1 2S1 2019 LSLL Wahab-DiopMagatte DiopPas encore d'évaluation
- TP2 Microscope AcoustiqueDocument15 pagesTP2 Microscope AcoustiqueTarek TahraouiPas encore d'évaluation
- Synthese 2007-2008Document9 pagesSynthese 2007-2008HamidPas encore d'évaluation
- Bouquet Dexercices CorrigésDocument14 pagesBouquet Dexercices Corrigéslilia Rabhi100% (1)
- 152 2 Pince Ericc3 Version2 CorrigeDocument2 pages152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmanePas encore d'évaluation
- Bentounsi - Dynamic 3 - MCCDocument6 pagesBentounsi - Dynamic 3 - MCCYahya OldhPas encore d'évaluation
- $examen Final S1 UM6PDocument5 pages$examen Final S1 UM6PIchrak madromiPas encore d'évaluation
- Chap2 Cinématique2Document33 pagesChap2 Cinématique2Yassine RakchoPas encore d'évaluation
- Cours Mécanique Du Solide - S3 Upload Par Mouhssine - Koussour by ExoSupDocument121 pagesCours Mécanique Du Solide - S3 Upload Par Mouhssine - Koussour by ExoSupzamora_1985Pas encore d'évaluation
- TP # - 2 PDFDocument6 pagesTP # - 2 PDFAya IrmaPas encore d'évaluation
- TD 1 Ma 2018 VF2Document8 pagesTD 1 Ma 2018 VF2Mohamed BelbarakaPas encore d'évaluation
- TP MDS (Version Finale)Document17 pagesTP MDS (Version Finale)salah chegriPas encore d'évaluation
- TP01 ELN1 Template 2021-2022Document6 pagesTP01 ELN1 Template 2021-2022Ahmed Be yahakemPas encore d'évaluation
- Examen Mécanique Des Milieux Continus SMP S6 2014-2015 FSSMDocument2 pagesExamen Mécanique Des Milieux Continus SMP S6 2014-2015 FSSMMohmad Fraji50% (2)
- Examen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFDocument2 pagesExamen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFazzamPas encore d'évaluation
- 12 Courbes D'équation en Coordonnées PolairesDocument24 pages12 Courbes D'équation en Coordonnées PolairesTarik ZiadPas encore d'évaluation
- TDChamps 2Document4 pagesTDChamps 2Jihane JoubairPas encore d'évaluation
- UTBM Mecanique-Du-solide 2007 TCDocument0 pageUTBM Mecanique-Du-solide 2007 TCLinda ToumiPas encore d'évaluation
- Chap2 Cinematique Du PointDocument12 pagesChap2 Cinematique Du PointNariko SwordPas encore d'évaluation
- CCP Fluide CinDocument7 pagesCCP Fluide CinSalah Eddine SafyounPas encore d'évaluation
- 4672345Document2 pages4672345SophaVisa KhunPas encore d'évaluation
- Examen MMC Jan 2010 Sujet Et CorrectionDocument3 pagesExamen MMC Jan 2010 Sujet Et CorrectionHoussem HassanetPas encore d'évaluation
- Correction Ex1 - TD2 Cinématique FST-BM 20-21Document3 pagesCorrection Ex1 - TD2 Cinématique FST-BM 20-21Oussama SafiPas encore d'évaluation
- Ecoulement Turbulent Entre Un Disque Tournant Et Un Disque Fixe, Influence Des Phenomenes D'entree Lies A La Valeur Finie Des RayonsDocument7 pagesEcoulement Turbulent Entre Un Disque Tournant Et Un Disque Fixe, Influence Des Phenomenes D'entree Lies A La Valeur Finie Des RayonsMartinFuckPas encore d'évaluation
- Corrigé Concours Blanc N°1 - 23-24Document3 pagesCorrigé Concours Blanc N°1 - 23-24yasser bhPas encore d'évaluation
- Cinematique CoursDocument3 pagesCinematique Courswelvye 1Pas encore d'évaluation
- 14-Dipole RayonnantDocument43 pages14-Dipole Rayonnantbouhrara faroukPas encore d'évaluation
- CC1 2013 2014Document3 pagesCC1 2013 2014Maryamę Ęl JaoiharįPas encore d'évaluation
- TP Physique Compte Rendu Force Centrifuge PDFDocument5 pagesTP Physique Compte Rendu Force Centrifuge PDFIk RamPas encore d'évaluation
- TD2 CorrectionDocument8 pagesTD2 CorrectionThibault TronchePas encore d'évaluation
- TD N°04 Transmission Par Frottement CorrectionDocument15 pagesTD N°04 Transmission Par Frottement CorrectionennajiPas encore d'évaluation
- 37 ds1 MP CinetiqueDocument5 pages37 ds1 MP Cinetiquesoufyane el ouahabiPas encore d'évaluation
- Cours 3 Modelisation Vectorielle de La MSDocument8 pagesCours 3 Modelisation Vectorielle de La MSYoussef romadiPas encore d'évaluation
- Rachid Mesrar Cours 1Document40 pagesRachid Mesrar Cours 1Younes EL BAHRAOUIPas encore d'évaluation
- 05 ACS CorrigeDocument39 pages05 ACS CorrigeRoméo Laimazava JeanPas encore d'évaluation
- These UTC Radhouane KhlissaDocument199 pagesThese UTC Radhouane KhlissaMehdiToukiPas encore d'évaluation
- IEC 60953-1-1990 ScanDocument168 pagesIEC 60953-1-1990 ScanMuhammad Dzaky FarhanPas encore d'évaluation
- TP1 SimulationDocument4 pagesTP1 SimulationBoudjaouiPas encore d'évaluation
- Conception Train D'atterrissageDocument49 pagesConception Train D'atterrissageKaoutar BouqdirPas encore d'évaluation
- TP 2. VibrationDocument7 pagesTP 2. Vibrationbekabdellah4Pas encore d'évaluation
- FR CatalogueNr3 YaleDocument392 pagesFR CatalogueNr3 YaleFirstpro100% (1)
- Performances Ew NoirDocument3 pagesPerformances Ew NoirJean-Noël LEROUXPas encore d'évaluation
- 2009 BAC SI Normale STM Corrigé PDFDocument5 pages2009 BAC SI Normale STM Corrigé PDFyassine yazidiPas encore d'évaluation
- Mouvements de L'eau Dans Les Sols Satures, Permeabilite (Essais en Laboratoire) Et Ecoulement PDFDocument14 pagesMouvements de L'eau Dans Les Sols Satures, Permeabilite (Essais en Laboratoire) Et Ecoulement PDFSerigne Mbacké SeyePas encore d'évaluation
- NoticeDocument12 pagesNoticeJavad MousavyPas encore d'évaluation
- Nettoyage ClarificateurDocument7 pagesNettoyage Clarificateurmimoon1Pas encore d'évaluation
- Poste A Souder Saf Digisteel 520Document184 pagesPoste A Souder Saf Digisteel 520Hamda Ben Haj YoussefPas encore d'évaluation
- 14-Liaison PivotDocument8 pages14-Liaison PivotN'GOLO MAMADOU KONEPas encore d'évaluation
- G PDFDocument34 pagesG PDFyassine22100% (1)
- Pompe À Chaleur Air/eau Réversible de Type Split: DescriptionDocument12 pagesPompe À Chaleur Air/eau Réversible de Type Split: DescriptioncorentinPas encore d'évaluation
- Cours Froid Solaire MPons Part 1 2Document56 pagesCours Froid Solaire MPons Part 1 2Kãrîm KåhlìPas encore d'évaluation
- Fiche de Révision - Analyse de Mouvements GymniquesDocument4 pagesFiche de Révision - Analyse de Mouvements GymniquesmokhtarkanPas encore d'évaluation
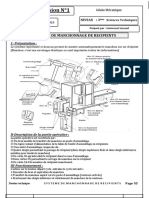
- Suj Et de Révision #1: Systeme de Manchonnage de RecipientsDocument3 pagesSuj Et de Révision #1: Systeme de Manchonnage de Recipientshamrouni100% (2)
- Echangeur Thermique 2 enDocument25 pagesEchangeur Thermique 2 enRihab100% (1)
- Examen Corrigé Thermodynamique USTHB 2012Document4 pagesExamen Corrigé Thermodynamique USTHB 2012mono legasPas encore d'évaluation
- Note de Calcul BNI OUJELDocument5 pagesNote de Calcul BNI OUJELMuhcinePas encore d'évaluation
- DALOTDocument9 pagesDALOTOUEDRAOGO IdrissaPas encore d'évaluation
- Scribd PDFDocument46 pagesScribd PDFmonkeydluffyPas encore d'évaluation
- CodeErreurHIAB Avant 2003Document18 pagesCodeErreurHIAB Avant 2003HTR WAS HERE100% (1)
- Catalogue Pieces Detachess 090517Document145 pagesCatalogue Pieces Detachess 090517GagrigorePas encore d'évaluation
- Memoire de Master: Option: Conception DesDocument48 pagesMemoire de Master: Option: Conception DesKalosoiretrotchgmail.com KalosoPas encore d'évaluation
- Revue Technique GY6Document166 pagesRevue Technique GY6xabi etchebarnePas encore d'évaluation
- Ecoulements Surface LibreDocument39 pagesEcoulements Surface LibreAzzedine GarahPas encore d'évaluation
- ESP TechDocument57 pagesESP Techdid85Pas encore d'évaluation
- Rapport de Stage Maher MNASRIDocument31 pagesRapport de Stage Maher MNASRIjlali tarek100% (1)