Vous aimerez peut-être aussi
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Électronique Flexible: Votre corps va interagir avec l'électronique flexibleD'EverandÉlectronique Flexible: Votre corps va interagir avec l'électronique flexiblePas encore d'évaluation
- Exercices Audit General Fsjes 19 20 PDFDocument6 pagesExercices Audit General Fsjes 19 20 PDFroudaniPas encore d'évaluation
- Systèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentD'EverandSystèmes De Communication Véhiculaire: Les perspectives d'avenir du transport intelligentPas encore d'évaluation
- Transfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routeD'EverandTransfert De Puissance Sans Fil: Recharger les véhicules électriques pendant qu'ils sont sur la routePas encore d'évaluation
- ANIMAUX D'ELEVAGE Au Cameroun PDFDocument109 pagesANIMAUX D'ELEVAGE Au Cameroun PDFkroPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Porte Metallique Techniques Catalogue PDFDocument210 pagesPorte Metallique Techniques Catalogue PDFClay Rios100% (1)
- Moteur Variateur PDFDocument4 pagesMoteur Variateur PDFElmehdi ElmessaoudiPas encore d'évaluation
- Moteurs SpéciauxDocument7 pagesMoteurs SpéciauxMoulayMoulyPas encore d'évaluation
- TP n1 API Tutorial LD IlDocument7 pagesTP n1 API Tutorial LD IlZineb TALIMAPas encore d'évaluation
- Entrées Et Sorties AnalogiquesDocument5 pagesEntrées Et Sorties AnalogiquesarnaudmarielPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Feuille D'exercices Sur Le Chapitre 2Document3 pagesFeuille D'exercices Sur Le Chapitre 2Ilyes OunnediPas encore d'évaluation
- Stockage D'Énergie Du Volant: Augmenter ou diminuer la vitesse, pour ajouter ou extraire de la puissanceD'EverandStockage D'Énergie Du Volant: Augmenter ou diminuer la vitesse, pour ajouter ou extraire de la puissancePas encore d'évaluation
- Commande de MoteurDocument19 pagesCommande de MoteurYoussef Mesbah100% (1)
- Automatisme Et SystèmeDocument2 pagesAutomatisme Et SystèmeGeraud Russel Goune ChenguiPas encore d'évaluation
- Cours APIDocument19 pagesCours APIKhalid Sina100% (1)
- AssLin 00 PlanCoursDocument3 pagesAssLin 00 PlanCourslacothPas encore d'évaluation
- Ilunga Wa Lunda Ariel, Mwehu Banza Samson, Kasang Kanyimb FlorenceDocument8 pagesIlunga Wa Lunda Ariel, Mwehu Banza Samson, Kasang Kanyimb Florenceariel wa lunda100% (1)
- Automate Tsx37Document23 pagesAutomate Tsx37walidjafPas encore d'évaluation
- TP1 - Initiation Au Logiciel ProteusDocument9 pagesTP1 - Initiation Au Logiciel ProteusHamza GuitnaPas encore d'évaluation
- Freinage DynamiqueDocument12 pagesFreinage Dynamiqueramzi2521Pas encore d'évaluation
- Chapitre II Hacheur SérieDocument8 pagesChapitre II Hacheur SérieAmIne OmdaPas encore d'évaluation
- Synthese RelaisDocument2 pagesSynthese RelaisMaxence KouessiPas encore d'évaluation
- Cours No.6 PDFDocument60 pagesCours No.6 PDFWolfpackxx86Pas encore d'évaluation
- Cours Electronique de Puissance Advancee Master v02Document96 pagesCours Electronique de Puissance Advancee Master v02Azemba Toussaint100% (1)
- TP Elp 3 LaDocument10 pagesTP Elp 3 LaHadil SellamiPas encore d'évaluation
- Cours Transfo ParfaitDocument8 pagesCours Transfo Parfaitlilasaid2010Pas encore d'évaluation
- TD TriphaseDocument3 pagesTD TriphaseEZ-ZYANI IMANE100% (1)
- Commande Electronique Des Machines ElectriquesDocument28 pagesCommande Electronique Des Machines ElectriqueshassenbbPas encore d'évaluation
- CompteurDocument28 pagesCompteurJoyce TsopbengPas encore d'évaluation
- Onduleur A MLIDocument50 pagesOnduleur A MLIAbdesslam GuennouniPas encore d'évaluation
- TD Api EmiDocument61 pagesTD Api EmiYoussef El AjraouiPas encore d'évaluation
- TPETIDocument10 pagesTPETISam DikoPas encore d'évaluation
- 4.chap.4 Automatisme Et Informatique IndustrielleDocument8 pages4.chap.4 Automatisme Et Informatique IndustrielleHkbv GjvcPas encore d'évaluation
- Cours CondensateursDocument14 pagesCours CondensateursArounan DembelePas encore d'évaluation
- Dossier Installation DomestiqueDocument7 pagesDossier Installation DomestiquedumdulumPas encore d'évaluation
- Fonctionnement Et Contrôle Des Composants Électroniques Par BENYAROU Mourad PDFDocument13 pagesFonctionnement Et Contrôle Des Composants Électroniques Par BENYAROU Mourad PDFMiliani AhmedPas encore d'évaluation
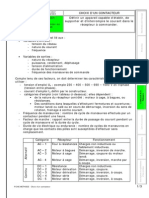
- F Choix D'un ContacteurDocument3 pagesF Choix D'un ContacteurYacine MarichePas encore d'évaluation
- Demarrage Des Moteurs - V2k6Document28 pagesDemarrage Des Moteurs - V2k6Jamel Riahi100% (1)
- Electronique de PuissanceDocument13 pagesElectronique de PuissanceYassine OumaaliPas encore d'évaluation
- Redress EursDocument44 pagesRedress EursNi HedPas encore d'évaluation
- Devoir EPDocument1 pageDevoir EPAhmad WhabiPas encore d'évaluation
- Cours Électronique de PuissanceDocument52 pagesCours Électronique de PuissanceAyoub TioualePas encore d'évaluation
- Equipements CaractéristiquesDocument17 pagesEquipements CaractéristiquesGaël LokoPas encore d'évaluation
- Mini Projet NS544-ConvertiDocument13 pagesMini Projet NS544-ConvertiKhiri MohamedaymenPas encore d'évaluation
- Analyse de La FiabilitéDocument11 pagesAnalyse de La FiabilitéKlaid NyamsiPas encore d'évaluation
- TP FlowcodeDocument11 pagesTP Flowcodekurts010Pas encore d'évaluation
- 675-Estimation Du Débit en Fonction de La Position de La VanneDocument3 pages675-Estimation Du Débit en Fonction de La Position de La Vannerequin2101Pas encore d'évaluation
- Securite ElectriqueDocument12 pagesSecurite Electriquehamm_samPas encore d'évaluation
- TDDocument2 pagesTDHamid BendjelloulPas encore d'évaluation
- Monostable AstableDocument7 pagesMonostable Astablekonan franckPas encore d'évaluation
- Cours Redressement Comm PDFDocument6 pagesCours Redressement Comm PDFLLDODPas encore d'évaluation
- ExoDocument29 pagesExoMahj AyouPas encore d'évaluation
- SujetDocument24 pagesSujetAyman LamzouriPas encore d'évaluation
- Poster Template Pour LicenceDocument1 pagePoster Template Pour LicenceSidahmed LarbaouiPas encore d'évaluation
- Cours MCC GEA1 ENIGDocument65 pagesCours MCC GEA1 ENIGhnainiamedamine28Pas encore d'évaluation
- EP CoursDocument126 pagesEP CoursBensalemPas encore d'évaluation
- Regulation de Temperatur PidDocument8 pagesRegulation de Temperatur PidabdoPas encore d'évaluation
- DS PV3543 FR FR 76436Document6 pagesDS PV3543 FR FR 76436Sabi BORDJIHANEPas encore d'évaluation
- Sujet Principal - BTS - BAT - 2017Document2 pagesSujet Principal - BTS - BAT - 2017Hasnae Ben khaldounPas encore d'évaluation
- Cycle de Vie Dune VoitureDocument75 pagesCycle de Vie Dune VoitureIheb BelhsanPas encore d'évaluation
- 1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFDocument18 pages1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFGuyMoquette100% (1)
- Dossier Professionnel Arnaud VinckeDocument25 pagesDossier Professionnel Arnaud Vinckeanthony.grassiproPas encore d'évaluation
- Autocad Structure 2011 PDFDocument1 pageAutocad Structure 2011 PDFAlseni SoumahPas encore d'évaluation
- Rapport Final PER Volume1 - Octobre 2009Document166 pagesRapport Final PER Volume1 - Octobre 2009Arnaud RAOUMBAPas encore d'évaluation
- Magoe Cours Electrotech 2015Document53 pagesMagoe Cours Electrotech 2015mykherinossaoromouPas encore d'évaluation
- Introduction Aux AlgorigrammesDocument37 pagesIntroduction Aux AlgorigrammesIsabelle54Pas encore d'évaluation
- Les Idées Qu'exprime La Nourrice en Ce Qui Concerne Les FillesDocument2 pagesLes Idées Qu'exprime La Nourrice en Ce Qui Concerne Les FillesSouhaila Nagib100% (2)
- 1981 Rahan (Divers) - Bibliothèque de Travail (BT) : Naissance D'une Bande Dessinée: RahanDocument2 pages1981 Rahan (Divers) - Bibliothèque de Travail (BT) : Naissance D'une Bande Dessinée: RahanFrédéric GonetPas encore d'évaluation
- Cours 1 Anapath - Mode de CompatibilitéDocument46 pagesCours 1 Anapath - Mode de Compatibilitémanalyoubi00Pas encore d'évaluation
- Monétique CamiDocument6 pagesMonétique CamiCam EliaPas encore d'évaluation
- Cours - Math Etude de Fonction - Bac Toutes Sections (2013-2014) MR Khammour KhalilDocument2 pagesCours - Math Etude de Fonction - Bac Toutes Sections (2013-2014) MR Khammour KhalilibxxxPas encore d'évaluation
- Toussaint Cahier de Vacances Gratuit GS MaternelleDocument13 pagesToussaint Cahier de Vacances Gratuit GS Maternelleroums65Pas encore d'évaluation
- Moteur CCDocument10 pagesMoteur CCMohamed MouchrifPas encore d'évaluation
- Sapa Dépliant Candelabres en AluminiumDocument2 pagesSapa Dépliant Candelabres en AluminiumPole Products (formerly Sapa)Pas encore d'évaluation
- 25 Objectifs Per Ted Gunderson PDFDocument12 pages25 Objectifs Per Ted Gunderson PDFFabrice BectPas encore d'évaluation
- Sujets Entrainement SixiemeDocument12 pagesSujets Entrainement SixiemeAntonio DanielsPas encore d'évaluation
- TdcisailDocument1 pageTdcisailMohamedBejjaPas encore d'évaluation
- Dcnum Ouvrir ProgDocument2 pagesDcnum Ouvrir Progapi-489017636Pas encore d'évaluation
- Oeuvres de Napoléon Bonaparte IV-VDocument35 pagesOeuvres de Napoléon Bonaparte IV-VRaúl Ignacio GaraycocheaPas encore d'évaluation
- Zootechnie - SP - Ciale - Docx Filename - UTF-8''zootechnie SpécialeDocument52 pagesZootechnie - SP - Ciale - Docx Filename - UTF-8''zootechnie SpécialeAhmed MessabihPas encore d'évaluation
- Biochimie-Révélateurs SynthèseDocument18 pagesBiochimie-Révélateurs SynthèseAntonios MpasinasPas encore d'évaluation
- Séance 3-Jeu Let's BioDocument4 pagesSéance 3-Jeu Let's BioYosr charekPas encore d'évaluation
- Article de L'expérience À La Théorie Esthétique PDFDocument47 pagesArticle de L'expérience À La Théorie Esthétique PDFLassaad Jamoussi100% (1)