Vous aimerez peut-être aussi
- TPs Physique1 MecaniqueDocument13 pagesTPs Physique1 MecaniqueTaki BenazzouzPas encore d'évaluation
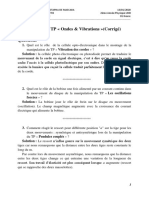
- l2 Phy TP Ondes VibrationsDocument3 pagesl2 Phy TP Ondes VibrationsRayan BiskraPas encore d'évaluation
- TP 1 - 2018Document12 pagesTP 1 - 2018James XgunPas encore d'évaluation
- Rapport Optique 2Document11 pagesRapport Optique 2Emmanuel Vianney100% (2)
- Compte Rendu TP Optique Groupe A22Document37 pagesCompte Rendu TP Optique Groupe A22princemarfo2151999Pas encore d'évaluation
- L Oscilloscope CathodiqueDocument10 pagesL Oscilloscope CathodiqueHassan OubassourPas encore d'évaluation
- TP 01 Electronique 01Document12 pagesTP 01 Electronique 01Hamza MenguellatiPas encore d'évaluation
- TP 1 Mesure Impã©danceDocument7 pagesTP 1 Mesure Impã©danceNesma Mehassouel100% (1)
- TP Optique Physique 4 Manip 2021-2022Document43 pagesTP Optique Physique 4 Manip 2021-2022YassineKharbouchPas encore d'évaluation
- CD ElectricitéDocument9 pagesCD ElectricitéYoussef FaradiPas encore d'évaluation
- Compte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante DiélectriqueDocument13 pagesCompte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante Diélectriquekaoutarmo41Pas encore d'évaluation
- Ob 0956ec Focometrie Des Lentilles Minces ConvergentesDocument5 pagesOb 0956ec Focometrie Des Lentilles Minces ConvergentesAyou HamPas encore d'évaluation
- TP1 - Fiche de SimulationsDocument5 pagesTP1 - Fiche de Simulationsesmorad53Pas encore d'évaluation
- TP Pont de Weatstone Par SimulationDocument5 pagesTP Pont de Weatstone Par SimulationMa ZedPas encore d'évaluation
- Tp6 Mesure D'une Resistance Par VoltmetreDocument3 pagesTp6 Mesure D'une Resistance Par VoltmetreDjamel Boukredimi0% (1)
- TP Sur Les Lois de NewtonDocument5 pagesTP Sur Les Lois de NewtonmedinaPas encore d'évaluation
- Td1 Opt Geo CorrDocument3 pagesTd1 Opt Geo CorrAdri LebPas encore d'évaluation
- Compte Rendu - Pendule SimpleDocument2 pagesCompte Rendu - Pendule SimpleRhassane Maazi100% (1)
- TP 1Document8 pagesTP 1عبدالسلام ارفيسPas encore d'évaluation
- Polycopi TP ELT S2Document28 pagesPolycopi TP ELT S2kkkk100% (1)
- TP N°3 - Détermination de L'énergie Massique de Changement D'état de L'eau 2Document11 pagesTP N°3 - Détermination de L'énergie Massique de Changement D'état de L'eau 2robberberiPas encore d'évaluation
- TP #3 GonimètreDocument17 pagesTP #3 Gonimètreyounes lebosPas encore d'évaluation
- tp2 Diffraction Et InterférenceDocument3 pagestp2 Diffraction Et InterférenceBasiitoPas encore d'évaluation
- TP 2 PenduleDocument4 pagesTP 2 PenduleHdjdkeiPas encore d'évaluation
- Tp3 Mesure Des ResistancesDocument7 pagesTp3 Mesure Des ResistancesMarie Olive FoffiePas encore d'évaluation
- Compte Rendu TP1Document10 pagesCompte Rendu TP1anisPas encore d'évaluation
- Oscilloscope CathodiqueDocument5 pagesOscilloscope Cathodiqueamy ndongPas encore d'évaluation
- TP S4 Rayonnement Du Corps NoirDocument6 pagesTP S4 Rayonnement Du Corps Noirhiba.arouiPas encore d'évaluation
- Pendule de TorsionDocument9 pagesPendule de TorsionyessinePas encore d'évaluation
- TP 1: Détermination de La Vitesse de La Lumière Dans L'air: Réalisée Par: - Encadré ParDocument5 pagesTP 1: Détermination de La Vitesse de La Lumière Dans L'air: Réalisée Par: - Encadré ParILHAM M'HARZI100% (1)
- TP-Cours - Polarisation de La LumièreDocument16 pagesTP-Cours - Polarisation de La LumièreHechmiGarnitPas encore d'évaluation
- Compte Rendu TP 2Document5 pagesCompte Rendu TP 2kamelPas encore d'évaluation
- Test TP 2022Document5 pagesTest TP 2022samer men100% (1)
- Le Pendule Élastique (m4)Document9 pagesLe Pendule Élastique (m4)Madjid Ait MatenPas encore d'évaluation
- Travaux Pratiques Physique Des SemiconducteurDocument5 pagesTravaux Pratiques Physique Des SemiconducteurHouho Dz100% (1)
- TP 11 Spectroscopie A ReseauDocument3 pagesTP 11 Spectroscopie A ReseauMoon Pirates0% (1)
- Correction de L'examen D'optiqueDocument7 pagesCorrection de L'examen D'optiqueOthmane RiyadPas encore d'évaluation
- TP Physique 3Document12 pagesTP Physique 3adhimen abde atifPas encore d'évaluation
- TSP1SP2Ch7T17-TP14 PenduleDocument2 pagesTSP1SP2Ch7T17-TP14 PenduleOtmane El Faih100% (1)
- TP04e Melde 2019Document2 pagesTP04e Melde 2019troudi lamiaPas encore d'évaluation
- Chimie 1 Polycopié RésuméDocument42 pagesChimie 1 Polycopié RésuméSa LimPas encore d'évaluation
- CNC MP 2011 Physique 2 CorrigeDocument14 pagesCNC MP 2011 Physique 2 Corrigefares cherniPas encore d'évaluation
- TP O4 FocométrieDocument5 pagesTP O4 FocométrieMontassar TrabelsiPas encore d'évaluation
- Physique TP10 Lentilles - ConvergentesDocument2 pagesPhysique TP10 Lentilles - ConvergentesHayet DegboudjPas encore d'évaluation
- Détermination de La Constante de PlanckDocument6 pagesDétermination de La Constante de PlanckSALMA FITRIPas encore d'évaluation
- TP Loi D'ohm EricDocument8 pagesTP Loi D'ohm EricNaomi Tuessu100% (1)
- TP DiodesDocument6 pagesTP DiodesayoubPas encore d'évaluation
- Chapitre 1 Et 2 Mesure Et Métrologie 1Document14 pagesChapitre 1 Et 2 Mesure Et Métrologie 1Mehdi Traouli100% (1)
- TP Physique N°02Document8 pagesTP Physique N°02Mallek DjelabPas encore d'évaluation
- Polycopi TP MecDocument22 pagesPolycopi TP MecKhalil Khalil0% (1)
- Compte Rendu TP ElectrocinétiqueDocument6 pagesCompte Rendu TP ElectrocinétiqueSafia Garrouj100% (1)
- TP de Physique Table À Coussin D'air PDFDocument1 pageTP de Physique Table À Coussin D'air PDFJean LeonardoPas encore d'évaluation
- TP 1 OPTIQUE GeometriqueDocument9 pagesTP 1 OPTIQUE GeometriqueHafsa SlamiPas encore d'évaluation
- Oscilloscope PDFDocument8 pagesOscilloscope PDFSaraEAPas encore d'évaluation
- TP S2.Chimie2 - 1STH - 2016-2017Document18 pagesTP S2.Chimie2 - 1STH - 2016-2017slimane33% (3)
- Compte Rendu Final E141 TP 3Document5 pagesCompte Rendu Final E141 TP 3Ayman AmkassouPas encore d'évaluation
- TP 02 Lois de Kirchhoff - 2021-2022Document8 pagesTP 02 Lois de Kirchhoff - 2021-2022tobbal100% (1)
- TP Geiger MullerDocument2 pagesTP Geiger MullerSaid Boustta100% (1)
- Lexique - Les Nouvelles TechnologiesDocument3 pagesLexique - Les Nouvelles Technologiesmaria jesusPas encore d'évaluation
- Đáp Án (Answer Key) Cuốn ETS 2019Document14 pagesĐáp Án (Answer Key) Cuốn ETS 2019Pham NguyenPas encore d'évaluation
- Plan de Ferraillage TablierDocument1 pagePlan de Ferraillage TablierFiras KorPas encore d'évaluation
- 604 S - Eléments de Technologie CAT PDFDocument61 pages604 S - Eléments de Technologie CAT PDFHugo Tia100% (4)
- Management DES ORGANISATIONS PubliquesDocument42 pagesManagement DES ORGANISATIONS PubliquesRandom AccountPas encore d'évaluation
- Reussir Pas A Pas Dans LongrichDocument17 pagesReussir Pas A Pas Dans LongrichAbdoulaye OlaoyePas encore d'évaluation
- Livre PDFDocument166 pagesLivre PDFviviana100% (7)
- Facteurs Dinfluences ExternesDocument2 pagesFacteurs Dinfluences ExternesJean-Luc BastinPas encore d'évaluation
- Communique Officiel Punaise de LitDocument2 pagesCommunique Officiel Punaise de LitMohamed InnekidenePas encore d'évaluation
- H.248 Protocol FRDocument51 pagesH.248 Protocol FRAbdelilah Charboub100% (1)
- Propriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteDocument98 pagesPropriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteNoamNorkhat100% (1)
- Expresiones Coloquiales en FrancésDocument5 pagesExpresiones Coloquiales en FrancésPaul DaugentePas encore d'évaluation
- N18 - Fluidisation PCBDocument17 pagesN18 - Fluidisation PCBrania rejebPas encore d'évaluation
- BclogoDocument31 pagesBclogonour1960Pas encore d'évaluation
- Reactualisation Etudes Impact Block CI PDFDocument252 pagesReactualisation Etudes Impact Block CI PDFAdikoDenzeyAnonhPas encore d'évaluation
- 04 Sigma Binome ChapitreDocument29 pages04 Sigma Binome ChapitrefbdbhdPas encore d'évaluation
- Cahier de Technologie 1er Sec CouleurDocument145 pagesCahier de Technologie 1er Sec CouleurZied BaccarPas encore d'évaluation
- 2021 2022 V1 Applications1 Elements Finis J GasparouxDocument7 pages2021 2022 V1 Applications1 Elements Finis J GasparouxNawel23 MLKPas encore d'évaluation
- Grève de La SNAVDocument27 pagesGrève de La SNAV68ardenPas encore d'évaluation
- Le Passage Du Résultat Comptable Au Résultat FiscalDocument138 pagesLe Passage Du Résultat Comptable Au Résultat Fiscalabouyoucef ABBAD100% (2)
- (1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. VallotDocument262 pages(1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. Vallotnvh92Pas encore d'évaluation
- QCMS EntrainementDocument13 pagesQCMS EntrainementEchafaiPas encore d'évaluation
- Cei FRDocument2 pagesCei FRelmoummyPas encore d'évaluation
- Duo Pour Piano Et GuitareDocument4 pagesDuo Pour Piano Et Guitarecamilo sanabriaPas encore d'évaluation
- OrangeMoney Terms FRDocument26 pagesOrangeMoney Terms FRMVOGO FabienPas encore d'évaluation
- Cours MateriauxDocument6 pagesCours Materiauxbeey2001Pas encore d'évaluation
- CelluloseDocument36 pagesCelluloseYussef Daniel MontplaisirPas encore d'évaluation
- Administrateur Système & ApplicationDocument2 pagesAdministrateur Système & Applicationfokom talom gaetanPas encore d'évaluation
- TP Final InitiationDocument10 pagesTP Final InitiationAgape LwanzoPas encore d'évaluation