Vous aimerez peut-être aussi
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Algorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionD'EverandAlgorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionPas encore d'évaluation
- Synthèse de Régulateurs NumériquesDocument15 pagesSynthèse de Régulateurs NumériquesBADR MTIRAOUIPas encore d'évaluation
- TP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertDocument3 pagesTP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertGhetra hichemPas encore d'évaluation
- Sii Mpsi s03 Cours ReptempslciDocument52 pagesSii Mpsi s03 Cours ReptempslcidestextesecritsPas encore d'évaluation
- ACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rDocument4 pagesACFrOgCFhys05Bx1Kji De3K7TXp KU1Ln4oknoiB-Uo2LRrHJgFWsVLoaYdLmLodqUaufgMyrFDyULzRxffhIAs7Fkqv8ypX3F1K9U 4gBmqAkx6ywxcpFI7nF X1LdxkhSB-84dk7iaUaywa1rBADR MTIRAOUIPas encore d'évaluation
- 1 Sujet BE 1 2 3 2022 RegulDocument6 pages1 Sujet BE 1 2 3 2022 RegulBaptiste CapaiPas encore d'évaluation
- TD 56 Et 7 CE Master II 2019Document17 pagesTD 56 Et 7 CE Master II 2019Mahmoud SettouPas encore d'évaluation
- Cours Auto Chapitre 2Document4 pagesCours Auto Chapitre 2Nabil TAALLAHPas encore d'évaluation
- CHAPITRE III - SDF Automatisme3Document19 pagesCHAPITRE III - SDF Automatisme3zakariamenzer2000Pas encore d'évaluation
- Rapport de Be 1Document21 pagesRapport de Be 1gmbeltrami410Pas encore d'évaluation
- RésuméDocument63 pagesRésuméNadir TenKaichi100% (1)
- Examen1+Solution Commande Des Systèmes LinéairesDocument4 pagesExamen1+Solution Commande Des Systèmes Linéairesmalakkm334Pas encore d'évaluation
- Chapitre VDocument38 pagesChapitre Vhani nasriPas encore d'évaluation
- td3 Version1Document3 pagestd3 Version1SaadElHafidiPas encore d'évaluation
- Co Cel1Document4 pagesCo Cel1sami BoumendjelPas encore d'évaluation
- TD Automatique Systèmes de BaseDocument2 pagesTD Automatique Systèmes de Basefatima zahra el maouiPas encore d'évaluation
- CRR 3 TD2 ChadliDocument3 pagesCRR 3 TD2 ChadliSyphax KERROUCHEPas encore d'évaluation
- Initiation MatlabDocument17 pagesInitiation MatlabSabri AbidiPas encore d'évaluation
- ChapFinal AsservissmentDocument9 pagesChapFinal AsservissmentChris ShulzPas encore d'évaluation
- TD2 PassageRE FTDocument2 pagesTD2 PassageRE FTssafouen4Pas encore d'évaluation
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMDocument7 pagesTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Pas encore d'évaluation
- TPs Automatique 1Document6 pagesTPs Automatique 1HolaPas encore d'évaluation
- TD2 Etude Temporelle Et Fréquentielle Des Système AsservisDocument5 pagesTD2 Etude Temporelle Et Fréquentielle Des Système AsserviskpatchclientsPas encore d'évaluation
- Auto - Sys Chap 1Document14 pagesAuto - Sys Chap 1Adam EL AlamiPas encore d'évaluation
- TPautomatique TIMQ2018Document16 pagesTPautomatique TIMQ2018fatima azalmadPas encore d'évaluation
- Chapitre 1 SEDDocument40 pagesChapitre 1 SEDfaissal rahliPas encore d'évaluation
- B Ident Methodes de BaseDocument24 pagesB Ident Methodes de BaseUlrich NDJIKIPas encore d'évaluation
- Les Automates Programmables IndustrielsDocument65 pagesLes Automates Programmables IndustrielsJawher SalemPas encore d'évaluation
- 3 - Notations Asymptotiques-1Document38 pages3 - Notations Asymptotiques-1Abdelkader MazouniPas encore d'évaluation
- TD Co Version1Document3 pagesTD Co Version1Anass TaouFik75% (4)
- TD02Document3 pagesTD02Aicha B'mhPas encore d'évaluation
- TDDocument4 pagesTDSyphax KERROUCHEPas encore d'évaluation
- TP1 MatlabDocument5 pagesTP1 MatlabwalidPas encore d'évaluation
- TD N°3 Commande Des Systèmes Linéaires Continus M1 CorrigéDocument6 pagesTD N°3 Commande Des Systèmes Linéaires Continus M1 CorrigéMouad ES SoubaaiPas encore d'évaluation
- TP1 AutomatiqueDocument14 pagesTP1 AutomatiqueM'tıraouı BadrPas encore d'évaluation
- TP San 1 22 23Document4 pagesTP San 1 22 23Anfel CPas encore d'évaluation
- TD1Document8 pagesTD1Abdellilah HattabPas encore d'évaluation
- Chapitre 3 - SLMDocument5 pagesChapitre 3 - SLMMuhammad BneijaraPas encore d'évaluation
- TP Sal MatlabDocument7 pagesTP Sal MatlabSaif SA100% (2)
- Série de TD#2 - SLM - 2021 + SolutionDocument6 pagesSérie de TD#2 - SLM - 2021 + SolutionmessiPas encore d'évaluation
- TP Auto S2Document14 pagesTP Auto S2ibrazizi2000Pas encore d'évaluation
- Cours Analyse Harmonique Des Modèles de ReferencesDocument24 pagesCours Analyse Harmonique Des Modèles de ReferencesFranck LecocqPas encore d'évaluation
- Contrôle Automatique CorrigéDocument7 pagesContrôle Automatique CorrigéZakaria BendibPas encore d'évaluation
- Chapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et FerméeDocument104 pagesChapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et Ferméekaoutaramr8Pas encore d'évaluation
- Auto S3 Se1Document1 pageAuto S3 Se1Mostafa BelaaroussiPas encore d'évaluation
- Chater TDDocument1 pageChater TDŤå Ř ÏqPas encore d'évaluation
- Au41 C Chapitre 3Document14 pagesAu41 C Chapitre 3Bassem BhiriPas encore d'évaluation
- Matlab Fip1aDocument7 pagesMatlab Fip1aluxisi10Pas encore d'évaluation
- CHAP1 Régul - Indu 17-18Document17 pagesCHAP1 Régul - Indu 17-18Mohamed ZidanePas encore d'évaluation
- QseDocument14 pagesQseAymen LahmaidiPas encore d'évaluation
- Chapitre 2 - ModélisationDocument35 pagesChapitre 2 - Modélisationkaoutaramr8Pas encore d'évaluation
- Chapitr 1Document12 pagesChapitr 1Salmi AbdelkaderPas encore d'évaluation
- Examen SujetDocument3 pagesExamen SujetLaraig YoussefPas encore d'évaluation
- TD2 Automatique v1Document5 pagesTD2 Automatique v1wissal khammeriPas encore d'évaluation
- A DjeddiDocument7 pagesA DjeddioussamaPas encore d'évaluation
- Correction TP1 PDFDocument8 pagesCorrection TP1 PDFmehdi aoues100% (1)
- TP Electronique Sur MAtlabDocument152 pagesTP Electronique Sur MAtlabnouredine akli100% (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TD 1 Mécanique Des Fluides Avec CorrigeDocument15 pagesTD 1 Mécanique Des Fluides Avec Corrigerayane abbasPas encore d'évaluation
- TP L3 Meca 2024Document49 pagesTP L3 Meca 2024rayane abbasPas encore d'évaluation
- UCA-Rattrapages Touzet 2020Document4 pagesUCA-Rattrapages Touzet 2020rayane abbasPas encore d'évaluation
- Lmeca CM6Document12 pagesLmeca CM6rayane abbasPas encore d'évaluation
- Feuille 3 Exercice 1: Figure 1: Vérin PneumatiqueDocument3 pagesFeuille 3 Exercice 1: Figure 1: Vérin Pneumatiquerayane abbasPas encore d'évaluation
- GuideTechnique LCPC GTPORTANCE PDFDocument28 pagesGuideTechnique LCPC GTPORTANCE PDFMohamed Amine Zemouri100% (1)
- Similitudes 4ème Mathématiques 1Document9 pagesSimilitudes 4ème Mathématiques 1Mohammed GharabPas encore d'évaluation
- Ciem 4Document56 pagesCiem 4NDALAPas encore d'évaluation
- Tréfilage Des Fils Cuivreux Ultra-Fins: Ning YUDocument9 pagesTréfilage Des Fils Cuivreux Ultra-Fins: Ning YUZINE SalouaPas encore d'évaluation
- Hydrometrie: Mesure de Debits Liquides Mesure de Debits SolidesDocument87 pagesHydrometrie: Mesure de Debits Liquides Mesure de Debits SolidesoussamaPas encore d'évaluation
- MVT Plan Doc ProfDocument6 pagesMVT Plan Doc ProfLaurent Bertrand OtabelaPas encore d'évaluation
- Formulation Faible - Wikipédia PDFDocument11 pagesFormulation Faible - Wikipédia PDFvictorienPas encore d'évaluation
- Chapitre 3 CMDocument11 pagesChapitre 3 CMMarie NDOURPas encore d'évaluation
- Simil 001 FDocument3 pagesSimil 001 Fⴰⴱⵓ ⴰⵍⴰⴻ100% (1)
- Le MouvementDocument3 pagesLe Mouvementfarouk benjemaaPas encore d'évaluation
- Serie TD MPD Ecoult Fluides A Travers Milieux PoreuxDocument2 pagesSerie TD MPD Ecoult Fluides A Travers Milieux PoreuxJimmy Hend Khrat100% (2)
- Physique TP5 ProfDocument2 pagesPhysique TP5 ProfImed LatrechPas encore d'évaluation
- Cours Système Dynamiques ECM 2021Document31 pagesCours Système Dynamiques ECM 2021Bassma Ak-hiriPas encore d'évaluation
- Correction Série Probabilités 2 Bac SCDocument8 pagesCorrection Série Probabilités 2 Bac SCNouhaila ChairPas encore d'évaluation
- 1 S2012 DM7 Produit Scalaire 1Document1 page1 S2012 DM7 Produit Scalaire 1Johan FaberPas encore d'évaluation
- DL Béton Précontraint HJDocument10 pagesDL Béton Précontraint HJHAMZA KANANEPas encore d'évaluation
- 2022 MP Rapport Ecrit Maths B (X)Document7 pages2022 MP Rapport Ecrit Maths B (X)Yassin MoakherPas encore d'évaluation
- These JCQDocument159 pagesThese JCQMed larbi MustaphaPas encore d'évaluation
- Corrigé de L'épreuve Du 27 JuinDocument2 pagesCorrigé de L'épreuve Du 27 JuinAime Christian N'drinPas encore d'évaluation
- Chapitre 2 OptiqueDocument20 pagesChapitre 2 OptiquekarimPas encore d'évaluation
- Exercice Arithmétique Bac SDocument4 pagesExercice Arithmétique Bac SMae AboPas encore d'évaluation
- Merged 20200621 021907Document52 pagesMerged 20200621 021907Serge bonel DafonsecaPas encore d'évaluation
- Decharge de CouronneDocument7 pagesDecharge de CouronneOussama Mohammad Messadi100% (1)
- Chapitre2 Résistance Des Matériaux 1Document3 pagesChapitre2 Résistance Des Matériaux 1YattePas encore d'évaluation
- RA20 Lycee GT Ter Philo Simondon 1294346Document17 pagesRA20 Lycee GT Ter Philo Simondon 1294346Isabelle PiconPas encore d'évaluation
- Serie N2 5D PC L Koubeni 2021-2022 EhmeityDocument1 pageSerie N2 5D PC L Koubeni 2021-2022 EhmeityEl Hassen Med MoustaphaPas encore d'évaluation
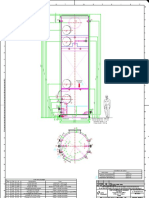
- Plan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRDocument1 pagePlan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRBen Abdallah BecemPas encore d'évaluation
- Cat CSZ Ifc6023 Hm0 CSZ Oi6023 Hm3Document2 pagesCat CSZ Ifc6023 Hm0 CSZ Oi6023 Hm3Adem EssidPas encore d'évaluation
- Code - Aster: Comment Creuser Un Tunnel: Méthodologie D'excavationDocument24 pagesCode - Aster: Comment Creuser Un Tunnel: Méthodologie D'excavationkaoutarPas encore d'évaluation
- Polycope Proba Stat VF2021Document35 pagesPolycope Proba Stat VF2021ouhssaineyoussef69Pas encore d'évaluation