Vous aimerez peut-être aussi
- Exercice Analyse Cinématique D'un MécanismeDocument6 pagesExercice Analyse Cinématique D'un Mécanismeyassine safraouiPas encore d'évaluation
- Eléments de Machines Tome 1 - R.ThibautDocument109 pagesEléments de Machines Tome 1 - R.Thibautmarcoco08Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- INF 0707 Plan D'equipement ASRIDocument61 pagesINF 0707 Plan D'equipement ASRIhocine faliPas encore d'évaluation
- CHAÎNESDocument10 pagesCHAÎNESŤï Må Tï MåPas encore d'évaluation
- RouthDocument2 pagesRouthjfjf19856Pas encore d'évaluation
- Atelier Construction Mecanique 1Document38 pagesAtelier Construction Mecanique 1Rossiny NganiPas encore d'évaluation
- Polycopié Construction Mecanique 1 NewDocument92 pagesPolycopié Construction Mecanique 1 NewAnis LatrechePas encore d'évaluation
- Construction MecaniqueDocument2 pagesConstruction MecaniqueCharavJopabPas encore d'évaluation
- Prinicpe Fondamental StatiqueDocument9 pagesPrinicpe Fondamental StatiqueJp Tauvel100% (1)
- Machines Et Conception Cours V PDFDocument20 pagesMachines Et Conception Cours V PDFFrancis Di-netjerPas encore d'évaluation
- Vocabulaire Des Formes Des Pieces PDFDocument6 pagesVocabulaire Des Formes Des Pieces PDFtagne simo rodriguePas encore d'évaluation
- Exercices Avec Solution StatiqueDocument5 pagesExercices Avec Solution StatiqueJérémy LobetPas encore d'évaluation
- Techniques de Mesure Et de Contrôle PDFDocument10 pagesTechniques de Mesure Et de Contrôle PDFZackaria El IdrissiPas encore d'évaluation
- Mémento Technique de Maintenance Mécanique PDFDocument2 pagesMémento Technique de Maintenance Mécanique PDFbtkmouad100% (1)
- EP1 - Sujet 2013Document11 pagesEP1 - Sujet 2013Herve Le Gonidec100% (1)
- Les VISDocument4 pagesLes VISSlah SametPas encore d'évaluation
- Cinematique GraphiqueDocument3 pagesCinematique GraphiqueFlorianbrutus100% (1)
- La Mort du roi Tsongor de Laurent Gaudé (Fiche de lecture): Analyse complète et résumé détaillé de l'oeuvreD'EverandLa Mort du roi Tsongor de Laurent Gaudé (Fiche de lecture): Analyse complète et résumé détaillé de l'oeuvrePas encore d'évaluation
- Asservissement Matlab SimulinkDocument17 pagesAsservissement Matlab SimulinkSerge Hermann Ménéas100% (1)
- Elements Des MachinesDocument2 pagesElements Des MachinesMahmoud ZakariaPas encore d'évaluation
- 5 Differentes Technologies Pro PDFDocument44 pages5 Differentes Technologies Pro PDFbaptichosendyPas encore d'évaluation
- Baromètre des pratiques de gestion des petites et moyennes entreprises (PME) manufacturières au CamerounD'EverandBaromètre des pratiques de gestion des petites et moyennes entreprises (PME) manufacturières au CamerounPas encore d'évaluation
- Liaisons Completes PART IIDocument15 pagesLiaisons Completes PART IIHamrouniPas encore d'évaluation
- Mode D'emploi D'un Pied À CoulisseDocument1 pageMode D'emploi D'un Pied À CoulisseMohammed teggarPas encore d'évaluation
- Chap1 Vibration Des Systèmes 1ddl VFDocument24 pagesChap1 Vibration Des Systèmes 1ddl VFAbdel ElhamimiPas encore d'évaluation
- CM7-CONAN - Roulement Oblique VFDocument70 pagesCM7-CONAN - Roulement Oblique VFAntonin Donnadieu0% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Chapitre 5Document6 pagesChapitre 5Jean Daniel NgohPas encore d'évaluation
- M3 - Analyse de Fabrication Et Gammes D'usinageDocument138 pagesM3 - Analyse de Fabrication Et Gammes D'usinageTaha ZianePas encore d'évaluation
- Engrennage Ptsi Cours RappelsDocument33 pagesEngrennage Ptsi Cours RappelsCéline LuttiPas encore d'évaluation
- UsinageDocument8 pagesUsinageyousseftrimech4871Pas encore d'évaluation
- Variation de Vitesse (Couple Resistant) PDFDocument3 pagesVariation de Vitesse (Couple Resistant) PDFmounaPas encore d'évaluation
- Compresseur D'air Dari PistonDocument38 pagesCompresseur D'air Dari Pistonhocine gherbiPas encore d'évaluation
- Formulaire BTSDocument17 pagesFormulaire BTSMoussa TirPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- Catalogue Eb 2014 FR Complet PDFDocument303 pagesCatalogue Eb 2014 FR Complet PDFeuqehtbPas encore d'évaluation
- CH 2 Introduction Au Clacul Des Elements de MachinesDocument12 pagesCH 2 Introduction Au Clacul Des Elements de Machineskarima alem100% (1)
- Cours MEF ENISo-2020-2021Document60 pagesCours MEF ENISo-2020-2021Hassine TarekPas encore d'évaluation
- 03 Statique AnalytiqueDocument5 pages03 Statique Analytiquewilliandry NDJEWEPas encore d'évaluation
- XR6 (1)Document50 pagesXR6 (1)andoPas encore d'évaluation
- Filtage TaraudageDocument10 pagesFiltage Taraudagebenzerga karimPas encore d'évaluation
- Manuel ChainesDocument46 pagesManuel ChainesaminePas encore d'évaluation
- M20 Arbres Roulements Et Coussinets EM-GE-EMDocument65 pagesM20 Arbres Roulements Et Coussinets EM-GE-EMMohssin Ben Hammou100% (3)
- 6 Systèmes Lubrification CentraliséeDocument15 pages6 Systèmes Lubrification Centraliséekhaled kamel Bouabdallah100% (1)
- TMM Intro Chap1Document10 pagesTMM Intro Chap1lephilo57100% (1)
- Démarrage Un Sens de MarcheDocument24 pagesDémarrage Un Sens de MarcheJean Claude KonanPas encore d'évaluation
- Cours Cinmatique MVT Plan EquiprojectivitDocument2 pagesCours Cinmatique MVT Plan EquiprojectivitsallsmartPas encore d'évaluation
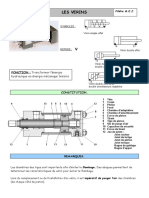
- 06 - Les VérinsDocument1 page06 - Les Vérinsعالي موسي صارPas encore d'évaluation
- Ingénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Document272 pagesIngénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Jacques BONOU100% (1)
- Montage Roulements: Frottement MobileDocument13 pagesMontage Roulements: Frottement MobileOthmänë El HimessPas encore d'évaluation
- Moments-Couples-Résultantes (Présentation)Document29 pagesMoments-Couples-Résultantes (Présentation)kaoenergiepPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- TFM M23 Mathematiques Et Mecanique appliquees-FM-TFMDocument103 pagesTFM M23 Mathematiques Et Mecanique appliquees-FM-TFMAhmed DjebbiPas encore d'évaluation
- Analyse Fonctionnel Complet PubDocument26 pagesAnalyse Fonctionnel Complet PubSdferwste SrqrePas encore d'évaluation
- Aides TP1 HydrauliqueDocument28 pagesAides TP1 HydrauliqueBebana Mohamed LeminPas encore d'évaluation
- Chapitre 1 Principe de Conception en MécaniqueDocument19 pagesChapitre 1 Principe de Conception en Mécaniquebassel_1Pas encore d'évaluation
- Cours 1 Pour 1er Année PMI FAB 1Document5 pagesCours 1 Pour 1er Année PMI FAB 1Ayoub BenhajajPas encore d'évaluation
- CristallographieDocument15 pagesCristallographieSoufiane BounezraPas encore d'évaluation
- Plann de Travail Sujet 02Document1 pagePlann de Travail Sujet 02Soufiane BounezraPas encore d'évaluation
- Fraisage 4Document10 pagesFraisage 4Soufiane BounezraPas encore d'évaluation
- Montage de Roulements PrecautionsDocument1 pageMontage de Roulements PrecautionsSoufiane BounezraPas encore d'évaluation
- WL 80 100 - 3 FB-11 - 03Document114 pagesWL 80 100 - 3 FB-11 - 03Soufiane BounezraPas encore d'évaluation
- Van de GraaafffDocument126 pagesVan de GraaafffHAMID OUCHAGHOUIPas encore d'évaluation
- MGdess100 PDFDocument51 pagesMGdess100 PDFamrPas encore d'évaluation
- Chapitre I Introduction Aux Modes de TransfertDocument7 pagesChapitre I Introduction Aux Modes de TransfertroffaaPas encore d'évaluation
- Chapitre 6 ExercicesDocument18 pagesChapitre 6 ExercicesEl Youbi MohammedPas encore d'évaluation
- I.3.4 TP Structure de L'atomeDocument2 pagesI.3.4 TP Structure de L'atomevaldx100% (1)
- RMChap5 (Cisaillement)Document33 pagesRMChap5 (Cisaillement)maraghni_hassine7592Pas encore d'évaluation
- Tableau PeriodiqueDocument10 pagesTableau Periodiquescribder555Pas encore d'évaluation
- Flexion Des Poutres Isostatiques Aux ELS PDFDocument41 pagesFlexion Des Poutres Isostatiques Aux ELS PDFAnonymous xJs23KoroOPas encore d'évaluation
- Calcul Des CuléesDocument18 pagesCalcul Des Culéessabri rabiePas encore d'évaluation
- Etude FondationDocument3 pagesEtude Fondationkader100% (1)
- Module 2: Déterminant D'une MatriceDocument6 pagesModule 2: Déterminant D'une MatriceEden BenPas encore d'évaluation
- TD Séries FourierDocument3 pagesTD Séries FourierMohamed OuaggaPas encore d'évaluation
- Minesponts 2008 Phy1 MP PDFDocument4 pagesMinesponts 2008 Phy1 MP PDFAymen DanounPas encore d'évaluation
- Cours de Topographiefinale - PDocument18 pagesCours de Topographiefinale - Pkodjo100% (1)
- Bases Physiques de La Musique - Henri Bouasse (1906)Document120 pagesBases Physiques de La Musique - Henri Bouasse (1906)kenkyosan100% (1)
- Proprietes Mecaniques Des Polymeres A L'etat Solide 2010Document1 pageProprietes Mecaniques Des Polymeres A L'etat Solide 2010LeifEricssonPas encore d'évaluation
- STATIQUE v3.8 PDFDocument132 pagesSTATIQUE v3.8 PDFMidoviç SultanPas encore d'évaluation
- Sujet EF2 Maths Épreuve Facultative BTSDocument2 pagesSujet EF2 Maths Épreuve Facultative BTSNedrosatPas encore d'évaluation
- Stat MercierDocument413 pagesStat Merciern_ikPas encore d'évaluation
- Physique Chimie: Tout-En-UnDocument50 pagesPhysique Chimie: Tout-En-UnPoul PoulPas encore d'évaluation
- Trigo 1Document19 pagesTrigo 1Samba Sall100% (1)
- FLENDER AccouplementsStandard FR201103Document280 pagesFLENDER AccouplementsStandard FR201103AlexandreCaironiPas encore d'évaluation
- NF P 82-201Document42 pagesNF P 82-201Rabia Mricha75% (4)
- Commande AxesDocument20 pagesCommande AxeshassankchPas encore d'évaluation
- PDF TP Bioch BGFDocument28 pagesPDF TP Bioch BGFnajahfitna81% (21)
- RDM LivreDocument178 pagesRDM LivreYacine OAPas encore d'évaluation
- (RDM) (FO) Resistance Des MateriauxDocument2 pages(RDM) (FO) Resistance Des MateriauxSimoMonkadPas encore d'évaluation
- Trans Lgam1 PDFDocument0 pageTrans Lgam1 PDFmecanicametalPas encore d'évaluation
- Evlc DistributionsDocument112 pagesEvlc DistributionsTëddÿ EnissângPas encore d'évaluation
- Thermodynamique II Serie N°1 SMP 3 2013-2014 FSR by Exosup PDFDocument6 pagesThermodynamique II Serie N°1 SMP 3 2013-2014 FSR by Exosup PDFzamora_1985Pas encore d'évaluation